Annexe
TABLE DES
TAILLES DE FIL:
Le calibre spécifié pour une
utilisation dans des designs est ' American Wire Gauge ' donc un tableau
comparatif montrant le ' Standard Wire Gauge'
de
|
AWG |
Dia mm |
Area sq. mm |
SWG |
Dia mm |
Area sq. mm |
Max Amps |
Ohms / metre |
Metres Per 500g |
Max Hz |
|
1 |
7.35 |
42.40 |
2 |
7.01 |
38.60 |
119 |
|
|
325 |
|
2 |
6.54 |
33.60 |
3 |
6.40 |
32.18 |
94 |
|
|
410 |
|
3 |
5.88 |
27.15 |
4 |
5.89 |
27.27 |
75 |
|
|
500 |
|
4 |
5.19 |
21.20 |
6 |
4.88 |
18.68 |
60 |
|
|
650 |
|
5 |
4.62 |
16.80 |
7 |
4.47 |
15.70 |
47 |
|
|
810 |
|
6 |
4.11 |
13.30 |
8 |
4.06 |
12.97 |
37 |
|
|
1,100 |
|
7 |
3.67 |
10.60 |
9 |
3.66 |
10.51 |
30 |
|
|
1,300 |
|
8 |
3.26 |
8.35 |
10 |
3.25 |
8.30 |
24 |
|
|
1,650 |
|
9 |
2.91 |
6.62 |
11 |
2.95 |
6.82 |
19 |
|
|
2,050 |
|
10 |
2.59 |
5.27 |
12 |
2.64 |
5.48 |
15 |
0.0042 |
|
2,600 |
|
11 |
2.30 |
4.15 |
13 |
2.34 |
4.29 |
12 |
0.0047 |
|
3,200 |
|
12 |
2.05 |
3.31 |
14 |
2.03 |
3.49 |
9.3 |
0.0053 |
17.5 m |
4,150 |
|
13 |
1.83 |
2.63 |
15 |
1.83 |
2.63 |
7.4 |
0.0068 |
|
5,300 |
|
14 |
1.63 |
2.08 |
16 |
1.63 |
2.08 |
5.9 |
0.0083 |
27 m |
6,700 |
|
15 |
1.45 |
1.65 |
17 |
1.42 |
1.59 |
4.7 |
0.0135 |
|
8,250 |
|
16 |
1.29 |
1.31 |
18 |
1.219 |
1.17 |
3.7 |
0.0148 |
48 m |
11 kHz |
|
17 |
1.15 |
1.04 |
|
|
|
2.9 |
0.0214 |
|
13 kHz |
|
18 |
1.024 |
0.823 |
19 |
1.016 |
0.811 |
2.3 |
0.027 |
|
17 kHz |
|
19 |
0.912 |
0.653 |
20 |
0.914 |
0.657 |
1.8 |
0.026 |
85 m |
21 kHz |
|
20 |
0.812 |
0.519 |
21 |
0.813 |
0.519 |
1.5 |
0.036 |
|
27 kHz |
|
21 |
0.723 |
0.412 |
22 |
0.711 |
0.397 |
1.2 |
0.043 |
140 m |
33 kHz |
|
22 |
0.644 |
0.325 |
23 |
0.610 |
0.292 |
0.92 |
0.056 |
|
42 kHz |
|
23 |
0.573 |
0.259 |
24 |
0.559 |
0.245 |
0.729 |
0.070 |
225 m |
53 kHz |
|
24 |
0.511 |
0.205 |
25 |
0.508 |
0.203 |
0.577 |
0.087 |
|
68 kHz |
|
25 |
0.455 |
0.163 |
26 |
0.457 |
0.164 |
0.457 |
0.105 |
340 m |
85 kHz |
|
26 |
0.405 |
0.128 |
27 |
0.417 |
0.136 |
0.361 |
0.130 |
|
107 kHz |
|
27 |
0.361 |
0.102 |
28 |
0.376 |
0.111 |
0.288 |
0.155 |
500 m |
130 kHz |
|
28 |
0.321 |
0.0804 |
30 |
0.315 |
0.0779 |
0.226 |
0.221 |
700 m |
170 kHz |
|
29 |
0.286 |
0.0646 |
32 |
0.274 |
0.0591 |
0.182 |
0.292 |
950 m |
210 kHz |
|
30 |
0.255 |
0.0503 |
33 |
0.254 |
0.0506 |
0.142 |
0.347 |
1125 m |
270 kHz |
|
31 |
0.226 |
0.0401 |
34 |
0.234 |
0.0428 |
0.113 |
0.402 |
1300 m |
340 kHz |
|
32 |
0.203 |
0.0324 |
36 |
0.193 |
0.0293 |
0.091 |
0.589 |
1900 m |
430 kHz |
|
33 |
0.180 |
0.0255 |
37 |
0.173 |
0.0234 |
0.072 |
0.767 |
2450 m |
540 kHz |
|
34 |
0.160 |
0.0201 |
38 |
0.152 |
0.0182 |
0.056 |
0.945 |
3000 m |
690 kHz |
|
35 |
0.142 |
0.0159 |
39 |
0.132 |
0.0137 |
0.044 |
1.212 |
3700 m |
870 kHz |
FRANK FECERA: MOTEUR À AIMANT PERMANENT
Brevet US 6 867 514 B2 15 mars 2005 Inventeur: Frank J. Fecera
MOTEUR
À AIMANT PERMANENT
Cette demande de brevet
montre les détails d'un moteur à aimant permanent. Il est à noter que, alors
que dans ce texte, Frank affirme que les aimants permanents stockent une
quantité finie de magnétisme, en effet, les pôles de l'aimant forment un dipôle
qui provoque un écoulement continu d'énergie tirée de la mousse quantique de
notre univers, et que l'écoulement continue jusqu'à ce que le dipôle est
détruit. L'énergie qui alimente un moteur à aimant permanent est livré
directement depuis le domaine de l'énergie du point zéro et pas en fait de
l'aimant lui-même. Un morceau de fer peut être converti en un aimant par une
impulsion magnétique unique nanosecondes. Il est insensé qu'une impulsion de
cette durée peut offrir des mois de puissance continue de quoi que ce soit
stocké dans l'aimant lui-même, mais il est parfaitement logique, si cette brève
impulsion créé un dipôle magnétique qui agit comme une passerelle pour l'apport
d'énergie du point zéro de l'environnement.
RÉSUMÉ
Un moteur fournissant la puissance motrice
de rotation unidirectionnelle est fourni. Le moteur comporte un
stator généralement circulaire avec un axe de stator, surface extérieure et une
ligne circonférentielle de démarcation au sujet un point médian de la surface
extérieure. Le moteur comprend aussi un ou plusieurs aimants du stator attachés
à la surface externe du stator. Les aimants du stator sont disposées dans un
arrangement généralement circulaire autour de l'axe du stator et créent un
champ magnétique première. Une
armature est attachée au stator afin qu'elle tourne avec lui, l'armature ayant
un axe parallèle à l'axe du stator. Un ou plusieurs rotors, sont espacées de
l'induit et couplé par un axe pour permettre à chaque rotor de tourner autour
d'un axe, chaque rotor tourne dans un plan généralement aligné sur l'axe de
l'induit. Chaque rotor comprend un ou plusieurs aimants de rotor, avec chaque
aimant rotor générant un deuxième champ magnétique. Le second champ magnétique
généré par chaque aimant rotor interagit avec le champ magnétique première,
provoque chaque rotor en rotation autour de l'axe du rotor. Un lecteur de
l'Assemblée de liaison relie chaque rotor au redresseur de causer l'induit en
rotation autour de l'axe de l'armature permettant ainsi la rotation
unidirectionnelle de propulsion du moteur.
CONTEXTE DE
L'INVENTION
Cette invention se rapporte
aux structures de moteur électrique dynamo et moteurs à un aimant permanent
plus particulièrement aux rotatif et linéaire. Moteurs électriques
conventionnels dépendent de l'interaction des champs magnétiques pour produire
une force qui se traduit par un mouvement rotatif ou linéaire. Les champs
magnétiques dans des moteurs électriques conventionnels alimente votre
équipement rotatif, sont générées en passant un courant électrique externe
fourni par le biais de conducteurs en soit un stator (c.-à-d. la partie fixe du
moteur), un rotor (c.-à-d. la partie rotative) ou le stator et le rotor. La
puissance du moteur rotative découle d'un champ magnétique tournant qui est
créé par la commutation du courant électrique, soit par une commutation du
courant par le biais de différents chefs d'orchestre, comme dans un moteur à
courant continu ou par une inversion de la polarité du courant électrique que
dans un moteur à courant alternatif.
Il est bien connu
qu'une catégorie de matériaux appelés matériaux ferromagnétiques sont aussi
capables de générer un champ magnétique ayant une fois été excité. Les
matériaux ferromagnétiques avec haute coercivité sont connus comme des aimants
permanents. Aimants permanents sont capables de stocker une quantité finie
d'énergie et en conservant la possibilité de générer un champ magnétique
important jusqu'à ce que l'énergie stockée est épuisé.
Il y a des moteurs
électriques qui utilisent des aimants permanents dans la portion du stator du
moteur ou la partie du rotor du moteur. Ces moteurs d'atteindre une taille
petite pour la quantité de puissance produite par le moteur parce que les
moteurs ne pas avoir cours transportant des conducteurs pour produire le champ
magnétique qui est par ailleurs produit par les aimants permanents. Cependant, ces moteurs classiques à un
aimant permanent nécessitent toujours une source d'alimentation externe pour
produire un champ magnétique tournant.
Il ya eu aussi des moteurs développés à un
aimant permanent qui utilisent des aimants permanents pour le stator et le
rotor. Par exemple, US Pat. No 4 598 221 divulgue un moteur à aimant permanent
qui s'appuie sur une source d'énergie pour faire tourner les champs magnétiques
d'un rotor de 90 degrés par rapport à l'interaction des champs magnétiques stator
afin d'éliminer la répulsion magnétique contre-productif et l'attraction entre
le rotor et les aimants du stator extérieure. Autre exemple: US Pat. No 4 882
509 révèle un moteur à aimant permanent qui s'appuie sur une source externe de
puissance pour placer un bouclier qui ne permet pas de couplage entre le rotor
et les aimants du stator parfois lors de l'attraction ou la répulsion pourrait
glisser vers le bas de la puissance du moteur.
Il existe de nombreux cas où une action
moteur est requise et aucune source d'alimentation externe n'est disponible.
Par conséquent, un moteur qui repose uniquement sur l'énergie stockée dans les
aimants permanents serait utile.
BREF RÉSUMÉ DE L'INVENTION
En bref, la présente invention comprend un
rotor pour utilisation dans un moteur à aimant permanent et pour fournir la
force motrice de rotation du rotor autour d'un axe de rotor. Le rotor est
composé d'au moins un aimant en forme de U première ayant un côté arrière et
générant un champ magnétique première. La rotation du rotor sur l'axe du rotor
est causée par une interaction d'une partie du premier champ magnétique
directement adjacent à l'arrière de l'aimant en U au moins un avec le deuxième
champ magnétique stationnaire.
Un autre aspect de la
présente invention comprend un rotor fournissant la puissance motrice par une
rotation du rotor sur l'axe du rotor et une traduction du rotor dans le sens de
l'axe du rotor. Le rotor est composé : un aimant en forme de U première ayant
un pôle Nord et un pôle Sud, une face arrière, l'aimant en forme de U première
générant un champ magnétique première ; un deuxième aimant en forme de U, ayant
un pôle Nord et un pôle Sud, pôle sud de l'aimant en U deuxième jouxtant le
pôle Nord de l'aimant en forme de U première ; et un troisième aimant en forme
de U, ayant un pôle Nord et un pôle Sud, pôle Nord de l'aimant en U troisième
attenante à pôle sud de l'aimant en forme de U première. Une partie du premier
champ magnétique généré par l'aimant en forme de U première directement
adjacent à l'arrière de l'aimant en forme de U première interagit avec le
quatrième champ magnétique stationnaire pour entraîner le rotor en rotation. Un
deuxième champ magnétique généré par le pôle Nord du deuxième en U aimant et un
troisième champ magnétique généré par le pôle sud de l'aimant en U troisième
interagissent avec le quatrième champ magnétique provoque le rotor à traduire
dans la direction de l'axe du rotor.
Un autre aspect de la
présente invention comprend un rotor comprenant un axe de rotor et un axe de
propulseur dans un plan du rotor et l'intersection de l'axe du rotor. Le rotor
fournit la force motrice par une rotation du rotor sur l'axe du rotor et une
traduction du rotor dans le sens de l'axe du rotor. Le rotor est composé : un
aimant en forme de U première ayant un pôle Nord et un pôle Sud et une face
arrière, le pôle Nord et pôle Sud étant généralement aligné sur l'axe de
propulseur, l'aimant en forme de U première générant un champ magnétique
première ; un aimant de propulseur première ayant un gisement de magnétisation
généralement aligné avec l'axe de propulseur aimant, l'aimant de premier
propulseur étant proche de celle des et espacés du pôle Nord de l'aimant en
forme de U première ; et un deuxième aimant propulseur ayant un gisement de
magnétisation généralement aligné sur l'axe d'aimant de propulseur, le deuxième
aimant propulseur étant près d'et espacées au pôle sud de l'aimant en forme de
U première, l'aimant en forme de U première étant intercalé entre le premier et
les deuxième aimants de propulseur. Une partie du premier champ magnétique
généré par l'aimant en forme de U première directement adjacent à l'arrière de
l'aimant en forme de U première interagit avec le quatrième champ magnétique
stationnaire pour entraîner le rotor en rotation, un second champ magnétique
généré par le premier propulseur aimant et un troisième champ magnétique généré
par le deuxième aimant propulseur respectivement interagissent avec le
cinquième champ magnétique stationnaire pour entraîner le rotor à traduire dans
la direction de l'axe du rotor.
Un autre aspect de la
présente invention comprend une fournissant la puissance motrice du rotor par
la rotation du rotor autour d'un axe de rotor et traduction du rotor dans la
direction de l'axe du rotor. Le rotor a au moins un aimant rotor générant un
premier champ magnétique, le premier champ magnétique généré par l'aimant du
rotor interagissant au moins un stationnaire aimant en forme de U, l'aimant en
forme de U, ayant un côté arrière et générer un second champ magnétique. La
rotation et de translation force motrice du rotor est fournie par une
interaction entre une partie du deuxième champ magnétique directement adjacent
à l'arrière de l'aimant en forme de U avec le premier champ magnétique.
Un autre aspect de la
présente invention comprend un moteur fournissant la puissance motrice de
rotation unidirectionnelle. Le moteur comprend un stator généralement
circulaire ayant un axe de stator, surface extérieure et une ligne
circonférentielle de démarcation au sujet un point médian de la surface
extérieure ; au moins un aimant du stator attaché à la surface externe du
stator, l'aimant du stator au moins un étant disposées dans un arrangement
généralement circulaire autour de l'axe du stator et générant un champ
magnétique première ; une armature attachée au redresseur pour la rotation avec
elle ; l'armature ayant un axe parallèle à l'axe du stator ; au moins un rotor,
le rotor étant espacés de l'induit et couplé par un axe pour permettre la
rotation autour d'un axe du rotor, le rotor tourne dans un plan généralement
aligné sur l'axe de l'induit, le rotor, dont au moins un aimant générant un
deuxième champ magnétique, où le deuxième champ magnétique généré par l'aimant
du rotor interagit avec le champ magnétique première pour entraîner le rotor en
rotation autour de son axe ; et un train de roulement de liaison reliant le
rotor au redresseur de causer l'induit en rotation autour de son axe car le
rotor tourne sur son axe, fournissant ainsi la rotation unidirectionnelle de propulsion
du moteur.
Dans un autre aspect,
la présente invention est dirigée vers un moteur fournissant le motif rotation
unidirectionnelle puissance comprenant : un stator généralement circulaire
présentant un axe, une extérieure et une ligne circonférentielle de démarcation
autour de la surface extérieure, la ligne de démarcation ayant un sens
prédéterminé autour de l'axe du stator et de séparer un premier côté de la
surface extérieure et un deuxième côté de la surface extérieure, dans lequel au
moins une paire d'aimants du stator est attachée à la surface externe générant
un champ magnétique première, la paire d'aimants comprenant un premier aimant
du stator ayant un pôle Nord et un pôle Sud et un deuxième aimant du stator
ayant un pôle Nord et un pôle Sud, pôle sud de l'aimant du stator premier,
étant situé sur le premier côté de la surface externe et le pôle Nord de
l'aimant du stator première étant plus proche de la ligne de démarcation, le
pôle Nord de la deuxième aimant du stator étant situé sur le deuxième côté de
la surface extérieure et le pôle sud de l'aimant de deuxième stator étant plus
proche de la ligne de démarcation, dans lequel la paire au moins un des aimants
du stator est espacée le long de la ligne de démarcation afin qu'une première
distance inter-aimant mesurée le long de la ligne de démarcation entre le pôle
Nord de l'aimant du stator première et le pôle sud de l'aimant du stator
deuxième d'une paire adjacente de la paire au moins un des aimants du stator
est généralement égale à une distance aimant inter deuxième mesurée le long de
la ligne de démarcation entre le pôle sud de la première aimant du stator et le
pôle Nord de la deuxième aimant du stator ; une armature fixée au redresseur,
l'armature ayant un axe parallèle à l'axe du stator et attaché au redresseur
pour rotation connexe ; et au moins un rotor attaché à l'induit, le rotor au
moins un étant espacés de l'induit et couplé par un axe de rotation autour d'un
axe du rotor, le rotor tourne dans un plan généralement aligné sur l'axe de
l'induit, le rotor comprenant au moins un aimant du rotor, l'aimant du rotor
générant un second magnétique champ qui interagit avec le premier champ
magnétique provoque le rotor à osciller par rotation autour de l'axe de le
rotor et à générer une force en direction de l'axe du rotor, provoquant ainsi
l'armature de tourner dans le sens pré-déterminé autour de l'axe de l'induit
pour fournir la force motrice rotation unidirectionnelle du moteur.
Dans un autre aspect,
la présente invention est dirigée vers un moteur fournissant le motif linéaire
unidirectionnel puissance comprenant : un stator linéaire ayant une section
transversale généralement incurvée et une ligne longitudinale de démarcation
perpendiculaire à la section transversale s'étendant sur environ au milieu
d'une surface du stator entre un premier bout puis une deuxième fin du stator,
le stator incluant au moins un aimant disposés entre la fin de la première et
la deuxième fin, l'aimant ayant un gisement de magnétisation à sur un angle
droit avec la ligne de démarcation et générant un champ magnétique première,
l'ampleur du premier champ magnétique étant généralement uniforme le long de la
ligne de démarcation, sauf dans un nombre prédéterminé de régions null, dans
lequel le premier champ magnétique est substantiellement zéro un rail relié au
redresseur, le rail ayant un axe longitudinal généralement parallèle à la ligne
de démarcation et une rainure hélicoïdale avec un pré-déterminé terrain en
cours d'exécution sur un pourtour du rail ; au moins un rotor ayant un axe de
rotor aligné avec l'axe du rail, le rotor étant relié au rail de sorte que le
rotor est libre de tourner autour de l'axe du rail et glisser le long du rail,
le rotor dont au moins un aimant en forme de U, ayant un côté arrière et générer
un second champ magnétique, où une partie du deuxième champ magnétique
directement adjacent à l'arrière de l'aimant en U interagit avec la première
champ magnétique pour entraîner le rotor en rotation autour de l'axe du rail ;
un ensemble de palier reliant le rotor à la rainure hélicoïdale, le palier
convertir le mouvement de rotation du rotor sur l'axe du rail en mouvement
linéaire le long du rail ; et un pontage reliant le palier d'un premier rotor à
un deuxième rotor, ainsi additionner le mouvement linéaire le long du rail de
La rotor première et la deuxième pour fournir la force motrice linéaire
unidirectionnel.
Dans encore un autre
aspect, la présente invention est dirigée vers un moteur fournissant le motif
unidirectionnel puissance comprenant : un rail ayant un axe longitudinal et au
moins une rainure hélicoïdale ayant une hauteur prédéterminée courir une
périphérie du rail ; au moins un premier stator hélicoïdaux concentriques
entourant le rail, le premier stator hélicoïdal ayant la hauteur prédéterminée
de la rainure et un axe généralement parallèle à l'axe du rail, au moins un
aimant du stator première, qui est attaché au premier redresseur hélicoïdale,
l'aimant du stator première, générant un champ magnétique première ; au moins
un rotor ayant un axe généralement aligné sur l'axe du rail, le rotor étant
relié au rail de sorte que le rotor est libre de tourner autour de l'axe du
rail et glisser le long du longeron, comprenant au moins un aimant rotor
générant un deuxième champ magnétique, le deuxième champ magnétique
interagissant avec le premier champ magnétique généré par l'aimant du stator
première pour entraîner le rotor en rotation autour de l'axe du rotor le chemin
de fer ; un ensemble de palier reliant le rotor à la rainure hélicoïdale autour
de la périphérie du rail, le roulement en convertissant le mouvement de
rotation du rotor sur le rail en unidirectionnel mouvement linéaire le long du
rail.
Un autre aspect de la
présente invention est dirigé vers un moteur fournissant le motif unidirectionnel
force comprenant : un rail ayant un axe longitudinal et une rainure hélicoïdale
courir le rail, la rainure ayant une hauteur prédéterminée ; au moins un stator
hélicoïdale première comprenant une pluralité de discontinu espacés apart
premières côtes, chaque première côte entourant partiellement le rail à une
distance généralement uniforme, le premier stator hélicoïdal ayant la hauteur
prédéterminée de la rainure et un axe généralement alignée sur le rail, au
moins un aimant du stator première, qui est attaché à chaque nervure latérale
du rail, chaque premier aimant du stator générant un champ magnétique première
; au moins un rotor ayant un axe généralement aligné sur l'axe du rail, le
rotor étant relié au rail de sorte que le rotor est libre en rotation autour de
l'axe du rail et de glisser le long du rail, le rotor comprenant au moins un
aimant rotor générant un deuxième champ magnétique, le deuxième champ
magnétique interagissant avec le premier champ magnétique généré par l'aimant
du stator première pour entraîner le rotor en rotation autour de l'axe Rail ;
et un ensemble de palier reliant le rotor à la rainure hélicoïdale autour du
rail, le palier convertir le mouvement de rotation du rotor sur le rail à
mouvement linéaire le long du rail.
La présente invention
est de plus ordonnée à un moteur fournissant le motif unidirectionnel puissance
comprenant : un rail ayant un axe longitudinal et un groove généralement
sinusoïdal courir une périphérie du rail, la rainure sinusoïdale ayant une
période prédéterminée ; au moins un stator ayant une section transversale
généralement incurvée et une ligne longitudinale de démarcation perpendiculaire
à la coupe transversale, située à environ un point médian de la surface du
stator, la surface du stator étant disposé généralement équidistant d'et
parallèle à l'axe du rail ; aimant du stator au moins un attaché à la surface
du stator générant un premier champ magnétique, l'aimant du stator ayant une
magnétisation qui est déplacée à l'onde sinusoïdale de la ligne de démarcation,
la sinusoïde ayant une période prédéterminée et une amplitude maximale
prédéterminée et divisé en une pluralité d'une alternance de secteurs de
premières et deuxième, avec la limite entre les secteurs de premières et
deuxième alternance se produisant à l'amplitude maximale de la sinusoïde, la
direction de l'aimantation de l'aimant du stator étant opposé à la direction
dans le premier et le deuxième segment ; au moins un rotor ayant un axe aligné
avec l'axe du rail, le rotor étant relié au rail de sorte que le rotor est
libre de tourner autour de l'axe du rail et glisser le long du rail, le rotor
dont au moins un aimant en forme de U, ayant un côté arrière et générer un
second champ magnétique, l'aimant en forme de U, étant placé sur le rotor de
sorte que la face arrière de l'aimant en forme de U est pertinente pour le
premier et les deuxième segments du stator car le rotor tourne autour de l'axe
du rotor, dans lequel une interaction d'une partie du deuxième champ magnétique
directement adjacent à l'arrière de l'aimant en forme de U avec le premier
champ magnétique entraîne le rotor à rotation oscillent autour de l'axe du rail
; un ensemble de palier reliant le rotor à la rainure sinusoïdale autour du
rail, le roulement en convertissant le mouvement oscillatoire du rotor sur le
rail en unidirectionnel mouvement linéaire le long du rail.
La présente invention
vise également un moteur fournissant le motif unidirectionnel puissance
comprenant : un rail ayant un axe longitudinal et une rainure hélicoïdale
courir une périphérie du rail, la rainure hélicoïdale ayant une hauteur
prédéterminée ; au moins un stator un général ayant une ligne longitudinale de
démarcation, située à environ un point médian de la surface du stator, la
surface du stator étant disposé généralement équidistant d'et parallèle à l'axe
du rail ; aimant du stator au moins un attaché à la surface du stator, l'aimant
du stator ayant un gisement de magnétisation qui tourne autour d'un axe
magnétique parallèle à la ligne de démarcation avec une hauteur prédéterminée,
ainsi générer un premier champ magnétique ayant une magnitude sensiblement
uniforme le long de l'axe magnétique et tourne autour de l'axe magnétique avec
la hauteur prédéterminée de la rotation des aimants du stator ; au moins un
rotor ayant un axe aligné avec l'axe du rail, le rotor étant relié au rail de
sorte que le rotor est libre de tourner autour de l'axe du rail et glisser le
long du rail, le rotor dont au moins un aimant en forme de U, générant un
deuxième champ magnétique, l'aimant en forme de U, positionné sur le rotor afin
qu'une partie du deuxième champ magnétique directement adjacent à l'arrière de
l'aimant en U interagit avec le premier champ magnétique de l'aimant du stator
pour entraîner le rotor en rotation autour de son axe ; et un ensemble de
palier reliant le rotor à la rainure hélicoïdale, le palier convertir le
mouvement de rotation du rotor sur le rail unidirectionnel mouvement linéaire
le long du rail.
BRÈVE
DESCRIPTION DES POINTS DE VUE PLUSIEURS DES DESSINS
Le résumé qui précède,
ainsi que la description détaillée suivante des modes de réalisation préférés
de l'invention, est mieux comprise lu conjointement avec les dessins de joint
en annexe. Afin d'illustrer l'invention, on montre dans les modes de réalisation
de dessins qui sont actuellement privilégiées. Il devrait être entendu,
toutefois, que l'invention n'est pas limitée à des modalités précises et les
instruments montrés. Dans les
dessins :

Fig.1A est une schéma dessin en perspective d'un
premier mode de réalisation préféré d'un moteur fournissant la puissance
motrice unidirectionnelle ;
Fig.1B est une schéma
dessin en perspective d'un deuxième mode de réalisation préféré du moteur ;

Fig.1C est une schéma dessin en perspective d'un
troisième mode de réalisation préféré du moteur ;
Fig.2 une vue en
plan schématique d'un rotor est composée de trois paires d'aimants en forme de
U ;
Fig.3 est une vue en
plan schématique du stator ayant une pluralité d'aimants du stator, générant un
champ magnétique uniforme, sauf dans la seule région nulle, aménagé plat pour
faciliter l'illustration ;

Fig.4 une vue de
plan schématique d'un stator ayant une pluralité d'aimants du stator qui
tournent autour d'un axe magnétique, aménagé plat pour faciliter l'illustration
;
Fig.5 une vue de
plan schématique d'un stator ayant une pluralité d'aimants du stator qui sont
déplacés sinusoïdalement partir d'une ligne de démarcation, aménagé plat pour
faciliter l'illustration ;

Fig.6 est une vue en perspective schématique d'un
quatrième grâce à une septième réalisation préférée du moteur ;
Fig.7A est une vue en plan schématique d'un rotor utilisé
dans la quatrième réalisation préférée et occupant un huitième préféré
incarnation du moteur ;
Fig.7B est une vue en plan schématique d'un rotor utilisé
dans une cinquième réalisation préférée et un neuvième préféré incarnation du
moteur ;
Fig.7C est une vue en plan schématique d'un rotor utilisé
dans un mode de réalisation préféré sixième et un dixième préféré incarnation
du moteur ;
Fig.7D est une vue en plan schématique d'un rotor utilisé
dans la septième réalisation préférée et dans un onzième préféré incarnation du
moteur ;
Fig.8A est qu'une vue en plan schématique d'un stator
utilisé dans le quatrième, cinquième, huitième et neuvième préférentielles du
moteur ;
Fig.8B est une vue en coupe schématique du stator
montré Fig.8A prises le long de la
ligne 8B -- 8B ;
Fig.8C est une vue en
plan schématique d'un stator utilisé dans la sixième et les dixième
préférentielles du moteur ;
Fig.8D une vue
schématique altitudinale du stator montré dans Fig.8C prises le long de la ligne 8D - 8D est montrée avec le rotor montré en Fig.7C ;
Fig.8E est une vue altitudinal schématique d'un
stator alternatif montré avec le rotor montré dans Fig.7D ;
Fig.9 est une vue en perspective schématique de la
huitième à travers un mode de réalisation préféré onzième du moteur ;
Fig.10 est une vue en perspective schématique
d'une douzième réalisation préférée du moteur ;
Fig.11A est une vue en
plan d'un ensemble rotor utilisé dans les 8 aux onzième préférentielles ;

Fig.11B est une vue en plan d'un ensemble rotor utilisé
dans le douzième à travers un mode de réalisation préféré seizième ;

Fig.12 une vue de l'ensemble rotor de bout
d'altitudinal apparaît dans Fig.11B, autre, y compris un rail de montage post ;

Fig.13 une vue altitudinal d'une treizième
réalisation préférée du moteur ;
Fig.14 est une vue en plan d'une configuration
rotatif de la treizième réalisation préférée ;
Fig.15A une vue altitudinal d'une portion d'un mode de
réalisation préféré quatorzième emploie des côtes apart espacés ;

Fig.15B une vue
altitudinal de fin de la quatorzième incarnation est montrée en Fig.15A ;
Fig.16 est une vue en
haut de la page plan d'une partie de la quinzième réalisation préférée du
moteur ;
Fig.17 est une vue de
l'extrémité altitudinal de la quinzième réalisation préférée, illustrée à la Fig.16 ;
Fig.18 est une vue en
haut de la page plan d'une partie de la seizième réalisation préférée du moteur
; et
Fig.19 est une vue de
l'extrémité altitudinal de la seizième réalisation préférée du moteur illustré
à la Fig.18.
DESCRIPTION
DÉTAILLÉE DE L'INVENTION
Il sera apprécié par
les personnes du métier qui pourraient être modifiées aux configurations
décrites ci-dessus sans s'écarter le concept inventif général celle-ci. Il est
entendu, alors que cette invention n'est pas limitée à des modes particuliers
de réalisation divulgués, mais il est destiné à couvrir les modifications dans
l'esprit et la portée de la présente invention telle que définie par les
revendications annexées. Il faut aussi comprendre que les articles " a
" ou " les " utilisés dans les revendications pour définir un
élément peuvent faire référence à un élément unique ou à une pluralité
d'éléments sans limitation quant au nombre d'éléments.
Les tentatives
antérieures pour construire un moteur à aimant permanent travail ont rencontré
des difficultés en raison des caractéristiques attractives et répulsives
simultanées d'un aimant permanent. Un principe a été découvert où, en se
livrant à un champ magnétique à l'arrière d'un ou plusieurs aimants en forme de
U monté sur un rotor avec un deuxième champ magnétique stationnaire, un couple
est créé qui fait tourner le rotor sur un axe de rotation du rotor. En outre,
par correctement mise en forme le deuxième champ magnétique, le rotor peut être
causé à traduire également en direction de l'axe du rotor.
Par conséquent, du
principe susmentionné et se référant aux la Fig.7A, un aspect de la présente invention vise à un rotor 12 pour une utilisation dans un moteur
et qui fournit de propulsion par une rotation du rotor 12 autour d'un axe de rotor 16
ainsi que par une traduction du rotor 12 dans le sens de l'axe rotor 16.
Dans un aspect, le rotor 12
comprend un première aimant 20 en
forme de U dans lequel l'aimant en U génère un champ magnétique première. Une
rotation du rotor 12 sur l'axe rotor
16 est provoquée par une interaction
d'une partie du premier champ magnétique directement adjacent à une partie
arrière 26 de l'aimant en forme de U
20 avec un second champ magnétique
fixe. Une traduction du rotor 12 dans la direction de l'axe du rotor 16 est provoquée par une interaction
entre le premier champ magnétique à proximité d'un pôle nord 23 et un pôle sud 25 de l'aimant en forme de U 20
avec le second champ magnétique stationnaire. Comme cela sera apprécié par
l'homme de l'art, la conception du rotor 12
n'est pas limitée à un seul aimant en forme de U 12 Une pluralité d'aimants en forme de U 20, disposée autour d'une périphérie du rotor 12 est à l'intérieur de l'esprit et la portée de l'invention.
Un autre aspect de la
présente invention, représenté sur la Fig.7B
comprend un rotor 12 comprenant un
premier aimant en forme de U ayant un pôle nord et un pôle sud à générer un
premier champ magnétique; un second aimant en forme de U 24 ayant un pôle nord et un pôle sud, le pôle sud du second aimant
en forme de U 24 en butée contre le
pôle nord du premier aimant en forme de U 20;
et un troisième aimant en forme de U 22
ayant un pôle nord et un pôle sud au pôle nord de la troisième aimant en forme
de U 22 en butée contre le pôle sud
du premier aimant en forme de U 20
Une partie du premier champ magnétique généré par le premier aimant en forme de
U 20 directement adjacente à
l'arrière 26 du premier aimant en
forme de U 20 interagit avec un
quatrième champ magnétique stationnaire pour entraîner le rotor 12 en rotation. Un deuxième champ
magnétique généré par le pôle nord du second aimant en forme de U 24 et un troisième champ magnétique
généré par le pôle sud du troisième aimant en forme de U 22 interagissent respectivement avec le quatrième champ magnétique
pour entraîner le rotor 12 à
traduire en la direction de l'axe du rotor 16.
Un autre aspect de la
présente invention, représenté sur la Fig.7C,
comprend un premier aimant en forme de U 20
ayant un pôle nord et un pôle sud à générer un premier champ magnétique. Le pôle nord et le pôle sud de l'aimant en
forme de U 20 sont généralement
alignés avec un propulseur axe 34
qui se situe dans le plan du rotor 12
et coupe l'axe de rotor 16 Un
premier propulseur aimant 36 se
trouve à proximité de et espacée de le pôle nord du premier aimant en forme de
U avec une direction d'aimantation étant généralement aligné avec l'axe de
l'aimant d'éjecteur 34 un second
propulseur aimant 38 est situé à
proximité et à distance du pôle sud du premier aimant en forme de U 20 avec un direction d'aimantation
étant également généralement aligné avec l'axe de l'aimant d'éjecteur 34 une partie du premier champ
magnétique généré par le premier aimant en forme de U 20 directement adjacentes à la face arrière 26 du premier aimant en forme de U 20 interagit avec un quatrième stationnaire champ magnétique pour
provoquer le rotor 12 en rotation.
Un deuxième champ magnétique généré à la fois par le pôle nord et le pôle sud
du premier aimant de propulseur 36
et un troisième champ magnétique généré à la fois par le pôle nord et le pôle
sud du second aimant de propulseur 38 interagir respectivement avec un champ
magnétique cinquième à provoquer le rotor 12
de la traduction dans la direction de l'axe du rotor 16 dans un aspect supplémentaire du rotor 12, comme représenté sur la Fig.7D,
un barreau magnétique 43 peut être
remplacé par l'aimant en forme de U 20
et le quatrième champ magnétique est formé par un ou plusieurs aimants en forme
de U, où le barreau aimanté 43
interagit avec une partie de la quatrième champ magnétique stationnaire à côté
de l'arrière d'un aimant en forme de U.
Comme cela sera
apprécié par l'homme de l'art, les polarités des aimants représentés sur les
figures. 7A, 7B, 7C et 7D
peuvent être inversés et être toujours dans l'esprit et la portée de
l'invention
En se référant maintenant à la Fig.1A, la Fig.2 et la Fig.3 on a
représenté un premier mode de réalisation préféré d'un moteur 10 à l'aide du rotor 12 et en fournissant la force motrice
unidirectionnel de rotation. Le premier mode
de réalisation préféré comprend un stator 50
de forme générale circulaire ayant un axe de stator 72 et une surface périphérique 64
monté sur une base 18; un induit 70, dont l'axe de rotation de
l'armature 58 coïncide avec l'axe du
stator 72, fixé au stator 50 par un axe d'induit 57 pour une rotation autour de l'axe de
rotation de l'induit 58; et cinq
rotors 12 (dont un seul est
représenté pour plus de clarté), les rotors 12 étant espacées à des intervalles d'environ 72 degrés autour de l'armature 70. Chaque rotor 12 est espacée de l'armature par une armature d'entretoise 71 et fixés à la jambe de force induit 71 par un axe, de rotation autour d'un
axe 16 du rotor 12 dans un plan généralement aligné avec l'axe d'induit de rotation
58 le moteur 10 comprend en outre un ensemble de liaison de la conduite 53 de liaison de chaque rotor 12 et le stator 50 en même temps, la tringlerie 53 pousser l'armature 70
pour pivoter autour de l'axe d'induit de rotation 58 que chaque rotor 12
tourne autour de son axe de rotor respectif 16. Comme cela sera apprécié
par l'homme de l'art le nombre de rotors 12
n'est pas limité à cinq rotors 12
décrits dans le premier mode de réalisation.
N'importe quel nombre de rotors de l'un à 12 autant qu'il y aurait un espace pour le montage sur l'armature 70 est dans l'esprit et la portée de
l'invention.
De préférence, la
surface 64 du stator 50 est courbe, ayant une courbure
conforme à l'arc de rotors 12. Toutefois, il sera apprécié par l'homme de
l'art que la surface 64 n'a pas besoin
d'être courbé mais pourrait être plane et encore être à l'intérieur de l'esprit
et de la portée de l'invention. Comme
cela sera apprécié par l'homme de l'art le stator 50 est simplement conçu comme une structure de support fixe pour
aimants du stator et, de ce fait, la forme du stator 50 n'est pas destinée à être la commande de la taille et de la
forme de la lame d'air entre les aimants fixés sur le stator 50 et des aimants fixés sur les rotors 12.
De préférence, le
stator 50 est réalisée en un matériau
(ou une combinaison de matières) ayant une susceptibilité magnétique de moins
de 10-3, c'est à dire un matériau
paramagnétique ou l'affichage des propriétés diamagnétiques. Par exemple, le
stator 50 pourrait être faite d'un
métal non-magnétique tel que l'aluminium ou le laiton. En outre, le rotor 12 pourrait être constitué d'un matériau naturel comme le bois, le
verre, un matériau polymère ou une combinaison de n'importe lequel des
matériaux mentionnés ci-dessus au sein de l'esprit et du cadre de l'invention.
En outre, il doit être entendu que les matériaux mentionnés ci-dessus sont
préférées pour les stators et les autres parties du moteur 10 qui pourraient perturber sensiblement l'interaction magnétique
entre le stator et le rotor de l'ensemble des modes de réalisation préférés
décrits 10 du moteur.
Dans le premier mode de
réalisation préféré, la surface 64
du stator 50 comporte une ligne
circonférentielle de délimitation 49
vers un point médian de la surface 64
formée par l'intersection avec la surface 64
d'un plan perpendiculaire à l'axe de rotation de l'induit 58. Comme le montre la Fig.3, le stator 50 comporte une pluralité de barreaux aimantés 68 fixés à la surface extérieure 64 le long de la ligne de démarcation 49, sauf dans une région de 78
null unique où l'amplitude du premier champ magnétique est sensiblement réduite
. Les barreaux aimantés 68 ont une
direction d'aimantation à un angle droit à la ligne de démarcation 49, créant ainsi un premier champ
magnétique au voisinage de la surface extérieure 64, l'amplitude et la direction de ce qui est sensiblement uniforme
le long de la ligne périphérique de démarcation 49 autour de l'axe 58 du
stator 50, sauf dans la région null 78.
Comme cela sera apprécié par l'homme de l'art, l'axe du stator 72 ne doit pas être confondu avec l'axe
de rotation de l'induit 58 en
conséquence, un stator 50 disposé
autour de l'armature axe 58 à
l'endroit où le stator axe 72 est
parallèle à l'axe d'induit 58 et la
surface 64 du stator 50 fait face à la périphérie des rotors
12, fournissant ainsi de
l'interaction entre le premier champ magnétique et le second champ magnétique
autour de l'armature axe 58, est
dans l'esprit et la portée de l'invention.
De préférence, comme
représenté en outre en Fig.3, les
barreaux magnétiques sont fixés à la surface 64 du stator 50 de sorte
que la direction de magnétisation des aimants de la barre 68 sont environ perpendiculaire à une ligne radiale du rotor 12.
Cependant, la barre des aimants 68
peuvent également être fixés à la surface 64
du stator de sorte que la direction de magnétisation des aimants de la barre 68 est aligné avec une ligne radiale du
rotor 12 les barreaux magnétiques 68 sont de préférence en butée de
manière à former le substantiellement uniforme d'abord champ magnétique. Cependant, il n'est pas nécessaire que les
aimants de la barre 68 à venir en
butée contre une autre. En outre, il
n'est pas nécessaire d'utiliser une pluralité de barreaux magnétiques 68 pour former le premier champ
magnétique. Un aimant unique pour produire un premier champ magnétique uniforme
dans la région dans laquelle le premier champ magnétique interagit avec le
champ magnétique de deuxième rotors 12
donnerait le premier champ magnétique requis.
En outre, le nombre de régions nulles 78 peut être plus d'un, en fonction de la vitesse désirée du
moteur, comme cela est expliqué ci-dessous.
De préférence, les
aimants de stator 68 sont des
aimants permanents constitués d'un matériau en néodyme-fer-bore. Cependant,
comme cela sera apprécié par l'homme de l'art, n'importe quel type de matériau
d'aimant permanent présentant des propriétés ferromagnétiques peut être utilisé
pour les aimants de stator 68. Par exemple, les aimants du stator 68 faits de samarium cobalt, le ferrite
de baryum ou AlNiCo sont dans l'esprit et la portée de l'invention. Il doit être entendu que ces matériaux pour
aimants permanents ou leurs équivalents sont préférés pour les aimants de
stator et les aimants de rotor de l'ensemble des modes de réalisation préférés
décrits du moteur 10 En outre,
tandis que l'utilisation d'aimants permanents est préférée, l'utilisation
d'électro-des aimants pour une partie ou la totalité des aimants est dans
l'esprit et la portée de l'invention.
Comme discuté
ci-dessus, le stator 50 peut
comprendre un nombre prédéterminé de régions nulles sur la surface 78 du stator 64. Dans le premier mode de
réalisation préféré, la région de nul unique 78 est formé par un écran en un matériau ferromagnétique, tel que
le fer, placée adjacente à la surface 64. Toutefois, comme l'homme de l'art appréciera,
la région null 78 peut également
être formé par une absence des barreaux magnétiques 68 de la région en coïncidence avec la région null 78 la région de 78 null magnitude du champ magnétique sensiblement réduite peut
également être formée par un champ magnétique auxiliaire appropriée générée par
un ou plusieurs aimants permanents ou par un ou plusieurs électro-aimants
alimentés par un courant électrique agencé de telle sorte que le champ
magnétique auxiliaire annule sensiblement le premier champ magnétique dans la
région null 78 dans le cas des
électro-aimants, le courant électrique peut être coupée en synchronisme avec la
rotation des rotors 12 en passant
par la région null 78, afin
d'économiser l'énergie. De préférence,
le premier champ magnétique est réduite à dix pour cent ou moins de la force
magnétique à l'extérieur de la zone nulle.
Cependant, le moteur 10 fonctionnera avec seulement une
réduction de cinquante pour cent. Par
conséquent, un moteur 10 ayant une réduction
substantielle du premier champ magnétique de cinquante pour cent ou moins est à
l'intérieur de l'esprit et de la portée de l'invention.
Comme le montre la Fig.2, le rotor 12 du premier mode de réalisation préféré comprend trois paires 32, 32', 32” de aboutées des aimants 20 en forme de U espacées à des
intervalles d'environ 120 degrés autour de la périphérie du rotor 12.
De préférence, des aimants en forme de U 20 ayant des propriétés magnétiques sensiblement identiques et sont
agencés pour avoir des pôles opposés de la butée de l'autre. Les paires 32, 32', 32” de aboutés aimants en
forme de U 20 sont positionnées de
telle sorte que le pôle nord et le pôle sud de chaque aimant en forme de U 20 face vers l'axe du rotor 16, et la face arrière 26 de chaque aimant en forme de U 20, en face au nord et le pôle sud de
l'aimant en forme de U 20, fait face
à partir de l'axe du rotor 16 vers
la surface 64 du stator 50.
Les paires 32, 32', 32” des
aimants en forme de U 20 sont situés
sur le rotor 12 de sorte qu'une
partie de la deuxième champ magnétique à proximité immédiate de l'arrière 26 de chaque aimant en forme de U 20 coopère avec un premier champ
magnétique stationnaire pour amener le rotor à tourner 12 autour de son axe de rotor respectif 16 l'homme du métier comprendra qu'il n'est pas nécessaire d'avoir
exactement trois paires 32, 32', 32”
d'aimants en forme de U 20 sur le
rotor 12, par exemple, le nombre de
U des aimants en forme de U 20 (ou
groupes d'aimants en butée en forme de U) espacés autour de la périphérie du
rotor 12 peut aller d'un simple
aimant unique en forme de U 20, à un
certain nombre d'aimants limité que par l'espace physique autour de la
périphérie du rotor 12 en outre, le
nombre d'aimants en butée en forme de U 20
dans chaque groupe d'aimants 32
n'est pas limitée aux deux aimants, mais peuvent également varier de 1 à un certain nombre d'aimants limité
que par l'espace physique sur le pourtour de le rotor 12.
De préférence, le rotor
12 est constitué d'un matériau (ou
une combinaison de matières) ayant une susceptibilité magnétique inférieure à
3-10. Par conséquent, le rotor peut être
faite de l'un des mêmes matériaux utilisés pour fabriquer le stator, comme par
exemple, un métal non-magnétique, le bois, le verre, un polymère ou une
combinaison quelconque de ce qui précède comme représenté sur la Fig.1A , le rotor 12 est de préférence en forme avec l'arrière 26 des aimants de rotor en forme de U 20 est disposé sur la périphérie du rotor 12 disque de manière à ce que les aimants en forme de U 20 passe à proximité de la ligne
circonférentielle de démarcation 49
sur la surface extérieure 64 du
stator 50 lorsque le rotor 12 tourne. Cependant, comme il apparaîtra clairement à
l'homme de l'art, la structure du rotor 12
n'a pas besoin d'être mis en forme de disque.
Le rotor 12 peut être une
structure de forme quelconque susceptible de tourner autour de l'axe du rotor 16 et capable de supporter les aimants
en forme de U 20 de telle sorte que,
lorsque le rotor 12 tourne, les
aimants en forme de U 20 sont en
proximité étroite avec la partie extérieure surface 64 du stator 50, par
exemple, un rotor 12 constitué
d'entretoises reliées à un palier central, où chaque entretoise possède un ou
plusieurs aimants en forme de U 20,
est à l'intérieur de l'esprit et de la portée de l'invention.
Dans le premier mode de
réalisation préféré, la liaison 53
reliant chaque rotor 12 et le stator
50 comporte un bourrelet chaîne
d'entraînement 60 qui engrène avec
une roue dentée du stator 61 sur le stator 50
et un rotor pignon excentrique 59
sur chaque rotor 12, de sorte que,
comme chaque rotor 12 tourne autour
de son axe respectif rotor 16,
l'armature 70 est contraint de
tourner autour de l'axe de rotation de l'armature 58, le rotor excentrique pignon 59 entraîne la vitesse angulaire instantanée du rotor 12 autour de l'axe du rotor 16 pour augmenter au-dessus de la
moyenne angulaire la vitesse du rotor 12,
comme chaque paire 32, 32', 32”
d'aimants en forme de U 20 passe à
travers la région null 78. Comme cela sera apprécié par l'homme de
l'art, la roue dentée de rotor 59
peut être circulaire et le stator 61
pignon excentrique et encore provoquer la vitesse angulaire du rotor 12 d'augmenter. En outre, la chaîne à billes 60 en
combinaison avec la roue dentée de stator 61 et le rotor excentrique pignon 59
ne sont pas les seuls moyens de connexion de chaque rotor 12 du stator 50, par
exemple, la chaîne à billes 60 peut
aussi être une courroie. En outre, la
liaison 53 peut comprendre un arbre
d'entraînement entre chaque rotor 12
et le stator 50, l'arbre
d'entraînement ayant un pignon conique fixé à chaque extrémité de
l'accouplement de l'arbre avec un engrenage conique sur le rotor 12 et le stator 50. Une boîte de vitesse
automatique mécanisme de changement de vitesse devrait changer de vitesse en
tant que chaque paire en forme de U aimant 32,
32', 32” 'introduction dans les régions nulles 78 pour augmenter la vitesse angulaire instantanée du rotor 12 et la paire 32, 32', 32” d'aimants de rotor 20 passé à travers la région null 78 en variante, la liaison 53
peut comprendre un système de transmission employant des engrenages
elliptiques.
Bien qu'il soit
préférable que la vitesse angulaire instantanée du rotor 12 ci-dessus pour augmenter la vitesse angulaire moyenne du rotor 12, comme chaque paire d'aimants en
forme de U 20 passe à travers la
région 78 nulle, il n'est pas
nécessaire de prévoir une augmentation de la vitesse angulaire du rotor 12 pour fournir la force motrice depuis
le moteur 10.
De préférence, les
diamètres de la roue dentée du rotor 59
et du stator pignon 61 sont choisis
de sorte que l'arrière 26 de chaque
aimant en forme de U 20 et passe à
travers une seule région nul 78 pour
chaque rotation complète du rotor 12
autour de l'axe de rotor respectif 16
lorsque l'armature 70 pivote autour
de l'axe de rotation de l'induit 58
en conséquence, la vitesse de l'induit 70
de rotation est liée à la vitesse du rotor 12
par l'expression de révolution :
Sa = (Nr /
Ns) x Sr ............. (1)
où:
Sa est la vitesse
angulaire de l'induit 70 (RPM) ;
Nr est le nombre
d'aimants 20 (ou groupes d'aimants
en butée en forme de U 32) sur un
rotor 12 en forme de U ;
Ns est le nombre
de régions nulles 12 sur le stator 50 ; et
Sr est la vitesse
angulaire du rotor 12 (RPM).
Le moment de la
rotation du rotor 12 autour de son
rotor respectif axe 16 et l'armature
70 autour de l'axe d'induit de
rotation 58 est telle que chaque
aimant en forme de U 20 (ou en forme
de U paire d'aimants 32, 32', 32”)
sur chaque rotor 12 entre dans une
zone nulle en un point 78, où
l'interaction magnétique entre le premier champ magnétique et le second champ
magnétique est sensiblement réduit, ce qui permet une commutation du second
champ magnétique. Comme chaque rotor 12 continue à tourner autour de l'axe du
rotor 16 et l'armature 70 pivote autour de l'axe d'induit de
rotation 58, l'aimant en forme de U 20 des traces d'un chemin d'accès
oblique à travers la région null 78. Comme l'aimant en forme de U se dégage de
l'null région 78, l'aimant en forme
de U 20 rencontre d'abord le solide
de champ magnétique, qui sollicite l'aimant en forme de U 20 pour continuer la rotation du rotor 12 autour de l'axe du rotor 16.
Comme décrit
précédemment, le premier mode de réalisation préféré du moteur 10 comprend une région unique de 78 nulle et cinq rotors 12, chaque rotor 12, ayant trois paires 32,
32', 32” de aboutées des aimants en forme de U 20. De préférence, les
rotors 12 sont uniformément espacées
autour de l'axe de rotation de l'induit 58
et les paires 32, 32', 32” d'aimants
en forme de U 20 sont uniformément
espacées autour de la périphérie de chaque rotor respectif 12 en outre, les paires 32,
32', 32” d'aimants en forme de U 20
de chaque rotor 12 sont
progressivement par rapport à l'autre par un cinquième d'un tour du rotor 12 (à savoir l'inverse du nombre de
rotors), de sorte que les paires 32,
32', 32” d'aimants en forme de U 20
de tous les rotors 12 entrer la
région null à intervalles sensiblement uniformes pour fournir une interaction
magnétique plus ou moins continue entre le premier champ magnétique du stator 50 et le second champ magnétique des
rotors 12. Comme sera apprécié par l'homme de l'art, la
puissance motrice fournie par le moteur est proportionnel au nombre de rotors 12 et le nombre d'aimants 20 de chaque rotor 12, ainsi que la résistance du rotor 12 aimants 20 et le
stator 50 aimants 68 en conséquence, le nombre de rotors 12 et le nombre de paires 32, 32', 32” d'aimants en forme de U 20 ne sont pas limités à cinq rotors 12 et trois paires d'aimants en forme
de U 32. de même, le nombre de
nulles régions 78 ne se limite pas à
une. Le nombre d'aimants en forme de U 20 et le nombre de régions nuls 78 ne sont limitées que par le respect
de la règle établie par l'équation (1).
En se référant maintenant à la Fig.1B, la Fig.2 et la Fig.4 on a
représenté un second mode de réalisation préféré d'un moteur unidirectionnel 10 fournissant la force motrice de
rotation. Le second mode de réalisation
préféré comprend un stator de forme générale circulaire 50’ comportant un stator 72
avec des aimants axe 68' fixée à une
surface 64 du stator 50’ ; un induit 70 fixé au stator 50’ par
un axe d'induit 57 pour une rotation
autour d'un axe de rotation de l'armature 58
coïncide avec l'axe du stator 72 ; et
cinq rotors 12 (pour plus de clarté,
dont un seul est représenté) comportant trois paires 32, 32', 32” de aboutés aimants en forme de U 20, les rotors 12 étant
espacées à des intervalles d'environ 72 degrés autour de l'armature 70.
Chaque rotor 12 est espacée
de l'armature par une entretoise 71
et fixée à l'entretoise 71 par un
axe de rotation dans le plan de l'axe d'armature de rotation 58 autour d'un rotor 12 axe de rotation 16 du moteur 10 comprend
en outre une liaison d'entraînement 55
reliant chaque rotor 12 et le stator
50 en même temps pour amener
l'armature 70 pour pivoter autour de
l'axe de rotation de l'armature 58
que chaque rotor 12 tourne autour de
son axe respectif rotor 16.
Le second mode de
réalisation préféré, est identique à la première forme de réalisation préférée
à l'exception de deux différences. Tout d'abord, au lieu du premier champ
magnétique étant uniforme dans les deux grandeur et la direction
circonférentielle le long de la ligne de démarcation 49 (sauf dans une ou plusieurs régions 78 nulles comme dans le premier mode de réalisation préféré), la
direction du premier champ magnétique tournant autour d'un champ magnétique axe
parallèle à la ligne de démarcation 49
circonférentielle avec une périodicité prédéterminée le long de la ligne de
démarcation 49 de préférence, le
premier champ magnétique est formé d'un ou plusieurs aimants de stator 68' fixée à la surface extérieure 64 du stator 50’, chaque aimant 68'
ayant une direction d'aimantation qui amène le premier champ magnétique à
tourner autour de l'axe magnétique. Dans
le second mode de réalisation préféré, comme illustré sur la Fig.4, les aimants de stator sont des
aimants 68' de la barre de taille
égale, fixés au stator 50’ de sorte
que les barreaux magnétiques 68' en
spirale sur le stator 50’ avec la
périodicité prédéterminée. Cependant, comme cela sera évident pour l'homme de
l'art, le premier champ magnétique n'a pas besoin d'être formée par des
barreaux magnétiques, mais pourrait être formé à partir d'un seul aimant (ou groupes
d'aimants) de façon que la direction d'aimantation de la seule aimant tourne
autour d'l'axe magnétique.
La deuxième différence
entre le premier mode de réalisation préféré et le deuxième mode de réalisation
préféré est que la liaison 55 de la
seconde forme de réalisation préférée ne comprend pas un composant pour
augmenter la vitesse angulaire du rotor 12
au-dessus de la vitesse moyenne du rotor 12. Par conséquent, dans la second mode de
réalisation préféré, un pignon de rotor circulaire 63 est utilisé à la place de la douille de rotor excentrique 59, fournissant ainsi une vitesse
constante de rotation du rotor 12
autour de l'axe du rotor 16 que
l'armature 70 tourne autour du
stator 50’.
Comme cela sera clair
pour l'homme de l'art, la rotation de la direction du premier champ magnétique
autour de la ligne périphérique de démarcation 49 commute le second champ magnétique, en surmontant la nécessité
pour les régions nulles 78. A tous autres égards, le fonctionnement de la
deuxième forme de réalisation est le même que celui de la première
réalisation. Autrement dit, le taux de
chaque rotor 12 de rotation est liée
à la vitesse de rotation de l'armature 70
par l'équation (1), où le paramètre Ns
est le nombre de tours autour de la ligne de démarcation 49 du premier champ magnétique le long de la ligne de démarcation 49 dans le second mode de réalisation
préféré, comme illustré sur la Fig.4,
le nombre de rotations du premier champ magnétique est une. Par conséquent, étant donné qu'il existe
trois paires 32, 32', 32” d'aimants
en forme de U 20, chacun des cinq
rotors 12 fait un tiers de tour pour
chaque tour complet de l'armature 70
autour de l'axe d'induit 58. Cependant, en tant que il sera apprécié par
l'homme de l'art, le moteur 10
pourrait être conçu pour le premier champ magnétique à avoir un nombre
quelconque de périodes entières de rotation autour de l'armature axe 58 à condition que la vitesse des
rotors 12 de rotation a été ajustée
pour se conformer à l'équation (1).
En se référant maintenant à la Fig.1C, la Fig.2 et la Fig.5 on a
représenté un troisième mode de réalisation préféré d'un moteur unidirectionnel
10 fournissant la force motrice de
rotation. Le troisième mode de
réalisation préféré comprend un stator de forme générale circulaire 50'' monté sur une base 18 et ayant un axe 72, avec des aimants 68''
fixés à la surface 64 du stator 50'', un induit 70 fixé au stator 50''
par un axe de rotation 57 autour
d'un axe de rotation de l'armature 58
coïncide avec l'axe du stator 12, et
cinq rotors 12 (pour la clarté, dont
un seul est représenté) comportant trois paires 32, 32', 32” de U en butée des aimants en forme 20, les rotors 12 étant espacées à des intervalles d'environ 72 degrés autour de l'armature 70
Chaque rotor 12 est espacée de
l'armature par une armature d'entretoise 71
et fixés à la jambe de force induit 71
par un axe de rotation autour d'un axe 16
de le rotor 12 dans un plan
généralement aligné avec l'axe de l'armature 58 autour d'un axe 16 du
rotor 12, le moteur 10 comprend en outre une liaison de
conduite de liaison 62 de chaque
rotor 12 et le stator 50 en même temps pour amener l'armature
70 pour pivoter autour de l'induit
axe de rotation 58 de chaque rotor 12 oscille autour de son rotor
respectif axe 16.
Le troisième mode de
réalisation préféré, est identique à la première forme de réalisation préférée
à l'exception des trois différences. Tout d'abord, au lieu du premier champ
magnétique étant uniforme dans les deux grandeur et la direction autour de la
ligne périphérique de délimitation 49
(sauf dans la zone nulle 78), le
premier champ magnétique est déplacée par un motif sinusoïdal ayant une
amplitude maximale prédéterminée et une période pré-déterminée le long de la
ligne périphérique de démarcation 49,
avec la direction du premier champ magnétique alternatif dans des directions
opposées le long de la ligne de démarcation 49 entre chaque amplitude de crête de la configuration sinusoïdale.
De préférence, comme
représenté sur la Fig.5 le premier
champ magnétique est formé par une pluralité de barreaux magnétiques 68'' disposé sur la surface 64 du stator 50'' de sorte que la magnétisation des aimants de la barre 68'' est déplacé dans la sinusoïdal
motif de la ligne de démarcation 49
autour de la ligne périphérique de démarcation 49 le motif sinusoïdal des barreaux aimantés 68'' est divisé en premier et second secteurs, la limite de ce qui
se produit au niveau des pics du motif sinusoïdal. La direction d'aimantation des aimants de la
barre 68'' est de sens opposé dans
les première et deuxième secteurs assurant une commutation du deuxième champ
magnétique et entraînant les rotors 12
de la route dans la direction de rotation que le rotor 12 oscille autour de l'axe du rotor 16 et tourne autour de l'axe de
rotation de l'induit 58.
De préférence, le motif
des aimants sinusoïdale a une amplitude de crête prédéterminée, de sorte que
chaque rotor oscille approximativement 12
+/- trente (30) degrés par rapport à une position neutre. Toutefois, la valeur de l'amplitude de crête
n'est pas critique pour la conception du moteur 10. En outre, la période
prédéterminée de la configuration sinusoïdale peut être choisi pour être une
valeur pour laquelle le nombre de cycles du motif sinusoïdal autour de la
surface 64 de le stator 50'' est une valeur entière.
Comme cela sera évident
pour l'homme de l'art, le premier champ magnétique ne doit pas être formé par
les barreaux magnétiques 68'', mais
pourrait être formé à partir d'un seul aimant (ou groupes d'aimants) de sorte
que le premier champ magnétique soit déplacé de façon sinusoïdale autour de
l'axe de rotation de l'armature 58
et qui alternent dans des directions opposées entre chaque sommet de la
configuration sinusoïdale. En outre,
comme cela sera apprécié par l'homme de l'art, le déplacement du premier champ
magnétique n'a pas à être précisément sinusoïdale. Par exemple, le déplacement peut être sous la
forme d'une dent de scie ou en une forme ayant une portion avec des valeurs
positive et négative d'amplitude constante, à l'intérieur de l'esprit et de la
portée de l'invention.
A la suite de la
première champ magnétique se déplaçant de façon sinusoïdale et en alternant
chaque demi-période chaque rotor 12
oscille d'un angle correspondant à peu près à l'amplitude de crête de la
sinusoïde que le rotor 12 suit le
stator des aimants 68". En conséquence, une seconde différence entre
le troisième mode de réalisation et le premier mode de réalisation réside dans
la structure de la tringlerie 62. Dans le troisième mode de réalisation
préféré, représenté sur la Fig.1C,
la tringlerie 62 comprend une tige à
mouvement alternatif 91 de liaison
de chaque rotor 12 à une première
respectif pignon 87 solidaire en
rotation de l'induit 70 de la tige 91 à mouvement alternatif est montée de
manière pivotante sur chaque rotor 12
et de chaque première roue dentée 87,
de sorte que le mouvement oscillant du rotor 12 est converti en un mouvement de rotation de la première roue
dentée 87 chaque première roue
dentée 87 est couplé à un second
engrenage 89 unique, fixé au stator 50 dans une position fixe. Le mouvement de rotation de chaque première
roue dentée 87 entraîne l'armature 70 pour pivoter autour de l'axe
d'induit de rotation 58 lorsque les
rotors 12 osciller autour de l'axe
du rotor 16. Comme cela sera apprécié par l'homme de
l'art, la vitesse du moteur 10 est
déterminée par le rapport de la première roue dentée 87 à la deuxième roue 89
conformément à l'expression :
Sa = (1 / Ns) x Sr .................... (2)
Où :
Ssest la vitesse
angulaire de l'induit 70 (RPM) ;
Ns est le nombre
de premières périodes de champ magnétique à travers le stator 50'' ; et
Sr est la vitesse
angulaire du rotor 12 (RPM).
Parce que chaque rotor 12 oscille au lieu de faire tourner
continuellement, un seul aimant de rotor unique, (ou groupe d'aimants) sur un
rotor 12 donné interagit avec le
seul stator 50''. En conséquence, une troisième différence
entre le troisième mode de réalisation préféré et le premier mode de
réalisation préféré se pose en raison du mouvement oscillatoire de chaque rotor
12, grâce à quoi chaque rotor 12 du troisième mode de réalisation
préféré ne dispose que d'une seule paire d'aimants 32. Cependant, comme cela
sera apprécié par l'homme de l'art, les redresseurs supplémentaires 50'' peut être ajouté à la périphérie
de rotors 12 et les paires
supplémentaires d'aimants en forme de U 20
peut être inclus sur chaque rotor 12
pour interagir magnétiquement avec chaque stator supplémentaire 50'', fournissant ainsi force motrice
supplémentaire.
En se référant maintenant aux Fig.6, Fig.7A, Fig.8A et Fig.8B, on a représenté un quatrième
mode de réalisation préféré du moteur à aimant permanent 10 pour fournir la force motrice unidirectionnel de rotation. Le quatrième mode de réalisation préféré comprend
un stator 51 de forme générale
circulaire ayant un stator axe 72,
fixé à une base 18 Le stator 51 comporte une surface externe 64 divisée en un premier côté 52 et un deuxième côté 54, par une ligne circonférentielle de
démarcation 49, comportant une
direction prédéterminée autour de l'axe du stator 72, vers un point médian de la surface extérieure 64.
De préférence, la
surface 64 du stator 51 est courbe, ayant une courbure
conforme à l'arc de rotors 12. Toutefois, il sera apprécié par l'homme de
l'art que la surface 64 n'a pas
besoin d'être courbé mais pourrait être plane et encore être à l'intérieur de
l'esprit et de la portée de l'invention.
Comme cela sera apprécié par l'homme de l'art le stator 51 est simplement conçu comme une
structure de support fixe pour aimants du stator et, de ce fait, la forme du
stator n'est pas destiné à être le contrôle de la taille et de la forme de la
lame d'air entre des aimants fixés sur le stator et les aimants fixés sur les
rotors.
Comme le montre la Fig.8A, une ou plusieurs paires
d'aimants de stator 46 sont fixés à
la surface extérieure 64 espacées le
long de la ligne de démarcation 49. Chaque paire d'aimants de stator 46 comporte un premier aimant du stator
40 ayant un pôle nord et un pôle sud
et un second stator 42 aimant ayant
un pôle nord et un pôle sud. Le pôle sud
de chaque premier aimant du stator 40,
se trouve sur le premier côté 52 de
la surface extérieure 64, et le pôle
nord du premier aimant du stator 40
est le plus proche de la ligne de démarcation 49. Le pôle nord de chaque
second aimant du stator 42 est situé
sur le second côté 54 de la surface
externe 64 et le pôle sud de chaque
deuxième aimant du stator 42 étant
plus proche de la ligne de démarcation 49
le premier et la deuxième des aimants du stator 40, 42 sont espacées le long de la ligne de démarcation 49 de sorte qu'une première distance
inter-aimant mesurée le long de la ligne de démarcation 49 entre le pôle nord du premier aimant du stator 40 et le pôle sud du second aimant de
stator 42 d'une paire adjacente
d'aimants 46 est généralement égale
à une seconde interface la distance de l'aimant mesurée le long de la ligne de
délimitation 49 'entre le pôle sud du premier aimant du stator 40 et le pôle nord du second aimant de
stator 42.
Dans le quatrième mode
de réalisation préféré, les aimants du stator 40, 42 sont des barreaux aimantés.
De préférence, le pôle nord de chaque premier aimant du stator 40 et le pôle sud de chaque second
aimant du stator 42 sont inclinées
vers la direction prédéterminée. De plus,
les barreaux magnétiques sont de préférence orientés sur la surface 64 du stator 50 de sorte que le pôle sud de chaque premier aimant 40 et le pôle nord de chaque second
aimant 42 est plus proche de la
périphérie de chaque rotor 12 que le
pôle de polarité opposée de chacun des aimants 40, 42. Comme cela sera apprécié par l'homme de
l'art, les aimants du stator 40, 42
ne sont pas nécessairement des barreaux aimantés. Par exemple, chaque aimant du stator 40, 42 peut être un aimant en forme de
U, ou peut être constitué d'aimants séparés, aussi longtemps que le premier
champ magnétique généré par les aimants est généralement équivalent à celui
produit par les aimants en barre.
Dans le quatrième mode
de réalisation préféré, une armature 70
ayant un axe d'induit de rotation 58
qui coïncide avec le stator axe 72
est fixé au stator 51 par un axe
d'induit 57, dont l'armature axe 57 qui permet l'armature 70 de tourner librement autour du
stator axe 72. Chaque rotor 12 est espacée de l'armature 70
par une entretoise 71 et l'induit
est monté sur l'armature d'entretoise 71
de manière à être libre de tourner autour de l'axe du rotor, le rotor 16 l'axe 16 est orienté de sorte que le rotor 12 tourne dans un plan généralement aligné avec l'axe de rotation
de l'induit 58 dans le quatrième
mode de réalisation préféré, cinq rotors 12
sont fixés à l'armature 70 de
préférence, les rotors 12 sont
uniformément espacées autour de la circonférence du stator 50 avec un espacement de 12
que les rotors mesurée à la surface 64
du stator 51 à peu près égale à un
multiple entier de deux fois la distance inter-aimant. Cependant, comme l'homme
de l'art s'en rendra compte, il n'est pas nécessaire de disposer les rotors 12 uniformément espacées. En outre, le nombre de rotors 12 peut être aussi peu que un et aussi
grand que la taille et les contraintes d'espace permettent. Comme cela sera apprécié par l'homme de
l'art, l'axe du stator 72 ne doit
pas être confondu avec l'axe de rotation de l'induit 58. En conséquence, un
stator 50 disposé autour de l'axe
d'induit 58 à l'endroit où le stator
axe 72 est parallèle à l'axe
d'induit 58 et la surface du stator 50 fait face à la périphérie des rotors
12, fournissant ainsi de
l'interaction entre le premier champ magnétique et le second champ magnétique
autour de l'axe de l'armature 58,
est à l'intérieur de l'esprit et de la portée de l'invention.
En se référant
maintenant à la Fig.7A, chaque rotor
12 comporte un premier aimant en
forme de U 20 générer un deuxième
champ magnétique. Le premier aimant en
forme de U 20 est positionné sur le
rotor 12 de sorte que le pôle nord
et le pôle sud du premier aimant en forme de U 20 des faces 16 vers
l'axe du rotor 12, et la face
arrière 26 du premier U l'aimant en
forme de 20 fait face à la
périphérie du rotor 12. Lorsque l'arrière 26 du premier aimant en forme de U 20 est adjacente au pôle nord de l'un des premiers aimants de
stator 40 le long de la ligne de
démarcation 49, une partie de la
seconde magnétique champ directement adjacent à l'arrière 26 du premier aimant en forme de U 20 coopère avec une partie du premier champ magnétique généré par
le pôle nord du premier aimant du stator 40
pour entraîner le rotor 12 en
rotation dans le sens antihoraire.
Lorsque le rotor 12 tourne
dans le sens anti-horaire, une partie du deuxième champ magnétique associé au
pôle sud de la première forme de U-aimant 20
coopère avec une partie du premier champ magnétique associé au pôle sud du
premier aimant du stator 40, donnant
lieu à une force dans la direction de l'axe du rotor 16, de repousser l'aimant en forme de U 20, et entraînant le rotor 12
à traduire dans la direction prédéterminée autour de l'axe du stator. Lorsque le rotor 12 se déplace loin de premier aimant du stator 40 dans le pré-direction du deuxième champ magnétique au voisinage
de l'arrière 26 de l'aimant en forme
de U 20 interagit avec la partie du
premier champ magnétique associé au pôle sud du second stator 42 aimant de la paire d'aimants 46, entraînant le rotor 12 à demi-tour et tourner dans le sens
des aiguilles d'une montre.
Le passage de la
deuxième champ magnétique associé avec le pôle nord de l'aimant en forme de U 20 puis interagit avec la partie du
premier champ magnétique associé au pôle nord du second aimant de stator 42, ce qui donne encore lieu à une
force dans la direction de l'axe du rotor 16,
de repousser l'aimant en forme de U 20
et à amener le rotor 12 à traduire
dans la direction prédéterminée. Un
cycle d'oscillation est ensuite répétée avec le deuxième champ magnétique du
rotor 12 coopérant avec le premier
champ magnétique de la paire adjacente d'aimants 46. Par conséquent, le rotor
12 oscille en rotation autour de
l'axe de rotor respectif 16 et
génère une force dans la direction de l'axe du rotor 16, ce qui provoque l'armature 70
de tourner dans la direction prédéterminée autour de l'axe de rotation de
l'induit 58 pour fournir la force
motrice de rotation du moteur unidirectionnel.
Comme cela sera apprécié par l'homme de l'art, le quatrième mode de
réalisation n'est pas limité à un seul stator 51 et un seul aimant en forme de U 20. Stators supplémentaires
ayant des première et deuxième aimants de stator 40, 42 disposées de manière identique sur le stator 51 à interagir avec des aimants en
forme de U espacées autour de la périphérie de chaque rotor correspondant sont
à l'esprit et la portée de l'invention.
En se référant maintenant à la Fig.6, Fig.7B et la Fig.8A, on
a représenté un cinquième mode de réalisation préféré du moteur à aimant
permanent 10 pour fournir une force
motrice de rotation unidirectionnelle. La structure et
le fonctionnement du cinquième mode de réalisation préféré est similaire à
celui du quatrième mode de réalisation préféré, sauf que chaque rotor 12 comprend en outre une deuxième
aimant en forme de U 24 ayant un pôle
nord et un pôle sud au pôle sud de la seconde forme de U aimant 24 en butée contre le pôle nord du
premier aimant en forme de U 20, et
un troisième aimant en forme de U 22
ayant un pôle nord et un pôle sud, avec le pôle nord de la troisième aimant en forme
de U 22 en butée contre le pôle sud
de la 20. Premier aimant en forme de U Lorsque le rotor
12 tourne en raison de l'interaction
de la partie de la deuxième champ magnétique adjacent à l'arrière de l'aimant
en forme de U 20 avec le premier
champ magnétique, un troisième champ magnétique généré par le pôle nord d'le
second aimant en forme de U 24 et un
quatrième champ magnétique engendré par le pôle sud du troisième aimant en
forme de U 22 par interaction avec
le premier champ magnétique généré par chaque paire d'aimants de stator 46 de sorte que chaque rotor 12 pour générer une force dans la
direction de l'axe du rotor 16,
provoquant ainsi l'armature 70 à
tourner dans le sens pré-déterminé autour de l'axe 58 du stator 51 pour
fournir la force motrice de rotation du moteur unidirectionnel.
Dans le cinquième mode
de réalisation préféré, la partie du second champ magnétique au voisinage de
l'arrière 26 du premier aimant en
forme de U 20 sert à faire tourner
le rotor 12, tandis que les deuxième
et troisième aimants en forme de U 24,
22 génèrent des champs magnétiques assurant le force dans la direction de
l'axe du rotor 16. Par conséquent, le cinquième mode de
réalisation préféré est potentiellement plus puissante que le quatrième mode de
réalisation préféré. Comme cela sera apprécié par l'homme de
l'art, les aimants du stator 40, 42
ne sont pas nécessairement des barreaux aimantés. Par exemple, chaque aimant du stator 40, 42 pourrait être remplacée par un
aimant en forme de U ou peut être constitué d'aimants séparés, aussi longtemps
que le premier champ magnétique généré par les aimants est généralement
équivalent à celui produit par les barreaux aimantés.
En se référant maintenant à la Fig.6, Fig.8C et
Fig.8D et il est représenté
un sixième mode de réalisation préféré
du moteur 10.
La structure et le fonctionnement de la sixième forme de réalisation préférée est identique à
celle du cinquième mode de réalisation préféré, sauf que :
(1) Les aimants
du stator 40', 42' sur la surface 64 du stator 51'
sont dans une orientation légèrement différente;
(2) D’un aimant
du stator 41
supplémentaire est ajouté à chaque paire d'aimants de
stator 46
et
(3) Les aimants en forme de U 22, 24
reliés entre rotor 12 sont
remplacées par des barreaux magnétiques 36, 38.
Plus précisément, et en se référant
maintenant à Fig.8C, la
direction d'aimantation de chaque
premier aimant de stator 40' et chaque second aimant du
stator 42'
est orienté pour être généralement
perpendiculaire à la ligne de délimitation 49 au lieu d'être incliné
dans la direction
prédéterminée autour de l'axe de
rotation de l'armature 58 comme
dans le cinquième
mode de réalisation.
En outre, le stator 51'
comprend également un troisième aimant de stator 41
monté sur la surface extérieure 64 le
long de la ligne de démarcation 49 à mi-chemin
entre chaque premier
aimant de stator 40' et chaque deuxième aimant
du stator 42. Comme le montre la Fig.8C et Fig.8D,
le troisième aimant
de stator 41 est orienté de sorte que la direction d'aimantation de la troisième aimant 41
est aligné avec l'axe
16 des rotors 12.
Comme le montre la Fig.8C et Fig.8D, le
rotor 12 utilisée dans
le sixième mode
de réalisation préféré comprend un premier aimant en forme de U 20, similaire à
celle de la cinquième forme de réalisation préférée. Cependant, à la place de la deuxième
et de la troisième aimants en forme de U 24, 22
utilisés dans la cinquième formes de réalisation préférées, le sixième mode de réalisation préféré comprend un premier
propulseur bar aimant 36, espacée de et à
proximité du pôle sud de la
première forme de U aimant 20
et généralement aligné avec un aimant de propulseur
axe 34,
et une seconde
barre d'étrave aimant 38, espacée et à proximité du
pôle nord du premier aimant en
forme de U 20
et aussi généralement aligné avec l'axe de l'aimant de propulseur 34 l'axe du propulseur 34 se trouve dans le
plan du rotor 12 et coupe l'axe
de rotor 16 similaire
à la cinquième
forme de réalisation préférée, l'interaction
de la partie du
second champ magnétique à proximité
immédiate de l'arrière de l'aimant
en forme de U 20 avec le premier champ magnétique fournit la force de
rotation des rotors 12. Que le rotor 12 tourne
dans le sens des aiguilles d'une
montre (vu à partir de la seconde extrémité
30 du stator 51'), un
troisième champ magnétique généré par à la fois le pôle
nord et le pôle sud du second
propulseur aimant 36 coopère avec
le premier aimant
du stator 40',
générer à nouveau une force dans la direction de l'axe du rotor 16 de la même
façon, lorsque le rotor 12 tourne dans
le sens inverse des aiguilles d'une
quatrième champ magnétique engendré à la fois par le pôle
nord et le pôle sud de l'le
premier aimant de propulseur 38 interagit
avec un second aimant de stator
42', générer une force dans la direction de l'axe du rotor 16 le résultat
de la force dans
la direction de l'axe du rotor
16 est de provoquer l'armature
70 de pivoter dans la
direction prédéterminée autour de l'axe de rotation de l'induit
58 pour fournir la force motrice de rotation unidirectionnelle du moteur 10.
Dans le sixième
mode de réalisation préféré, les aimants de stator 40', 41,
42' et les
aimants de poussée 36, 38 sont des barreaux aimantés. Cependant, comme cela sera apprécié par l'homme de l'art, les aimants de stator
40', 41, 42' et le
propulseur aimants 36, 38 ne sont pas
nécessairement des barreaux aimantés. Par exemple, chaque aimant du stator 40', 42' peut être un aimant en
forme de U ou peut être constitué d'aimants séparés,
aussi longtemps que le premier champ magnétique généré par les aimants est généralement
équivalent à celui produit par les barreaux
aimantés.

En se référant
maintenant à la Fig.6, Fig.7D et Fig.8E il est représenté un septième mode de réalisation préféré du
moteur 10. La structure et le fonctionnement du septième
mode de réalisation préféré est similaire à la sixième forme de réalisation
préférée, sauf que le troisième aimant de stator 41' situé sur la surface 64
du stator 51” le long de la ligne de
délimitation 49 est un aimant en
forme de U 41' à l'arrière de
l'aimant en forme de U 41' en regard
du rotor 12 et la direction
d'aimantation étant perpendiculaire à la ligne de démarcation 49 ; et l'aimant en forme de U 20 est remplacé par un barreau
magnétique 20' orienté pour que le
sens d'aimantation aligné avec une ligne radiale du rotor 12. Comme dans le sixième
mode de réalisation préféré, chaque aimant du stator 40', 42' peut être un l'aimant en forme de U ou pourrait être
constitué d'aimants séparés, aussi longtemps que le premier champ magnétique généré
par les aimants du stator 40', 42'
est généralement équivalent à celui produit par les barreaux aimantés.
En se référant
maintenant à la Fig.7A, Fig.8A, Fig.8B, Fig.9 et la Fig.11A, on a représenté un mode de
réalisation préféré de la huitième moteur 10
pour fournir la puissance linéaire unidirectionnel motrice. Le huitième mode de réalisation préféré
comprend un stator linéaire 48 ayant
une section transversale généralement courbée perpendiculaire à une ligne de
démarcation longitudinal 49
s'étendant sur une surface du stator 64, entre une première extrémité 28 et une seconde extrémité 30
et en divisant la surface 64 du
stator 48 dans un premier côté 52 et un second côté 54 de préférence, la section
transversale généralement courbe de stator 48
est concave. Toutefois, il sera apprécié par l'homme de l'art que la section
transversale ne doit pas être concave, mais pourrait être plane ou convexe et
même encore être dans l'esprit et la portée de l'invention.
Le stator linéaire 48 est identique au stator 51 de forme générale circulaire à
l'exception de la surface 64 du
stator 48 étant linéaire dans la
direction de la ligne de délimitation 49
au lieu d'être circulaire dans la direction de la ligne de démarcation 49.
Le huitième mode de réalisation
préféré comprend le premier et le
second aimants de stator 40, 42 (voir Fig.8A),
l'emplacement et l'orientation de
celles-ci pratiquement identique
à l'orientation et l'emplacement des aimants du stator 40, 42 sur le stator circulaire
51. En conséquence, fixé au stator linéaire
48 est une ou plusieurs paires
d'aimants 46,
chaque paire d'aimants de stator 46
à générer un premier champ magnétique
et comportant un aimant premier stator 40 ayant un pôle
nord et un pôle
sud et un deuxième
aimant de stator 42 ayant une
pôle nord et un
pôle sud. Le
pôle sud de chaque premier aimant du stator 40, se trouve sur le premier côté 52 de
la surface externe 64, avec le pôle nord du premier aimant
du stator 40
étant plus proche de la ligne de démarcation 49. Le
pôle nord de chaque
second aimant du stator 42 est
situé sur le second côté 54 de la surface externe 64 avec le pôle sud
de chaque second aimant du stator 42 étant plus proche
de la ligne de démarcation 49 le premier et le second des aimants du stator 40, 42 sont espacées le long de la ligne de démarcation 49 de sorte qu'une première distance inter-aimant mesurée le long de
la ligne de
démarcation 49 entre le pôle nord
du premier aimant du stator 40 et le pôle sud du second aimant de stator
42 d'une paire adjacente d'aimants 46 est
généralement égale à une seconde
interface la distance de l'aimant mesurée le long de la ligne de démarcation 49 entre le pôle sud du premier
aimant du stator 40 et le pôle nord du second aimant
de stator 42.
Dans le huitième
mode de réalisation préféré, les aimants de stator 40, 42 sont des barreaux magnétiques, le pôle nord de chaque premier
aimant du stator 40 et le pôle sud de
chaque second aimant
du stator 42
étant inclinée vers la seconde extrémité
30 du stator linéaire
48. En outre, comme le montre la Fig.8A, les aimants de stator 40, 42 sont orientées sur la
surface 64 du stator 51 de
sorte que le pôle sud de chaque
premier aimant 40 et le pôle nord de
l'aimant 42 secondes sont plus
proches de la périphérie de chaque
rotor 12 que le pôle de polarité
opposée de chacun des aimants
du stator 40, 42. Comme
cela sera apprécié par l'homme de l'art, les aimants du stator 40, 42
ne sont pas nécessairement des barreaux
aimantés. Par
exemple, chaque aimant du stator
40, 42 peut être un aimant en
forme de U ou peut être constitué d'aimants séparés,
aussi longtemps que le premier champ magnétique généré par les aimants est généralement
équivalent à celui produit par les aimants en
barre.
Le huitième mode
de réalisation préféré comprend également des rails 80
ayant un axe longitudinal situé généralement parallèle à la ligne de délimitation 49 des ensembles
stator 48 du rotor 14. Cinq comprenant
un rotor 12 et un ensemble de palier 84 sont fixé de
manière coulissante sur le rail 80.
De préférence, l'ensemble de palier 84, comme représenté sur la Fig.11A, comprend une paire de premiers
paliers 88 montés de manière
coulissante sur le rail 80 et
contraint à coulisser le long du rail, sans rotation notable, par un bossage 37 de chaque premier palier 88, qui est claveté à une rainure
longitudinale 35 sur le rail 80 un second palier 90 est relié à rotation à la première
paire de roulements 88 par des
roulements à billes. Le rotor 12 est fixé sur la deuxième palier 90.
Ainsi, le rotor 12 fixé à
chaque ensemble de palier 84 est
libre d'osciller en rotation sur le rail 80
et pour générer une force le long du rail 80
dans la direction de la seconde extrémité du stator 30.
De préférence, le
huitième mode de réalisation préféré comprend un réticuler 94 qui relie chaque ensemble de palier 84 ainsi que par les reliant entre elles les premiers roulements 88 de chaque ensemble de palier 84, ce qui augmente ainsi le mouvement
linéaire le long du rail 80 de
chaque rotor 12.
De préférence, chaque
rotor 12 comprend un ou plus d'un
des aimants du rotor 20, chaque
aimant de rotor 20 à générer une
deuxième champ magnétique qui interagit avec le premier champ magnétique pour
provoquer le rotor 12 à osciller en
rotation autour de l'axe du rail 80
et pour générer une force dans la direction de l'axe du rail 80 pour fournir la puissance motrice
linéaire unidirectionnel du moteur. Dans
le huitième mode de réalisation préféré, chaque rotor 12 est sensiblement identique au rotor 12 décrit pour la quatrième forme de réalisation préférée. En conséquence, chaque aimant de rotor
comporte un premier aimant en forme de U 20
ayant un pôle nord et un pôle sud et un côté arrière 26, une première partie du second champ magnétique à proximité
immédiate de l'arrière 26 de la
forme de U aimant 20 coopérant avec
chaque premier champ magnétique pour faire chaque rotor 12 à osciller en rotation sur le rail 80. Une deuxième partie de
la deuxième champ magnétique adjacent au nord et le pôle sud du premier aimant
en forme de U 20 interagit avec le premier
champ magnétique pour provoquer l'rotor 12
pour générer une force dans la direction de l'axe du rail 80 assurant ainsi la force motrice linéaire unidirectionnel du
moteur. Comme il est clair pour l'homme de l'art, l'opération de la huitième
forme de réalisation préférée est identique à celui du quatrième mode de
réalisation préféré, sauf que le mouvement des rotors réticulés 12 est linéaire le long du rail 80 au lieu d'être en rotation autour de
l'axe de rotation induit de 58 en
conséquence, dans un souci de concision, une description du fonctionnement de
la huitième mode de réalisation préféré ne se répète pas.
En se référant
maintenant à la Fig.7B, la Fig.8A, Fig.8B, Fig.9 et Fig.11A il est représenté un neuvième
mode de réalisation préféré du moteur 10
pour fournir la puissance linéaire unidirectionnel motrice. Comme cela sera évident pour l'homme de
l'art, la structure et le fonctionnement de la neuvième forme de réalisation
préférée est pratiquement identique à celle du cinquième mode de réalisation
préféré, sauf que le mouvement des rotors réticulés 12 est linéaire au lieu de rotation autour de l'armature l'axe de
rotation 58 en conséquence, dans un
souci de brièveté, une description de la structure et le fonctionnement de la
neuvième forme de réalisation préférée n'est pas répétée.
En se référant
maintenant à la Fig.2, la Fig.3, Fig.10 et la Fig.11B, on
a représenté un mode de réalisation préféré de la douzième moteur 10 pour fournir la force motrice
linéaire. Comme le montre la Fig.10, le douzième mode de réalisation
préféré comprend un stator linéaire 47
ayant une section transversale généralement courbée perpendiculaire à une ligne
de délimitation 49 's'étendant le
long d'un point médian du stator 47
entre une première extrémité 28 et
une deuxième extrémité 30 de le
stator linéaire 47, un rail 80 'relié au stator linéaire 47 ayant un axe généralement parallèle
à la ligne de délimitation 49', des
ensembles d'un ou plusieurs rotors 14'
comprenant des rotors 12 connectés
au rail 80' par un ensemble de
palier 84' et une liaison croisée 94' reliant les liaisons 84' des rotors adjacents 12 de préférence, la section
transversale généralement courbe de stator 47
est concave, ayant une courbure conforme à l'arc de rotors 12. Cependant, il sera
apprécié par l'homme de l'art que la section transversale globalement incurvée
concave n'est pas nécessairement plane mais pourrait être convexe ou même et
être toujours dans l'esprit et la portée de l'invention.
Comme le montre la Fig.3, le stator linéaire 47 comprend un ou plusieurs aimants 68 disposés sur la surface 64 du stator 47 linéaire, chaque aimant 68
ayant une direction d'aimantation orientée à un angle droit à la ligne de
délimitation 49' et résultant en un
premier champ magnétique orienté généralement à angle droit à la ligne de
démarcation 49'. L'amplitude du premier champ magnétique est
sensiblement uniforme, sauf dans la région null 78, dans lequel l'amplitude du premier champ magnétique est
sensiblement réduite. Le stator linéaire 47
de la douzième réalisation préférée est pratiquement identique au stator
circulaire 50 de la première forme
de réalisation préférée à l'exception du stator linéaire 50 est linéaire dans la direction de la ligne de délimitation 49' au lieu d'être circulaire autour de
l'axe d'armature de rotation 58. En outre, la disposition des aimants 68 sur la surface 64 du stator 47 et la
structure de la région 78 nulle est
le même que pour le premier mode de réalisation préféré, comme illustré sur la Fig.3 et comme décrit en détail dans le
discussion du premier mode de réalisation.
Par conséquent, dans un souci de brièveté, une description plus
détaillée de la structure du stator linéaire 47 ne sont pas répétées.
Les rotors 12 du douzième mode de réalisation préféré
ont chacun un axe de rotation 16 qui
est aligné avec un axe du rail 80'. Les rotors 12 sont reliées au rail 80' par
l'ensemble de palier 84' de sorte
que chaque rotor 12 est libre de
tourner autour de la glissière 80'
et à coulisser le long du rail 80. De préférence, comme représenté sur la Fig.2, chaque rotor 12 comporte trois paires d'aimants en
forme de U 32, 32', 32", chaque
aimant en forme de U comportant une face arrière 26 et la génération d'un second champ magnétique. Une partie du second champ magnétique
adjacent à la face arrière 26 de
chaque aimant en forme de U 20
interagit avec le premier champ magnétique de sorte que chaque rotor 12 en rotation autour de l'axe du rail 80, les rotors 12 du douzième mode de réalisation préféré sont les mêmes que les
rotors dans le premier mode de réalisation préféré, comme décrit sur la Fig.2 et entièrement décrite
ci-dessus. Par conséquent, dans un souci
de concision, la description détaillée des rotors 12 n'est pas répétée.
Comme le montre la Fig.11B, le rail 80' comporte une rainure hélicoïdale 86 avec un pas prédéterminé (c'est à dire, tourne / unité de
longueur) qui s'étend autour de la périphérie du rail 80'. L'ensemble de palier 84' relie chaque rotor 12 de la rainure hélicoïdale 86, la conversion du mouvement de
rotation de chaque rotor 12 autour
du rail 80' pour le mouvement
linéaire le long du rail 80’. Comme le montre la Fig.11B, l'ensemble de palier 84'
comprend une paire de premiers paliers 88'
monté sur le rail 80' et
contraint à coulisser le long du rail 80'
sans rotation notable, et une deuxième palier 90’, monté sur un surface externe du premier palier 88' pour recevoir le rotor 12 de préférence, chaque palier 88’ d'abord a un patron 37 qui s'engage dans une rainure
longitudinale 35 de sorte que chaque
premier palier 88' glisse sur le
rail 80’ sans rotation que le second
palier 90’ tourne sur les premiers
paliers 88'. Il sera apprécié par l'homme de l'art,
d'autres procédés pour fixer les premiers paliers 88' du rail 80' peuvent
être utilisés, comme par exemple, en faisant la section transversale du rail 80' aplatie (aplatis aux pôles). Comme dans le premier mode de réalisation
préféré, chaque rotor 12 doit
tourner à une vitesse qui se traduit par l'arrière de chaque aimant en forme de
U 20 sur le rotor 12 en passant par l'une des régions
nulles 78 chaque rotation complète
du rotor 12. Par conséquent, l'pas pré-déterminé de la
rainure hélicoïdale 86 sur le rail 80' est de préférence égal :
Pg = (1 / Nr) x Pr ..................... (3)
Où :
Pr = la hauteur
des régions nulle 78 (null
régions/unité de longueur) ;
Nr = nombre d'u
aimants (ou groupes d'est attenant les aimants en forme de U) sur un rotor 12; et
Pg = la hauteur
de la rainure hélicoïdale 86
(révolutions/unité de longueur).
De préférence, les
portions de la rainure hélicoïdale 86
correspondant à chaque région nulle 78
ont un terrain instantané qui est supérieur à la hauteur prédéterminée de la
rainure 86 pour augmenter la vitesse
angulaire du rotor chaque 12 comme
chacun d'eux des paires 32, 32', 32''
des aimants en forme de U 20
traverse une des régions nulle 78.
Cependant, comme sera appréciée par ceux du métier, il n'est pas nécessaire de
fournir le terrain plu instantané afin que le moteur 10 pour fournir la force motrice.
Comme décrit ci-dessus,
la réticulation 94' relie le palier 84' des rotors adjacentes 12 ensemble. Comme sur la Fig.10, la réticulation 94' connecte
les roulements premiers 88' de
chaque ensemble de palier 84' au
premier palier 88' de l'adjacent
portant assemblées 84' pour que le
mouvement linéaire de tous les assemblys de rotor 14' sont ajoutés ensemble pour fournir la force motrice linéaire
unidirectionnel du moteur 10.
Comme indiqué
précédemment, le premier préféré incarnation du moteur 10 comprend un rotors seule région null 78 et cinq 12, chaque
rotor 12 ayant trois paires 32, 32', 32'' des aimants en forme de U
est attenant 20. De préférence, les rotors 12 sont uniformément espacées le long
du rail 80' et les paires, 32, 32', 32'' des aimants en forme de U
20 sont espacées uniformément autour
de la périphérie de chaque rotor respectif 12. En outre, les paires, 32, 32', 32'' des aimants en forme de U 20 sont progressivement à l'égard de chaque rotor 12 par un cinquième de tour du rotor 12 afin que les paires, 32, 32', 32'' des aimants en forme de U
20 de tous les rotors 12 traversent la région nulle 78 à un rythme sensiblement uniforme
pour permettre une interaction plus ou moins continue entre le champ magnétique
premier et le deuxième champ magnétique des rotors 12, ayant pour résultat une insistance plus ou moins continue des
assemblées rotor 14' vers la
deuxième fin du stator 47. Comme sera apprécié par les personnes versées
dans l'art, la force motrice fournie par le moteur 10 est proportionnelle au nombre de rotors 12 et le nombre d'aimants en forme de U 20 sur chaque rotor 12. En conséquence, le nombre de rotors 12 et le nombre de couples 32, 32', 32'' d'aimants 20 de la présente invention ne sont pas
limités aux paires de cinq rotors 12
et trois 32 des aimants en forme de
U 20. Ni le nombre de régions null est limité à
l'un. Le nombre d'aimants en forme de U 20 et nulle régions 78 est limité seulement par le respect
de la règle établie par l'équation 3.
Se référant maintenant à la Fig.2, Fig.11B, Fig.12 et Fig.13 il est montré un treizième
préféré incarnation du moteur comprenant un rail 80' pris en charge par montage sur rail de 10 postes 76 et ayant un
axe longitudinal 65. Une rainure hélicoïdale 86 ayant une hauteur prédéterminée s'exécute sur un pourtour du
rail 80.
Le treizième préféré incarnation comprend
également trois stators hélicoïdales premières 82a, 82b, 82c (82)
concentriques entourant le rail 80'
correspondant à trois paires de 32, 32'
32'' des aimants en forme de U 20
monté sur chacun des cinq rotors 12. De préférence, les premiers stators
hélicoïdales 82 ont la même hauteur
comme la hauteur prédéterminée de la rainure 86 et un axe généralement parallèle à l'axe 65 du rail 80'. Une pluralité de premières aimants du stator 11 ayant un gisement de magnétisation
aligné sur une ligne radiale de chaque rotor 12 sont espacées le long de chaque stator hélicoïdal première 82 avec les premiers aimants de stator 11 générant un champ magnétique
première.
Le treizième préféré incarnation plus
comprend la pluralité des stators hélicoïdales deuxième 82a’, 82b’, 82c’ (82’)
alternant avec les premiers stators hélicoïdales 82' de l'axe 65 du rail 80' et vu la hauteur prédéterminée de
la rainure 86. Chaque deuxième stator hélicoïdale 82' a monté sur elle une pluralité de
deuxième aimants du stator 11' ayant
un gisement de magnétisation alignée sur une ligne radiale du rotor 12 et ayant un gisement de
magnétisation en face en direction des premières aimants de stator 11 montée sur chacun des premiers
stators hélicoïdales 82. Par suite de la deuxième stator hélicoïdale 82' se situant à mi-chemin entre les
premiers stators hélicoïdales 82, un
point situé sur un point central entre chaque paire d'aimants de rotor 32, 32' 32'' est pertinent à l'un des
stators hélicoïdales deuxième 82'
comme chaque rotor 12 tourne autour
de l'axe 65 du rail 80' et glisse le long du rail 80'.
Le treizième mode de réalisation préféré
comprend également cinq rotors 12,
(pour plus de clarté, seuls trois sont représentés), ayant un axe de rotation 16 généralement aligné avec l'axe
longitudinal 65 de la glissière 8'.
Chaque rotor 12 est relié au
rail 80' par un ensemble de palier 84' de sorte que le rotor 12 est libre de tourner autour de l'axe
65 de la glissière 80' et le coulisseau le long du rail 80.
De préférence, chaque rotor 12
comprend trois paires 32, 32', 32"
d'aimants en forme de U 20, dans
lequel chaque aimant en forme de U 20
génère un deuxième champ magnétique, dont une partie adjacente à une partie
arrière 26 de la paire de U des
aimants en forme de 20 interagit
avec le premier champ magnétique de chaque aimant du premier stator pour amener
chaque rotor 12 en rotation autour
de l'axe 65 de la glissière 80'.
L'ensemble de palier 84' (représenté en détail sur la figure
12 et Fig.11B) relie chaque rotor 12
de la rainure hélicoïdale autour de la périphérie 86 de la glissière 80 de
l'ensemble de palier 84' est
similaire à l'ensemble de palier 84'
décrit dans l'le douzième mode de réalisation préféré, sauf pour les ouvertures
dans les premiers paliers 88' et
dans le second palier 90' qui
permettent à l'ensemble de palier 84'
au-delà du rail de montage de poteaux 76
que l'ensemble de palier 84' se
déplace le long du rail 80.
Le treizième mode de
réalisation préféré peut être réalisé sous la forme soit d'un moteur linéaire
ou un moteur rotatif. Dans le cas du moteur linéaire, les axes de la barre 80' et de chaque stator hélicoïdal 82 sont sensiblement rectilignes. Le rail 80'
est pris en charge sur la base 18
par rail postes de montage 76 placés
à intervalles réguliers le long du rail 80'. Les poteaux 76 sont situées à des emplacements le long du rail 80' à laquelle la rotation du rotor 12 oriente les ouvertures dans les
premier et second paliers 88', 90'
afin de correspondre aux colonnes de montage 76. Chaque stator hélicoïdal 82a, 82b, 82c est supporté sur la base
de stator montage messages 75. Les rotors 12
sont reliées entre elles par une traverse de liaison 94' qui relie les premiers paliers 88' de chaque ensemble de palier 84' sur le premier palier
88' de l'ensemble de palier 84'
de un rotor adjacent 12 de cette
manière, le mouvement de chaque ensemble de rotor 14' de rotation est ajouté en même temps pour fournir la force
motrice linéaire du moteur linéaire.
Le treizième mode de
réalisation préféré peut également être réalisé sous la forme d'un moteur
rotatif 10, comme illustré sur la Fig.14. Dans ce cas, les axes de la barre 80' et les stators hélicoïdales 82 sont configurés de manière à être
circulaire. Le moteur configuré de
manière circulaire 10 comprend une
armature 70 située centralement à
l'intérieur du périmètre du rail 80'. L'armature 70 tourne autour d'un axe de rotation de l'armature 58 solidaire en rotation à l'intérieur
d'une base de moteur 18 pour
laquelle le rail 80' sont également
fixés par des poteaux de fixation 76
(non représentés). Le pas de la première
et de la seconde hélice stators 82, 82',
mesuré selon un rayon du rail 80, de
préférence égale à la hauteur prédéterminée de la rainure hélicoïdale 86 de l'armature 70 est solidaire du premier support 88 (voir Fig.11B) de
chaque assemblage de support 84' par
une armature d'entretoise 71 en
ajoutant de ce fait en même temps la force motrice de rotation de chaque
ensemble de rotor 14 afin que
l'armature entretoise 71 n'interfère
pas avec les premier et deuxième stators hélicoïdales 82, 82', la première et deuxième stators hélicoïdales 82, 82' sont faits pour avoir une
ouverture vers l'axe de rotation de l'armature 58.
De préférence, chaque
premier stator hélicoïdal 82a, 82b, 82c est monté sur une pluralité de
premiers aimants de stator 11 avec
chaque aimant du stator 11 ayant une
direction d'aimantation aligné avec une ligne radiale du rotor 12 De préférence, les premier stators
hélicoïdales 82 sont uniformément
espacées le long de l'axe longitudinal 65
du rail 80' avec chaque premier
stator hélicoïdal 82 correspondant à
l'un de la pluralité de paires d'aimants 32,
32', 32". De préférence,
chaque rotor 12 est positionné sur le
rail 80' de sorte que l'une des
paires d'aimants de rotor 32, 32',
32" est pertinente à l'un des premiers stators hélicoïdales 82 correspondantes lorsque le rotor 12 tourne autour de l'axe 65 de la rail 80 et glisse le long du rail 80'. Cependant, comme l'homme de l'art appréciera,
les paires d'aimants de rotor 32, 32',
32" n'a pas besoin d'être directement pertinent à chaque stator
hélicoïdal 82 lorsque les rotors
tournent 12 afin de générer une
force de rotation.
En variante, comme cela
sera apprécié par l'homme de l'art, le moteur 10 peut être construit sans la deuxième stator hélicoïdal 82'.
Dans le cas le plus simple le moteur 10 pourrait ne comporter qu'un seul premier stator hélicoïdal 82 et un rotor 12 unique comprenant un seul aimant en forme de U 20 de génération du second champ
magnétique. Le seul rotor 12 est de préférence positionné dans la
rainure 86 sur le rail 80' de sorte que l'aimant de rotor en
forme de U 20 est continuellement
pertinent au premier stator hélicoïdal unique 82. Par conséquent, une
partie du second champ magnétique à proximité immédiate de l'arrière 26 de l'aimant en forme de U 20 interagit avec le premier champ
magnétique généré par chaque premier aimant de stator 11” monté sur le stator hélicoïdal 82 pour entraîner le rotor 12
en rotation autour de l'axe 65 de la
glissière 80 et à coulisser le long
du rail 80'. De préférence, lorsque uniquement un seul
premier stator 82 ensemble de
premiers stators 82 est utilisé,
chaque premier aimant de stator 11”
a une direction d'aimantation orientée pour être dans le plan du rotor 12 et généralement perpendiculaire à
une ligne radiale du rotor 12. L'pôle nord et le pôle sud du premier aimant
du stator 11” sont de préférence
espacés de façon que lorsque l'un des pôles du premier aimant du stator 11 est directement pertinent à l'aimant
de rotor 20, le pôle de polarité
opposée est également espacé de l'aimant du rotor 20 en forme de U 12. Comme l'homme du métier appréciera, une
pluralité d'aimants de rotor en forme de U 20
et les stators première hélice correspondant pourrait être utilisé. En outre, comme l'homme du métier appréciera,
d'autres configurations de l'aimant de rotor 20 et l'aimant de stator 11 sont possibles, lesquels s'appuient
sur les nouveaux attributs du champ magnétique au voisinage de l'arrière 26 d'un aimant de rotor en forme de U. 20 par exemple, l'aimant du stator
précédemment décrit 11”
perpendiculaire à la ligne radiale du rotor 12 peut être de deux barreaux magnétiques séparés, espacés, à
l'aimantation de chacune des deux aimants alignés sur une ligne radiale du
rotor et ayant des directions opposées de l'aimantation.

En se référant
maintenant à la Fig.15A et Fig.15B il y est représenté un mode de
réalisation préféré de la quatorzième moteur 10. La quatorzième mode de
réalisation est identique en structure à la treizième mode de réalisation
préféré, sauf que le stator comprend une pluralité de premières nervures 77a, 77b, 77c (77) et deuxième nervures
77a', 77b', 77c' (77') à la place du
premier et du second stators hélicoïdales 82,
82' du treizième mode de réalisation.
En substituant les nervures 77,
77' pour les stators hélicoïdales 82,
82', la fixation de l'armature 70
pour les rotors 12 est
simplifiée. Comme l'homme de l'art
appréciera, la longueur des nervures 77,
77' peut varier d'aussi peu que 45 degrés à 265 degrés jusqu'à, avec la
puissance motrice du moteur 10 étant
proportionnelle à la longueur des nervures.
De préférence, la
première et la seconde nervures 77, 77' ont
une hauteur et un espacement qui est conforme à la hauteur prédéterminée de la
barre 80'. De plus l'orientation des premier et second
aimants de stator 11, 11' et des
aimants de rotor en forme de U 20
serait identique à la treizième mode de réalisation. En conséquence, le fonctionnement du
quatorzième mode de réalisation est identique à celui de la treizième mode de
réalisation et n'est pas reprise ici par souci de concision.
En se référant maintenant à la Fig.5, Fig.16 et Fig.17, on a
représenté un mode de réalisation préféré de la quinzième moteur 10, comprenant un rail 80” ayant un axe longitudinal 65 et une rainure 85 généralement sinusoïdale ayant une période prédéterminée autour
de l'exécution une périphérie de la glissière 80”.
De préférence, le
quinzième mode de réalisation préféré comprend trois stators généralement
identiques 50" disposés de
façon circulaire autour du rail 80". Chaque stator 50" présente une surface 64
tournée vers le rail 80" et
disposé à égale distance de et généralement parallèle à l'axe 65 de la glissière 80". Comme le montre la
Fig.5 et la Fig.17 chaque stator 50"
a une section transversale généralement incurvée et une ligne de démarcation
longitudinale 49 perpendiculaire à
la section transversale et situé à environ un point médian de la surface 64.
Une pluralité d'aimants
de stator 68" sont fixés à la
surface 64 du stator 50" la génération d'un premier
champ magnétique. Les aimants de stator 68" sont déplacés sur la surface 64 dans une configuration sinusoïdale
autour de la ligne de démarcation 49. Le motif sinusoïdal a une période
pré-déterminée et un maximum prédéterminé (pic) amplitude le long de la ligne
de démarcation 49. Le cas où le rail 80" et la ligne de délimitation longitudinale 49 du stator 50" sont en ligne droite, la période de la sinusoïde est de
préférence égale à la période de la rainure 85 sur le rail 80.
Le motif sinusoïdal est
également divisé en une pluralité de premiers et seconds secteurs alternés avec
une limite entre les secteurs alternés se produisant à chaque maximum (pic)
d'amplitude de la sinusoïde. La
direction d'aimantation des aimants du stator 68" est opposé au premier et
les seconds segments de telle sorte que la direction du premier champ
magnétique dans chaque premier segment est opposée à la direction du premier
champ magnétique dans chaque second segment. De préférence, la direction
d'aimantation des aimants du stator 68" est généralement perpendiculaire à
une ligne radiale du rotor 12. En variante, la direction d'aimantation des
aimants du stator 68" peut être
généralement aligné avec une ligne radiale du rotor 12. En outre, comme cela
sera évident pour l'homme de l'art, le premier champ magnétique n'a pas à être
formée par une pluralité d'aimants en barre, mais pourrait être formé à partir
d'un seul aimant de façon que le premier champ magnétique soit déplacée de
façon sinusoïdale à partir de la ligne de démarcation et 49 alternent dans des directions opposées entre les pics de la
sinusoïde. En outre, comme cela sera
apprécié par l'homme de l'art, le déplacement du premier champ magnétique n'a
pas à être précisément sinusoïdale. Par
exemple, le déplacement peut être sous la forme d'une dent de scie ou en une
forme ayant une portion avec des valeurs positive et négative d'amplitude constante,
à l'intérieur de l'esprit et de la portée de l'invention.
De préférence, le
quinzième mode de réalisation préféré comporte cinq rotors 12, de chaque rotor 12
ayant un axe 16 aligné avec l'axe de
la glissière 80”. Chaque rotor 12 est relié au rail 80”
par un assemblage de support 84’ de
sorte que le rotor 12 est libre de
tourner autour de l'axe de la glissière 65
et glissent le long du rail 80”. De préférence, chaque rotor 12 comprend trois paires aimant en
forme de U 32, 32' 32”, chaque paire
comprenant deux aimants en forme de U 20. Chaque aimant en forme de U 20 présente une face arrière et génère
un deuxième champ magnétique. Chacune
des paires d'aimants en forme de U 32,
32' 32” est positionnée sur chaque rotor 12, de sorte que la face arrière 26 de chaque aimant en forme de U 20 est pertinent pour le premier et le second segments du motif
sinusoïdal que l'au moins un ensemble de rotor 14 tourne autour de l'axe du rotor 16, dans lequel l'interaction d'une partie du deuxième champ
magnétique à proximité immédiate de l'arrière 26 de chaque aimant 20
en forme de U avec le premier champ magnétique d'un stator correspondant des
causes 50” au moins un rotor 12 à osciller en rotation autour de
l'axe 65 de la glissière 80”.
L'homme du métier comprendra qu'il n'est pas nécessaire d'avoir trois
paires d'aimants en forme de U 32, 32'
32”. Par exemple, le nombre
d'aimants 20 (ou groupes d'aimants
en butée en forme de U) en forme de U espacées autour de la périphérie du rotor
12 peut aller d'un simple aimant
unique en forme de U 20, ou peut
varier en nombre jusqu'à un nombre d'aimants limité que par l'espace physique
autour de la périphérie du rotor 12
en outre, le nombre de mises en aboutement des aimants en forme de U 20 dans un groupe d'aimants 32 peut également varier de 1 à un
certain nombre d'aimants limité que par l'espace physique autour de la
périphérie du rotor 12 de
préférence, le nombre de stators 50”
est égal au nombre de paires aimant en forme de U 32, 32' 32”. Cependant,
comme cela sera apprécié par l'homme de l'art, le nombre de stators 50” est pas limité à trois mais peut
être un nombre quelconque allant vers le haut à partir de l'un, où le nombre de
stators 50” sera de préférence égal
au nombre de U paires d'aimants en forme de 32, 32' 32”.
Comme le montre la Fig.16 l'ensemble de palier 84’ convertit le mouvement
d'oscillation de l'au moins un rotor 12
sur le rail en un mouvement linéaire unidirectionnel le long du rail 80' en suivant la rainure sinusoïdale 85 dans le rail 80’ avec le bossage 92 (représenté sur la Fig.11B). Une reticulation 94 relie l'ensemble de palier 84’
de rotors adjacents 12 ensemble, ce
qui augmente ainsi le mouvement linéaire de chaque ensemble de rotor 14' le long du rail pour fournir la
puissance motrice linéaire unidirectionnel.
La structure de l'ensemble de palier 84’ et la liaison transversale 94
est représentée sur la Fig.12 et Fig.11B, et le fonctionnement est
identique à la liaison 84' et la
liaison transversale 94’ décrit pour
le douzième mode de réalisation. Par conséquent,
une description détaillée de la liaison 84’
et la reticulation 94 ne se répète
pas, pour des raisons de brièveté.
Dans un autre aspect,
le quinzième mode de réalisation préféré peut également être configuré dans une
disposition circulaire similaire à celui du quatorzième mode de
réalisation. Dans le mode de réalisation
préféré, XV, le stator hélicoïdal 82’
représenté sur la Fig.14 est
remplacé par un ou plusieurs stators de courbes 50” espacées autour des rotors 12. Dans ce cas, la période du motif sinusoïdal
d'aimants du stator est ajustée à fonction de la distance de la surface 64 de la respective stator 50” de l'axe d'armature de rotation 58, afin que les aimants en forme de U 20 sur les rotors 12 reste pertinent pour les premier et deuxième segments, lorsque
les rotors 12 faites glisser le long
du rail 80”. En conséquence, une description de ces
éléments d'agencement circulaire du quinzième mode de réalisation qui sont les
mêmes que pour le mode de réalisation linéaire ne sont pas répétées, pour des
raisons de concision.
En se référant
maintenant à la Fig.4, la Fig.18 et la Fig.19 on a représenté un mode de réalisation préféré de la
seizième moteur 10 pour fournir la
force motrice unidirectionnel comprenant un rail 80” ayant un axe longitudinal 65
et une rainure hélicoïdale 86 ayant
un pré déterminé terrain, la course autour de la périphérie du rail 80.
De préférence, le
seizième mode de réalisation préféré comprend en outre trois stators
généralement identiques 50', de
chaque stator 50' ayant une surface 64 disposée à égale distance de et
généralement parallèle à l'axe 65 du
rail 80. Chaque stator 50' a une ligne de délimitation longitudinale située 49 autour d'un point central de la
surface 64. De préférence, une pluralité d'aimants de stator
68' sont fixés à la surface du
stator 50' à générer un premier
champ magnétique. La pluralité d'aimants de stator 68’ ont une direction d'aimantation qui tourne autour d'un axe
magnétique parallèle à la ligne de démarcation 49. Dans le cas où le rail 80” et la ligne de délimitation
longitudinale 49 du stator 50' sont dans une ligne droite, le pas
de la rotation des aimants de stator 68'
est de préférence égale à la hauteur prédéterminée de la rainure hélicoïdale 86 sur le rail 80.
L'incarnation seizième plus comprend cinq rotors 12, chaque rotor 12 ayant un axe de rotation 16
aligné avec l'axe 65 du rail 80.
Chaque rotor 12 est relié au
rail 80 pour que le rotor 12 est libre de tourner autour de l'axe
65 du rail 80 et glisser le long du rail 80. Chaque rotor 12 comprend trois paires 32,
32', 32'' des aimants en forme de U 20
espacées autour de la périphérie du rotor 12,
chaque aimant en U 20 générant un
deuxième champ magnétique. Les aimants
en forme de U 20 sont positionnés
sur chaque rotor 12 afin qu'une
partie du deuxième champ magnétique directement adjacent au côté arrière 26 de l'aimant en U 20 interagit avec le premier champ
magnétique généré par la pluralité des aimants du stator 68' pour provoquer chaque rotor 12 en rotation autour de l'axe rotor 16. Ceux du métier, vont apprécierez qu'il n'est pas nécessaire
d'avoir exactement trois paires d'aimants en forme de U 32, 32' 32”. Par exemple, le
nombre d'aimants en forme de U 20
(groupes d'est attenant les aimants en forme de U) espacées autour de la
périphérie du rotor 12 peuvent
varier de simplement un unique en forme de U aimant 20 ou peuvent varier en nombre jusqu'à un certain nombre d'aimants
en U 20 uniquement limitée par
l'espace physique à la périphérie du rotor 12. Outre le nombre des aimants en forme de U est
attenant 20 dans un groupe d'aimants
32 peut également varier de 1
jusqu'à un certain nombre d'aimants uniquement limitée par l'espace physique à
la périphérie du rotor 12.
L'incarnation seizième comprend également un ensemble de
palier 84' reliant chaque rotor du 12
à la rainure hélicoïdale 86, le
palier 84' convertir le mouvement
rotatif de chaque rotor 12 sur le
rail 80' unidirectionnel mouvement
linéaire le long du rail 80'. Un pontage 94 relie le palier 84'
des rotors adjacentes 12 ensemble,
additionnant ainsi le mouvement linéaire de chaque rotor 14' le long du rail 80'
pour fournir la force motrice linéaire unidirectionnel. La structure de l'ensemble de palier 84' et la réticulation 94 est montrée dans Fig.11B et Fig.12, est identique à l'ensemble de palier 84' et réticuler 94
décrite pour l'incarnation douzième. En
conséquence, une description de la tringlerie de 84 et la réticulation 94
n'est pas répétée, par souci de concision.
Dans un autre aspect de la seizième réalisation préférée
le moteur 10 peut être configuré
dans un arrangement circulaire semblable à celui de la quatorzième incarnation,
comme illustré sur la Fig.14, sauf
que le stator hélicoïdal 82'
illustré à la Fig.14 est remplacé
par un ou plusieurs stators 50'
espacés autour des rotors 12. Dans ce cas, le terrain de la rotation de la
pluralité des aimants du stator 68'
est ajusté selon la distance de la surface 64
du stator respectif 50' de l'axe de
l'armature de rotation 58 afin que
les aimants en forme de U 20 sur les
rotors 12 restent alignés avec la
pluralité du stator aimants 68'
comme les rotors 12 faire pivoter
autour de l'axe 65 rail 80' et glisser le long du rail 80'.
En conséquence, une description des éléments de la disposition
circulaire de l'incarnation seizième qui sont les mêmes que pour la
configuration de la ligne droite ne sont pas répétés, par souci de brièveté.
HOWARD JOHNSON: MOTEUR À AIMANT PERMANENT
Brevet américain 4 151 431 24th avril 1979 Inventeur: Howard R.
Johnson
MOTEUR À AIMANT PERMANENT
Il s'agit d'un extrait de re-formulation de ce brevet. Il décrit un moteur
alimenté uniquement par des aimants permanents et qui elle est réclamée peut
alimenter un générateur électrique.
RÉSUMÉ
L'invention est réalisée de la méthode d'utiliser
les spins des électrons non appariés dans des matériaux ferromagnétiques et
d'autres comme une source de champs magnétiques produisant une puissance sans
n'importe quel flux d'électrons dans des conducteurs normaux et de moteurs à
aimants permanents pour utiliser cette méthode pour produire une source
d'alimentation. Dans la pratique de l'invention de l'électron non apparié tours
survenant dans les aimants permanents sont utilisés pour produire une source d'alimentation
mobile uniquement par l'intermédiaire des supraconducteurs caractéristiques
d'un aimant permanent, et le flux magnétique créé par les aimants est contrôlé
et concentré pour orienter les forces magnétiques générées de manière à
produire un travail continu utile, telles que le déplacement d'un rotor en ce
qui concerne un stator. Le calendrier et l'orientation des forces magnétiques
sur les composants du rotor et du stator, produits par les aimants permanents
s'effectue par la bonne relation géométrique de ces composants.
CONTEXTE DE L'INVENTION
Moteurs électriques conventionnels utilisent des forces magnétiques pour produire le mouvement de rotation ou linéaire. Moteurs électriques fonctionnent sur le principe que, lorsqu'un conducteur qui transporte un courant se trouve dans un champ magnétique, une force magnétique s'exerce sur elle. Normalement, dans un moteur électrique classique, le rotor, stator ou les deux, sont câblés ainsi que les champs magnétiques créés par des électro-aimants utiliser attraction, répulsion ou les deux types de forces magnétiques, d'imposer une force sur l'armature causant la rotation ou un déplacement linéaire de l'armature. Moteurs électriques conventionnels peuvent employer des aimants permanents soit dans les composants d'armature ou de stator, mais ils nécessitent la création d'un champ électromagnétique à agir sur les aimants permanents, à ce jour. En outre, équipement de commutation est nécessaire pour contrôler la mise sous tension des électro-aimants et l'orientation des champs magnétiques produisant la puissance motrice.
C'est ma conviction que le plein potentiel des forces magnétiques existant dans les aimants permanents non encore reconnu ou utilisé en raison de renseignements incomplets et théorie en ce qui concerne le mouvement atomique survenant dans un aimant permanent. C'est ma conviction qu'une particule atomique actuellement sans nom est associée avec le mouvement des électrons d'un électro-aimant supraconducteur et le flux sans perte des courants dans les aimants permanents. Le flux d'électrons non appariés est similaire dans les deux situations. Cette petite particule est censée être opposée en charge d'un électron et d'être situé perpendiculairement à l'électron en mouvement. Cette particule doit être très petite pour pénétrer tous les éléments connus dans leurs différents États ainsi que leurs composés connus (sauf s'ils sont non appariée électrons qui captureront ces particules dans leurs efforts pour passer à travers).
Les électrons dans des matériaux ferreux diffèrent de ceux observés dans la plupart des éléments, car ils sont non appariés, et étant non appariés ils tournent autour du noyau de telle sorte qu'ils répondent aux champs magnétiques ainsi que la création d'un champ magnétique eux-mêmes. S'ils étaient jumelés, leurs champs magnétiques s'annulent. Cependant, étant non appariés ils créer un champ magnétique mesurable si leurs spins sont orientées dans une seule direction. Les spins sont à angle droit par rapport à leurs champs magnétiques.
Dans les supraconducteurs de niobium, dans un état critique, les lignes de force de magnétique cesse d'être à angle droit. Ce changement doit être due à établir les conditions requises pour les spins électroniques non appariés au lieu du flux d'électrons dans le conducteur, et le fait que les très puissants électroaimants peuvent se former avec les supraconducteurs illustre l'énorme avantage de produire le champ magnétique par les spins des électrons non appariés au lieu du flux d'électrons classiques. Dans un métal supraconducteur, dans lequel la résistance électrique devient supérieure de la résistance de proton dans le métal, le flux se tourne vers les spins des électrons et des particules positives flux parallèle dans le métal de la manière qui se produisent dans un aimant permanent où un puissant flux de particules magnétiques de positifs ou de flux magnétique provoque les électrons non appariés à tourner à angle droit. Dans des conditions cryogéniques supraconduction le gel des cristaux en place rend possible pour les spins de continuer, et à un aimant permanent le grain orientation du matériau magnétique permet à ces tours, leur permettant de poursuivre et provoquant le flux parallèle de flux sur le métal. Dans un supraconducteur, dans un premier temps l'électron circule et en tournant la particule positive ; plus tard, quand la critique, l'inverse se produit, c'est-à-dire, l'électron est en rotation et la particule positive circule à angle droit. Ces particules positives vont enfiler ou travailler leur chemin à travers les spins des électrons présents dans le métal.
Dans un sens, un aimant permanent peut être considéré comme un supraconducteur à température ambiante. C'est un supraconducteur, parce que le flux d'électrons ne cesse pas, et ce flux d'électrons est possible de faire un travail à travers le champ magnétique qu'il crée. Auparavant, cette source d'énergie n'a pas été utilisée parce qu'il n'était pas possible de modifier le flux d'électrons pour accomplir les fonctions de commutation du champ magnétique. Ces fonctions de commutation sont communes dans un moteur électrique classique où le courant électrique est employé pour aligner l'électron beaucoup plu courant dans les pièces polaires de fer et de concentrer le champ magnétique aux endroits appropriés pour donner de la poussée nécessaire pour déplacer l'induit du moteur. Dans un moteur électrique classique, commutation s'effectue par l'utilisation des pinceaux, des commutateurs, courant alternatif ou d'autres moyens.
Afin d'accomplir la fonction de commutation dans
un moteur à aimant permanent, il est nécessaire de protéger les fuites
magnétiques afin qu'il n'apparaîtra pas comme un facteur de déperdition trop
importante aux mauvais endroits. La meilleure méthode pour y parvenir est de
concentrer le flux magnétique dans le lieu où il sera le plus efficace. Chronométrage
et la commutation est possible dans un moteur à aimant permanent en concentrant
le flux et en utilisant la géométrie appropriée du stator et rotor du moteur
pour faire un usage plus efficace des champs magnétiques. Par la combinaison adéquate de matériaux, de
géométrie et de concentration magnétique, il est possible d'obtenir un avantage
mécanique du ratio élevé, supérieur à 100 contre 1, capable de produire la
force motrice continue.
À ma connaissance, précédent travail effectué avec
aimants permanents et motive les dispositifs utilisant des aimants permanents,
n'ont pas atteint le résultat souhaité dans la pratique du concept inventif, et
c'est avec la bonne combinaison de matériaux, géométrie et concentration
magnétique que la présence des spins magnétiques au sein d'un aimant permanent
peut être utilisée comme une force motrice.
RÉSUMÉ DE L'INVENTION
C'est un objet de l'invention d'utiliser le
phénomène de rotation magnétique des électrons non appariés se produisant en
matériau ferromagnétique pour produire le mouvement d'une masse de manière
unidirectionnelle pour quand même un être motivée uniquement par les forces
magnétiques survenant dans les aimants permanents. Types linéaires et
rotationnelles de moteur peuvent être produites. C'est un objet de l'invention
pour fournir la combinaison appropriée des matériaux, géométrie et
concentration magnétique pour alimenter un moteur. Si le moteur est un type
linéaire ou un type rotatif, dans chaque cas le « stator » peut consister en
plusieurs aimants permanents fixés par rapport à l'autre, pour créer une piste.
Cette piste est linéaire pour un moteur linéaire et circulaire pour un moteur
rotatif. Un aimant induit est soigneusement placé au-dessus de cette voie de
sorte qu'un vide d'air existe entre elle et la piste. La longueur de l'aimant
induit est définie par les polonais de polarité opposée, et l'axe long de
l'aimant induit est pointé dans la direction de son mouvement.
Les aimants du stator sont montés afin que les
mêmes poteaux face à l'aimant induit. L'aimant induit a les pôles qui sont tant
attirés et repoussés par le pôle adjacent des aimants du stator, donc les
forces attractives et répulsives agissent sur l'aimant induit pour la faire
bouger.
La force électromotrice continue qui agit sur
l'aimant induit est causée par la relation entre la longueur de l'aimant induit
à la largeur et l'espacement des aimants du stator. Ce ratio d'aimant et des
espacements de l'aimant et avec un espacement de vide d'air acceptable entre
les aimants du stator et induit, produit une force continue qui provoque le
mouvement de l'aimant induit.
Dans la pratique de l'invention, les forces de mouvement de l'aimant induit comparativement aux résultats d'aimants du stator d'une combinaison d'attraction et de répulsion entre les aimants du stator et l'armature. En concentrant les champs magnétiques des aimants du stator et induit la force électromotrice impose l'armature aimant s'intensifie, et les modes de réalisation divulgués, le moyen d'atteindre cette concentration de champ magnétique est divulgué.
Cette méthode se compose d'une plaque de la
perméabilité du champ magnétique intense placé derrière un côté des aimants du
stator et solidement engagé avec eux. Le champ magnétique de l'aimant induit
peut être concentré et orienté directionnellement en s'inclinant l'aimant
induit, et le champ magnétique peut encore être concentré de façonner les
extrémités de pôle de l'aimant induit de concentrer le champ magnétique à une
surface relativement limitée aux extrémités pôle magnétique induit.
Plusieurs aimants induit sont utilisés de préférence, et ceux-ci sont décalés par rapport à l'autre dans le sens leur mouvement. Une telle compensation ou échelonnement des aimants induit distribue les impulsions de la force imposée sur les aimants induit et les résultats dans une application plus fluide des forces à l'aimant induit produisant un mouvement plus lisse et plus uniform de la composante de l'armature.
Dans la
réalisation de rotation du moteur à un aimant permanent de l'invention, les
aimants du stator sont disposées en cercle, et les aimants induit pivoter
autour des aimants du stator. Un
mécanisme est montré qui peut se déplacer de l'induit par rapport au stator et
ceci contrôle l'amplitude des forces magnétiques, modifier la vitesse de
rotation du moteur.
BRÈVE DESCRIPTION DES DESSINS
Les objets et les avantages de l'invention
mentionné plus haut, seront appréciées de la description qui suit et les dessins
annexés :
Fig. 1 représente une
vue schématique du flux d'électrons dans un supraconducteur indiquant les spins
des électrons non appariés,
Fig. 2 est une vue en
coupe d'un supraconducteur dans un état critique, illustrant les spins des
électrons,
Fig. 3 est une vue d'un aimant permanent, illustrant le mouvement des flux à travers elle,
Fig. 4 est une vue en
coupe illustrant le diamètre de l'aimant de la Fig.3,
Fig. 5 est une représentation altitudinale d'une réalisation de moteur linéaire du moteur à un aimant permanent de l'invention illustrant une position de l'aimant induit par rapport à l'aimant du stator, et indiquant les forces magnétiques imposée à l'aimant induit,
Fig. 6 est une vue
semblable à la figure 5 illustrant le déplacement de l'aimant induit par
rapport à l'aimant du stator et l'influence de forces magnétiques à ce sujet à
cet endroit,
Fig. 7 est une outre vue altitudinale semblable à la Fig.5 et Fig.6 illustrant plus de déplacement de l'aimant induit à gauche et l'influence des forces magnétiques à ce sujet,
Fig. 8 est une vue de plan top d'une application linéaire du concept inventif illustrant une paire d'aimants induit en relation liée disposé au-dessus les aimants du stator,
Fig. 9 est une vue diamétrale, altitudinale, sectionnelle d'une réalisation moteur rotative en accord avec l'invention pris le long de la section IX -- IX de Fig.10, et
Fig. 10 est une vue altitudinale de réalisation moteur rotative pris le long de X -- X de la Fig.9.
DESCRIPTION DES MODES DE RÉALISATION
PRÉFÉRÉS
Afin de mieux comprendre la théorie du concept inventif, il est fait référence aux Fig.1 à Fig.4. Fig.1 un supraconducteur 1 est illustré ayant un flux de particules positives représentée par flèche 2, les électrons non appariés du conducteur ferreux 1 spin perpendiculairement au flux de protons dans le conducteur, représentée par la ligne de la spirale et la flèche 3. En accord avec la théorie de l'invention, la filature de la ferreux non appariés résultats d'électrons de la structure atomique des matériaux ferreux et cette particule atomique en rotation est censée être opposée en charge et situé à angle droit avec les électrons mobiles. Il est supposé pour être de très petite taille capable de pénétrer les autres éléments et leurs composés à moins qu'ils ont non appariés des électrons qui captureront ces particules dans leurs efforts pour passer à travers.
L'absence de la résistance des conducteurs dans un
état critique supraconducteur a depuis longtemps été reconnu, et
supraconducteurs ont été utilisées pour produire les électro-aimants de très
haute densité de flux magnétique. Fig.2
représente une coupe transversale d'un supraconducteur critique et les spins
des électrons sont indiqués par les flèches 3. Un aimant permanent peut
être considéré un supraconducteur, que le flux d'électrons qui y sont ne cesse
pas et est sans résistance, et les particules non apparié filage électrique
existent qui, dans la pratique de l'invention, sont utilisés pour produire la
force du moteur. Fig.3
illustre un fer à cheval en forme d'aimant permanent à 4 et le flux magnétique à travers elle est indiqué par des flèches 5, flux magnétique soit du pôle Sud au
pôle Nord et à travers le matériau magnétique. L'électron accumulé tourne se produisant
environ le diamètre de l'aimant, 5
sont représentés à 6 à la Fig.4, et les particules d'électron de
filature tournent à angle droit dans le fer comme le flux traverse le matériau
magnétique.
En utilisant l'électron tourne la théorie des
électrons de matériaux ferreux, c'est possible avec les matériaux
ferromagnétiques, la géométrie et la concentration magnétique à utiliser les
électrons de la filature pour produire une force motrice dans une direction
continue, entraînant ainsi un moteur capable de faire des travaux.
On constate que les modes de réalisation de
moteurs utilisant les concepts de l'invention peuvent prendre de nombreuses
formes, et dans les formes illustrées, les relations de base des composants
sont illustrées afin de divulguer les concepts inventifs et les principes. Les relations de la pluralité des aimants
définissant le stator 10 sont mieux
appréciées de Fig.5 à Fig.8. Les aimants du stator 12 sont de préférence d'une configuration
rectangulaire, Fig.8 et magnétisé
ainsi que les pôles existent dans les grandes surfaces des aimants, comme sera
appréciée des désignations de S (Sud) et N (Nord). Les aimants du stator sont les bords
latéraux 14 et 16 et bords fin 18. Les
aimants du stator sont montés sur une plaque de soutien 20, qui est de préférence d'un métal ayant une perméabilité élevée
aux champs magnétiques et de flux magnétique tel que celui disponible sous la
marque Netic CoNetic vendu par Perfection Mica Company de Chicago, Illinois. Ainsi, la plaque 20 seront éliminées vers le pôle sud des aimants du stator 12 et de préférence dans un engagement
direct avec celle-ci, bien qu'un matériau de collage peut être interposé avec
précision entre les aimants et la plaque afin de localiser et fixer les aimants
sur la plaque et positionner les aimants du stator à l'égard de l'autre.
De préférence, l'espacement entre les aimants du
stator 12 diffère légèrement entre
les aimants du stator adjacent ainsi une variation de l'espacement varie les
forces étant imposées à l'aimant induit à son extrémité, à un moment donné et
donc se traduit par un mouvement plus fluide de l'aimant induit par rapport à
l'aimant du stator. Ainsi, les aimants
du stator donc positionnés par rapport à l'autre définissent une voie 22 ayant un sens longitudinal tel
qu'affiché dans Fig.5 à Fig.8 de gauche à droite.
Dans la Fig.5 à Fig.7, seulement un aimant induit unique 24 est divulgué, tandis que dans la Fig.8, une paire d'aimants de l'induit sont indiquées. Aux
fins de compréhension des concepts de l'invention la description ci-après sera
limitée à l'utilisation de l'aimant induit unique comme sur la Fig.5 à Fig.7.
L'aimant induit est d'une configuration allongée
dans laquelle la longueur s'étend de gauche à droite, Fig.5 et peut être d'une forme de coupe transversale rectangulaire.
Champ magnétique fins de concentration
et de l'orientation, que l'aimant 24
est formé dans une configuration arquée frottée, tel que défini par les
surfaces concaves 26 surfaces
convexes 28 et les pôles sont
définies aux extrémités de l'aimant que seront appréciées de la Fig.5. Pour autre champ magnétique se concentrant
fins. Qu'aux extrémités de l'aimant
induit sont façonnées par des surfaces biseautés 30 pour minimiser la section transversale à l'aimant se termine 32, et le flux magnétique existant entre
les pôles de l'aimant induit sont comme indiqué par les lignes pointillées
légers. De la même manière, les champs
magnétiques de 6 qu'aimants du stator 12
sont indiqués par la lumière noire pointée lignes.
L'aimant induit 24 est maintenue en couple au-dessus de la piste de stator 22 espacée. Cet espacement peut être effectué par l'aimant
induit sur une diapositive, guide ou une piste située au-dessus de l'aimant du
stator de montage, ou l'aimant induit pourrait être monté sur un véhicule à
roues chariot ou diapositive pris en charge sur une surface non magnétique ou
la voie de guidage éliminés entre les aimants du stator et l'aimant induit. Pour clarifier l'illustration, les moyens de
soutenir l'aimant induit 24 ne sont
pas illustré et tel ne : forme aucune partie de l'invention, et il doit être
entendu que les moyens de soutenir l'aimant induit empêche l'aimant induit de
s'éloigner les aimants du stator, ou s'en rapprocher s'y rapportant, mais
permet la libre circulation de l'aimant induit à gauche ou à droite dans une
direction parallèle à la piste 22
définies par les aimants du stator.
On notera que la longueur de l'aimant induit 24 est légèrement supérieure à la
largeur de deux aimants du stator 12
et l'espacement entre eux. Les forces magnétiques agissant sur l'aimant induit
en position de Fig.5 seront forces
de répulsion 34 en raison de la
proximité des comme forces de polarité et les forces d'attraction à 36 en raison de la polarité opposée de
le south pole de l'aimant induit et le pôle Nord de champ des aimants secteur.
La force relative de cette force est représentée par l'épaisseur de la ligne de
force.
La résultante des vecteurs force imposée à
l'aimant induit, comme illustré à la Fig.5
produire un vecteur de force primaire 38
vers la gauche, Fig.5, déplaçant
l'aimant induit 24 vers la gauche. Fig.6
les forces magnétiques agissant sur l'aimant induit sont représentés par les
chiffres de référence même comme dans Fig.5.
Alors que les forces 34 constituent la répulsion forces qui
tendent à déplacer le pôle Nord de l'aimant induit éloigner les aimants du
stator, les forces d'attraction imposée à la south pole de l'aimant induit et
certaines des forces de répulsion, tendent à déplacer l'aimant induit plus à
gauche et que la force résultante 38
continue d'être, vers la gauche, l'aimant induit continuent d'être forcé à
gauche. Fig.7 représente plus de déplacement de l'aimant induit 24 vers la gauche à l'égard de la
position de la Fig.6 et les forces
magnétiques agissant à ce sujet sont représentés par les mêmes chiffres de
référence comme dans la Fig.5 et Fig.6 et l'aimant du stator
continueront à se déplacer vers la gauche, et ce mouvement poursuit à la
longueur de la piste 22 définies par
les aimants du stator 12.
Sur l'aimant induit étant inversé tel que le pôle
nord est placé à la droite comme vu à la Fig.5,
et le pôle sud est positionné à gauche, la direction du mouvement de l'aimant
induit par rapport à l'aimant du stator est vers la droite, et la théorie du
mouvement est identique à celle décrite ci-dessus.
Dans la Fig.8, une pluralité d'aimants induit 40 et 42 sont illustrées qui sont reliés par liens 44. Les aimants induit sont
d'une forme et une configuration identique à celle de l'incarnation de la Fig.5, mais les aimants sont décalés
par rapport à l'autre dans la direction du mouvement de l'aimant, c'est-à-dire,
la direction de la piste 22 définies
par les aimants du stator 12. En échelonnant ainsi une pluralité d'aimants
induit qu'un mouvement plus fluide des aimants induit interconnectés est
produit par rapport à lorsque vous utilisez un aimant induit unique car il y a
variation dans les forces agissant sur chaque aimant induit en se déplaçant
au-dessus de la piste 22, sous
l'effet des forces magnétiques imposée à ce sujet. L'utilisation de plusieurs aimants induit
tend à “ lisser “ l'application des forces imposées aux aimants induit lié, ce
qui entraîne un mouvement plus fluide de l'ensemble magnétique inducteur. Bien
sûr, n'importe quel nombre d'armature aimants peut-être être interconnecté,
limitée seulement par la largeur de la piste d'aimant du stator 22.
Dans la Fig.9 et Fig.10 une incarnation rotative qui englobe les concepts inventifs sont illustrée. Dans cette réalisation, le principe de fonctionnement est identique à celui décrit ci-dessus, mais l'orientation des aimants du stator et l'armature est telle que la rotation des aimants induit est produite sur un axe, et non un mouvement linéaire étant atteint.
Dans la Fig.9 et Fig.10 une base est représentée à 46 agissant comme un support pour un membre de stator 48.
Le membre de stator 48 est
fait d'un matériau non magnétique, comme plastique synthétique, en aluminium ou
autre. Le stator comprend une surface cylindrique ayant un axe de 50, et un trou fileté 52 concentriquement défini dans le
stator. Le stator comporte une rainure
annulaire 54 recevant un manchon
annulaire 56 du matériau de
perméabilité de champ magnétique intense comme Co-Netic Netic et une pluralité
d'aimants du stator 58 sont apposés
sur le manchon 56 relation
circonférentielle en ressortira dans Fig.10.
De préférence, les aimants du stator 58 sont forment avec des côtés radiales
convergentes au point d'être d'une configuration de coin ayant une surface
intérieure incurvée engageant les manches 56
et une surface convexe pole 60.
L'armature 62,
dans la réalisation de l'illustré, est d'une configuration bombée, ayant une
partie web radial et une portion axiale qui se prolongent 64. L'armature 62 est formé d'un matériau non
magnétique, et une ceinture annulaire recevant rainure 66 y est définie pour recevoir une ceinture pour la puissance
d'émission de l'armature d'un générateur, ou autre pouvoir consommer le
dispositif. Trois aimants induit 68 sont montés sur la partie de
l'armature 64, et ces aimants sont d'une
configuration semblable à la configuration d'aimant induit de la Fig.5 à Fig.7.
Les aimants 68 sont décalés par rapport à l'autre en direction circonférentielle dans laquelle les aimants ne soient pas placés exactement 120 degrés dehors, mais au lieu de cela, une légère sidérants angulaire des aimants induit est souhaitable pour “ lisser “ les forces magnétiques étant imposées à l'armature à la suite les forces magnétiques étant imposées simultanément chacun des aimants induit. L'échelonnement des aimants induit 68 en direction circonférentielle produit le même effet que l'échelonnement des aimants induit 40 et 42 comme indiqué dans la Fig.8.
L'armature 62 est monté sur une tige filetée 70 par roulements antifriction 72, et l'arbre 70 est vissée dans l'alésage du stator fileté 52 et peut être tourné par le bouton 74. De cette manière, rotation du bouton de 74 et arbre 70, déplace axialement l'armature 62 en ce qui concerne les aimants du stator 58 et cette volonté de déplacement axial très l'ampleur des forces magnétiques sont imposées les aimants induit 68 par les aimants du stator, contrôlant ainsi la vitesse de rotation de l'induit. On notera de Figs. 4 à 7, 9 et 10, une lame d'air existe entre les aimants de l'armature et les aimants du stator et la dimension de cet espacement, effets l'ampleur des forces imposées à l'aimant induit ou les aimants. Si la distance entre les aimants de l'armature et les aimants du stator est réduite les forces imposées sur les aimants induit par les aimants du stator sont augmentés, et le vecteur de force résultante 8 tend à supplanter les aimants induit dans leur chemin d'accès de mouvement augmente. Toutefois, la diminution de l'espacement entre les aimants induit et le stator crée une “ pulsation “ dans le mouvement des aimants induit qui est répréhensible, mais peut être, dans une certaine mesure, réduite à l'aide d'une pluralité d'aimants induit. Augmenter la distance entre les aimants induit et le stator réduit la tendance de la pulsation de l'aimant induit, mais réduit également l'ampleur des forces magnétiques sont imposées les aimants induit. Ainsi, l'espacement plus efficace entre les aimants induit et le stator est que l'espacement qui produit le maximum force vector dans la direction du mouvement d'aimant induit, avec une création minimale de la pulsation répréhensible.
Dans les modes
de réalisation divulguées la plaque haute perméabilité 20 et manches 56 sont
indiqués pour concentrer le champ magnétique des aimants du stator, et les
aimants induit sont courbés et ont façonné les extrémités à des fins de
concentration de champ magnétique. Alors que telle concentration de champ
magnétique, résultat de forces supérieures imposées les aimants induit pour
donné des intensités de l'aimant, il n'est pas prévu que les concepts inventifs
se limite à l'utilisation de ce champ magnétique se concentrant les moyens.
Que sera appréciée la description ci-dessus de
l'invention, le mouvement de l'aimant induit ou aimants résulte de la relation
décrite des composants. La longueur des aimants induit par rapport à la largeur
de l'espacement entre eux, la dimension de l'entrefer et la configuration du
champ magnétique et les aimants du stator combiné, produire le résultat
souhaité et le mouvement. Les concepts
inventifs peuvent être pratiquées même si ces relations peuvent varier dans des
limites non encore définis et l'invention est destinée à englober toutes les
relations dimensionnelles qui atteint le but recherché du mouvement de
l'armature. A titre d'exemple, en ce qui
concerne les Fig.1 à Fig.7, les dimensions suivantes ont été
utilisées dans un prototype d'exploitation :
La longueur de l'aimant induit 24 est 3,125 pouces, les aimants du
stator 12 sont 1 pouce (25 mm) de
largeur, épaisseur de 0,25 pouce et 4 pouces (100 mm) de long et à grains
orientés. L'entrefer entre les pôles de
l'aimant de l'armature et les aimants du stator est environ 1,5 pouces et
l'espacement entre les aimants du stator est approximativement 0,5 pouces.
En vigueur, les aimants du stator définissent une
piste de champ magnétique d'une polarité unique interrompue transversalement
aux endroits éclaircis par les champs magnétiques produits par les lignes de
force existant entre les pôles des aimants du stator et la force
unidirectionnelle exercée sur l'aimant induit résulte de la répulsion et
l'attraction des forces existantes que l'aimant induit traverse cette piste de
champ magnétique.
Il doit être entendu que le concept inventif embrasse un arrangement dans lequel le composant d'aimant induit est stationnaire et l'assemblage du stator est pris en charge pour le mouvement et constitue le composant mobile, et autres variantes du concept inventif ressortira de personnes versées dans l'art sans s'écarter de son champ d'application. Dans le présent document le terme “ piste “ vise à inclure des arrangements linéaires et circulaires des aimants statiques, et la “ direction “ ou “ longueur “ de la piste est ce sens parallèle ou concentrique à la direction prévue du mouvement aimant induit.
HAROLD EWING : LE GÉNÉRATEUR
D'ÉLECTRICITÉ " CARROUSEL "
Brevet US 5
625 241 29 avril
1997 Inventeur:
Harold E. Ewing et al.
LE GÉNÉRATEUR D'ÉLECTRICITÉ " CARROUSEL "
Il s'agit d'une forme remaniée
extrait ce brevet qui présente un compact, autoalimenté, combinée à un aimant
permanent moteur / générateur électrique. Il y a un peu d'information supplémentaire à la fin du présent document.
RÉSUMÉ
Un générateur à aimant permanent ou le moteur
ayant des bobines fixes positionnées dans un cercle, un rotor sur lequel sont
montés aimants permanents regroupés en secteurs et positionné pour déplacer
près les bobines et à un carrousel transportant des groupes correspondants des
aimants permanents à travers les centres des bobines, les films de carrousel
avec le rotor en vertu de son être par magnétisme accouplées à elle.
Inventeurs :
Ewing, Harold E. (
Chapman, Russell R. (
Porter, David R. (
Cessionnaire :
Energy Research Corporation (
Références de brevet US :
3610974 Oct, 1971 Kenyon 310/49.
4547713 Oct, 1985 Langley et al. 318/254.
5117142 May, 1992 Von Zweygbergk 310/156.
5289072 Feb, 1994 Lange 310/266.
5293093 Mar, 1994 Warner 310/254.
5304883 Apr, 1994 Denk 310/180.
CONTEXTE DE
L'INVENTION
Il existe de nombreuses applications pour petits générateurs électriques en cotes de quelques kilowatts ou moins. Les exemples incluent des sources d'alimentation électrique pour l'éclairage d'urgence dans les bâtiments commerciaux et résidentiels, des sources d'énergie pour les emplacements distants, tels que des chalets de montagne et des sources d'énergie portable pour camping-cars, bateaux de plaisance, etc..
Dans toutes ces applications, fiabilité du système est une préoccupation majeure. Parce que le système d'alimentation est susceptible de rester inactif pendant de longues périodes de temps sans l'avantage d'un entretien périodique, et parce que le propriétaire-exploitant est souvent inexpérimenté dans l'entretien et le fonctionnement de ces équipements, le niveau de fiabilité souhaité ne peut être atteint grâce à la simplicité du système et l'élimination de ces composants comme les piles ou autres sources d'énergie secondaire qui sont couramment employées pour l'excitation de champ de générateur.
Une autre caractéristique importante pour de tels équipements générateurs est miniaturisation particulièrement dans le cas des appareils portatifs. Il est important d'être en mesure de produire le niveau requis de puissance dans un relativement petit générateur.
Ces deux exigences sont traitées dans la présente
invention grâce à une adaptation du roman du générateur à aimant permanent ou
magnéto dans une conception qui se prête à une opération de haute fréquence
comme un moyen d'optimiser le rendement de puissance par unité de volume.
DESCRIPTION DE L'ÉTAT DE LA TECHNIQUE
Générateurs à aimant permanent ou magnétos ont été
employés largement pendant de nombreuses années. Les premières applications de
ces générateurs comprennent la fourniture de courant électrique pour bougies
d'allumage dans les automobiles et les avions. Premiers téléphones utilisés
magnétos pour obtenir de l'énergie électrique pour la sonnerie. L'automobile de
Ford modèle T a également utilisé des magnétos pour alimenter ses lumières
électriques.
La présente invention diffère des magnétos d'état
de la technique en termes de sa nouvelle structure physique dans lequel une
multitude d'aimants permanents et des enroulements électriques sont disposés
d'une façon qui permet de faire fonctionner de la haute-vitesse/haute fréquence
comme un moyen pour répondre à l'exigence de la miniaturisation. En outre, la
conception est renforcée par l'utilisation d'un carrousel qui transporte une
multiplicité d'aimants source champ par les centres des enroulements fixes
électriques dont la tension générée est ainsi induite.
RÉSUMÉ DE L'INVENTION
Conformément à l'invention revendiquée, un
générateur électrique améliorée à un aimant permanent est doté d'une capacité
permettant de présenter un niveau relativement élevé de puissance de sortie
d'une structure compacte. L'incorporation d'un carrousel pour le transport des
aimants champ primaires à travers les enroulements électriques où survient
l'induction améliore l'intensité de champ dans les endroits critiques de
génération.
Il est, par conséquent, un objet de cette
invention de fournir un générateur à aimant permanent améliorés ou magnéto pour
la production d'énergie électrique. Un autre objet de cette invention est de
fournir, dans un tel générateur, un niveau relativement élevé de l'énergie
électrique d'une structure compacte. Un autre objet de cette invention est
d'atteindre un tel niveau d'alimentation électrique en raison de l'opération
haute rotation vitesse et à haute fréquence dont est capable le générateur de
l'invention.
Un autre objet de cette invention est de fournir
une telle capacité de haute fréquence grâce à l'utilisation d'une structure de
champ roman dans lequel les aimants permanents primaires sont portés par les
centres des bobinages d'induction du générateur par un carrousel.
Un objet encore plus loin de cette invention est
de fournir un moyen pour conduire le carrousel sans l'aide de couplage
mécanique mais plutôt en vertu de couplage magnétique entre autres aimants MUS
mécaniquement et ceux montés sur le carrousel.
Encore un autre objet de cette invention est de fournir, dans un tel
générateur améliorée, une densité suffisamment élevée de champ magnétique dans
les endroits critiques à génération de tension sans avoir recours à
l'utilisation de tôles magnétiques ou autres médias pour canaliser le champ
magnétique.
Autres objets un avantages de l'invention seront apercevra que la
description qui suit le produit et les caractéristiques de la nouveauté qui caractérisent
l'invention vont être soulignés avec particularité dans les revendications
annexées à et faisant partie de cette spécification.
BRÈVE DESCRIPTION DES DESSINS
La présente invention peut-être être plus facilement décrite par référence
aux dessins qui l'accompagne, dans lequel :
Fig.1 est une vue en
perspective simplifiée du groupe électrogène carrousel de l'invention ;
Fig.2 est une vue en
coupe de la Fig.1 prises le long de
la ligne 2- 2 ;
Fig.3 est une vue en
coupe de la génératrice de la Fig.1
et Fig.2 prises le long de la ligne 3--3 de Fig.2;
Fig.4 est une vue en
coupe de la Fig.3 prises le long de
la ligne 4- 4 ;
Fig.5 une vue en
perspective partielle montre l'orientation d'un groupe d'aimants permanents
dans un secteur de vingt degrés de la génératrice de l'invention tel qu'affiché
dans le sens de la flèche 5 de Fig.3 ;

Fig.6 est une illustration de la disposition physique des enroulements électriques et aimants permanents dans le générateur de l'invention tel qu'affiché dans le sens de la flèche 6 en Fig.1 ;
Fig.7 est une forme d'onde montrant des liens de flux pour un enroulement donné en fonction de la position de rotation de l'enroulement par rapport à l'aimant permanent ;

Fig.8 est un diagramme schématique montrant la bonne connexion des enroulements du générateur pour une configuration actuelle haute de basse tension du générateur ;

Fig.9 est un diagramme schématique montrant une connexion série de bobines de générateur pour une configuration de basse tension actuelle et de haute ;
Fig.10 est un diagramme schématique montrant une connexion série/parallèle des enroulements de générateur à courant intermédiaire et au fonctionnement de la tension ;
Fig.11 est une présentation de la perspective d'une configuration d'aimant de mis à jour le carrousel employée dans une deuxième réalisation de l'invention ;
Fig.12A et Fig.12B afficher les vues supérieures et inférieures des aimants carrousel de Fig.11;
Fig.13 est une vue en
coupe de la configuration de mis à jour l'aimant de Fig.11 prise le long de la ligne 13--13 avec d'autres caractéristiques de la structure mis à jour le
carrousel aussi montré ;
Fig.14 est une modification de la structure de carrousel, illustrée à la Fig.1-13, dans lequel un aimant de carrousel quatrième est positionné à chaque station ; et

Fig.15 illustre l'utilisation de l'appareil revendiquée comme une source d'alimentation de courant pulsé.
DESCRIPTION DE LA RÉALISATION PRÉFÉRÉE
Se référant plus particulièrement aux dessins de
caractères de référence, la Fig.1
montre les proportions extérieures d'un générateur électrique de carrousel 10 de l'invention. Comme illustré à la Fig.1, générateur 10 est
encadré par un logement 11 avec
montage pieds 12 propres à garantir
la génératrice sur une plan de surface, 13.
La surface 13 est de préférence horizontale, comme illustré à la Fig.1.
Logement 11 offre les proportions d'un cylindre
court. Un arbre de transmission 14 s'étend selon l'axe du logement 11 grâce à un roulement 15. La puissance électrique du générateur est mis
en évidence par un câble 16.
La vue en coupe de la Fig.2 montre les éléments d'actifs incorporés dans un secteur de
vingt degrés du stator et d'un secteur de vingt degrés du rotor.
Dans la première de la mise en œuvre de
l'invention, il y a dix-huit secteurs stator identique, chaque incorporant un
enroulement ou bobine 17 enroulé sur
une bobine rectangulaire cadre ou de la canette. Bobine 17
est maintenue par un cadre de stator 18
qui peut aussi servir d'une paroi extérieure du cadre 11.
Le rotor est également divisé en dix-huit
secteurs, dont neuf incorporer trois aimants permanents chacun, y compris un
aimant rotor intérieur 19, un aimant
du rotor supérieur 21 et un aimant
de rotor inférieur 22. Tous trois de ces aimants ont leurs pôles Sud
face à la bobine 17, et tous trois
sont montés directement sur le cadre du rotor 23 qui est fixée directement sur l'arbre d'entraînement 14.
Les neuf
autres secteurs du rotor sont vides, c'est-à-dire qu'ils ne sont pas remplies
avec des aimants. Les secteurs non peuplées sont alternées avec les
secteurs peuplés, afin que les secteurs peuplés adjacents sont séparés par un
secteur inhabité comme sur la Fig.3
et Fig.6.
S'agissant encore de la Fig.2, générateur 10
intègre également un carrousel de 24.
Le carrousel est composé de neuf paires
d'aimants carrousel 25 serrés entre
les anneaux de fixation supérieure et inférieure 26 et 27,
respectivement. L'anneau de retenue
inférieure 27 repose à l'intérieur
d'une voie de roulement d'air 28 qui
est fixée au stator 18 à l'intérieur
de la canette de bobine 17. Les passages d'air (non montrés) laisser
pénétrer d'air dans l'espace entre la surface inférieure de l'anneau de 27 et le dessus ou à l'intérieur de la
surface du canal 28. Cet arrangement comprend un air portant qui
permet carrousel 24 de tourner
librement dans les bobines 17 sur
l'axe de rotation 29 du cadre du
rotor 23.
Carrousel 24
est également divisé en 18 secteurs de vingt degrés, y compris neuf secteurs
peuplés entrecoupées de neuf secteurs inhabitées dans une séquence
d'alternance. Chacun des neuf secteurs
peuplés intègre une paire d'aimants de carrousel tel que décrit à l'alinéa
précédent.
Les relations géométriques entre les aimants de
rotor, les aimants du carrousel et les serpentins, est précisée par la Fig.3, Fig.4 et Fig.5. Dans chacune des trois figures, au centre de
chacun des secteurs peuplés du rotor est montré aligné avec le centre d'une
bobine de 17. Chaque secteur peuplé de carrousel qui est
magnétiquement verrouillé en position avec un secteur peuplé de rotor, est donc
également alignée sur une bobine 17.
Dans une
application rapide de l'invention, les dimensions et l'espacement des aimants
de rotor 19, 21 et 22 et aimants de
carrousel, 25A et 25B de couples aimant de carrousel 25 étaient comme illustré à la Fig.5.
Chacun des aimants du rotor 19, 21 et 22, mesurée d'un pouce par
deux pouces par un demi-pouce avec les pôles Nord et Sud à opposé un pouce par
pouce deux visages. Chacun des aimants
carrousel 25A et 25B mesurée deux pouces par deux pouces
par un demi-pouce avec les pôles Nord et Sud à faces opposées de deux pouces
par 2 pouces. Les aimants ont été
extraites de Magnet ventes et fabrication, Culver City, en Californie. Les aimants de carrousel faisaient partie
No.35NE2812832 ; les aimants de rotor ont été des pièces sur mesure d'une
résistance équivalente (MMF), mais la moitié la section transversale des
aimants carrousel.
Prend en charge de la bobine et d'autres membres
fixes situés à l'intérieur des modèles de champ magnétique sont fabriqués à
partir de plastique Delrin ou téflon ou équivalent des matériaux. L'utilisation de l'aluminium ou autres métaux
introduire des pertes de courant de Foucault et à des frictions excessives de
cas.
Comme indiqué dans la Fig.5, carrousel aimants 25A
et 25B ont positionnés sur le bord,
parallèle entre eux, leurs pôles Nord face à l'autre et espacées d'un pouce de
distance. Lorsqu'on regarde directement
au-dessus des aimants de carrousel, l'espace entre les deux aimants 25A et 25B apparaît comme un un pouce par rectangle de deux pouces. Lorsque le couple aimant de carrousel 25 est parfaitement verrouillé en
position magnétique, aimant rotor supérieur 21 est directement au-dessus de ce un pouce par rectangle de deux
pouces, inférieure du rotor aimant 22
se trouve directement en dessous et leur un pouce par pouce deux faces sont
alignés directement avec elle, le pôle sud des deux aimants 21 et 22 en face de l'autre.
De la même manière, lorsqu'on regarde l'axe de
rotation du générateur 10, l'espace
entre les aimants du Carrousel de 25A
et 25B nouveau apparaît comme un un
pouce par rectangle de deux pouces, et ce rectangle est aligné avec l'un pouce
est dominée par deux pouces d'aimant 19,
le pôle sud de l'aimant 19 face à la
paire d'aimant de carrousel 25.
Aimants de rotor 19, 21 et 22 sont placés aussi près que possible à des aimants
carrousel 25A et 25B, tout en permettant le passage de
bobine 17 sur et autour de l'aimant
du carrousel et par le biais de l'espace entre les aimants du carrousel et les
aimants de rotor.
Dans un générateur électrique, la tension induite
dans l'enroulement de la génératrice est proportionnelle au produit du nombre
de tours dans l'enroulement et le taux de variation des liens de flux qui est
produit comme l'enroulement est tournée à travers le champ magnétique. Un examen des modèles de champ magnétique est
donc essentiels à la compréhension du fonctionnement du générateur.
Dans générateur de flux magnétique émanant des pôles Nord d'aimants carrousel 10, 25A et 25B passent à travers les aimants de rotor et puis retournent vers les pôles sud des aimants carrousel. Le domaine du flux total est donc entraîné par la MMF combinée (force magnétomotrice) du carrousel et aimants de champ tandis que les modèles de flux sont déterminés par l'orientation des aimants du rotor et carrousel.
Le modèle de flux entre carrousel aimants 25A et 25B et l'upper et lower rotor aimants 21 et 22 est illustré à la Fig.4. Lignes de flux magnétique 31 du pôle Nord de l'aimant de carrousel 25A s'étendent jusqu'au pôle sud de l'aimant du rotor supérieur 21, traverser aimant 21 et retour sous forme de lignes 31' au pôle sud de l'aimant 25A. Lignes 33, également du pôle Nord de l'aimant 25A s'étendent jusqu'au pôle sud de l'aimant de rotor inférieur 22, traverser aimant 22 et retour au pôle sud de l'aimant 25A en tant que lignes 33'. De même, les lignes 32 et 34 du pôle Nord de l'aimant 25B passent par aimants, 21 et 22, respectivement et retourner que les lignes 32' et 34' jusqu'au pôle sud de l'aimant 25B. Les liens de flux produites en bobine 17 par lignes émanant d'aimant carrousel 25A sont de sens opposé à celles émanant d'aimant carrousel 25B. Parce que la tension induite est une fonction du taux de change dans les liens du flux net, il est important de reconnaître cette différence en direction.
Fig.6 montre une tendance similaire de flux pour le flux entre les aimants carrousel 25A et 25B et aimant rotor intérieur 19. Encore une fois les lignes émanant d'aimant carrousel 25A et passant par l'aimant du rotor 19 produisent les liens de flux dans une bobine 17 qui sont opposées dans le sens de celles produites par les lignes d'aimant 25B.
L'arrangement des aimants carrousel avec les pôles Nord face à face tend à limiter et canaliser le flux dans le chemin d'accès souhaité. Cette entente remplace la fonction des barreaux magnétiques ou contre-collages des générateurs plus traditionnels.
Les liens de flux produits par des aimants 25A et 25B sont contraire au sens indépendamment de la position de
rotation de la bobine 17, y compris
le cas où bobine 17 est aligné avec
les aimants carrousel et rotor ainsi que pour les bobines mêmes lorsqu'elles
sont alignées avec un secteur inhabité du rotor.
Prenant en compte les modèles de flux de Fig.4 et Fig.6 et reconnaissant les conditions adverses de sens vient d'être
décrites, liens de flux net pour une bobine donnée 17 sont déduites comme sur la
Fig. 7.
Dans la Fig.7,
net liens de flux (bobine-tours x lignes) sont tracées en fonction de la
position de la bobine en degrés. Position de la bobine est définie ici comme la
position de l'axe 35 de bobine 17 par rapport à l'échelle angulaire
indiquée en degrés de la Fig.6.
(Notez que la bobine est stationnaire et l'échelle est fixée sur le rotor. Comme le rotor tourne dans le sens horaire, la
position relative de la bobine 17
progresse de zéro à dix à vingt degrés etc.).
À une position relative bobine de dix degrés, la
bobine est centrée entre les aimants 25A
et 25B. En
supposant que les modèles de flux symétriques pour les deux aimants, les liens
de flux d'un aimant annuler exactement les liens de flux de l'autre afin que le
flux net liens sont zéro. Comme bobine
relative position se déplace à la droite, les liens de diminution aimant 25A et ceux d'aimant 25B augmentation afin que les liens de
flux net s'accumuler entre zéro et passe par une valeur négative maximale à un
moment donné entre dix et vingt degrés. Après
avoir atteint la valeur maximale négative, les liens de flux diminuent, passant
par zéro à 30 degrés (bobine 17
étant au centre d'un secteur inhabité du rotor) et puis augmente jusqu'à un
maximum de positif à un certain moment juste au-delà de 60 degrés. Cette
variation cyclique peut se répéter selon la bobine est soumise successivement à
des champs de secteurs peuplés et inhabitée du rotor.
À mesure que le rotor est entraîné par rotation,
liens flux net pour toutes les batteries de dix-huit sont modifiés à un taux
qui est déterminé par le modèle de flux de décrire en combinaison avec la
vitesse de rotation du rotor. Tension
instantanée induite dans la bobine 17
est fonction de la pente de la courbe montre Fig.7 et la vitesse de rotor et les changements de polarité tension
comme la pente de la courbe alterne entre positif et négative.
Il est important de noter ici qu'une bobine placée
à dix degrés est exposée à une pente négative, tandis que la bobine adjacente
est exposée à une pente positive. Les
polarités des tensions induites dans les deux bobines adjacentes sont donc
opposées. Pour les séries ou les
connexions parallèles de bobines paires et impaires, cet écart de polarité peut
être corrigé en installant l'impair et même numéroté de façon opposée bobines
(cotes tourné fin pour fin par rapport aux evens) ou en inversant commencent et
se terminent les connexions de bizarre par rapport aux bobines de paires. Ou l'autre de ces mesures sera rendu tout
additif de tensions bobine si nécessaire pour les connexions parallèles et de
série. À moins que les modèles de champ
pour les secteurs peuplés et inhabitées sont presque symétriques, cependant,
les tensions induites dans les bobines paires et impaires auront différentes
formes d'onde. Cette différence n'est pas
corrigée par les revirements de la bobine ou inverses connexions abordées dans
le paragraphe précédent. À moins que les
formes d'onde de tension sont presque les mêmes, circulation des courants
s'écoulera entre spires même et impaires. Ces courants de circulation réduira
l'efficacité du générateur.
Pour éviter ces courants circulants et la perte correspondante dans l'efficacité des modèles de champ non symétriques et formes d'onde de tension inégalée de fonctionnement, les connexions série-parallèle de Fig.8 peuvent être employées dans une configuration à haute tension, basse tension du générateur. Si les dix-huit bobines sont numérotés dans l'ordre d'un à dix-huit bobines selon la position sur le stator, toutes les paires bobines sont branchées en parallèle, toutes les batteries impaires sont branchées en parallèle, et les deux groupes parallèles bobine sont connectées en série, comme le montre avec inversion de polarité pour un seul groupe afin que les tensions seront en phase par rapport au câble de sortie 16.
Pour une configuration de basse tension, haute tension, le raccordement en série de toutes les batteries peut-être être employé comme illustré à la Fig.9. Dans ce cas, il est seulement nécessaire de corriger la différence de polarité entre les spires numérotés pairs et impairs. Comme mentionné précédemment, cela peut être accompli par le biais de départ opposé et terminer les connexions pour bobines de pairs et impairs ou en installant des bobines de rechange inversées, fin pour la fin.
Pour les configurations de tension et de courant intermédiaire, diverses possibilités de branchements série-parallèle peuvent être employées. Fig.10, par exemple, montre trois groupes de six bobines que tous raccordés en série. Courants de circulation sera évité tant que les bobines de paires ne sont pas connectés en parallèle avec les bobines impaires. Raccordement en parallèle de reliées en série des paires/impaire comme indiqué est permis car les formes d'onde des paires série doivent correspondre très soigneusement.
Dans un autre
mode de réalisation de l'invention, les deux aimants grand carrousel (deux
pouces par deux pouces) sont remplacés par trois aimants plus petits, comme
illustré à la Fig.11, Fig.12 et Fig.13. Les aimants de trois carrousel comportent un
aimant intérieur carrousel 39, un
aimant de carrousel supérieure 41 et
un aimant de carrousel inférieur 42
disposés dans une configuration en U qui correspond à la configuration en forme
de U, les aimants de rotor, 19, 21 et 22.
Comme dans le cas de la première
incarnation, les aimants de rotor et carrousel sont présents que dans les
autres secteurs du générateur.
Les extrémités
des aimants carrousel sont biseautées afin de permettre un arrangement plus
compact des trois aimants. Comme indiqué sur la Fig.12, chaque aimant mesure un pouce par deux pouces par un demi
pouce d'épaisseur. Le pôle Sud occupe la
partie biseautée un pouce est dominée par deux pouces et le pôle nord est à la
face opposée.
La structure de mis à jour le carrousel 24' comme sur la Fig.13 comprend un carrousel supérieur portant plaque 43, une plaque de roulement inférieure
carrousel 44, une paroi cylindrique
extérieure 45 et une paroi
cylindrique interne 46. Les paliers supérieur et inférieur plaques 43 et 44 s'accoupler avec la partie
supérieure et inférieure des éléments portants 47 et 48, respectivement, qui sont fixes et sécurisé à l'intérieur
de la forme des bobines 17. Plaques
de roulement 43 et 44 sont formés
pour fournir des canaux d'aération 49
qui servent de paliers à air pour support de rotation du carrousel 24'.
Les plaques de roulement
également percées pour recevoir les bords supérieur et inférieur 51, des parois cylindriques, 45 et 46.
La structure de mis à jour le carrousel 24' offre un certain nombre d'avantages par rapport à la première incarnation. La configuration correspondante aimant le carrousel et le rotor fournit plus serré et plus sûr de couplage entre le rotor et le carrousel. Les petits aimants de carrousel fournissent également une réduction significative du poids carrousel. Cela s'est avéré bénéfique par rapport à l'appui de rotation sans heurt et efficace du carrousel.
La
modification de la structure du carrousel tel que décrit dans les paragraphes
qui précèdent peut être prise un peu plus loin avec l'ajout d'un quatrième
aimant de carrousel 52 à chaque
station, comme illustré sur la Fig.14. Visage
quatre carrousel aimants, 39, 41, 42 et
52 constituent aujourd'hui un cadre carré avec chacune des faces magnétique
(pôle Nord) face à un correspondant à l'intérieur de la bobine 17. Aimants de carrousel pour cette modification
peuvent être à nouveau comme indiqué sur la Fig.12. Un aimant rotor
supplémentaires 53 peut-être
également être ajouté comme indiqué, en alignement avec l'aimant de carrousel 52. Ces modifications supplémentaires plus loin
améliorent le modèle de champ et le degré de couplage entre le rotor et le
carrousel.
Le générateur électrique carrousel de l'invention
est particulièrement bien adapté à la haute vitesse, haute fréquence de
fonctionnement où la vitesse élevée compense les plus faibles densités de flux
que celui qui pourrait être obtenu avec un support magnétique pour le champ
dans les serpentins de générateur de routage. Pour de nombreuses applications, telles que
l'éclairage de secours, la haute fréquence est aussi avantageuse. Éclairage fluorescent, par exemple, est plus
efficace en termes de lumens par watt et les ballasts sont plus petits dans les
hautes fréquences.
Alors que la présente invention a été dirigée vers
la fourniture d'une génératrice compacte pour des applications spécialisées
générateur, il est également possible d'utiliser l'appareil comme un moteur en
appliquant une source de tension alternative appropriée à câble 16 et accouplement arbre de
transmission 14 à une charge.
Il est
également possible d'utiliser l'appareil de l'invention considérée comme un
moteur en utilisant une source d'alimentation de courant continu pulsé. Un
système de contrôle 55 pour fournir
telle opération est illustré dans la Fig.15.
Sont incorporés dans le système de
contrôle 55, un capteur de position
du rotor S, un automate programmable
56, un circuit de commande de
puissance 57 et un potentiomètre P.
Basé sur des signaux provenant du capteur S, le contrôleur 56 détermine le moment approprié pour l'excitation de la bobine
assurer le couple maximal et bon fonctionnement. Cela implique la détermination de la position
optimale du rotor et le carrousel à l'ouverture et à la fin de l'excitation de
la bobine. Pour le bon fonctionnement et
un couple maximal, la force développée par les domaines interdépendants des
aimants et les bobines excités devrait être unidirectionnelle dans la mesure du
possible.
En général, la bobine est excitée pour seulement
17,5 degrés ou moins pendant chaque 40 degrés de rotation du rotor.
Le signal de sortie 58 du contrôleur 56 est
un signal binaire (haut ou bas) qui est interprété comme une commande SUR et DE
pour l'excitation de la bobine.
Le circuit de commande de puissance intègre un commutateur à l'état solide sous la forme d'un transistor de puissance ou un MOSFET. Il répond aux signaux 58 en tournant à l'état solide interrupteur SUR et DE pour déclenche et arrête l'excitation de la bobine. Amplitude de tension instantanée fourni sur les bobines pendant l'excitation est contrôlée au moyen du potentiomètre P. Moteur vitesse et couple sont donc sensibles aux réglages du potentiomètre.
Le dispositif est également adaptable à l'exploitation comme un moteur à l'aide d'un collecteur et les balais pour le contrôle de l'excitation de la bobine. Dans ce cas, le collecteur et les balais remplacent l'automate programmable et le circuit de commande de puissance comme les moyens permettant d'obtenir l'excitation de CC pulsée. Cette approche est moins flexible mais peut-être plus efficace que le système de contrôle programmable décrit précédemment.
PAVEL IMRIS: GÉNÉRATEUR OPTIQUE
Brevet US 3,781,601 25 Décembre 1973 Inventeur: Pavel Imris
OPTIQUE GÉNÉRATEUR D'UN CHAMP ÉLECTROSTATIQUE AYANT UNE OSCILLATION
LONGITUDINALE
À DES FRÉQUENCES DE LA LUMIÈRE POUR UNE UTILISATION DANS UN CIRCUIT
ÉLECTRIQUE
Veuillez noter qu'il s'agit d'un extrait de
re-formulation de ce brevet. Il décrit un tube rempli de gaz qui permet de
nombreux tubes fluorescents standards de 40 watts peut être alimenté à l'aide de
moins de 1 watt de puissance chaque.
RÉSUMÉ
Un générateur d'optique, d'un champ électrostatique à des fréquences de la
lumière pour une utilisation dans un circuit électrique, le générateur ayant
une paire d'électrodes espacées-apart dans un tube rempli de gaz de quartz
verre ou matériau similaire avec cap au moins un condensateur ou une plaque
adjacente à une électrode et un diélectrique rempli récipient contenant le
tube, le générateur d'augmenter considérablement le rendement électrique du
circuit électrique.
CONTEXTE DE L'INVENTION
Cette invention se rapporte à des circuits
électriques améliorées et plus particulièrement aux circuits utilisant un
générateur optique d'un champ électrostatique à des fréquences de la lumière.
La mesure de l'efficacité d'un circuit électrique
peut être définie comme le rapport entre l'énergie émise sous la forme
souhaitée (par exemple la lumière dans un circuit d'éclairage) à l'énergie
électrique d'entrée. Jusqu'à présent, l'efficacité de nombreux circuits n'a pas
été très élevée. Par exemple, dans un
circuit d'éclairage en utilisant des lampes fluorescentes de 40 watts,
seulement environ 8,8 watts de l'énergie d'entrée par lampe est réellement
convertie à la lumière visible, ce qui représente un rendement de seulement 22
%. Les watts 31,2 restants se dissipe
principalement sous forme de chaleur.
Il a été suggéré qu'avec éclairage circuits ayant
des lampes fluorescentes, augmentation de la fréquence du courant appliqué
déclenchera l'efficacité globale du circuit.
Alors qu'à une fréquence de 60 Hz, le rendement est de 22 %, si la
fréquence est augmentée à 1 Mhz, l'efficacité du circuit seulement passerait à
environ 25,5 %. En outre, si la
fréquence d'entrée est portée à 10 Ghz, l'efficacité globale du circuit serait
seulement 35 %.
RÉSUMÉ DE LA PRÉSENTE INVENTION
La présente invention utilise un générateur
électrostatique optique qui est efficace pour la production des hautes
fréquences dans la gamme de lumière visible de 1014 à 1023 Hz environ. Le fonctionnement et la théorie de l'optique
générateur électrostatique a été décrits et discutés dans ma demande en série
no 5 248, déposée le 23 janvier 1970. Comme
indiqué dans ma demande, générateur électrostatique optique présent n'exécute
pas conformément aux normes acceptées et normes des fréquences
électromagnétiques ordinaires.
Le générateur électrostatique optique comme
utilisés dans la présente invention peut générer une large gamme de fréquences
entre plusieurs Hertz et ceux de la fréquence de la lumière. En conséquence, c'est un objet de la présente
invention pour fournir les circuits d'énergie électrique utilisant mon optique
générateur électrostatique, par lequel l'énergie émise sous la forme désirée
sera significativement plus efficace qu'il est possible à ce jour, à l'aide des
équipements et des techniques de circuit standard. C'est un autre objet de la présente invention
de fournir un tel circuit dans l'éclairage fluorescent ou autres circuits
d'éclairage. C'est aussi un objet de la
présente invention de prévoit qu'un circuit avec peut-être être utilisé en
conjonction avec les précipitateurs électrostatiques pour la poussière et
collecte de particules et enlèvement, ainsi que plusieurs autres fins.
DESCRIPTION DES DESSINS
Fig.1 est une
présentation schématique montrant un optique générateur électrostatique de la
présente invention, utilisée dans un circuit d'éclairage pour lampes
fluorescentes :
Fig.2 une présentation schématique d'un circuit haute tension intègre un générateur électrostatique optique :
Fig.2A est une vue en
coupe une partie du générateur et
Fig.3 une vue en
coupe schématique montre un générateur électrostatique optique conformément à la
présente invention, notamment pour un usage dans les circuits de courant
alternatif, mais il peut également être utilisé dans les circuits de courant
continu :
DESCRIPTION DES MODES DE RÉALISATION ILLUSTRÉS
Se référant aux dessins et à la Fig.1 en particulier, montre un circuit basse tension utilisant un générateur électrostatique optique. Comme illustré à la Fig.1, une source d'énergie électrique à courant alternatif 10, est relié à un circuit d'éclairage. Relié à un robinet de la source de puissance 10 est un redresseur 12 pour utilisation en courant continu est nécessaire. Le circuit illustré est fourni avec un interrupteur 14 qui peut être ouvert ou fermé selon que le courant alternatif ou continu est utilisé. Commutateur 14 est ouverte et un commutateur 16 est fermé lorsque l'CA est utilisé. Avec 14 fermé et l'interrupteur 16 ouvert, le circuit fonctionne comme un circuit CC.
S'étendant de commutateurs 14 et 16 est le chef d'orchestre 18 qui est relié à un générateur d'électrostatique optique 20. Chef d'orchestre 18 est passé à travers un isolant 22 et reliée à une valeur de 24. Espacées d'électrode 24 est une deuxième électrode 25. Enfermant des électrodes 24 et 25, qui préférence sont faites de tungstène ou un matériau similaire, est un tube en verre de quartz 26 qui est rempli d'un gaz ionisable 28 comme le xénon ou tout autre gaz ionisable approprié tel que l'argon, krypton, néon, azote ou hydrogène, ainsi que les vapeurs de métaux comme le mercure ou le sodium.
Entourant chaque extrémité du tube 26 et adjacente aux électrodes 24 et 25, sont des plaques de
condensateur 30 et 32 sous forme de capsules. Un chef d'orchestre est connecté à l'électrode
25 et traversé un deuxième isolateur
34. Entourant le tube, les électrodes et les casquettes
de condensateur est une enveloppe métallique sous la forme d'une mince feuille
de cuivre ou autres métaux comme l'aluminium. Enveloppe 36 est espacée des conducteurs menant dans et hors le générateur au
moyen d'isolateurs 22 et 34. Enveloppe 36 est rempli d'un matériau diélectrique comme huile de
transformateur, hautement purifié l'eau distillée, nitro-benzène ou tout autre
diélectrique liquide approprié. En outre, le diélectrique peut être un
solide comme matériau céramique avec des molécules relativement petites.
Un conducteur 40
est relié à l'électrode 25, passé à
travers l'isolant 24 et ensuite
connecté à une série de lampes fluorescentes 42 qui sont connectés en série. C'est les lampes 42 qui seront à la mesure de
l'efficacité du circuit contenant le générateur d'électrostatique optique 20. Un chef d'orchestre 44 complète le circuit des lampes fluorescentes pour le robinet de
la source d'énergie électrique 10. En outre, le circuit est raccordé à une terre 46 par un autre conducteur 48. Enveloppe 36
est également mise à la terre de plomb 50
et dans le diagramme illustré, fil 50
est raccordé au conducteur 44.
Les casquettes de condensateur ou plaques 30 et 32, forment un condensateur
relatif avec le tube à décharge. Lorsqu'une tension élevée est appliquée à
l'électrode de la canule, les ions de gaz sont excitées et portées à un
potentiel plus élevé que leur environnement, c'est-à-dire l'enveloppe et le
diélectrique qui l'entourent. À ce
stade, le gaz ionisé devient en effet une plaque d'un condensateur relative en
coopération avec les capuchons de condensateur ou de plaques 30 et 32.
Lorsque cet relatif condensateur est déchargé, le
courant électrique ne diminue pas comme normalement. Au lieu de cela, il reste
sensiblement constante en raison de la relation entre le relatif et
condensateur un absolu qui se forme entre le gaz ionisé et l'enveloppe
métallique espacé 36. Un effet d'oscillation se produit dans le
condensateur relatif, mais la condition électrique dans le condensateur absolue
reste sensiblement constante.
Comme décrit dans la demande en série no 5 248, il
y a un effet d'oscillation entre le gaz ionisé dans la lampe à décharge et
l'enveloppe métallique 36 sera
présent si les bouchons de condensateur sont éliminés, mais diminuera
considérablement l'efficacité du générateur électrostatique.
Le visage de l'électrode peut être n'importe
quelle forme souhaitée. Toutefois, un point conique de 600 s'est avéré pour
être satisfaisante et il est censé avoir une influence sur l'efficacité du
générateur.
En outre, le type de gaz choisi pour être utilisés
en tube 26, ainsi que la pression du
gaz dans le tube, aussi affecter l'efficacité du générateur et par conséquent,
l'efficacité du circuit électrique.
Pour démontrer l'efficacité accrue d'un circuit
électrique utilisant l'optique générateur électrostatique de la présente
invention, mais aussi la relation entre la pression du gaz et de l'efficacité
électrique, un circuit similaire à celle illustrée à la Fig.1 est utilisable avec 100 standard 40 watts, lampes
fluorescentes de cool-blanc montés en série. Le générateur électrostatique
optique comprend un tube de verre de quartz rempli de xénon, avec une série de
différents tubes utilisés à cause des pressions de gaz différents mis à
l'essai.
Le Tableau
1 montre les données obtenues concernant le générateur électrostatique
optique. Le Tableau 2 montre la
performance de la lampe et l'efficacité pour chacun des tests indiqués au Tableau
1. Ce qui suit est une description des
données dans chacune des colonnes des Tableaux 1 et 2.
|
Colonne |
Description |
|
B |
Gaz utilisé dans le tube à décharge |
|
C |
Pression du gaz dans le tube (en torrs) |
|
D |
Intensité de champ dans le tube (mesurée en volts par cm. de longueur entre les électrodes) |
|
E |
Densité de courant (mesurée en microampères par mm. carrés de section transversale tube) |
|
F |
Courant (amps) |
|
G |
Puissance à travers le tube (watts par cm. de longueur entre les électrodes) |
|
H |
Tension par lampe (volts) |
|
K |
Courant (amps) |
|
L |
Résistance (ohms) |
|
M |
Input power per lamp (calculated in watts) |
|
N |
Light output (measured in lumens) |
Tableau 1
|
|
|
Optical |
Generator |
Section |
|
|
|
A |
B |
C |
D |
E |
F |
G |
|
Test No. |
Type de lampe à décharge |
Pression de xénon |
Intensité de champ dans le tube |
Densité de courant |
Courant |
Puissance à travers le tube |
|
|
|
(Torr) |
(V/cm) |
(A/sq.mm) |
(A) |
(W/cm.) |
|
1 |
Mo elec |
- |
- |
- |
- |
- |
|
2 |
Xe |
0.01 |
11.8 |
353 |
0.1818 |
2.14 |
|
3 |
Xe |
0.10 |
19.6 |
353 |
0.1818 |
3.57 |
|
4 |
Xe |
1.00 |
31.4 |
353 |
0.1818 |
5.72 |
|
5 |
Xe |
10.00 |
47.2 |
353 |
0.1818 |
8.58 |
|
6 |
Xe |
20.00 |
55.1 |
353 |
0.1818 |
10.02 |
|
7 |
Xe |
30.00 |
62.9 |
353 |
0.1818 |
11.45 |
|
8 |
Xe |
40.00 |
66.9 |
353 |
0.1818 |
12.16 |
|
9 |
Xe |
60.00 |
70.8 |
353 |
0.1818 |
12.88 |
|
10 |
Xe |
80.00 |
76.7 |
353 |
0.1818 |
13.95 |
|
11 |
Xe |
100.00 |
78.7 |
353 |
0.1818 |
14.31 |
|
12 |
Xe |
200.00 |
90.5 |
353 |
0.1818 |
16.46 |
|
13 |
Xe |
300.00 |
100.4 |
353 |
0.1818 |
18.25 |
|
14 |
Xe |
400.00 |
106.3 |
353 |
0.1818 |
19.32 |
|
15 |
Xe |
500.00 |
110.2 |
353 |
0.1818 |
20.04 |
|
16 |
Xe |
600.00 |
118.1 |
353 |
0.1818 |
21.47 |
|
17 |
Xe |
700.00 |
120.0 |
353 |
0.1818 |
21.83 |
|
18 |
Xe |
800.00 |
122.8 |
353 |
0.1818 |
22.33 |
|
19 |
Xe |
900.00 |
125.9 |
353 |
0.1818 |
22.90 |
|
20 |
Xe |
1,000.00 |
127.9 |
353 |
0.1818 |
23.26 |
|
21 |
Xe |
2,000.00 |
149.6 |
353 |
0.1818 |
27.19 |
|
22 |
Xe |
3,000.00 |
161.4 |
353 |
0.1818 |
29.35 |
|
23 |
Xe |
4,000.00 |
173.2 |
353 |
0.1818 |
31.49 |
|
24 |
Xe |
5,000.00 |
179.1 |
353 |
0.1818 |
32.56 |
Table 2
|
|
|
Fluorescent |
Lamp |
Section |
|
|
A |
H |
K |
L |
M |
N |
|
Test No. |
Voltage |
Courant |
Résistance |
Énergie d'entrée |
Rendement lumineux |
|
|
(Volts) |
(Amps) |
(Ohms) |
( |
(Lumen) |
|
1 |
220 |
0.1818 |
1,210 |
40.00 |
3,200 |
|
2 |
218 |
0.1818 |
1,199 |
39.63 |
3,200 |
|
3 |
215 |
0.1818 |
1,182 |
39.08 |
3,200 |
|
4 |
210 |
0.1818 |
1,155 |
38.17 |
3,200 |
|
5 |
200 |
0.1818 |
1,100 |
36.36 |
3,200 |
|
6 |
195 |
0.1818 |
1,072 |
35.45 |
3,200 |
|
7 |
190 |
0.1818 |
1,045 |
34.54 |
3,200 |
|
8 |
182 |
0.1818 |
1,001 |
33.08 |
3,200 |
|
9 |
175 |
0.1818 |
962 |
31.81 |
3,200 |
|
10 |
162 |
0.1818 |
891 |
29.45 |
3,200 |
|
11 |
155 |
0.1818 |
852 |
28.17 |
3,200 |
|
12 |
130 |
0.1818 |
715 |
23.63 |
3,200 |
|
13 |
112 |
0.1818 |
616 |
20.36 |
3,200 |
|
14 |
100 |
0.1818 |
550 |
18.18 |
3,200 |
|
15 |
85 |
0.1818 |
467 |
15.45 |
3,200 |
|
16 |
75 |
0.1818 |
412 |
13.63 |
3,200 |
|
17 |
67 |
0.1818 |
368 |
12.18 |
3,200 |
|
18 |
60 |
0.1818 |
330 |
10.90 |
3,200 |
|
19 |
53 |
0.1818 |
291 |
9.63 |
3,200 |
|
20 |
50 |
0.1818 |
275 |
9.09 |
3,200 |
|
21 |
23 |
0.1818 |
126 |
4.18 |
3,200 |
|
22 |
13 |
0.1818 |
71 |
2.35 |
3,200 |
|
23 |
8 |
0.1818 |
44 |
1.45 |
3,200 |
|
24 |
5 |
0.1818 |
27 |
0.90 |
3,200 |
La conception d'une construction de tubes pour
utilisation dans l'optique générateur électrostatique du type utilisé dans la Fig.1, peut être effectué en
considérant le rayon du tube, la longueur entre les électrodes dans le tube et
la puissance à travers le tube.
Si R
est le minimum à l'intérieur du rayon du tube en centimètres, L la longueur minimale en centimètres
entre les électrodes et W la
puissance en watts à travers la lampe, la formule suivante peut être obtenue du
Tableau 1 :
R = (Courant [A] / Densité de courant
[A/sq.mm] ) / pi
L = 8R
W = L[V/cm] x A
Par exemple, pour le Test n° 18 dans le tableau 1 :
Le courant est 0.1818 A,
La densité de courant 0.000353 A/sq.mm et
La Distribution de tension est 122,8 V/cm ; C'est
pourquoi
R = (0.1818 / 0.000353)2 /3.14 = 12.80 mm.
L = 8 x R = 8 * 12.8
= 102.4 mm (10.2 cm.)
W = 10.2 x 122.8 x
0.1818 = 227.7 VA ou 227.7 watts
L'efficacité du pourcentage de fonctionnement des
lampes fluorescentes dans Test No. 18 calculée à partir de l'équation suivante
:
% Efficacité = (production/consommation d'énergie
énergie) x 100
À travers une lampe fluorescente unique, la
tension est de 60 volts et le courant est 0,1818 ampères donc l'énergie
d'entrée à la lampe 42 est 10,90
Watts. La sortie de la lampe fluorescente
est de 3 200 lumens qui représente 8,8 Watts puissance d'énergie lumineuse. Ainsi, la lampe fluorescente un fonctionnant à
80,7 % efficacité dans ces conditions.
Toutefois, lorsque le générateur optique est
identique à celui décrit pour le Test no 18 et il y a 100 lampes fluorescentes
en série dans le circuit, la puissance totale absorbée est 227,7 watts pour le
générateur optique et 1 090 watts pour 100 des lampes fluorescentes, soit un
total de 1 318 watts. L'entrée de puissance totale normalement nécessaire pour
faire fonctionner les lampes fluorescentes 100 dans un circuit normal serait de
100 x 40 = 4 000 watts. Donc, en utilisant le générateur optique dans le
circuit, environ 2 680 watts d'énergie est enregistrée.
Tableau 1 est un exemple du fonctionnement de cette invention pour une lampe fluorescente (blanc froid 40 watt) de particulier. Toutefois, les données semblables peuvent être obtenues pour d'autres applications de l'éclairage, par ceux du métier.
En Fig.2,
un circuit est montré qui utilise un générateur d'électrostatique optique 20a, similaire au générateur 20 en Fig.1. Groupe électrogène 20, qu'un seul condensateur 32 a est utilisée et c'est préférence
de conception transversale triangulaire.
En outre, la deuxième électrode 25
a est connecté directement dans le conducteur de retour 52, semblable à l'arrangement montré dans ma demande en série no 5
248, déposée le 23 janvier 1970.
Cet arrangement est de préférence pour les
circuits de très haute tension et le générateur est particulièrement adapté
pour l'utilisation de CC.
Fig.2, les éléments
communs ont reçu les mêmes numéros qui servaient à la Fig.1.
Fig.3, montre encore un mode de réalisation d'un générateur électrostatique d'optique 20b. Ce générateur est particulièrement adapté pour une utilisation avec les circuits CA. Dans cette réalisation, le condensateur plaques 30b et 32b ont pour brides, 54 et 56, qui s'étendent vers l'extérieur pour l'enveloppe de 36. Tandis que l'utilisation de l'optique générateur électrostatique a été décrite en usage dans un circuit d'éclairage fluorescent, il doit être compris que beaucoup d'autres types de circuits peut-être être utilisés. Par exemple, l'incarnation de la haute tension peut-être servir dans une variété de circuits tels que les lampes flash, des contrôles à grande vitesse, rayons laser et des impulsions de haute énergies. Le générateur est également particulièrement utilisable dans un circuit dont la précipitation de particules électrostatiques dans les dispositifs de contrôle de la pollution aérienne, synthèse chimique dans des systèmes de décharge électrique comme générateurs d'ozone et la charge signifie pour les générateurs de haute tension de la Van de Graff type, ainsi que des accélérateurs de particules. Pour ceux du métier, beaucoup d'autres utilisations et circuits sera apparents.
HAROLD COLMAN & RONALD SEDDON-GILLESPIE: BATTERIE DE 70
ANS
Brevet GB 763 062 5th décembre
1956 Inventeurs: Harold Colman and
Ronald Seddon-Gillespie
APPAREIL POUR PRODUIRE UN COURANT ÉLECTRIQUE
Ce brevet
montre les détails d'un appareil léger qui peut produire de l'électricité à
l'aide d'un électroaimant autoalimenté et sels chimiques. La durée de vie de l'appareil avant d'avoir besoin
d'une recharge est estimée à quelque soixante-dix ans. Le fonctionnement est
contrôlé par un émetteur qui bombarde l'échantillon chimique avec les ondes
radio de 300 MHz. Cela produit des émissions radioactives de la bouillie
chimique pour une durée d'une heure maximum, donc l'émetteur doit être exécuté
pendant quinze à trente secondes une fois par heure. Le mélange chimique est protégé par un écran
de plomb pour empêcher les radiations nocives pour atteindre l'utilisateur. La
sortie de l'appareil minuscule décrit est estimée à quelque 10 ampères à 100 à
110 volts CC.
DESCRIPTION
Cette invention rapporte à un nouvel appareil pour
la production de courant électrique, l'appareil étant sous la forme d'un
accumulateur complètement nouveaux.
L'objet de cette invention est de fournir des appareils du type
ci-dessus qui est considérablement plus léger qu'et a une vie infiniment plus
grande qu'une batterie connue ou les caractéristiques similaires et qui peut
être ré-activé comme et, au besoin en un minimum de temps.
Selon la présente invention, nous fournissons
appareil comprenant une unité de générateur qui comprend un aimant, un moyen
pour y suspendre un mélange de produits chimiques dans le champ magnétique, le
mélange étant composé d'éléments dont le noyau devient instable à la suite de
bombardements par ondes courtes afin que les éléments deviennent radioactifs et
libèrent de l'énergie électrique, le mélange étant monté entre et en contact
avec, une paire de différents métaux comme le cuivre et le zinc, un
condensateur monté entre les métaux, un terminal raccordé électriquement à
chacun des métaux, signifie pour l'acheminement des vagues pour le mélange et
un blindage de plomb entourant le mélange pour éviter les rayonnements nocifs
du mélange.
Préférence, le mélange est composé des éléments Cadmium,
de phosphore et de Cobalt ayant respectivement les poids atomiques de 112, 31
et 59. Le mélange, qui peut être de la
forme de poudre, est monté dans un tube de matière de résistivité élevé, non
conducteur de chaleur et est comprimé entre zinc cristallisé à une extrémité du
tube et de cuivre granulé à l'autre extrémité, les extrémités du tube étant
fermé par des bouchons en laiton et le tube en cours sur un support approprié
afin qu'il se trouve entre les pôles de l'aimant. L'aimant est de préférence un électro-aimant
et est alimenté par le courant produit par l'unité.
Les moyens pour transmettre les ondes au mélange
peuvent être une paire d'antennes qui ressemblent exactement aux antennes de
l'émetteur pour produire les vagues, chaque antenne projetée d'et être
assujetti au couvercle à chaque extrémité du tube de laiton.
L'unité de transmission qui permet d'activer
l'appareil générateur peut être de n'importe quel type de classique
fonctionnant sur ondes ultra courtes et est préférablement crystal contrôlée à
la fréquence désirée.
DESCRIPTION DES DESSINS
Fig.1 est une élévation de côté d'une forme de l'appareil.
Fig.2 est qu'une vue
est une élévation de la fin
Fig.3 est un schéma de circuit schématique.
Sous la forme
de notre invention illustrée, l'unité du générateur comprend une base 10 sur lesquels sont montés les
différents composants. Cette base 10,
en projetant vers le haut de lui une paire de bras 11, qui forment un berceau logement 12 pour un tube de quartz 13,
le berceau 12 de préférence faits
d'une matière de printemps afin que le tube 13 est fermement, pourtant amovible maintenue en position. Les bras 11
sont positionnés par rapport aux pôles 14
d'un électro-aimant 15 afin que le
tube 13 se trouve immédiatement
entre les pôles de l'aimant afin d'être dans le plus puissant champ magnétique
créé par l'électro-aimant. L'aimant permet de contrôler les rayons alpha et
bêta émis par la cartouche lorsqu'il est en fonctionnement.
Les extrémités du tube quartz 13 sont chacun muni d'un bouchon de laiton 16, et ces sélections sont adaptées pour s'engager dans les
berceaux de printemps 12 et les
serpentins 17 associée à l'aimant
étant disposées de manière à que si la base 10 de l'unité est dans un plan horizontal, pôles 14 de l'aimant sont dans un plan
sensiblement vertical.
Aussi branché sur les berceaux, c'est un
condensateur de plomb 18 qui peut
idéalement être logé dans la base 10
de l'unité et connecté en parallèle avec ce condensateur 18 est une bobine d'inductance adapté haute fréquence 19. L'unité est équipée d'un blindage
de plomb 20 afin d'éviter les
rayonnements nocifs du tube de quartz que décrira plus tard.
Le tube de quartz 13 a monté en elle, à une extrémité, une quantité de cuivre granulé
qui est en contact électrique avec le bouchon en laiton 16 à cette extrémité du tube. Également monté dans le tube et en contact
avec le cuivre granulé est un mélange de produits chimiques qui est sous forme
de poudre et qui est capable de libérer l'énergie électrique et qui devient
radioactif lorsqu'ils sont soumis à des bombardements par ondes ultracourtes.
Monté dans l'autre extrémité du tube et en contact
avec l'autre extrémité de la bouillie chimique en poudre est une quantité de
zinc cristallisé qui est lui-même en contact avec le bouchon en laiton sur
cette extrémité du tube, l'arrangement étant que le mélange chimique est
comprimé entre le granulé cuivre et le zinc cristallisé.
Projetant vers l'extérieur de chaque bouchon en
laiton 16 et reliés électriquement à
eux, est une antenne 21. Chaque antenne 21 correspondant exactement à la dimension, la forme et les
caractéristiques électriques de l'antenne associée à une unité de le « émetteur
qui doit produire la shortwaves ultra mentionné plus tôt.
L'électro-aimant 15 est aisément transportée par un pilier central 22 qui est fixé à la base 10. À l'extrémité supérieure de la borne 22 il y a une traverse 23, qui a la haute fréquence bobine 19 à une extrémité de celui-ci. L'autre
extrémité de la barre transversale 23
est pliée autour dans la forme incurvée comme indiqué à 24 et est adaptée à supporter contre une partie courbée 25 des base 26 de l'électro-aimant 15.
Un dispositif de verrouillage approprié
est fourni pour tenir les parties courbes 24
et 25 dans la position angulaire
souhaitée, afin que la position des pôles 14
de l'électro-aimant peut être ajustée sur l'axe du tube quartz 13.
L'émetteur est de tout type conventionnel
approprié pour produire ultra shortwaves et peut être contrôlé pour s'assurer
qu'il fonctionne à la fréquence souhaitée avec la nécessité de l'écoute par
crystal. Si l'émetteur est uniquement
nécessaire pour faire fonctionner sur une courte distance, il peut être
idéalement alimenté par piles, mais si elle doit fonctionner sur une plus
grande plage, puis il peut fonctionner un courant approprié tel que le secteur.
Si l'émetteur est d'être à l'écoute,
puis l'accordage peut être opéré par un cadran fourni avec une échelle de
vernier micrométrique afin que la précision de réglage nécessaire peut être
atteint.
Le mélange qui est contenu dans le tube de quartz
est constitué des éléments Cadmium, de phosphore et de Cobalt, ayant
respectivement les masses atomiques 112,
31 et 59. Idéalement, ces éléments peuvent être présents
dans les composés suivants, et où le tube doit contenir trente milligrammes de
mélange, les composés et leurs proportions en poids sont :
1 partie de Co (No3) 2 6H2O
2 pièces de CdCl2
3 pièces de 3 Ca (Po3) 2 + 10 C.
La cartouche qui se compose du tube 13 avec le mélange de produits chimiques
dedans est préférablement composée d'un certain nombre de petites cellules en
série. En d'autres termes, compte tenu
de la cartouche d'un bout à l'autre, à une extrémité et en contact avec le
bouchon en laiton, il y aurait une couche de cuivre en poudre, puis une couche
du mélange chimique, puis une couche de zinc en poudre, une couche de poudre
cuivre, etc., avec une couche de zinc en poudre en contact avec le bouchon en
laiton à l'autre extrémité de la cartouche. Avec une cartouche de quelques quarante-cinq
millimètres de long et cinq millimètres de diamètre, certaines quatorze
cellules peuvent être incluses.
Berceaux 12 dans lequel les cuivres casquettes 16 s'engager, peuvent se former bornes dans lesquelles la sortie de l'appareil peut-être être prise. Alternativement, une paire de bornes 27 peut être connectée entre les berceaux 12, ces bornes 27 étant eux-mêmes fourni avec des antennes appropriées 28, qui correspondent exactement dans leurs dimensions, forme et caractéristiques électriques pour les antennes associées à l'émetteur, ces antennes 28, remplaçant les antennes 21.
En opération
avec le tube de quartz contenant le mélange ci-dessus, situé entre le granulé
cuivre et le zinc cristallisé et avec le tube lui-même en position entre les
pôles de l'aimant, l'émetteur est allumé et l'ultra shortwaves venant de lui
sont reçus par les antennes montés à chaque extrémité du tube et en contact
avec le cuivre et le zinc respectivement, les vagues étant donc passés par le
cuivre et le zinc et le mélange pour que le mélange est bombardé par les ondes
courtes et le Cadmium, phosphore et Cobalt associés avec le mélange devenir
radioactif et libèrent de l'énergie électrique qui est transmise pour le cuivre
granulé cristallisé zinc, provoquant un courant de circuler entre eux d'une
manière similaire à l'écoulement du courant produit par un thermo couple. Il a été établi que, avec un mélange dont
la composition ci-dessus, la libération optimale de l'énergie est obtenue
lorsque l'émetteur fonctionne à une fréquence de 300 MHz.
La fourniture d'un tube de quartz est nécessaire
pour le mélange évolue une quantité considérable de chaleur alors que c'est en
réaction au bombardement des ondes courtes.
Il se trouve que le tube durera pendant une heure et que le tube se
soient déchargé après une heures de fonctionnement, c'est-à-dire, la
radioactiveness du tube ne durera que pendant une heure et il est donc
nécessaire, si l'appareil ne doit être exécuté en continu, pour l'émetteur doit
fonctionner pendant une période d'une durée de quinze à trente secondes une
fois par heure.
Avec un tube de quartz, ayant une longueur totale
de quelque quarante cinq millimètres et un intérieur diamètre de cinq
millimètres et contenant à trente milligrammes du mélange chimique, l'énergie
qui sera du tube pour une décharge d'une heure, sont de 10 ampères à entre 100
et 110 volts. Pour activer le tube à
dégager de cette décharge, il est seulement nécessaire d'exploiter l'émetteur à
la fréquence souhaitée pour une période d'une durée de quinze à trente
secondes.
Le courant qui est émis par le tube pendant la
décharge est sous forme de courant continu. Au cours de la décharge du tube,
rayonnements nocifs sont émis sous forme de rayons gamma, les rayons alpha et
rayons bêta et il est donc nécessaire de monter l'appareil dans un blindage de
plomb pour éviter les radiations nocives d'affecter du personnel et des objets
à proximité de l'appareil. Les rayons
alpha et bêta qui émanent de la cartouche quand il est en fonctionnement sont
contrôlés par l'aimant.
Lorsque l'appareil est raccordé jusqu'à certains
appareils qui doit être alimenté par lui, il est nécessaire de prévoir des
fusibles adaptés pour se prémunir contre la cartouche étant court-circuité qui
pourrait causer la cartouche à exploser.
Le poids approximatif d'une telle unité, y compris
le blindage nécessaire, par la sortie de kilowatt heure, est d'environ 25 % de
n'importe quel type de norme connue de l'accumulateur qui est utilisé
aujourd'hui et on estime que la durée de vie du mélange chimique est
probablement dans la région de soixante-dix à quatre-vingts ans sous une
utilisation constante.
On voit donc que nous avons fourni une nouvelle forme de l'appareil de production d'un courant électrique, qui est considérablement plus léger que le type standard de l'accumulateur à présent connue, et qui a une vie infiniment plus grande que le type standard de l'accumulateur, et qui peuvent être rechargées ou réactivé comme et quand vous le souhaitez et depuis un emplacement distant selon la puissance de sortie de l'émetteur. Cette forme de batterie a de nombreuses applications
.
JONG-SOK AN: GÉNÉRATEUR AVEC UNE PUISSANCE D'ENTRÉE FIXE
Brevet américain 6 208 061
27 mars 2001
Inventeurr: Jong-Sok An
GÉNÉRATEUR AVEC UNE PUISSANCE D'ENTRÉE FIXE
Alimentation électrique est souvent générée en faisant tourner l'arbre d'un générateur qui a un arrangement des bobines et des aimants qu'il contenus. Le problème est que lorsque le courant est tiré le décollage de bobines d'un générateur de typique, il devient beaucoup plus difficile à tourner l'arbre du générateur. La conception de ruse montrée dans ce brevet surmonte ce problème avec une conception simple, dans lequel l'effort nécessaire pour faire tourner l'arbre n'est pas altérée par le courant consommé par le générateur.
RÉSUMÉ
Un générateur de la présente invention est formé des trains à un aimant permanent de bague 2 et 2' attachés et fixés sur deux orbites 1 et 1' autour d'un axe de rotation 3, induction magnétique primaire des carottes de 4 et 4' attachés et fixés au-dessus des surfaces périphériques externes de l'aimant permanent de bague forme 2 et 2' à une distance prédéterminée de la surface extérieure du périphérique, induction magnétique des noyaux secondaires 5 et 5' attaché et fixé sur les noyaux primaires d'induction magnétique 4 et 4' et chacun ayant deux couplage, trous 6 et 6' formé dans ce rapport, tertiaires carottes 8 et 8' inséré pour accouplement respectivement dans deux trous 6 et 6' de couplage de chaque de l'induction magnétique associée secondaire cores 5 et 5' en face de l'autreet bobines réactifs 7 et 7'. Le permanent de l'anneau magnétique s'entraîne 2 et 2' sont constitués de 8 ensembles d'aimants avec une alternance de pôles N et S, et les aimants sont associées entre elles dans le sens axial ont respectivement les polarités opposées et forment une paire..
DESCRIPTION
DOMAINE TECHNIQUE
La présente invention se rapporte aux générateurs,
en particulier à un générateur sans charge qui peut optimiser l'efficacité de
la génératrice en effaçant ou en éliminant la charge répulsive secondaire
exercée sur le rotor au cours de la production d'énergie électrique.
CONTEXTE DE L'INVENTION
Le générateur est un appareil qui convertit
l'énergie mécanique provenant de sources de différents types d'énergie tels que
physique, chimique ou de l'énergie nucléaire, par exemple, en énergie
électrique. Basée sur le mouvement linéaire des générateurs ont récemment été
développés tandis que la plupart des générateurs sont structurés comme des
générateurs de type rotation. Génération de force électromotrice par induction
électromagnétique est un principe commun aux générateurs quel que soit leur
taille ou si le générateur est générateur de courant alternatif ou continu.
Le générateur nécessite un aimant puissant comme un aimant permanent et l'électro-aimant pour générer le champ magnétique, mais aussi un chef d'orchestre pour générer la force électromotrice, et le groupe électrogène est structuré pour permettre à l'un d'eux à tourner par rapport à l'autre. Selon lesquels de l'aimant et le conducteur tourne, les générateurs peuvent être classés en type de champ de rotation générateurs dans lesquels le champ magnétique tourne et armature tournante type générateurs dans lesquels le conducteur tourne.
Bien que
l'aimant permanent peut être utilisé pour générer le champ magnétique,
l'électro-aimant est généralement employée qui est formé d'une bobine de champ
magnétique enroulé autour d'un noyau pour permettre à courant continu de
circuler à travers eux. Même si un
aimant puissant est utilisé pour améliorer la vitesse de rotation, généralement
la force électromotrice produite à partir d'un des conducteurs n'est pas si
grande. Ainsi, dans un système généralement indépendants, un grand nombre de
conducteurs est fourni dans le générateur et les forces électromotrices générés
par conductare respectif en série additionné afin de parvenir à une haute
puissance électrique.
Comme indiqué plus haut, un habituel générateur
produit de l'électricité en tournant mécaniquement un aimant (ou aimant
permanent) ou un chef d'orchestre (électro-aimant, bobine électrique réactive
et autres) tout en courant inverse générée à ce moment de l'induction
magnétique (induction électromagnétique) et qui coule à travers la force
magnétique de causes bobine qui tire le rotor de sorte que le rotor lui-même
est soumis à une charge inutile qu'il atteint au moins deux fois la production
d'énergie électrique.
Fig.6 montre que la charge comme indiqué plus haut s'exerce sur un rotor dans un générateur de champ tournant type mentionné ci-dessus.
Se référant à la Fig.6, un train à un aimant permanent 104 est organisé autour d'un axe de rotation 106 telle que les pôles N et poteaux S est alternativement situées sur le périphérique extérieur du train. À une certaine distance vers l'extérieur de la périphérie extérieure du aimant permanent train 104, un noyau d'induction magnétique 100 est arrangé et une bobine 102 est enroulée autour de l'induction magnétique base 100.
Comme un aimant permanent train 104 tourne, le champ magnétique produit dans la bobine en train de l'aimant permanent 104 changements pour provoquer des courants induits à travers la bobine 102. Ce courant induit permet bobine 102 pour générer un champ magnétique 110 qui provoque une force de répulsion exercée sur l'aimant permanent train 104 dans la direction qui entrave la rotation du train magnet.
Par exemple, dans l'exemple illustré à la Fig.6, le pôle S du champ magnétique 110 faces à un aimant permanent train 104. Le pôle S d'aimant permanent train 104 approches bobine 102 à cause de la rotation des aimants permanents de train 104, ce qui entraîne la force répulsive comme décrit ci-dessus.
Si l'inversion des flux actuels dans une bobine sensible
d'une armature enroulé autour d'un noyau d'induction magnétique d'un générateur
de sorte que la charge qui en résulte entrave le rotor de rotation, inversion
champ magnétique de la bobine d'armature sensible devient plus forte en
proportion de la production d'électricité et, par conséquent, une charge
correspondant au moins deux fois la consommation instantanée peut se produire.
Si la puissance électrique de 100W est utilisé,
par exemple, inverser champ magnétique d'au moins 200W est généré afin qu'une
énorme quantité de charge affecte le rotor pour perturber la rotation du rotor.
Tous les générateurs classiques ne subissent pas
seulement une charge mécanique primaire, c'est-à-dire la charge lorsque le
courant électrique n'est pas consommé mais une charge secondaire en raison du
courant inverse qui est proportionnelle à la consommation d'énergie électrique
et par conséquent soumis à une charge d'au moins deux fois la consommation
instantanée.
DESCRIPTION DE L'INVENTION
Un objet de la présente invention est de fournir
un générateur capable de générer électricité avec un rendement élevé en
annulant la charge secondaire sauf la charge mécanique du générateur,
c'est-à-dire annulant la charge qui est générée en raison d'un courant inverse
d'une bobine sensible d'une armature enroulé autour d'un noyau de l'induction
magnétique, afin d'empêcher totalement la charge secondaire exercée.
En bref, la présente invention est appliquée à un
générateur sans charge, y compris un axe de rotation, un premier train d'aimant
de bague, un second train de bague aimant, première pluralité des noyaux
primaires de première induction magnétique, une première pluralité de deuxième
carottes primaire de l'induction magnétique, une première bobine sensible et
une deuxième bobine sensible.
Le premier train de bague aimant a des pôles N et poteaux S successivement disposées sur une périphérie extérieure d'une première orbite de rotation autour de l'axe de rotation. Le second train d'aimant de bague a aimants successivement disposées sur une périphérie extérieure d'une seconde orbite de rotation sur l'axe de rotation à une distance prédéterminée de la première orbite de rotation telle que la polarité des aimants sur l'orbite de rotation deuxième est opposé les polarités à des endroits opposés sur la première orbite de rotation respectivement. La première pluralité des noyaux primaires de première induction magnétique sont fixés le long d'une première surface périphérique du premier anneau aimant train à une distance prédéterminée de la première surface périphérique. La première pluralité des noyaux primaires de deuxième induction magnétique sont fixés le long d'une deuxième surface périphérique du deuxième anneau aimant train à une distance prédéterminée de la deuxième surface périphérique. Une première pluralité de premier accouplement magnétique induction cores et une pluralité premier du deuxième couplage magnétique induction carottes sont fournis par paires pour former un circuit magnétique fermé entre les cœurs d'induction magnétique de première et deuxième primaire en face de l'autre en direction de l'axe de rotation. La première Spire réactive est enroulée autour du noyau de l'induction magnétique premier accouplement. La deuxième bobine sensible est enroulée autour de la second noyau d'induction magnétique de couplage, le sens d'enroulement de la deuxième bobine sensible étant inversé par rapport à la première Spire sensible.
De préférence, dans le générateur de l'invention
sans charge, le premier train d'aimant de bague comprend un aimant permanent de
train disposé le long de la périphérie extérieure de la première orbite de
rotation, et le second train d'aimant de bague comprend un aimant permanent de
train disposé le long de la périphérie externe de l'orbite de rotation deuxième.
Toujours de préférence, le générateur sans charge
de la présente invention plus comprend une pluralité de première de première
induction magnétique des noyaux secondaires fournis à respectifs périphérie
extérieure des premiers noyaux primaires induction magnétique et ayant chacun
first et second couplage des trous et une première pluralité de deuxième
induction magnétique des noyaux secondaires fournis sur des périphéries
extérieurs respectifs des noyaux primaires deuxième induction magnétique et chacune
ayant des troisième et quatrième trous de couplage. Les premier accouplement
induction magnétique cores sont insérés dans les trous de couplage premier et
troisième de coupler l'induction magnétique de première et deuxième des noyaux
secondaires, et les deuxième couplage induction magnétique cores sont insérés
dans les trous de couplage deuxième et quatrième de coupler l'induction
magnétique de première et deuxième des noyaux secondaires.
Par ailleurs, le générateur sans charge de la
présente invention a de préférence une première pluralité des premières bobines
sensibles disposés dans le sens de rotation sur le sida de rotation zigzag
connectés entre eux et une première pluralité de deuxième bobines sensibles
disposés dans le sens de rotation sur l'axe de rotation zigzag connectés les
uns aux autres.
Alternativement, dans le générateur sans charge de
la présente invention, de préférence la première pluralité est égale à 8, et
les 8 bobines sensibles premiers disposés dans le sens de rotation sur l'axe de
rotation sont zig-zag connecté les uns aux autres et le second 8 bobines
sensibles disposés dans le sens de rotation sur l'axe de rotation sont zigzag
reliés entre eux.
En conséquence, un avantage principal de la
présente invention est que deux bobines réactifs enroulées respectivement dans
des directions opposées autour un noyaux de fer appariés sont connectés pour
annuler l'inverse des forces magnétiques générées par les courants inverses
(courants induits) circulant dans les deux bobines réceptifs, afin que la
charge secondaire qui entrave la rotation du rotor est totalement empêchée, et
donc un générateur sans charge peut être fourni qui est soumis à juste une
charge qui est égale ou inférieure à la mécanique charger lors de la production
d'énergie électrique n'est pas fait, c'est-à-dire la rotation charge même
lorsque le générateur est utilisé au maximum.
Un autre avantage de la présente invention est que
la force magnétique inverse, que l'on trouve dans les générateurs classiques,
en raison inverse actuel qui se produisent lorsque le rotor tourne n'est pas
générée, et en conséquence la charge d'énergie sauf la gravité primaire du
rotor et de l'énergie dynamique du rotor est éliminé pour augmenter la quantité
de production d'électricité par rapport au système de la génération de
puissance électrique conventionnelle et accroître ainsi la production d'énergie
électrique et l'efficacité économique.
BRÈVE DESCRIPTION DES DESSINS
Fig.1 est une vue en
coupe transversale d'un générateur de type de champ tournant selon un mode de
réalisation de la présente invention illustrant un arrangement, un aimant
permanent, de carottes de l'induction magnétique et de bobines.
Fig.2 est une vue
partielle de schématique illustrant un tableau magnétique du rotor à un aimant
permanent et un arrangement de l'une des bobines magnétiquement sensibles
placés autour de ce rotor dans un mode de réalisation de la présente invention.
Fig.3 illustre une structure des bobines magnétiquement sensibles et des carottes dans la réalisation de la présente invention.
Fig.4 est une vue en
plan élargie de noyaux magnétiquement sensibles et des portions de la bobine du
générateur de la présente invention illustrant le flux magnétique traverse sans
charge.
Fig.5 est une vue éclatée autour d'un axe central montrant l'interconnexion des bobines de champ magnétique qui sont respectivement enroulés autour des noyaux tertiaire qui entoure le rotor à aimant permanent à la Fig.1 selon la présente invention.
Fig.6 illustre la génération de la charge secondaire dans un générateur conventionnel.
MEILLEURS MODES DE RÉALISER L'INVENTION
La structure et le fonctionnement d'un générateur sans charge selon la présente invention sont maintenant décrits en conjonction avec les dessins. Fig.1 illustre une structure transversale croisée du générateur sans charge de l'invention perpendiculaire à un axe de rotation 3. Fig.2 partiellement illustre une structure transversale croisée du générateur sans charge de l'invention en parallèle à rotation axe 3. Plus précisément, à la Fig.2, seul des huit séries d'induction magnétique primaire cores 4 et 4' disposées autour de l'axe de rotation 3 tel que décrit ci-dessous est montré représentativement.
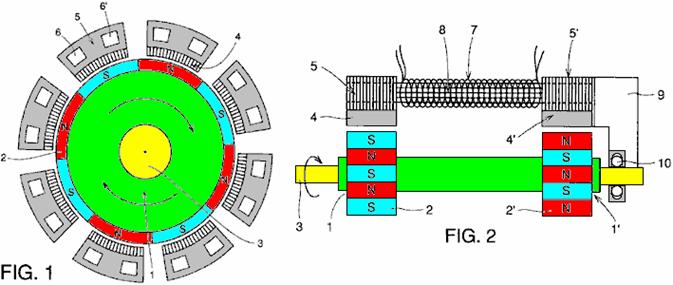
Se référant à la Fig.1 et Fig.2, la structure du générateur sans charge de l'invention est maintenant décrite. Aimant permanent cycles 2 et 2' sont attachés et fixés aux orbites respectives de gauche et droite 1 et 1' fourni par rapport à l'axe de rotation 3 avec un certain intervalle entre eux. Aimant permanent s'entraîne 2 et 2' sont fixés sur des orbites gauche et droite 1 et 1' respectivement telles que les polarités sur la surface périphérique externe de chaque aimant forment par rapport à l'axe de rotation sont alternativement les pôles N et poteaux S. Les trains de l'aimant permanent sont pivotant autour de l'axe. En outre, les polarités face vers des respectifs à un aimant permanent forment 2 et aimant permanent train 2' par rapport à la direction de l'axe de rotation 3 sont disposés à être opposé.
Comme illustré à la Fig.2, axe de rotation 3 et un étui de 9 sont rejoints par un palier 10 à une certaine distance de l'aimant permanent s'entraîne 2 et 2'. À une distance prédéterminée d'aimant permanent s'entraîne 2 et 2', induction magnétique primaire carottes 4 et 4' ai bobines enroulées autour d'eux et sont fixés au boîtier 9. En outre, les cœurs d'induction magnétique secondaire 5 et 5' chacun avec deux trous de couplage 6 et 6' formé y sont structurées par empilage et couplage à une pluralité de carottes minces attaché et fixe à induction magnétique primaires carottes 4 et 4' respectivement et les noyaux secondaires sont attachés et fixés au boîtier 9. Induction magnétique tertiaire cores 8 et 8' sont insérés respectivement en couplant les trous 6 et 6' de l'induction magnétique secondaire cores 5 et 5' donc quant à induction magnétique de couple secondaire cores 5 et 5' de l'autre.
Réactivité des bobines 7 et 7' sont enroulés dans des directions opposées entre elles autour de noyaux respectifs induction magnétique 8 et 8'. Fig.3 illustre une structure formée de noyaux secondaires de l'induction magnétique 5 et 5', induction magnétique cores 8 et 8' et bobines réactifs 7 et 7' lus dans la direction perpendiculaire à l'axe de rotation 3. Comme expliqué ci-dessus, les indications des enroulements de bobines réactifs 7 et 7' sont, respectivement, en face de l'autre autour de noyaux de l'induction magnétique 8 et 8' quel couple induction magnétique secondaire cores 5 et 5'.
Dans la structure décrite en conjonction avec la Fig.1, Fig.2 et Fig.3, lorsque l'axe de rotation 3 de l'alternateur tourne, les trains magnétiques permanents 2 et 2' tourner en conséquence pour générer des courants sensibles aux champs magnétiques (courant électromagnétique induit) enroulés réactif 7 et 7' et le courant ainsi produit peuvent être étirés pour utilisation.
Comme illustré à la Fig.3, les bobines sont enroulés sur les carottes de l'induction magnétique 8 et 8' respectivement dans les directions opposées dans le générateur de la présente invention et les directions des champs magnétiques générés par la circulation des courants induits disposées de telle sorte que les pôles N et S pole alternativement se produit autour de l'axe de rotation 3.
Fig.4 illustre les champs magnétiques induits dans un ensemble de noyaux secondaires induction magnétique 5 et 5', les cœurs de l'induction magnétique 8 et 8’ et bobines réactifs 7 et 7’.
À bandes de fer aux deux extrémités de l'induction
magnétique respectifs des noyaux secondaires 5 et 5’, le champ magnétique actuel inverse est généré par la
bobine sensible 7 lors de la
rotation des pôles N et S de trains de l'aimant permanent 2 et 2’ est dans le sens de MA
montré à la Fig.4, par exemple,
alors qu'un champ magnétique actuel inverse, généré par la bobine sensible 7 est en direction de MB dans la Fig.4. Par conséquent, les
champs magnétiques inverses générés par la circulation des courants s'annulent
mutuellement. Les noyaux sont formés
d'une pluralité de bandes de fer afin d'éliminer la chaleur générée par les
courants de Foucault.
Le champ magnétique du rotor n'a donc aucun
dépendance à la circulation des courants, la charge causée par le phénomène de
la magnétisation induite disparaît, et l'énergie de mouvement nécessaire pour
la rotation contre la mécanique de la charge principale du rotor lui-même est
appliqué au rotor.
À cette époque, un circuit magnétique, y compris
l'induction magnétique secondaire cores 5
et 5' et induction magnétique tertiaires carottes 8 et 8' doit être façonné en forme “ quadrature “. Si le circuit n'est pas structuré comme “ quadrature
“ forme, une partie des fonctions inverses de champ magnétique comme force
électrique qui empêche la force de rotation du rotor.
De plus, aimant permanent s'entraîne 2 et 2' du rotor sont disposés à avoir des pôles opposés les uns aux autres sur les côtés droit et gauche comme sur la Fig.2 pour constituer l'écoulement du flux magnétique. Chaque rotor a organisé alternativement les aimants, par exemple, huit pôles sont fournis pour améliorer l'efficacité du générateur.
Une description plus détaillée du principe opérationnel est donnée maintenant. Lorsque le rotor à la Fig.1 tourne une fois, S et N pôles d'aimants permanents 2 et 2’ attaché à la périphérie du rotor successivement l'offre des champs magnétiques à noyaux primaires induction 4 ci-dessus et champ magnétique est généré en conséquence dans un chemin d'accès d'une orbite du rotor le long de la base primaire induction 4, noyau secondaire induction 5, base tertiaire induction 8, induction secondaire core 5', induction primaire core 4' à l'autre orbite du rotor comme sur la Fig.2.
En conséquence, le courant circule dans les
bobines touchés par ce champ électrique pour produire de l'énergie électrique. Par exemple, si l'énergie produite est
utilisée comme sortie générée pour allumer une ampoule électrique ou pour
l'utiliser comme énergie motrice, le courant traversant les bobines génère les
champs magnétique inverses. Toutefois, cette inversion des champs magnétiques
n'influencent pas les aimants permanents 2
et 2' attaché au rotor sur la Fig.2 depuis
les champs magnétique inverses de même grandeur respectivement de S et N ou N
et S sur les deux extrémités de l'induction magnétique secondaire cores 5 et 5' s'annulent mutuellement comme
illustré à la Fig.4. Pour cette raison, le rotor est dans un état
vide dans laquelle toute résistance sauf le poids du rotor lui-même et
résistance dynamique n'est pas exercée sur le rotor.
Fig.5 illustre une manière de relier magnétiquement sensibles bobines 7 et 7' enroulé autour de l'induction magnétique tertiaire cores 8 et 8' à huit pôles.
Se référant à la Fig.5, selon un procédé de connexion magnétiquement sensibles bobines 7 et 7', ligne 1a1 de bobine sensible 7' (une ligne interminables du fil enroulé autour d'un premier noyau de l'induction magnétique 8) est relié à la ligne 1a2' (une seule ligne d'interminables du fil enroulé autour d'un noyau d'induction magnétique deuxième 8), puis la ligne 1a2 (l'autre ligne d'interminables du fil enroulé autour d'un noyau d'induction magnétique deuxième 8) est connectée à la ligne 1a3' et par la suite les lignes 1a et 1a' sont connectés successivement en zigzag manière permettre actuel s'écouler. Bobine supplémentaire, réactif 7 est organisé à Bancher représenté par 1b1 de manière zigzag tel qui tapisse 1b et 1b' sont connectés successivement. Dans ce cas, lignes 1b, 1b' et les lignes 1a et 1a' des bobines magnétiquement sensibles respectives 7 et 7' sont connectés. Dans l'ensemble, totales quatre fils électriques sont étirés pour utilisation.
Lorsque l'énergie électrique doit être généré selon la présente invention comme décrit ci-dessus, en particulier, un circuit fermé est formé par des bobines réactifs 7 et 7', courants électriques sont induits dans des bobines réactifs 7 et 7' enroulé autour les carottes d'induction magnétique du générateur et les champs magnétiques induits, produites respectivement par des bobines réactifs 7 et 7' pourrait causer une grande charge qui interfère la force de rotation du rotor. Cependant, comme illustré à la Fig.4, la direction de convolution d'une bobine 7 est opposée à celle de l'autre bobine 7' afin que la force magnétique générés par les courants inverses (courants induits) en bobines réactifs 7 et 7' plaie autour de base de l'induction magnétique 4 n'est pas transmise à induction magnétique carottes que 8 et 8’ en conséquence aucune inverse magnétique force est transmise à aimants permanents 2 et 2'.
Par
conséquent, chaque fois que les pôles N et les pôles S alternent avec l'autre
en raison de l'alternance des aimants permanents 2 et 2' de Fig.2, les
forces magnétiques inverses en direction droite et gauche opposé au sens de
flèches indiqué par MA et MB complètement disparaître comme
illustré à la Fig.4. En
conséquence, l'inverse les forces magnétiques causées par les courants inverses
ne sont pas influencés par des aimants permanents 2 et 2' et par conséquent sans charge, sauf la mécanique de la
charge principale s'exerce sur le générateur de l'invention.
Tel que discuté ci-dessus, le générateur sans
charge de la présente invention, charge secondaire sauf la charge mécanique du
générateur, c'est-à-dire la charge causée par les courants inverses qui coule à
travers les serpentins sensibles peut être nulled. En ce qui concerne ce générateur sans charge,
même si 100 % du courant généré par induction magnétique (induction
électromagnétique) est utilisé, la charge magnétique secondaire en raison des
courants inverses sauf la mécanique de la charge principale ne sert pas sous
charge.
Bien que le nombre de pôles du rotor est décrit
comme 8 la description ci-dessus, la
présente invention n'est pas limitée à une telle structure, et l'invention peut
montrer son effet lorsqu'elle est le plus petit ou plus grand nombre de pôles
est appliqué.
En outre, bien que l'aimant du rotor est décrit
comme l'aimant permanent dans la structure ci-dessus, l'invention n'est pas
limitée à ce cas et l'aimant du rotor peut être un électro-aimant, par exemple.
En outre, bien que la description ci-dessus
s'applique à la structure de la génératrice de type de champ tournant, le
générateur peut être du type armature tournante.
Une description plus détaillée de la génératrice
de la présente invention est donnée ci-après basé sur des exemples précis et
expérimentales de l'invention. Le
générateur de la présente invention et un générateur conventionnel ont été
utilisés pour mesurer l'efficacité de production d'énergie électrique et la
quantité de charge et de comparer les mesures qui en résultent.
EXEMPLE EXPÉRIMENTAL 1
Un générateur de 12 pôles courant alternatif (CA)
pour la recharge de la batterie a été utilisé, et la production d'électricité
et de la charge lorsque 50 % de la production d'électricité a été utilisé ainsi
que ceux quand 100 % de la production d'électricité ont été utilisés ont été
mesurés. Le générateur ci-dessus est un
moteur à courant alternatif monophasé et la source d'alimentation indépendants
a 220V, avec 1750 tr/min et l'efficacité de 60 %. Le résultat de mesure à l'aide de la puissance
d'un moteur de 0.5HP et ampère. times.volt calibre est indiqué au Tableau 1.
EXEMPLE EXPÉRIMENTAL 2
Mesure a été effectuée dans les mêmes conditions
que celles de l'exemple expérimental 1 et un générateur utilisé est celui qui a
été effectuée selon la présente invention d'avoir les mêmes conditions que
celles du produit du modèle existant ci-dessus. Le résultat de la mesure à
l'aide d'ampères x volts jauge s'affiche dans le Tableau 1.
Tableau 1
|
|
50% Électricité |
utilisée |
100% Électricité |
utilisée |
|
Type de générateur |
Sortie électrique ( |
Charge
électrique ( |
Sortie électrique (Watts) |
Charge électrique ( |
|
Classiques : |
100 |
221 |
14 |
347 |
|
Cette invention : |
100 |
220 |
183 |
200 |
Par le résultat de l'expérimental exemple 1
ci-dessus, la raison de la réduction remarquable de la production d'électricité
lorsque la consommation d'électricité a été de 100 % par rapport à la
consommation d'électricité de 50 % dans le générateur conventionnel est
considérée à l'augmentation significative de la charge de répulsion exercée sur
le générateur lorsque 100 % de l'électricité est utilisée.
En revanche, dans le générateur de la présente
invention, il y n'avait aucune différence appréciable au montant de la charge
entre les cas où 50 % de l'électricité a été utilisé et 100 % de celui-ci a été
utilisé respectivement. Au contraire, le
montant de la charge a légèrement diminué (environ 20W) lorsque 100 % de
l'électricité a été utilisé. À cet égard,
on peut comprendre que la quantité d'énergie électrique produite du générateur
de la présente invention est approximativement doublée comme les augmentations
de consommation d'électricité, qui diffère de la génératrice conventionnelle
produisant une puissance électrique qui diminue brusquement lorsque la
consommation d'électricité augmente.
En conclusion, la quantité de charge au-dessus de cense pour être valeur numérique par rapport à la charge mécanique du générateur comme décrit ci-dessus. Toute secondaire charger sauf cela, c.-à-d. charge due à l'inverses courants générés dans les bobines de réactif induit peut être confirmé comme zéro.
EXEMPLE EXPÉRIMENTAL 3
Des
générateurs de courant continu (CC) de 12V ayant des conditions similaires à
celles de l'exemple expérimental 1 ont servi à effectuer des mesures dans les
mêmes conditions (rendement 80 %). Le
résultat de la mesure est présenté ci-dessous.
Tableau 2
|
|
50% Électricité |
utilisée |
100% Électricité |
utilisée |
|
Type de générateur |
Sortie électrique ( |
Charge
électrique ( |
Sortie électrique ( |
Charge électrique ( |
|
Classiques : |
103 |
290 |
21 |
298 |
|
Cette invention : |
107 |
282 |
236 |
272 |
Le générateur CC a un rendement plus élevé (80 %)
que celle du générateur CA, tandis que l'utilisation de la brosse augmente le
coût du générateur CC. 100 % de l'électricité a été utilisé, la quantité de
charge a légèrement diminué qui était semblable au résultat indiqué dans le
Tableau 1 et la production d'électricité était d'environ au moins 2,2 fois que
lorsque 50 % de l'électricité a été utilisé.
EXEMPLE EXPÉRIMENTAL 4
Un générateur de courant alternatif monophasé (CA) de 220V (0.5HP) ayant des conditions similaires à celles de l'exemple expérimental 1 a été utilisé, et la rotation par minute (tr/min) a été modifiée pour faire la mesure en vertu de la condition de la consommation de 100 % de l'électricité produite. Le résultat de mesure est illustré dans le Tableau 3 suivant.
Tableau 3
|
1750 |
rpm |
3600 |
rpm |
5100 |
rpm |
|
Sortie électrique ( |
Charge électrique ( |
Sortie électrique ( |
Charge
électrique ( |
Sortie électrique ( |
Charge
électrique ( |
|
130 |
160 |
210 |
228 |
307 |
342 |
Comme indiqué dans le tableau 3 ci-dessus, que la
rotation par minute (tr/min) augmente à partir de 1750, 3600 à 5100, la
quantité de courant électrique augmente respectivement de 130, 210 à 307W et,
par conséquent, la différence entre la quantité d'énergie électrique produite
et la quantité de charge diminue pour provoquer une baisse relative de la
quantité de charge que la rotation par minute (tr/min) augmente.
EXEMPLE EXPÉRIMENTAL 5
Mesure a été fait en changeant le nombre de pôles
N et S des aimants permanents de l'invention dans les mêmes conditions que
celles de l'exemple expérimental 1, et à condition que 100 % de l'électricité
produite a été utilisé.
Le résultat de la mesure est illustré ci-dessous.
Tableau 4
|
2 |
pôles |
4 |
pôles |
8 |
pôles |
|
Sortie électrique ( |
Charge
électrique ( |
Sortie électrique ( |
Charge
électrique ( |
Sortie
électrique ( |
Charge électrique ( |
|
80 |
152 |
130 |
200 |
265 |
296 |
Tableau 4 ci-dessus,
elle peut être comprise que comme l'augmentation du nombre de pôles, tous deux
des montants de généré augmentation de puissance et de charge électrique. Toutefois, le rapport entre la quantité
d'énergie électrique produite à la quantité de charge augmente monotone. Dans le tableau ci-dessus, en termes de
charge, seulement la charge primaire mécanique est exercée et électrique
secondaire n'est pas exercée.
L'augmentation du nombre de pôles provoque
l'augmentation, par le nombre de pôles accrues, le nombre de lignes de flux
magnétique qui bobines traversent, et en conséquence la force électromotrice
augmente afin d'augmenter la quantité d'énergie électrique produite. En revanche, la quantité de charge mécanique a
une valeur constante quel que soit l'augmentation du nombre de pôles, afin que
la quantité de charge mécanique diminue relativement afin de réduire la
différence entre le montant de la charge et la quantité d'énergie électrique
produite.
Description détaillée de la présente invention qui
a été donnée ci-dessus est juste dans le but de présenter l'exemple et
illustration, pas de limitation. Il sera très cher apprécié que l'esprit et la
portée de l'invention seront limitées seulement par la portée de jointe des
revendications.
ALBERTO MOLINA-MARTINEZ: AUTO-ALIMENTÉ GÉNÉRATEUR D'ÉLECTRICITÉ
Demande de brevet U.S. 20020125774
6 mars 2002 Inventeur: Alberto
Molina-Martinez
AUTO-ALIMENTÉ
GÉNÉRATEUR D'ÉLECTRICITÉ
Cette demande de brevet
montre les détails d'un dispositif qui elle est revendiquée, peut produire
suffisamment d'électricité pour alimenter elle-même et charges externes. Il n'a
également aucuns pièces mobiles.
RÉSUMÉ
Un noyau électromagnétique
cylindrique fixe, formé d'une seule pièce de lamelles minces empilés jusqu'à la
hauteur désirée, ayant fermé des emplacements distribués radialement, où les
deux arrangements de bobinage triphasé sont placés ensemble dans les mêmes
emplacements, au centre, à l'extérieur, dans le but de créer un champ
électromagnétique de rotation en appliquant temporairement un moteur triphasé
courant à l'un des enroulements et par ce moyen, innovateurs en intronisant une
tension sur le second, de telle sorte que l'énergie sortant est beaucoup
supérieure à l'entrée. Un retour sera de
rétroaction du système et la source temporaire est alors déconnectée. Le
générateur se déroulera par elle-même indéfiniment, en permanence, générant un
grand excès d'énergie.
CONTEXTE DE L'INVENTION
1. Domaine de
l'Invention
La présente invention
se rapporte généralement aux systèmes de centrales électriques. Plus
spécifiquement, la présente invention concerne auto-alimentation électrique
groupes électrogènes.
2. Description de l'Art
connexe
Étant donné que Nikola
Tesla a inventé et breveté son système polyphasé générateurs, moteurs à
Induction et transformateurs, aucune amélioration essentielle n'a été déposée
dans le domaine. Les générateurs produirait les tensions polyphasées et courants
au moyen du mouvement de rotation mécanique afin de forcer un champ magnétique
pour faire pivoter dans l'ensemble de la génératrice radialement espacement des
enroulements. La base du système moteur
induction était de créer un champ électromagnétique tournant, au lieu d'un
champ magnétique mécaniquement pivoté, qui induiraient des tensions et des
courants pour générer des forces électromotrices utilisables comme énergie
mécanique ou électrique. Enfin, les transformateurs
manipulerait les tensions et les courants pour les rendre faisable pour leur
utilisation et la transmission sur de longues distances.
Dans tous les
générateurs électriques présente une petite quantité d'énergie, normalement
moins d'un pour cent du pouvoir sortant en gros générateurs, est utilisé pour
exciter les pôles électromagnétiques mécaniquement pivotés qui vont entraîner
des tensions et des courants dans des conducteurs ayant une vitesse relative ou
le mouvement entre eux et les masses polaires.
Le reste de l'énergie
utilisée dans le processus d'obtention d'électricité, est nécessaire pour
déplacer les masses et à surmonter les pertes du système : pertes mécaniques ;
pertes de charge ; brosses, pertes de dérive ; pertes de réaction induit ;
pertes d'entrefer ; pertes de réactance synchrone ; pertes de courant de
Foucault ; pertes par hystérésis, qui, en même temps, tous sont responsables de
l'excès de puissance d'entrée (puissance mécanique) requis pour générer
toujours plus de petites quantités d'énergie électrique.
RÉSUMÉ DE L'INVENTION
Le générateur
électrique continu comprend un noyau cylindrique électromagnétique
stationnaire, fait de lamelles minces monobloc, un sur l'autre pour former un
cylindre, où les arrangements de deux enroulements triphasés sont placées dans
les mêmes emplacements de ne pas avoir n'importe quel vitesse relative physique
ou le déplacement entre eux. Lorsqu'un des enroulements est connecté à une
source temporaire de tri-phasé, un champ électromagnétique tournant est créé,
et le champ ainsi créé permettra de réduire les bobines fixes de la deuxième
enroulement, innovateurs en intronisant les tensions et courants. De la même
manière et étendue comme générateurs de courants, environ un pour cent ou moins
de la puissance sortante sera nécessaire pour maintenir le champ magnétique
rotation excité.
Dans le générateur
électrique continu, il n'y a pas de pertes mécaniques ; pertes de charge ;
pertes de brosse ; pertes de dérive ; pertes de réaction induit ; ou pertes
d'écart, l'air car il n'est pas n'importe quel mouvement d'aucune sorte. Il y
a: pertes de réactance synchrone, les pertes de courant de Foucault et les
pertes d'hystérésis, qui sont inhérentes à la conception, la construction et
les matériaux du générateur, mais dans les mêmes conditions que les générateurs
de courants.
Un pour cent ou moins
de l'énergie totale produite par les générateurs électriques présents va à
créer leur propre champ magnétique ; une énergie mécanique qui est supérieure à
la production totale des générateurs présents est utilisé pour faire tourner
dans le processus d'extraction des courants électriques de leur part. Dans le
générateur électrique continu, il n'y a aucun besoin de mouvement puisque le
champ est en fait déjà tourner electro-magnétique, donc tout ce que mécanique
énergétique ne sera pas nécessaire. Dans des conditions similaires des courants passionnants, core design
masse et enroulements, le générateur électrique continu est significativement
plus efficace que les générateurs présents, qui signifie aussi qu'elle peut
produire beaucoup plus de l'énergie, qu'il a besoin pour fonctionner. Le
générateur électrique continu peut rétroaction du système, la source temporaire
peut être déconnectée et la génératrice fonctionnera indéfiniment.
Comme avec n'importe
quel autre générateur, le générateur électrique continu peut exciter son propre
champ électromagnétique avec une part minimale de l'énergie électrique
produite. Le générateur électrique continu n'a besoin d'être démarré en
connectant ses enroulements triphasés orienter d'une source externe triphasé
pour un instant, et puis être déconnecté, pour démarrer le système comme décrit
ci-après. Puis, déconnecté, il sera exécuté indéfiniment générant un grand
excès d'énergie électrique dans la mesure de sa conception.
Le générateur
électrique continu peut être conçu et calculé avec toutes les formules
mathématiques utilisées aujourd'hui pour concevoir et calculer des moteurs et
des générateurs électriques. Il est conforme à toutes les lois et les
paramètres utilisés pour calculer l'induction électrique et production
d'électricité aujourd'hui.
À l'exception de la Loi
de Conservation de l'énergie, qui, en soi, n'est pas une équation mathématique
mais un concept théorique et par la même raison n'a aucun rôle dans le calcul
mathématique d'un générateur électrique de tout type, le générateur électrique
continu est conforme à toutes les lois de la physique et génie électrique. Le
générateur électrique continu oblige à revoir la Loi de Conservation de
l'énergie. Dans ma conviction personnelle, l'électricité est jamais venue de
l'énergie mécanique que nous avons mis dans une machine à déplacer les masses
contre toutes les oppositions. Le système mécanique est effectivement,
prévoyant la condensation de l'électricité, le chemin d'accès. Le générateur
électrique continu fournit un chemin plus efficace pour l'électricité.
DESCRIPTION
DES DESSINS
Fig.1 montre un mode
de réalisation de la présente invention.
Fig.2 montre un
schéma de câblage interne pour la réalisation de la présente invention montrée Fig.1.
Fig.3 montre un
stratifié unique pour une autre incarnation de la présente invention.
Fig.4 montre un
stratifié unique en deux parties pour une autre incarnation de rechange de la
présente invention.
Fig.5 montre un schéma de câblage pour un mode de réalisation de la présente
invention, construite à partir du stratifié montré dans Fig.3 ou Fig.4.

Fig.6 présente le
modèle de flux magnétique produit par la présente invention.
Fig.7 montre les
profils de la rotation de champ magnétique produites par la présente invention.

Fig.8 montre le
système complet de la présente invention.
Fig.9 est une vue
élargie de rechange réalisation de la présente invention, illustrée à la Fig.3
ou Fig.4.

DESCRIPTION DÉTAILLÉE DE L'INVENTION
La présente invention est un générateur
électrique autonome, capable de produire plus d'énergie qu'il a besoin pour
fonctionner, et qui donne l'énergie nécessaire pour l'exploitation
continue. L'idée de base consiste en
l'induction des tensions électriques et des courants sans mouvement physique
par l'utilisation d'une rotation champ magnétique créé par un redresseur
triphasé connecté temporairement à une source triphasée et de placer les
conducteurs fixes sur le chemin de ladite rotation champ magnétique, éliminant
le besoin de forces mécaniques.
Le système de base peut
être observé à la Fig.1, qui montre un mode de réalisation de la
présente invention. Il y a un noyau
ferromagnétique fixe 1 avec un bobinage triphasé orienter 3,
espacés de 120 degrés et relié en Y 6 afin de fournir un champ
électromagnétique tournant, lorsqu'une tension triphasée est appliquée ; pour
le cas, un arrangement de deux pôles. À
l'intérieur de ce noyau 1 il existe un deuxième noyau ferromagnétique
fixe 2, sans espace entre eux, il s'agit, avec aucun entrefer. Ce second noyau 2 a aussi arrangement de bobinage triphasé
stationnaire (4a dans la Fig.4 et 4b sur la Fig.2),
aligné comme illustré dans la Fig.1 et Fig.2 avec le noyau
externe innovateurs en intronisant enroulements 3. Il n'y a pas tout mouvement entre les deux cœurs,
puisqu'il n'y a aucun espace d'air entre eux.
Il n'y a aucun arbre
sur chaque noyau étant donné que ceux-ci ne tournent pas de carottes. Les deux cœurs sont possibles de tôles
isolées empilés ou d'isolé poudre ferromagnétique compressée et servile. Le système fonctionne de toute façon,
innovateurs en intronisant tensions triphasées et des courants sur les conducteurs
fixes 4a de la les enroulements internes 4b, application de
courants triphasés aux bornes A 5a, B 5b et C 5c des
enroulements externes 3 ; ou innovateurs en intronisant tensions
triphasées et des courants sur les enroulements externes 3, en
appliquant des courants triphasés aux terminaux T1 7a, T2 7b et T3
7c, de la les enroulements internes 4b. Lorsqu'une tension triphasée
est appliquée aux bornes A 5a, B 5b et C 5c, les courants
auront la même grandeur, mais seront déplacés dans le temps par un angle de 120
degrés. Ces courants produisent magnéto motrice-forces, qui, à leur tour, créent
un flux magnétique rotationnel. Les
modalités peuvent varier considérablement, comme ils se produisent à présents
alternateurs et moteurs triphasés, mais les bases restent les mêmes, un champ
magnétique stationnaire mais electro-magnétique rotatif, innovateurs en
intronisant les tensions et courants sur les conducteurs fixes placés sur le
chemin de ladite champ magnétique tournant.
Le diagramme montre un arrangement bipolaire pour les deux enroulements,
mais beaucoup d'autres arrangements peuvent être utilisés, comme dans la
commune de génératrices et moteurs.
Fig.2 montre l'arrangement des trois phases de la 4b bobinage interne
qui a fourni, en pratique, les tensions symétriques et les courants, en raison
d'un espace angle de 120 degrés. Il est
similaire à un arrangement de deux pôles.
Nombreux autres arrangements poly-phase ou trois phases peuvent être
utilisés. Chaque fois qu'un chef
d'orchestre est traversé par un champ magnétique rotation, est induite une
tension entre ses bornes. Les
interconnexions dépendent de l'utilisation que nous donnerons au système. Dans
ce cas, nous aurons une tension triphasée dans les terminaux T1 7a, T2
7b et T3 7c et un neutre 8.
La tension sortante dépend de la densité du flux magnétique rotation, le
nombre de tours de la chef d'orchestre, de la fréquence (au lieu de la vitesse)
et de la longueur du conducteur traversé par le champ, comme dans n'importe
quel autre générateur.
Fig.3 montre une
autre réalisation de l'invention présente où le générateur est fabriqué à
partir de plusieurs lamelles monobloc 9, empilées comme une bouteille à
la hauteur souhaitée. Cette réalisation
est possible aussi d'un bloc d'une pièce de poudre ferromagnétique isolant
compressé et servile. Le même logement 10
accueillera l'interne 4a/4b et les enroulements externes 3,
c'est-à-dire les innovateurs en intronisant et les enroulements induits (voir Fig.5). Dans ce cas, un stratifié de 24 emplacements
est montré, mais le nombre de créneaux horaires peut-être varier
considérablement selon la conception et les besoins.
Fig.4 montre un
stratifié unique en deux parties pour une autre incarnation de rechange de la
présente invention. Pour les effets concrets de la stratification se divisent en
deux morceaux 9a, 9b, tel qu'illustré, pour faciliter l'insertion des
bobines. Puis, ils sont
solidement assemblés sans séparation entre eux, comme s'ils étaient seulement
une seule pièce.
Les stratifiés décrites ci-dessus peuvent
être construits avec mince (0,15 mm d'épaisseur ou moins) isolé des lamelles 9
ou 9a et 9b d'un matériau à haute perméabilité magnétique et
pertes de faible hystérésis tels que Hiperco 50A, ou similaire, à réduire les
pertes ou avec compressé poudre ferromagnétique électriquement isolé qui a
inférieurs pertes de courant de Foucault et aussi mai ont faible hystérésis
pertes, qui peut rendre le générateur très efficace.
FAIRE FONCTIONNER LA GÉNÉRATRICE
Le générateur électrique continu tel que
décrit et représenté sur les dessins ci-après a été conçu et calculé pour
produire un champ électromagnétique tournant solide avec de faibles courants
d'excitation. En utilisant un
matériau stratifié, tel que le dit Hiperco 50A, on peut atteindre des champs
magnétiques rotatifs au-dessus de deux Teslas, car il n'y a pas de pertes
d'entrefer, aux pertes mécaniques, de pertes par ventilation, les pertes de
réaction d'induit, etc comme dit précédemment.
Ceci peut être obtenu par application d'un courant temporaire triphasé
aux bornes A, B et C 12 de bobines admission selon 13, 14 et 15 (5a,
5b et 5c sur la Fig.1), espacées de 120 degrés l'une de l'autre
(voir Fig.5).
Fig.5 représente la répartition spatiale des enroulements admission selon 13,
14 et 15, ainsi que l'induit enroulements 18a, 18b, 19a, 19b, 20a et 20b. Les deux, le introniser et les enroulements
induits sont placés dans les mêmes fentes 10 ou 16 et 17, avec
des arrangements similaires. Même si le
système fonctionne dans les deux sens, la meilleure configuration semble être de
placer les enroulements admission selon 13, 14 et 15, au centre et le
bobinage induit 18a, 18b, 19a, 19b, 20a et 20b, à l'extérieur, étant
donné que petits enroulements seront nécessaires pour induire une très forte
champ magnétique de rotation, en raison des faibles pertes impliquées dans le
processus, et en échange, enroulements plus grands et les plus puissants seront
nécessaires pour extraire toute l'énergie que le système fournira. Les deux enroulements sont connectés en Y
(non représenté), mais ils peuvent être reliés de diverses façons, comme tout
autre générateur. Ces dispositions sont
équivalentes aux dispositions indiquées pour la réalisation de la Fig.1
et Fig.2.
Les bobines admission selon 13, 14 et 15
sont conçues et calculées de manière à ce que le générateur peut être démarré
avec des lignes triphasées tensions communes (230 Volts 60 Hz par phase, par
exemple). Si les lignes locales des
tensions ne sont pas appropriées, on peut contrôler la tension au niveau conçu
au moyen d'un transformateur variable triphasé, un convertisseur ou variateur
électronique etc Une fois que nous avons un tel champ magnétique fort et un
passage de rotation stationnaire induite bobines 18a, 18b, 19a, 19b, 20a et
20b, une tension triphasée sont induites entre les bornes T1, T2, T3 et
N21 en proportion de la densité de flux magnétique, le nombre de spires
dans les bobines, la fréquence utilisée (à la place de la vitesse), la longueur
des conducteurs coupés par le champ tournant, comme dans tout autre
alternateur. Nous pouvons nous connecter, que nous désirons en Y ou en
triangle, etc, comme dans tout autre alternateur ou générateur. Les courants
sortants seront courants triphasés (ou des courants polyphasés fonction de la
disposition) et on peut avoir un fond neutre 21 si nous utilisons une
connexion de Y, comme dans tout autre alternateur.
Les tensions et les courants alternatifs
sortants sont parfaits ondes sinusoïdales, parfaitement espacées dans le temps,
et totalement symétriques. Les tensions et
les courants obtenus par ce procédé sont utilisables dans n'importe quelle
manière classique. Toute tension peut
être produit, en fonction de la conception.
Fig.6 montre le
diagramme de flux magnétique produit par les enroulements triphasés introniser 13,
14 et 15. Ce modèle est similaire au modèle de stators
d'un moteur à induction. Comme il n'y a
pas d'écart de l'air; l'ensemble du trajet pour le flux magnétique est
homogène, sans modification de matériel.
Le noyau est constitué de tôles minces isolées d'une perméabilité
magnétique élevée et un matériau à faible perte par hystérésis; pertes par
courants de Foucault sont minimes en raison de la stratification mince. Il n'y a pas de contre-flux ou des réactions
d'induit ainsi le flux magnétique peut être proche de la saturation avec une
petite énergie ou l'entrée passionnante.
En raison de la différence de temps entre les trois phases et la
distribution spatiale des enroulements admission selon un champ magnétique
tournant est créé dans le noyau, comme le montre la Fig.7.
Une fois que le
générateur est démarré, une petite partie de l'énergie obtenue est renvoyée (Fig.8
et Fig.9) pour alimenter les bobines admission selon 3 (sur la Fig.1)
ou 13, 14 et 15 (sur la Fig.5), comme dans tout autre alternateur
ou générateur auto-excité. Bien sûr, les
tensions et les phases doivent être parfaitement identiques et alignés, et si
nécessaire, les tensions de réaction doivent être contrôlés et manipulés au
moyen de transformateurs variables, variateurs électroniques, des déphaseurs
(pour aligner les phases) ou autre type de tension ou de phase contrôleurs.
Une méthode possible
consiste en l'utilisation d'un convertisseur électronique ou variateur 25
qui convertit d'abord deux ou trois lignes de courant alternatif en courant continu
24 par un redresseur électronique 26, puis, par voie
électronique, convertit le courant pour le courant 27 triphasé directe à
28 fournir des courants triphasés espacées dans le temps de 120 degrés
pour les champs électromagnétiques A, B et C 3. Certains variateurs ou convertisseurs peut
accepter deux lignes de tension, tandis que d'autres acceptent seulement une
tension de ligne triphasée. Ce mode de
réalisation utilise un variateur de 3 kVA qui accepte deux lignes 220 volts.
Le champ magnétique de rotation
créé par les courants qui traversent les introniser enroulements triphasés 13,
14 et 15, induit une tension entre les bornes T1, T2, T3, N, 29 (7a,
7b, 7c, 8 dans la Fig.2).
Puis, à partir des lignes de courant sortant 29, une dérivation
est faite 30 à réaction du système, la conversion du réaction courants
alternatifs, par l'intermédiaire de redresseurs à diodes électroniques 31,
en courant 32 et réaction convertisseur électronique ou variateur 25
à diriger les bornes de courant continu du redresseur électronique 26
(voir Fig.8). Une fois que la
réaction est connecté, le générateur électrique continu peut être déconnecté de
la source temporaire 24, et continuer à générer de l'énergie électrique
indéfiniment.
Dans la Fig.9,
on peut observer une autre incarnation du générateur électrique continu. Les principes de base restent les mêmes que
pour le mode de réalisation décrit ci-dessus et illustré à la Fig.1 et Fig.2. Les différences fondamentales sont dans la
forme des lamelles et de la distribution physique des enroulements, comme
discuté et illustré précédemment. Une
variante de la rétroaction, en utilisant une variable et le déplacement des
transformateurs sont également indiqué.
Le noyau
ferromagnétique 11 fait de stratifiés monobloc 9 comme sur la Fig.3
(ou deux pour plus de commodité 9a, 9b, tel qu'illustré à la Fig.4)
empilés jusqu'à la hauteur désirée. Les
fentes 10, comme indiqué auparavant, accueillera aussi bien les orienter
13, 14 et 15 et les enroulements induits de 18a-b, 19a-b et 20a-b
dans la même fente 10 ou 16 et 17. L'entrantes triphasé lignes 12,
nourrir les enroulements triphasés orienter 13, 14 et 15. Ils sont nourris, initialement par la source
temporaire 33 dans un premier temps, et par les 34 retour
triphasé une fois le générateur s'exécute par lui-même.
Les enroulements orienter 13, 14 et 15
ont un arrangement de deux pôles, mais beaucoup d'autres arrangements triphasé
ou polyphasées possibles pour obtenir un champ électromagnétique tournant. Ces enroulements sont connectés en Y (non
illustré) de la même manière pour l'incarnation illustrée à la Fig.1, Fig.2
et Fig.8, mais peuvent être connectés de différentes manières. Les enroulements orienter 13, 14 et 15 sont
situés dans la partie interne 16 de la fente c (Fig.5).
Les enroulements
induits 18a-b, 19a-b et 20a-b ont un arrangement de deux pôles,
exactement égal à l'arrangement pour les enroulements orienter 13, 14 et 15,
mais de nombreuses autres dispositions peuvent être prises selon la conception
et les besoins. Les enroulements induits doivent être calculés de façon que le
générateur aura le plus faible réactance synchrone possible et la résistance. De cette façon, la plupart du pouvoir sortant
ira à l'accusation au lieu de rester pour surmonter l'impédance interne. Ces enroulements sont connectés en Y pour
générer un 21 neutre, de la même manière montrée dans la réalisation de
la présente invention, Fig.2, mais peuvent être connectés de manière
différente selon les besoins. Les
enroulements induits 18a-b, 19a-b et 20a-b sont situés dans la partie
externe 17 de la fente 10.
Les lignes sortantes de trois phases et
neutres 21 proviennent des enroulements induits 18a-b, 19a-b et 20a-b.
Rotation champ magnétique créé dans le noyau (voir Fig.6 & Fig.7)
par les enroulements orienter 13, 14 et 15, induit une tension entre les
bornes T1, T2 et T3, plus neutre, 29. De chacune des trois phases sortants lignes 21,
une dérivation retour 34 faite à la rétroaction du système.
La source triphasée temporaire 33 est
temporairement connectée aux bornes A, B et C 12. Le générateur électrique continu doit être démarré
avec une source externe de triphasé pour un instant et puis déconnecté.
Même si la tension de
conduites de retour peut être calculée et obtenue précisément par tabulation
les enroulements induits à la tension requise par les enroulements orienter
(selon le modèle), il peut être pratique placer un transformateur variable de
tri-phasé ou autre type de contrôleur de tension 35 au milieu pour un
ajustement plus précis de la tension de retour.
Placé après le
transformateur variable 35, transformateur triphasé mouvant 36
corrigeront et aligner tout décalage de phase dans les angles de courant et
tension, avant que le retour est connecté.
Ce système fonctionne de la même façon pour le système illustré par la Fig.8
qui utilise un variateur ou un convertisseur 25.
Une fois que la tension
et les phases sont alignés avec la source temporaire 33, les conduites
de retour 34 sont reliés aux lignes entrantes A, B et C 12 à
connexion 37 de la rétroaction et la source temporaire 33 est
alors déconnectée. Le générateur
électrique continu restera fonctionnel indéfiniment sans aucune source
extérieure d'énergie, fournissant un grand excès d'énergie en permanence.
L'énergie électrique
sortant fournie par ce système a été utilisé pour produire la lumière et la
chaleur, exécuter polyphasées moteurs, générer utilisable monophasés et
polyphasés tensions et courants, transformation des tensions et des courants au
moyen de transformateurs, convertissent l'alternatif polyphasé sortant à
courant continu, ainsi que pour d'autres usages. L'électricité obtenue par les moyens décrits
est aussi polyvalent et parfait comme l'électricité obtenue aujourd'hui avec
des générateurs électriques ordinaires.
Mais le générateur électrique continu est autonome et ne dépend pas de
toute autre source d'énergie, mais lui-même dès qu'il s'exécute ; peut être
transporté n'importe où sans limitations ; Il peut être construit dans
n'importe quelle taille et fournit une quantité d'électricité indéfiniment,
selon la conception.
Le générateur
électrique continu est et sera une machine de très simple. La clé de voûte des systèmes réside dans
l'ultra faibles pertes d'un système de génération de non-mouvement ainsi qu'à
une conception très faible réactance synchrone.
Les enroulements
induits doivent être calculés de façon que le générateur peut avoir la plus
faible réactance synchrone possible et la résistance. De cette façon, la
plupart de la puissance sortante ira à l'accusation au lieu de rester pour
surmonter l'impédance interne.
MICHAEL OGNYANOV: DISPOSITIFS À SEMI-CONDUCTEURS
Brevet demande US 3 766 094
20 septembre 1971
Inventeur: Michael Ognyanov
DISPOSITIFS À
SEMI-CONDUCTEURS
Cette demande de brevet
montre les détails d'un dispositif qui elle est revendiquée, peut produire de
l'électricité via un oscillateur à l'état solide. Il est à noter que bien que les détails de
construction sont fournis qui impliquent que l'inventeur construit et testé
plusieurs de ces dispositifs, c'est seulement une demande et pas un brevet
délivré.
RÉSUMÉ
Un bloc d'alimentation
électrique par résonance oscillateur pour faire fonctionner une lampe flash,
par exemple, ou autre appareil électrique, fonctionne sans bouger les pièces
mécaniques ou action électrolytique. Le
bloc d'alimentation est contenue dans une enveloppe métallique cylindrique et à
un mode de réalisation préféré, est couplé à un oscillateur de relaxation et
une lampe à incandescence. Au sein de l'enveloppe, et isolé de celui-ci, est un
semi-conducteur comprimé ayant une base en métal relié au circuit externe. Une sonde métallique entre en contact avec un
point situé sur la tablette de semi-conducteur et avec une tige cylindrique de
ferrite, alignée axialement sur l'enveloppe.
Enroulé sur la tige de ferrite, sont des enroulements hélicoïdes concentriques
désignés comme une " primaire " avec beaucoup de virages et un "
secondaire " avec moins de tours que le primaire.
Une extrémité de la
bobine primaire est reliée à la sonde et l'autre extrémité est reliée à la
bobine secondaire. Les fils de la bobine
secondaire sont connectés à l'oscillateur de relaxation via un condensateur
ajustable. Oscillation dans l'enveloppe
est la résonance amplifiée, et la tension induite dans l'enroulement secondaire
est rectifiée pour application à l'oscillateur de relaxation et de la
lampe. Compositions base semi-conducteur
sélénium et germanium, dont Te, Nd, Rb et Ga dans différentes proportions
superficie utilisée pour la tablette.
CONTEXTE DE
L'INVENTION
Il s'agit d'une
continuation-in-part de mon brevet demande en Serial no 77 452, déposée le 2
octobre 1970, intitulée "Electric Power Pack" maintenant abandonné.
Dans de nombreuses
situations, il est souhaitable d'avoir une source d'énergie électrique qui
n'est pas tributaire des câbles à partir d'une centrale de production, et donc,
les alimentations électriques portables ayant qu'aucune pièce mobile n'ont été
employées. en général, ces blocs d'alimentation portatifs ont été primaires ou
secondaires cellules électrolytiques qui génèrent ou stocker de l'énergie
électrique pour libérer par action chimique.
Ces batteries ont une
quantité limitée d'énergie confinée et doivent souvent être remplacés à
intervalles réguliers pour maintenir l'équipement en fonctionnement.
Ainsi, par exemple, des feux clignotants
sont couramment utilisés le long des voies publiques et autres lieux d'avertir
des conditions dangereuses. Ces feux
clignotants en régions éloignées est généralement incandescente ou connectés à
un certain type d'oscillateur de relaxation alimenté par une batterie de lampes
à décharge. Les batteries employées dans
ces lumières clignotantes ont une durée de vie limitée et doivent être
remplacées périodiquement, en général chaque 250 à 300 heures de
fonctionnement. Il s'agit d'un assez
grand coût de la main-d'oeuvre en remplacement des piles quasiment vide avec
des neuves et des frais supplémentaires pour les cellules primaires ou pour
recharger les accumulateurs. Il est
souhaitable de prévoir un bloc d'alimentation électrique capable de fournir une
quantité suffisante d'énergie électrique pendant une longue période de temps
afin que le nécessaire le remplacement périodique des cellules électrolytiques
peut être évité. Tel un bloc
d'alimentation est précieux, même si les remplacements périodiques requises
sensiblement plus cher que les batteries en raison des coûts du travail
fortement réduites.
BREF RÉSUMÉ DE
L'INVENTION
Il n'y a fourni dans la
pratique de cette invention selon un mode de réalisation préféré, compositions
de semi-conducteur sélectionné dans le groupe composé de :
Sélénium avec, de 4,85
% à 5,5 % du tellure, de 3,95 % à 4,2 % de Germanium, de 2,85 % à 3,2 % de
néodyme et de 2,0 % à 2,5 % Gallium.
Sélénium, de 4,8 % à
5,5 % de tellure, de 3,9 % à 4,5 % de Germanium, de 2,9 % à 3,5 % de néodyme et
de 4,5 % à 5 % de Rubidium, et
Germanium avec, de 4,75
% à 5,5 % du tellure, de 4,0 % à 4,5 % de néodyme et de 5,5 % à 7,0 % Rubidium.
DESSINS
Ceux-ci et d'autres
caractéristiques et avantages de l'invention vont être appréciés et mieux
comprises par référence à la description détaillée suivante d'un mode de
réalisation préféré lorsqu'examiné conjointement avec les dessins suivants :
Fig. 1 illustre dans le schéma éclaté, un feu clignotant, connecté à une
alimentation électrique construite selon les principes de cette invention.
Fig.2 illustre en
coupe longitudinale, le bloc d'alimentation de Fig.1
Fig.3 est un schéma
de câblage électrique du système.
DESCRIPTION
Fig.1 illustre
schématiquement, un feu clignotant typique ayant une alimentation construite
selon les principes de cette invention.
Comme illustré dans cette réalisation préférée, un bloc d'alimentation
électrique 5, est relié électriquement à un circuit oscillateur de
relaxation (montré seulement schématiquement) sur une carte de circuits
imprimés classique 6.
Le bloc d'alimentation 5
et la carte de circuits imprimés sont montés dans un metal case 7, qui a
une partition partielle transversale 8, qui crée deux espaces, un pour
le bloc d'alimentation et de l'autre pour la carte de circuits imprimés qui est
empêchée de prendre contact avec la boîte en métal par n'importe quel montage
isolant commode. De préférence, ces
composants sont en pot en place d'une manière conventionnelle.
Un couvre 9,
comprenant brides 10, est riveté sur la boîte après le montage. Un petit Bornier 11, monté sur un côté
de la case 7, fournit des contacts électriques pour le raccordement à
une charge comme une lampe à incandescence (ne pas montrée à la Fig.1). La lampe fournit un éclair de lumière lorsque
l'oscillateur de relaxation bascule. Bien
que le système décrit est employé pour un feu clignotant, il sera évident que
les autres charges peuvent être alimentés par l'invention.
En Fig.2, le bloc d'alimentation
électrique 10, est illustré en coupe longitudinale et a les dimensions
comme suit : ces dimensions sont fournies à titre d'exemple pour alimenter une
lampe clignotante classique et il sera clair que les autres dimensions peuvent
être utilisées pour d'autres applications.
En particulier, les dimensions peuvent être agrandies afin d'obtenir des
niveaux de puissance plus élevées et une tension différente ou niveaux
actuels. Le bloc d'alimentation est
composé d'un tube métallique cylindrique 16, ayant étroitement raccord
métalliques sélections 17 à chaque extrémité, préférence fermés au tube
d'après que les éléments internes sont insérées en place. Les bouchons 17, qui sont de
préférence de l'aluminium, et un tube en métal 16 forment ainsi une
enveloppe conductrice fermée, qui, dans une réalisation typique, a un intérieur
diamètre d'environ 0,8 pouces et une longueur d'environ 2,25 pouces.
Monté dans une
extrémité de l'enveloppe, c'est qu'une tasse en plastique 18, dont les
dimensions ne sont pas critiques, cependant, une épaisseur de paroi d'au moins
1/16 de pouce est préférée. Monté dans
la tasse en plastique 18 est un semi-conducteur comprimé 19 ayant
un plat de base et un peu bombé côté opposé.
La composition de la tablette de semi-conducteurs 19 est exposée
en détail ci-dessous. En général, la
tablette de semi-conducteurs a une masse d'environ 3,8 grammes. Un disque métallique 21 est positionné
sous la base de la tablette 19 dans la coupe 18 et est
préférablement les collés à l'intérieur de la coupe. Le disque métallique est insérée à la base de
la tablette pour que le bon contact électrique est obtenu sur une zone
importante du semi-conducteur.
Une oreille 22 sur
un bord du disque est soudée à un fil 23, qui s'étend à travers une
gaine isolante court 24 qui passe à travers un trou dans le côté de
l'enveloppe métallique. La gaine
isolante 24 agit comme un passe-fil et fait en sorte qu'il n'y a aucun
dommage à l'isolation de fil 23 et suivantes accidentelle court-circuit
entre le fil et l'enveloppe métallique.
De préférence, la gaine isolante 24 est scellée avec une petite
quantité de colle plastique ou similaire, afin de maintenir la qualité de l'air
intérieur de l'enveloppe cylindrique.
Deux autres ouvertures pour les prospects à travers le tube 16,
comme mentionné ci-dessous, sont également de préférence scellés afin de maintenir
la propreté dans l'enveloppe.
Une paire de métal
circulaire disc 26, est montée à l'intérieur du tube 16 et est de
préférence cimentée en place pour l'empêcher de se déplacer. Les deux disques de 26, sont
équidistants des extrémités opposées de l'enveloppe et sont espacées par un peu
plus de 1,15 pouces. Chacun des disques
a une ouverture centrale 27, et il y a une pluralité de trous 28,
s'étendant à travers le disque dans un tableau circulaire à mi-chemin entre le
centre du disque et sa périphérie. Les
trous 28 sont de préférence dans la gamme de taille d'environ 0,01 à
0,06 pouces de diamètre, et il y a 12 sur chaque disque, situé à 30 degrés
intervalles autour du cercle.
Les deux disques 26 divisent
l'intérieur de l'enveloppe cylindrique en trois chambres, et la configuration
des trous 28 assure la communication entre les chambres et affecte les
propriétés électriques de la cavité. On
croit que la configuration des trous affecte le couplage inductif entre les
cavités à l'intérieur de l'enveloppe et influe sur les oscillations en eux.
Bien qu'un arrangement de 12 trous à 30
degrés centres a été trouvé particulièrement avantageux dans l'incarnation
illustrée, on le trouve dans d'autres arrangements qu'un motif de 20 trous dans
18 degrés centres ou un motif de 8 trous à 45 degrés centres, assure un
fonctionnement optimal. Dans les deux
cas, le cercle des trous 28 est à mi-chemin entre le centre et la
périphérie du disque.
Montés entre les
disques 26 est une bobine en plastique 29 qui a un intérieur
distance de 1,1 pouces entre ses ailes.
La bobine en plastique 29 a de préférence des parois relativement
minces et de 1/8 de pouce de diamètre d'alésage interne. Un plastique montage fiche 31, est
insérée à travers l'ouverture centrale 27 du disque 26 plus
éloigné de la table de semi-conducteurs 19 et dans l'alésage de la
bobine 29. Le bouchon en
plastique 31 est préférablement cimenté au disque 26 afin de
réunir l'Assemblée.
Également monté à
l'intérieur de l'alésage de bobine 29 est un noyau de ferrite
cylindrique 32, 1/8 po de diamètre et 3/4 pouces de long. Il est un noyau de n'importe quel ferrite
magnétique, autres matériaux ferromagnétiques ayant des propriétés semblables
peut être utilisé si vous le souhaitez.
Le noyau 32, est en contact électrique avec une sonde métallique 33
environ 1/4 pouces de long. la
moitié de la longueur de la sonde 33 est sous la forme d'un cylindre
placé au sein de la bobine 29, et l'autre moitié est sous la forme d'un
cône se terminant par un point 34 en contact avec la surface bombée de
la tablette de semi-conducteurs 19 où il fait un contact électrique avec
les semi-conducteurs en un point relativement faible.
Contact électrique
s'effectue également avec la sonde 33 par un fil 36, qui passe à
travers un des trous 28 dans le disque 26 plus proche de la
tablette de semi-conducteurs et de là à une bobine primaire 37, enroulé
sur la bobine en plastique 29. La
bobine primaire 37 est sous la forme de 800 à 1000 spires enroulées sur
toute la longueur de la bobine et le fil de 38 à l'extrémité opposée de
la bobine 37 est soudé à l'un de ses fils externes 39 du bloc
d'alimentation. Ce conducteur 39 se
déroule à travers un des trous 28 dans le disque plus éloigné de la
tablette de semi-conducteurs 19 et grâce à une gaine isolante 41 dans
le tube en métal 16.
Le fil 39 est
également connecté à une extrémité d'une bobine secondaire 42 qui est
composée d'au moins 8 à 10 tours autour de la partie centrale de la bobine
primaire 37. Une feuille
d'isolante mince 43 est fournie entre les enroulements primaires et
secondaires. L'autre fil 44 des
passes bobine secondaire à travers un des trous 28 dans le disque plus
proche de la tablette de semi-conducteurs et de là par une gaine isolante 46
à travers la paroi du tube 16.
Fig.3 illustre
schématiquement, le circuit électrique utilisant un bloc d'alimentation
électrique, construite selon les principes de cette invention. À la gauche de la Fig.3, la
disposition des éléments est illustrée dans une combinaison de position
schématique et mécanique électrique à l'intérieur du tube 16 prêt
corrélation avec l'incarnation, illustrée à la Fig.2. Ainsi, la tablette semiconductor 19,
la sonde 33 et le noyau de ferrite 32 figurent dans les deux leur
arrangement mécanique et électrique, le noyau étant inductif à des bobines, 37
et 42. Le fil 23 provenant de
la base métallique de la tablette de semi-conducteurs 19, est reliée à
un condensateur variable 47, l'autre côté de laquelle est connectée aux
câbles 44 de la bobine secondaire 42. Le fil 44 est également connecté à une
diode redresseur 48 ballottés par une résistance de forte valeur 49.
On verra que le
condensateur variable 47 est dans un circuit résonnant avec les bobines
inductives, 37 et 42 qui sont couplés par le noyau de ferrite 32,
et ce circuit inclut également la tablette de semi-conducteurs 19 jusqu'à
quel point le contact est établi par la sonde 33. L'arrangement mécanique et électrique de ces
éléments fournit une cavité résonnante dans lequel la résonance se produit
quand le condensateur 47 est bien garni.
La diode 48, rectifie les oscillations dans le circuit pour
fournir un contrôleur de domaine approprié pour faire fonctionner une lampe à
incandescence 50 ou un chargement semblable.
La diode redresseur 48
est reliée à un circuit de détente complémentaires-symétrie pour la
commutation de puissance à la charge 50.
La diode est reliée directement au collecteur d'un transistor PNP 51 tend
dans une connexion inversée. l'émetteur du transistor PNP est branché sur le
côté de la charge 50 au moyen d'une résistance de chronométrage 55. La base du transistor 51 est connectée
au moyen d'une résistance 52 et un condensateur 56 au collecteur
d'un transistor NPN 53, l'émetteur qui est branché à l'autre côté de la
charge 50. La base du transistor
NPN 53 est couplée à la diode par une résistance 54. L'émetteur du transistor PNP 51 est
alimenté à la base du transistor NPN 53 par la résistance 55. Courant traversent la lampe 50 est
également limité par une résistance 57 qui couple un côté de la lampe et
l'émetteur du transistor NPN 53 pour les deux bobines, 37 et 42 par
la commune mener 39.
Le bloc d'alimentation
électrique est censé fonctionner en raison d'une amplification de la résonance
une fois une oscillation a été initiée dans la cavité, en particulier la cavité
centrale entre les disques 26.
Cette oscillation, qui apparemment atteint très rapidement les
amplitudes suffisantes pour la puissance utile, est ensuite demi-onde rectifié
pour l'utilisation de la diode 48.
Avec un tel arrangement, on a obtenu un niveau de tension de quelques
volts et puissance suffisante pour fonctionner de façon intermittente d'une
lampe nécessitant environ 170 à 250 milliwatts a été démontrée. L'amplification résonante est apparemment dû à la combinaison
géométrique et électrique des éléments, qui fournissent un couplage inductif de
composants dans un circuit résonnant approprié.
Cette amplification est également, au moins en partie, en raison des
propriétés de semi-conducteur unique dans la tablette 19, qui possède
des propriétés électroniques par une composition donnant un arrangement
atomique unique, dont la nature exacte n'a pas été mesurée.
La tablette de semi-conducteurs a des
propriétés électroniques qui sont déterminées par sa composition, et trois des
semi-conducteurs satisfaisantes pour une utilisation dans la combinaison ont
été identifiés. Dans deux d'entre
elles, le matériau semi-conducteur de base est fourni avec les éléments dopant
adapté de sélénium, et dans la troisième, l'élément de base est de germanium,
dopée aussi convenablement. Les
comprimés de semi-conducteur sont faites par fusion et coulée dans un
arrangement qui donne une structure de gros cristaux. Il n'a pas été jugé nécessaire de fournir une
orientation crystal sélectionnés afin d'obtenir les effets désirés.
Une composition
préférée du semi-conducteur comprend environ 5 % en poids de tellure, environ 4
% en poids de germanium, environ 3 % en poids de néodyme et environ 4,7 % en
poids de rubidium, avec l'équilibre de la composition en sélénium. Une telle composition est possible par la
fusion de ces matières ensemble ou en dissolvant les matériaux en sélénium
fondu.
Une autre composition
très avantageuse a environ 5 % en poids de tellure, environ 4 % en poids de
germanium, environ 3 % en poids de néodyme et environ 2,24 % en poids de
gallium, le reste étant de sélénium. Afin de rendre cette composition, on
trouve souhaitable d'ajouter le gallium très bas point de fusion sous forme de
séléniure de gallium et non du gallium élémentaire.
Une troisième
composition appropriée a environ 5 % en poids de tellure, environ 4 % en poids
de néodyme, environ 6 % en poids de rubidium, le reste étant de germanium. Ces compositions préférées ne sont pas
absolues, et il a été constaté que le niveau de dopant dans les compositions
peut varier dans les limites sans perte significative de la performance. Ainsi, il est constaté que la proportion de
tellure dans la composition préférée peut varier d'environ 4,8 % à environ 5,5
% en poids ; le germanium peut varier d'environ 3,9 % à 4,5 % en poids ;
néodyme peut varier d'environ 2,9 % à 3,5 % en poids, et rubidium varie
d'environ 4,5 % à 5,0 % en poids.
L'équilibre de la composition préférée est sélénium mais il a également
été constaté que le taux d'impuretés nominale peuvent être tolérés et aucun
grand soin n'est nécessaire pour prévenir une contamination mineure.
L'autre sélénium
composition de base utile dans la pratique de cette invention peut avoir une
concentration de tellure dans la plage d'environ 4,85 % à 5,5 % en poids,
germanium dans la plage d'environ 3,95 % à 4,2 % en poids, néodyme dans la
plage d'environ 2,85 % à 3,2 % en poids et du gallium dans la plage d'environ
2,0 % à 2,5 % en poids. Comme dans la
composition préférée, l'équilibre est de sélénium et taux d'impuretés nominale
peuvent être tolérées. Il est préférable
d'ajouter le gallium sous la forme de séléniure de gallium, plutôt que le
gallium élémentaire avec une diminution correspondante dans le sélénium utilisé
pour constituer la composition.
Les compositions de
base de sélénium ci-dessus sont plus faciles à faire et moins cher que la
composition de base de germanium et sont donc préférables pour la plupart des
applications. Il se trouve que ce sont
particulièrement adaptés pour les comprimés de semi-conducteurs relativement
faible jusqu'à environ 1 pouce ou un peu moins.
Pour les comprimés relativement importants, il est préférable d'utiliser
la composition de base de germanium.
La composition de base
de germanium a un niveau de tellure dans la plage d'environ 4,75 % à 5,5 % en
poids, néodyme dans la plage d'environ 4,0 % à 4,5 % en poids et le rubidium
dans la plage d'environ 5,5 % à 7,4 % en poids.
On le trouve également qu'il est plus important pour maintenir la pureté
de la composition en bases germanium que les compositions de base de
sélénium. Bien que les niveaux de pureté
exacte n'ont pas été constatées, il est supérieur à 99 %.
Il a été constaté qu'il
n'est pas nécessaire d'avoir des monocristaux dans les tablettes de
semi-conducteur et toute pratique granulométrie supérieure à environ 1
millimètre semble satisfaisant. Dans les
compositions ci-dessus, lorsque les plages récitées sont dépassées, oscillation
dans le bloc d'alimentation chute rapidement et peut-être cesser complètement.
Les raisons que ces
compositions sont satisfaisantes dans l'arrangement lui procurant
d'amplification de la résonance n'a pas été déterminée avec certitude. Il est possible que le semi-conducteur est
une source d'électrons pour fournir un courant oscillant dans le circuit. Ceci est, bien sûr, combiné avec un contact
relativement grande surface sur le côté de la tablette de semi-conducteur et un
point de contact sur un autre domaine.
Tout courant résonnant dans les bobines enroulées sur la tige de la
ferrite, induit un champ magnétique variable dans la cavité résonnante et le
raccordement électrique entre la tige de la ferrite et la sonde métallique,
fournit une rétroaction de cette oscillation de la tablette de semi-conducteurs.
Il est à noter en
particulier que l'oscillation dans le circuit ne commence pas jusqu'à ce
qu'elle est initiée par un signal oscillant.
Pour ce faire, il suffit d'appliquer quelques millivolts de CA pendant
quelques secondes à la tablette de semi-conducteurs et les serpentins associés
couplés. Le signal initial appliqué à la
base de la tablette de semi-conducteur et le plomb 39 est de préférence dans la
gamme de fréquence de 5,8 à 18 MHz et peut être aussi élevé que 150 MHz. Ce signal peut être appliqué de toute source conventionnelle et aucun
grand soin n'apparaît nécessaire pour fournir un signal de fréquence unique ou
pour éliminer les bruits. Une fois que
cette excitation a été appliquée au circuit et oscillations initiées, il ne
semble pas être nécessaire d'appliquer un tel signal à nouveau. C'est apparemment en raison de la rétroaction
fournie par la tige de ferrite à la sonde qui entre en contact avec la tablette
de semi-conducteurs.
Est, bien sûr, l'énergie dissipée dans la
lampe, ou autre appareil d'utilisation, comme la combinaison fonctionne. Ces énergies peuvent provenir de la
détérioration de la tablette de semi-conducteur comme oscillations continuent ;
cependant, s'il y a une telle détérioration, il est suffisamment lent qu'une
source d'énergie peut être utilisée pendant de nombreux mois sans
présence. Une telle source
d'énergie peut être augmentée par la radiation ambiante radiofréquence, couplée
dans la cavité résonante par les cordons de liaison externes. Il s'agit d'un phénomène surprenant car les
fils sont petites par rapport à ce qui serait normalement considéré une antenne
adéquate, et il semble donc que l'amplification stimulée peut aussi être une
conséquence de la configuration électronique unique des semi-conducteurs ayant la
composition indiquée ci-dessus.
Bien que seulement un
mode de réalisation de la centrale électrique construite selon les principes de
cette invention a été décrit et illustré ici, beaucoup de modifications et de
variations sera évidente pour un homme du métier dans l'art. Ainsi, par exemple, un plus gros bloc
d'alimentation peuvent être axialement organisé dans un récipient cylindrique
avec différents éléments électroniques disposées dans l'espace annulaire. C'est donc à comprendre que les autres configurations
sont incluses dans la portée de l'invention.
EDWIN GRAY:
CONDENSATEUR DÉCHARGE PULSÉE MOTEUR ÉLECTRIQUE
Brevet américain 3 890 548 17 juin 1975 Inventeur: Edwin V. Gray snr.

CONDENSATEUR DÉCHARGE PULSÉE MOTEUR ÉLECTRIQUE
Veuillez noter qu'il s'agit d'un
re-formulation extrait brevet 3 890 548 de Edwin Gray. Il décrit son moteur de haute tension et les
circuits utilisés pour le conduire. S'il
vous plaît être conscient que la technologie sous-jacente a été développée par
Marvin Cole et Edwin Gray ne comprenait pas il.
En outre, Edwin voulait à tout prix à cacher n'importe quelle
technologie utile lors de l'obtention de brevets afin d'encourager les
investisseurs, alors s'il vous plaît comprendre que ce brevet n'est pas prévu
de vous dire comment faire un système de travail de ce type.
RÉSUMÉ DE L'INVENTION
Cette invention se rapporte aux moteurs,
moteurs électriques et plus particulièrement à une nouvelle machine électrique
y compris les pôles électromagnétiques dans une configuration de stator et
pôles électromagnétiques dans une configuration de rotor, dans lequel dans un
formulaire, le rotor est rotatif dans la configuration de stator et où les deux
sont excités par condensateur les rejets par les électro-aimants du rotor et le
stator à l'instant de l'alignement d'un électro-aimant de rotor avec un
électro-aimant de stator.
L'électro-aimant du rotor est repoussée de l'électro-aimant du stator
par la décharge du condensateur à travers les bobines d'électroaimants le rotor
et le stator au même instant.
Dans un moteur rotatif exemplaire selon
cette invention, les électro-aimants du rotor doit être éliminés à 120 degrés
sur un axe central et électroaimants du stator majeurs peuvent être éliminés à
40 degrés dans le boîtier du moteur sur la périphérie du stator. Autres combinaisons d'éléments du rotor et du
stator peuvent être utilisées pour augmenter le couple ou la vitesse de
rotation.
Sous une autre forme, un électro-aimant
deuxième est positionné sur le côté de chacune des électro-aimants stator
majeur sur un axe 13,5 degrés de l'axe de l'aimant du stator, et ceux-ci sont
excités dans une configuration prédéterminée ou séquence. De même, sur le côté de chaque électro-aimant de
rotor, un électro-aimant deuxième est espacé sur un axe de 13,5 degrés entre
l'électro-aimant de rotor principales.
Les électro-aimants dans les assemblys le rotor et le stator sont
identiques, les électro-aimants individuels de chacun étant alignées axialement
et les bobines de chacun étant câblé afin que chaque pôle de rotor
électromagnétiques aient la même polarité magnétique comme l'électro-aimant
dans le stator avec qui il est aligné et dont il fait face au moment de la
décharge du condensateur.
Charge du condensateur
de décharge ou de condensateurs s'effectue par un circuit électrique de
commutation dans laquelle énergie électrique d'une pile ou une autre source de
potentiel de CC est dérivé par le biais de rectification par diodes.
Le condensateur de
charge circuit comprend une paire de haute fréquence de commutation qui se
nourrissent de bobines allumage respectifs de type automobile employés comme
Intensifier transformateurs. Le " secondaire " de chacune des bobines
d'allumage fournit un signal carré de haute tension à un redresseur pour
générer une impulsion de sortie haute tension d'énergie CC avec chaque
alternance de commutation de la haute fréquence de manœuvre. Qu'une seule polarité est utilisée afin
qu'une impulsion unidirectionnelle est appliquée à la Banque de condensateur en
charge.
Impulsions
unidirectionnelles successifs sont accumulent sur le condensateur ou jusqu'à ce
que la décharge de condensateurs.
Décharge de la batterie de condensateurs se produit à travers un
éclateur par arc-over. L'espacement de fossé détermine la tension à laquelle
décharger ou d'arc se produit. Un
tableau des écarts est créé par des éléments fixes dans le moteur de logement
et de déplacement des éléments positionnés sur l'arbre du rotor. À l'instant quand
les éléments mobiles d'écart sont placés en face des éléments fixes pendant la
rotation du rotor, une décharge se produit à travers les bobines
d'électro-aimants du rotor et le stator alignés pour produire l'action de
répulsion entre les cœurs d'électro-aimant du stator et du rotor.
Une pluralité d'éléments fixes d'écart sont
disposés dans un boîtier du moteur correspondent aux emplacements des
électro-aimants dans le logement du stator.
Les éléments d'écart de rotor correspondent aux positions des électro-aimants
du rotor sur le rotor pour qu'à l'instant de l'alignement correct des lacunes,
les condensateurs sont déchargés pour produire le courant nécessaire dans les
bobines du stator et du rotor provoque des électro-aimants repousser les uns
les autres.
Les circuits de charge sont disposées par
paires et font en sorte que l'évacuation se fait par les enroulements du rotor
et le stator des électro-aimants, qui sont en face de l'autre lorsque les
éléments de l'éclateur sont alignés et arc-over.
La vitesse du rotor
peut être modifiée au moyen d'un mécanisme d'embrayage associé le rotor.
L'embrayage déplace la position des éléments écart rotor afin que la décharge
va dynamiser les bobines de stator de manière à avancer ou retarder le temps de
décharge en ce qui concerne les positions de l'alignement normal du
rotor/stator. Ensuite, la décharge à
travers le rotor et le stator se produit lorsque le rotor a passé le stator par
6,66 degrés d'avance en vitesse.
En provoquant la
décharge se produit lorsque la position du rotor se rapproche du stator, le
pouls de répulsion se produit 6,66 degrés avant la position de l'alignement des
électro-aimants du rotor et du stator, ce qui réduit la vitesse du moteur.
Le mécanisme
d'embrayage pour aligner les lacunes de décharge du condensateur pour décharge
est décrite comme une tête de commande. Il peut être assimilé à un contrôle de
tir mécanisme dans un moteur à combustion interne qu'il " tire " les
électro-aimants et procure un rendement de tout rejet dépassement arrière
potentielle sur la batterie ou autre source d'énergie.
L'action de la tête de
commande est extrêmement rapide. D'après
la description qui précède, on peut s'attendre qu'une augmentation de vitesse
ou une diminution de la vitesse de rotation peut se produire dans le délai dans
lequel l'électro-aimant du rotor se déplace entre n'importe quelle paire
d'électro-aimants adjacentes dans l'assemblage du stator. Ce sont des 40 degrés alors les changements de vitesse peuvent être
effectués dans un délai maximum d'un neuvième d'une révolution.
L'action de changement de vitesse du rotor
du contrôle tête et sa structure sont censées être plus loin de nouvelles
caractéristiques de l'invention, qu'ils maintiennent le degré normal de 120
positions au cours de la vitesse uniforme des conditions de rotation de tir,
mais Maj à 6,66 degré plus longue ou des intervalles plus courts pour la
vitesse changent par le mécanisme de nouvelles Maj dans le rotor de
l'embrayage.
Par conséquent, le mode
de réalisation préféré de l'invention est un moteur rotatif électrique, dans
lequel le couple du moteur est développé par décharge ayant un potentiel élevé
d'une batterie de condensateurs, par le biais de bobines stator et rotor
d'électro-aimant lorsque les électro-aimants sont alignées. Les condensateurs sont chargés de piles par
un mécanisme de commutation et sont libérées à travers des éclateurs pour
obtenir la décharge de la tension de charge du condensateur à travers les
bobines de l'électro-aimant, lorsque les lacunes et les rotor prédéterminé et
les paires de stator électro-aimant sont alignées.
Modes de réalisation
exemplaires de l'invention sont présentes illustrées et décrites. Ces illustrations exemplaires et la
description ne doivent pas être interprétés comme limitant l'invention aux
configurations montré, parce que ceux spécialisés dans les arts relevant de
l'invention peuvent concevoir d'autres modes de réalisation à la lumière de la
description.
BRÈVE DESCRIPTION DES DESSINS
Fig.1 est un schéma
explicatif d'un condensateur de charge et de décharge de circuit utilisés dans
la présente invention.
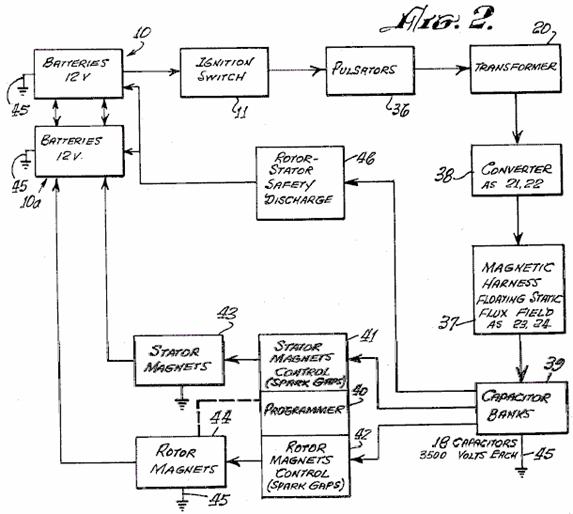
Fig.2 est un schéma
fonctionnel d'un système de moteur exemplaire selon l'invention.
Fig.3 est une vue en perspective d'un système de moteur typique selon
l'invention, couplé à une transmission automobile.

Fig.4 est une vue en
coupe axiale prise à la ligne 4---4 po Fig.3
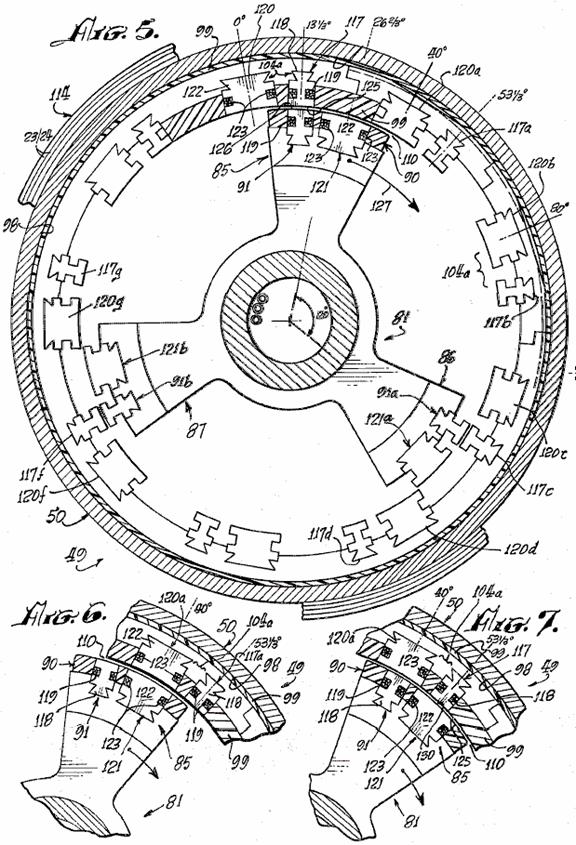
Fig.5 est une vue en
coupe prise à la ligne 5---5 dans Fig.4
Fig.6 et Fig.7 vues en coupe fragmentaires, correspondant à une partie
de la Fig.5, illustrant successives progressent des positions du rotor
moteur.

Fig.8 est une vue en
perspective éclatée du rotor et le stator du moteur de la Fig.3 et Fig.4.
Fig.9 est une vue en
coupe prise à la ligne 9---9 de Fig.4
Fig.10 est une vue en
coupe partielle, semblable à la vue de la Fig.9, qui illustre une
configuration différente des électro-aimants dans une autre réalisation de
moteur de l'invention.
Fig.11 est une vue en coupe prise à la ligne 11---11 dans Fig.3,
illustrant la tête de commande ou le changement de vitesse roman contrôlant le
système du moteur.
Fig.12 est une vue en
coupe, prise ligne 12---12 dans la Fig.11, montrant qu'une plaque
embrayage utilisé dans le système de contrôle de changement de vitesse de Fig.11.
Fig.13 est une vue
fragmentaire, prise à la ligne 13---13 sur la Fig.12
Fig.14 montre une vue
en coupe, prise à la ligne 14---14 dans la Fig.11, montrant une
plaque embrayage qui travaille en collaboration avec la plaque de l'embrayage
de la Fig.12.
Fig.15 est une vue en
coupe fragmentaire prise à la ligne 15---15 du Fig.13
Fig.16 est une vue en
perspective d'électro-aimants utilisés dans la présente invention.
Fig.17 est un
diagramme schématique montrant des caractéristiques mécaniques et électriques
ayant coopéré de la part du programmeur de l'invention.
Fig.18 est un schéma électrique d'un moteur selon l'invention, montrant les
relations électriques des composants électromagnétiques qui incarnent un
nouveau principe de l'invention, et

Fig.19 est une vue développée, prise à la ligne 19---19 de Fig.11,
montrant l'emplacement des éléments déplacés éclateur de la vitesse de
changement de mécanisme d'un moteur selon l'invention.
DESCRIPTION DE
LA RÉALISATION PRÉFÉRÉE
Comme mentionné
précédemment, le principe de fonctionnement du moteur de l'invention, est la
décharge d'un condensateur à travers un éclateur et grâce à un inducteur. Lorsqu'une paire des inducteurs est utilisée,
et les noyaux magnétiques respectives ceux-ci sont disposés en face de l'autre
et disposées en opposition de polarité magnétique, la décharge à travers eux
provoque les carottes repousser les uns les autres avec beaucoup de puissance.
Évoquant le schéma électrique de la Fig.1,
une batterie 10 s'excite un impulsion produisant vibrateur mécanisme 16,
qui peut être du type magnétique, incorporant une armature 15 se
déplaçant entre les contacts 13 et 14, ou du type transistor (non
illustré) avec lequel une sortie pulsé bipolaire haute fréquence est produite à
17 primaire du transformateur 20.
L'amplitude de l'impulsion est intensifié dans 19 secondaire du
transformateur 20. Forme d'onde 19
a représente la sortie pulsée bidirectionnel ou bipolaire. Un redresseur à diode 21 produit un
train d'impulsions unidirectionnelles, comme il est indiqué au 21 a,
pour charger le condensateur 26.
Successifs impulsions unidirectionnelles de vague 21 a charge
condensateur 26 à haut niveau, comme il est indiqué à 26 a,
jusqu'à ce que la tension au point A se lève suffisamment élevées pour
provoquer une étincelle dans l'ensemble de l'éclateur 30. Condensateur 26 rejets par
l'intermédiaire de l'éclateur, par l'intermédiaire de la bobine de
l'électro-aimant 28. Une impulsion de courant est produite qui
magnétise core 28a.
Simultanément, un autre sensiblement identique tè 32 produit une
décharge à travers l'inducteur 27 travers éclateur 29, à
magnétiser core 27a. Carottes 27 a
et 28 a sont enroulés avec bobines 27 et 28 respectivement, afin
que leurs polarités magnétiques sont les mêmes.
Comme les carottes 27a et 28 a s'affrontent, ils ont tendance à
voler en éclats lorsque la décharge se produit à travers des bobines, 27 et
28 à cause de la répulsion des identiques des pôles magnétiques, comme
indiqué par la flèche 31. Si core 28 bis est fixe ou
stationnaire, et core 27a est mobile, core 27 a peut-être outils 33
attaché à elle pour effectuer les travaux lorsque le condensateur
s'acquitte.
Se référant à la Fig.1 et Fig.2,
une source d'alimentation électrique CC ou de la batterie 10, s'excite
pulsateurs 36 (dont au moins deux vibrateurs 16 comme décrits
précédemment) lorsque le commutateur 11 entre la batterie 10 et
pulsateur 36 est fermé, à appliquer relativement des impulsions de haute
fréquence pour les primaires de transformateurs 20. Les secondaires des transformateurs 20 sont
des enroulement croissantes de tension qui s'appliquent à des impulsions
bipolaires, tels que les impulsions 19a (Fig.1) pour les diodes
dans le convertisseur de 38. La sortie de
palpitation unidirectionnelle rectifiée de chacune des diodes dans le
convertisseur de 38 est passée dans les serpentins de retard 23 et 24,
formant ainsi un harnais 37, enroulé sur le cas du moteur, comme dans la
présente après décrit, qui est censé fournir un champ statique de flux
flottant. Les sorties de lignes à retard
37, conduire des condensateurs respectifs dans 39, les banques de
facturer les condensateurs qui y sont, à un potentiel de charge relativement
élevée. Un programmeur et du rotor et le
stator aimant tableau de contrôles 40, 41, 42, est formé par les
éclateurs placés, tel que décrit ci-après, afin qu'à prédéterminés positions du
rotor pendant la rotation du moteur, comme décrits ci-après, sélectionnés des
condensateurs du condensateur banques 39 débarqueront à travers les
éclateurs à travers les rotor et le stator électro-aimants 43 et 44. Les convertisseurs 38, programmeur 40
et 41 et 42, les contrôles forment un chemin d'accès de série circuit dans
les tumeurs secondaires des transformateurs 20 au sol, ou point de
potentiel de référence, 45. Les
banques de condensateur 39 sont déchargées à travers les lacunes
d'étincelle de programmeur 40 (le rotor et le stator aimant gère 41
et 42). La décharge se produit à
travers les bobines d'électroaimants du stator et du rotor, 43 et 44 au
sol 45. Électroaimants du stator et du rotor sont similaires à ceux
indiqués au 27, 27a, 28 et 28a à la Fig.1.
La décharge à travers
les bobines d'électroaimants du stator et du rotor, 43 et 44 s'accompagne
d'un dépassement de la décharge ou l'impulsion de retour, qui est appliquée à
une batterie secondaire 10 a pour stocker ce surplus d'énergie. Le pouls de l'overshoot retourne à batterie 10
a, car, après la sortie, la seule voie ouverte pour elle est qu'à la
batterie 10 a, depuis les lacunes en 40, 41 et 42 ont cessé de
fonctionner, car les condensateurs de banques 39 sont déchargées et
n'ont pas encore retrouvé la charge haute tension depuis les générateurs
d'impulsions haute fréquence 36 et le 38 d'unités redresseur
convertisseur.
En cas de raté dans les
circuits de commande de programmeur 40, 41 et 42, les condensateurs sont
évacués par un circuit de décharge de sécurité rotor 46 et retournés à
batteries 10-10a, ajoutant à leur capacité. Le circuit 46 est raccordé entre les condensateurs 39 et
batteries 10, 10a.
Se référant à la Fig.3,
un moteur ou un moteur 49 selon la présente invention est montré
connecté avec une transmission automobile 48. La transmission 48, représente une des
nombreuses formes de charges à laquelle le moteur peut être appliqué. Un moteur boîtier 50, recouvre le
mécanisme de fonctionnement décrit ci-après.
Le programmeur 40 est monté axialement à une extrémité du
boîtier. Par ouvertures, 51 et 52,
un couples 53 de ceinture à une poulie 57 (non illustré dans ce
point de vue) et d'un alternateur 54 attaché au boîtier 50. Une poulie 55 sur l'alternateur, a
deux rainures, un pour la ceinture de 53 à 58 sur l'arbre (non illustré)
la poulie d'entraînement du moteur 49, et l'autre pour une ceinture 58
couplé à une poulie 59 sur une pompe 60 attaché au boîtier 50,
un terminal case 61 sur le boîtier, interconnexions entre l'ensemble 62
de la batterie et le moteur 49 via câbles 63 et 64.
Un apport 65 pour
l'air, est couplé à la pompe 60 via la tuyauterie 68 et 69 et de
la pompe 60 via la tuyauterie ou tubage 66 et 70 à l'intérieur du
boîtier 50 via couplage brides 67 et 71. Le débit d'air tend à refroidir le moteur et
l'air préférence peut être maintenu à une température constante et l'humidité
afin qu'un état de décharge constante éclateur est maintenu. Un mécanisme d'embrayage 80 est fourni sur le programmeur 40.
Se référant à la Fig.4, Fig.5
et Fig.9, rotor 81 a assemblées araignée 83 et 84 avec
trois électro-aimant bobine assemblée ensembles montés à ce sujet, dont deux
sont indiqués à la Fig.4, sur 85, à 85a, 85b et sur
86, 86a et 86b. L'Assemblée
bobine électro-aimant, désignée 87a, est illustré à la Fig.5, en
vue de l'extrémité de l'arbre. Comme le
montre plus clairement dans la vue en perspective de la Fig.8, une
troisième Assemblée araignée 88 fournit la rigidité supplémentaire et un
support central pour le mécanisme du rotor sur l'arbre 81.
L'électro-aimant fixe 85a, 85b, 86b, 87a et
86a, 87b, recouvre le rotor 81 et araignées, 83, 84 et 88,
chaque compromis d'avant unités 85a, 86a et 87a et paires d'arrière
unités 85b, 86b et 87b. Chaque
paire se compose d'un électro-aimant majeure et une mineure électro-aimant,
décrit ci-après, qui sont intégrés dans un matériau isolant 90, qui
isole l'électro-aimant bobine assemblées entre eux et sécurise les
électro-aimants rigidement en place sur la cage de l'araignée/rotor 81, 83,
84 et 88.
Le mur de l'intérieur 98, du boîtier 50,
est revêtue d'un matériau électriquement isolant 99 qui sont des bobines
de l'électro-aimant ancrées, décrits ci-après, et l'intérieur des plaques
d'extrémité 100 et 101 du boîtier 50. Sur l'isolant de la surface 98 du
logement 50 est monté une série d'électro-aimant de stator paires 104
a, identique avec un électro-aimant paires 85a 86a, 87a, etc. Électro-aimant paires telles que 104 ou
105a sont éliminés chaque 40 degrés à l'intérieur du logement 50 pour
former un stator qui travaille en collaboration avec le rotor 81-88. Un espace d'air 110 de tolérance très
étroite est défini entre les électro-aimants du rotor et le stator et l'air de 65
traverse de pompe à l'occasion de cette lacune.
Comme indiqué dans la Fig.8, les
assemblées de l'électro-aimant, tels que 85 à 87, des assemblys du rotor
et aimant, comme 104a du stator, sont alors incorporées dans leurs
respectifs isolants supports en plastique (rotor et stator) qu'ils sont sans
à-coup arrondis dans un contour concave sur le rotor pour permettre lisse et
continue de rotation du rotor 81 stator boîtier 50. L'entrefer 110 est uniforme à tous les
postes de n'importe quel élément du rotor au sein de l'Assemblée de stator,
comme clairement indiqué dans la Fig.16.
Le rotor 81 et araignées, 83, 84
et 88 sont rigidement montées sur arbre 111 journalisé en portant
des assemblys 112 et 113, qui sont de type conventionnel, pour une
simple rotation de l'arbre de rotor 111 dans boîtier 50.
Autour de la surface extérieure centrale du
boîtier 50, sont enroulés un nombre de tours de bobine fil 23 et 24 pour
fournir une statique de flux 114 qui est une ligne à retard, comme
décrite précédemment. Fig. 5, 6, 7 et
9 sont vues en Coupe du rotor Assemblée 81-88, arrangé pour montrer
le positionnement et l'alignement des assemblées bobine électro-aimant du rotor
et le stator à des étapes successives de la rotation du rotor 81-88 grâce
à une partie d'un cycle de fonctionnement de celle-ci. Par exemple, dans Fig.5 le rotor
Assemblée 81-88 est montré alors positionné qu'un rotor d'électro-aimant
mineur 91 est alignée avec une Assemblée d'électro-aimant mineur stator 117.
Tel que plus amplement
détaillé Fig.16, électro-aimant mineur 117 se compose d'un noyau
de fer 118, rainuré afin que la bobine de fil 119 peut être
enroulée autour d'elle. Core 118, c'est la même dans
l'électro-aimant stator 117 comme il est dans l'électro-aimant rotor 91.
Comme une position
13,33 degrés vers la droite d'électro-aimant de rotor 91, tel qu'affiché
dans la Fig.5 et Fig.16, il y a un électro-aimant de seconde ou à
grande échelle du rotor 121 qui a un enroulement 123 sur son
noyau dur 122. Les électro-aimants 91 et 121 sont le
couple 85a dans Fig.4 et Fig. 8.
À une position 13,33
degrés vers la gauche d'électro-aimant de stator 117, tel que vu à la Fig.5,
il y a un électro-aimant de seconde ou à grande échelle du stator 120, 122
dont le cœur est de la même configuration que core 122 d'électro-aimant
de rotor 121. Un enroulement 123
sur le core 122 d'électro-aimant 120 est le même caractère
que 123 sinueuse sur électro-aimant 121.
Paire de montage
électro-aimant 85a sur le rotor est identique en configuration à celle
de la paire d'Assemblée en stator électro-aimant 104a, à l'exception de
l'inversion de la position des éléments 117-120 et 91-121 des couples
respectifs.
Il n'y a aucun paires
d'électro-aimants 120-117 (104a) situés à des intervalles de 40
degrés à l'intérieur du boîtier 50.
La ligne médiane du noyau 122 d'électro-aimant 120 est
positionnée 13,33 degrés vers la gauche de l'axe du noyau d'électro-aimant 117,
118. Trois paires d'électro-aimants 85a, 86a et 87a sont fournies sur
l'ensemble du rotor 81-88 comme illustré à la Fig.5.
D'autres combinaisons sont possibles, mais
le nombre des électro-aimants dans le rotor doit toujours être en fraction
intégrante du nombre des électroaimants du stator. Comme indiqué dans la Fig.8, pour
l'ensemble rotor 85a et 85b, il y a trois de chacune des paires devant
et le dos des assemblys électromagnétiques.
De même, comme sur la Fig.4 et Fig.8, il y a neuf paires de
devant et le dos des électroaimants du stator comme 104 et 104b.
Afin de mieux
comprendre le fonctionnement du rotor 81-88 rotation dans le stator
boîtier 50 d'un moteur selon la présente invention, les positions des
électro-aimants rotor 91 et les électroaimants du stator 117 sont
d'abord exactement dans la ligne à la position de départ périphérique 13,33
degré marquée sur l'axe vertical de la Fig.5. Le sens d'enroulement des
bobines de ces aimants est telle qu'un courant de CC dans les serpentins de 119
produira une polarité particulière aimant identique sur chacune des
surfaces juxtaposés 125 d'aimant 117 et 126 d'aimant 91
(Fig.5). Fig.16 et Fig 6 illustrent la prochaine étape dans la motion
dans laquelle les deux électroaimants majeurs, 120 dans le stator et 121
dans le rotor, soient dans l'alignement.
Quand les rejets de la CC des condensateurs
appropriées de banques 39 se produisent simultanément à travers les
éclateurs à travers les serpentins 119 d'électro-aimants 117 et 91,
à l'instant de leur alignement, leurs cœurs 118, repoussera mutuellement
à causer ensemble rotor 81-88 faire pivoter vers la droite dans le sens
indiqué par la flèche 127. Le
système ne bouge pas dans le sens inverse, car il a été lancé dans le sens
horaire par le moteur alternateur 54 illustré à la Fig.3, ou par
tout autre moyen de démarreur. Si a commencé
vers la gauche, le moteur continuera à tourner dans le sens antihoraire.
Tel que mentionné
précédemment, la décharge d'un condensateur se produit sur un intervalle très
court par l'intermédiaire de son associé éclateur et l'action qui en résulte de
la répulsion magnétique imprimant le mouvement du rotor. L'événement de la décharge se produit lorsque
les électro-aimants 117 et 91 sont dans l'alignement. Tel qu'illustré à la Fig.5,
électro-aimant rotor 91 a est aligné avec l'électro-aimant stator 117c
et électro-aimant rotor 91b est aligné avec l'électro-aimant stator 117e
au moment même où semblables électro-aimants 117 et 91 sont
alignés. Une décharge se produit à
travers les six de ces électro-aimants en même temps (c'est-à-dire, 117, 91,
117c, 91a, 117e et 91b). Un
condensateur et un éclateur sont requis pour chaque bobine de chaque
électro-aimant. Où, comme dans
l'ensemble illustré dans la Fig.8, paires avant et arrière sont
utilisés, l'axial en ligne avant et arrière de bobines sont excités
simultanément par la décharge d'un condensateur unique ou d'une batterie de
condensateurs parallèles comme 25 et 26 (Fig.1). Bien que Fig.4 et Fig.8 indiquent
l'utilisation d'électro-aimants devant et le dos, il devrait être évident que
seulement un seul électro-aimant dans n'importe quelle position du stator et un
électro-aimant unique correspondant à la position du rotor, peuvent être
utilisées pour accomplir l'action de la répulsion du rotor en ce qui concerne
le stator. Comme indiqué, chaque
électro-aimant nécessite une décharge d'un condensateur unique ou une batterie
de condensateurs à travers un éclateur pour qu'il puisse être excité, et la
polarité magnétique des visages juxtaposés noyau magnétique doit être le même,
pour effectuer l'action répulsive pour produire le mouvement rotatoire.
Se référant à la Fig.5
et Fig.6, l'action de répulsion entraîne le rotor déplacer 13,33 degrés
vers la droite, tandis que les électro-aimants 91, 91a et 91b s'éloigner
les électro-aimants 117, 117c et 117e d'apporter électro-aimants 121,
121a et 121b alignement respectifs avec les électro-aimants 120a, 120d
et 120f. À cette époque, une
décharge de condensateur à travers un éclateur dans leurs bobines 123 se
produit, passant ainsi le rotor. Un
autre 13,33 degrés avant, comme illustré à la Fig.7, major
électro-aimants 121, 121a et 121b entrent en alignement avec les
électro-aimants mineurs 117a, 117d et 117f, date à laquelle une décharge
se produit pour répéter la répulsion, cette action continue aussi longtemps que
le pouvoir de CC est appliquée au système pour charger les banques de
condensateur.
Fig.18 plus illustre le séquençage des rejets du condensateur sur paires
terminal approprié éclateur. Des bobines
de stator seul neuf et trois bobines monorotors sont affichés avec leurs liens
respectifs avec les éclateurs et auxquels ils sont associés pour la décharge de
condensateurs. Lorsque les bornes de
l'éclateur appropriées sont alignés, aux points dans le positionnement de l'ensemble
rotor une action plus efficace de répulsion des noyaux de l'électro-aimant
juxtaposés, la décharge des condensateurs chargés appropriés dans l'ensemble de
l'éclateur associé se produit à travers les serpentins respectifs. Les condensateurs sont déchargés est un ensemble de
trois, par l'intermédiaire de séries de trois bobines à chaque position de
décharge, comme le rotor se déplace entre les positions de rotor. Dans la Fig.18, les électro-aimants de
rotor sont positionnés linéairement, plutôt que sur une base circulaire, pour
montrer l'action électrique d'un moteur électrique selon l'invention. Ces électro-aimants moteurs 201, 202 et 203 sont alignent les
électroaimants du stator 213, 214 et 215 à 0 degrés, 120 degrés et 240
degrés respectivement. Les
électroaimants du stator corrélativement apparaissent dans un schéma linéaire
comme si sortit de l'assemblage du stator et mis côte à côte. Pour plus de clarté de la description, les
condensateurs associés au fonctionnement du rotor, 207, 208, 209 et 246,
247, 248, 249, 282 et 283, sont disposés en alignement vertical avec les
positions respectives des spires du rotor, 201, 202 et 203 qui se
déplacent de gauche à droite, ce correspondant à une rotation vers la droite du
rotor. Des bobines du stator, 213,
214, 215, 260, 261, 262, 263, 264, 265, 266, etc. et combinaisons de
condensateur sont disposés côte à côte, encore une fois, pour faciliter la
description.
Un disque isolant 236
(illustré à la Fig.17 en forme de disque mais déplié linéairement dans Fig.18)
a monté à ce sujet, trois blocs de jonction 222, 225 et 228 de
l'écart. Chaque bloc est réctangulaire
en forme de U, et chacun Interconnecte deux bornes avec la base de l'u. Bloc 222 a bornes 222a et 222b. Bloc 225 a bornes 225 et 225b. Bloc 228 a bornes 228c et 228d. Lorsque isolante disque 230 fait
partie du rotor comme indiqué par liaison mécanique 290, on voit que
terminal U 222 crée une paire de lacunes avec bornes de fossé 223 et
224 respectivement. Ainsi, lorsque
la tension sur le condensateur 216 de charge unité 219, est d'une
valeur qui permettra à l'arc sur les espaces d'air entre 222 et 223 et
entre 222b et 224, le condensateur 216 se déchargent dans la
bobine d'électro-aimant 213 à terre.
De même, l'écart terminal Qu'u 225 constitue un double éclateur
avec bornes écart 226 et 227 causera étincelles lorsque la tension sur
le condensateur 217, pratiquée par charge circuit 220, déverse
dans la bobine d'électro-aimant 214.
En outre, U-gap terminal 228 avec bornes 228c et 228d,
crée un éclateur avec condensateur bornes 229 et 230 à décharge 218,
pratiqué par charge circuit 221 en bobine 215. En même temps, les bobines du rotor, 201,
202 et 203 à travers les lacunes 201 - 204, 202b - 205c et 203 -
206 chaque reçoit une décharge de condensateurs respectifs, 207, 208 et
209.
Quand l'électroaimant,
bobines, 213, 214 et 215 et 201, 202 et 203 sont excités, les causes
d'action répulsion l'ensemble rotor pour déplacer vers la position 2, où
un nouveau groupe simultané des rejets se produit dans le rotor bobines 201,
202 et 203 de condensateurs, 246, 248 et 282 à travers les lacunes 201a
- 240, 202b - 242 et 203c - 244. En
même temps, parce que gap-U-éléments 222, 225 et 228 ont également
déplacé sur la position 2 avec le rotor, condensateur 261 est
déchargé à travers de la bobine de l'électro-aimant 260, condensateur 265
est déchargé à travers de la bobine de l'électro-aimant 264 et
condensateur 269 est déchargé par électro-aimant bobine 268 aligné
sur la position 2 des bobines du rotor électro-aimant, donc de provoquer
les électro-aimants de rotor passer à la position 3, où le modèle de
décharge se répète maintenant avec condensateurs 247, 249 et 283 décharger
dans les serpentins d'électro-aimant de rotor, 201, 202 et 203 et les
condensateurs, 263, 267 et 281 s'acquitter respectivement par
l'intermédiaire de bobines de stator électro-aimant 262, 266 et 280.
Après chaque
déchargement, les circuits de charge 219-221 et 272-277 pour les
condensateurs de stator et 210-212, 284-289 pour les condensateurs de
rotor, fonctionnent en continu provenant d'une source de la batterie comme
décrit précédemment, se référant à la Fig.1, pour recharger constamment
les condensateurs à laquelle chacun est connecté. Ceux versés dans l'art, vont apprécierez que,
comme les rejets de chaque condensateur à travers un éclateur associée, la
baisse du potentiel à travers l'écart qui en résulte rend l'écart un circuit
ouvert jusqu'à ce que le condensateur peut recharger au niveau de l'arc sur
l'écart. Cette recharge se produit avant
qu'un élément de rotor arrive à la position suivante dans la rotation.
Le schéma mécanique de
la Fig.17, précise le fonctionnement de la décharge de l'éclateur de
programmation système. Un disque avant 236
d'une matière isolante électriquement, a à ce sujet l'ensemble des connecteurs
à gap en U décrit précédemment. Ceux-ci sont situent respectivement à 0
degrés, 120 degrés et 240 degrés. Fig.17,
représentation schématique de la position des bobine et condensateur des
arrangements au début d'un cycle est indiquées correspondent à la description
ci-dessus en ce qui concerne la Fig.18.
Par conséquent, les
combinaisons bobine et condensateur 213/216, 214/217 et 215/218 apparaissent
connectés avec leurs terminaux d'écart, respectivement, 223/224, 226/227 et
229/230. Sur la connexion de
bobine et condensateur de rotor, trois disques distincts, 291, 292 et 293 sont
apposées, chacun avec un seul écart terminal.
Les disques 291-293 pivotent afin de positionner leurs terminaux
respectifs écart 201a, 201b et 201c, à 120 degrés, avec les degrés 0
position correspondant à la position 0 degrés de U-intervalle terminal 222 sur
disque 230.
Écart représentatif
terminaux est affichées sur les périphéries de disques 230, 291-293 pour
indiquer clairement comment, car les disques se transformer à l'unisson, les
alignements de fossé correspondent afin que les trois bobines du rotor toujours
alignent trois bobines de stator à intervalles de 120 degrés sur le chemin
rotatif, produisant un alignement tous les 40 degrés, il en bobines de stator
neuf. Ainsi, il y a trois rejets
simultanées dans les bobines de stator et trois dans les bobines du rotor à
chaque position de 40 degrés. Neuf
postes déplacés à 40 degrés fournissent un total de 27 points de rejet pour les
condensateurs dans les bobines du rotor et la décharge de 27 points pour les
condensateurs dans les bobines du stator en une rotation du rotor.
On comprendra que, tel
qu'illustré dans la Fig.17 et Fig.18, neuf électro-aimant individuelles
figurent les bobines du stator et trois dans le rotor, afin de montrer dans sa
forme la plus simple, comment les électro-aimants de trois rotor sont avança
d'alignement avec trois des électroaimants du stator, lorsque les éclateurs
appropriées soient dans l'alignement, à l'effet de la décharge des condensateurs
par paires juxtaposés d'électro-aimants de rotor/stator. La répulsion déplace l'électro-aimant du
rotor de l'électro-aimant de stator à la prochaine position d'alignement 40
degrés supplémentaires sur. Dans
l'intervalle, jusqu'à ce qu'un autre électro-aimant de rotor, 120 degrés
enlevés, est aligné avec l'électro-aimant de stator qui avait juste été pulsé,
le condensateur associé est rechargé.
Ainsi, le rotor se déplace d'une position à l'autre, avec condensateur
rejets survenant chaque 40 degrés de rotation, un total de neuf par
révolution. Il devrait être évident que,
avec d'autres combinaisons de rotor/stator, le nombre de coïncidences de
l'électro-aimant et rejets de l'éclateur variera. Par exemple, avec les paires de bobine
montrés Fig.4 à Fig.8, un total de 27 décharges se produit. Il existe 18 électroaimants du stator et 3
électro-aimants de rotor, le modèle de décharge est déterminé par l'arrangement
spécifique éclateur.
La configuration de
rotor/stator de la Fig.5 et Fig.8, impliquant les paires majeures et
mineures d'électro-aimants, tels que 85 a et 104 (les termes
" mineurs " et " major ", se référant à la différence de
taille entre les éléments), comprennent neuf paires d'électroaimants du stator,
tels que 104a, avec trois paires d'électro-aimant du rotor, tels que 85a. En raison de la séparation de 13,33 degré
entre les électro-aimants majeures et mineures dans la paire de rotor 85 a,
avec la même séparation des électro-aimants mineures et majeures de la paire de
stator 104a, la séquence de rotation et décharge décrit ci-dessus, en ce
qui concerne l'exemple de la Fig.5, implique ce qui suit :
1. un élément mineur 117 de paire de stator 104a est aligné
avec l'élément mineur 91 de paire de rotor 85a. Sur la décharge, cela progresse le rotor
13,33 degrés.
2. l'élément majeur de rotor 122 de la paire de 85a, est
maintenant aligné avec l'élément majeur de stator 120b de la prochaine
paire de stator électro-aimant, dans le tableau de stator comme indiqué en Fig.6. Sur la décharge, le rotor va de l'avant 13,33
degrés.
3. cela amène l'électro-aimant de rotor mineur 91 dans l'alignement
de l'électro-aimant de stator majeur 120b de paire 104d et
l'électro-aimant majeur 122 (juste déchargé) de paire 85a dans
l'alignement de l'électro-aimant mineur 117b de paire 104d et les
éléments d'éclateur de rotor en alignement avec une position différente des
éléments de l'espace connecté avec condensateurs ne pas déchargés dans la
position précédente du rotor. Nous
rappelons à ce stade que c'est le positionnement d'un tableau de l'éclateur
rotatif, semblable à celui illustré à la Fig.17 et Fig.18, qui contrôle
le temps de décharge des condensateurs connectés à ces bornes de gap. Par conséquent, n'importe quel électro-aimant
peut être excité deux fois, successivement, de condensateurs séparés car le
rotor apporte des bornes écart approprié en alignement avec les bornes de la
bobine d'un électro-aimant particulière.
Ainsi, bien que majeur
électro-aimant 120b de paire 104d a juste été excité comme décrit
ci-dessus, il peut maintenant être excité à nouveau avec l'électro-aimant de
rotor mineur 91 à l'étape 3, parce que le rotor déplacé à un nouvel
ensemble de bornes de l'éclateur tableaux liée aux condensateurs qui n'ont pas
encore été libérés. Ces condensateurs se
déchargent maintenant par électro-aimant rotor 91 et l'électro-aimant de
stator 120b, entraînant le rotor pour faire avancer un autre degrés
13,33, donc encore aligner deux électro-aimants mineurs encore une fois, soit 117b
de paire de stator 104d et 91 du couple rotor 85a. Le rotor a déménagé de 40 degrés depuis
l'étape 1 ci-dessus. La séquence se
répète maintenant indéfiniment. Il est à
noter que, à chaque étape de 13,33 degré, les décharges conduire le rotor un
autre 13,33 degrés. Il y a 27 pas par tour avec neuf paires de bobines du
stator. La séquence de la décharge n'est
pas uniforme, comme le montre le Tableau 1. Dans le stator, trois électro-aimants majeurs 120 degrés sont alimentés
deux fois dans l'ordre, suivie d'une interruption d'une étape tout en trois
électro-aimants mineures du stator, 120 degrés dehors, sont mis sous tension
durant la pause. Dans le rotor
électro-aimants majeurs sont excités pendant une étape de hiatus suivant deux
étapes de leur excitation électro-aimant mineures. Un total de 27 energisations sont cela
accompli dans les neuf paires de bobines du stator.
Dans le Tableau 1, la colonne de
gauche montre l'emplacement de chaque bras du rotor, 85, 86 et 87 à une
étape choisie arbitrairement position de n ° 1.
Par exemple, à l'étape 1, bras rotor 85a un stator mineur et
électro-aimant rotor mineur dans l'alignement pour les condensateurs de se
décharger à travers eux simultanément à la position de 13,33 degré.
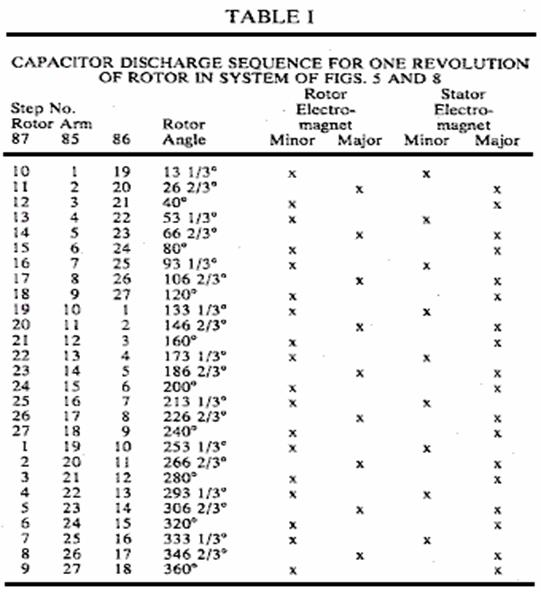
De même, à l'étape 1, bras rotor 86 est
à la position de 133,33 degré qui a deux électro-aimants mineurs dans
l'alignement, prêt pour la décharge. Simultanément,
bras rotor 87 est à la position de 253,33 degré avec deux
électro-aimants de mineurs alignées pour décharge de condensateur. Les autres étapes de la séquence sont
apparentes du Tableau 1, pour chaque position des bras trois rotor à
n'importe quelle étape et les juxtapositions de stator respectif et éléments
électro-aimant rotor à cette position.
Dans l'arrangement
moteur simplifié montré sous forme schématique dans la Fig.18, avec la
configuration de l'électro-aimant unique, l'alignement est uniforme et les
séquences de décharge suivent séquentiellement.
Comme mentionné
précédemment, un changement de vitesse est effectué en déplaçant les bornes
éclateur stator le rotor (montré à 236 en Fig.17 et Fig.18)
degrés 6,66 soit vers la gauche ou vers la droite afin que la décharge
positiondu les électroaimants du stator est déplacé. Se référant aux Figs 11 à 15, la
décharge simultanée de condensateurs sélectionnés dans les résultats des
électro-aimants déplacés une décélération si l'électro-aimant de rotor
s'approche de l'électro-aimant du stator au moment de la décharge ou à une
accélération si l'électro-aimant de rotor quitte l'électro-aimant de stator au moment
de l'impulsion de décharge. Dans chaque
épreuve, il y a une réaction répulsive entre les électroaimants du stator et du
rotor dont les effets de ce changement de vitesse.
Se référant à la Fig.11,
mécanisme d'embrayage 304 sur arbre 111 est exploité aux ondes
électromagnétiques de façon habituelle, pour remplacer le mécanisme de
l'éclateur 236 qui fonctionne normalement dans un alignement approprié
correspondant avec les disques d'éclateur de rotor 291, 292 et 293. Embrayage 304 a un élément fixe de la
route 311, contenant une bobine à commande électromagnétique (non
illustré) et un élément moteur 310 qui, lorsque la bobine de commande
électromagnétique est excitée, peut être actionné par un courant continu. L'opération d'élément moteur 310, rassemble en service, éclateur
éléments 224r, 223r ou 223f, 224f du système indiqué sur les Fig.4,
Fig.5 et Fig.8, comme illustré dans la Fig.19.
Le fixe stator bobine éclateur terminal
paires 223, 224 et 266, 267 sont disposées sur une armature cylindrique 322,
qui est fabriquée en matériau isolant.
Dans l'exemple des Fig.17 et Fig.18, il y a neuf telles paires
terminal éclateur positionnés sur la périphérie du cadre cylindre 324. Dans le moteur de la Fig.4 à Fig.8, un total
de 27 telles paires éclateur sont impliqués.
En outre, bien que non montré dans le dessin, il y a aussi paires de
bornes, tels que 223r ou 223f, 224r ou 224f et 226r ou 226f,
267r ou 267f, déplacées 6,66 degrés de chaque côté des 223, 224 ou
266, 267 et toutes les autres paires dans le tableau de l'éclateur, les
lettres " r " et " f " qui dénote le " retard "
ou " plus vite ". Les paires
de déplacés ces derniers sont utilisés dans le contrôle de la vitesse du rotor
moteur. Les paires déplacées ne pas
montrés sont impliqués dans le fonctionnement de l'embrayage, 304,
l'élément de contrôle de changement de vitesse.
Embrayage 304 est
associé à arbre 111, en ce que l'élément mobile 310 attire
l'élément disque embrayage 316 sur arbre 111, loin d'élément de
disque embrayage 322 lorsque alimenté par une tension de polarité
appropriée appliquée à son moteur électro-aimant 311. Ces disques d'embrayage sont bien connus dans
l'art.
Le mécanisme
d'embrayage 304 dans Fig.11 et Fig.19, lorsque non excité, est
dans la configuration illustrée dans la Fig.11. La configuration sous tension de l'embrayage 304
n'est pas spécifiquement illustrée. Lors de leur excitation, élément
d'éclateur 222 sur disque 236 est déplacé vers la droite, comme
vu dans Fig.11, par des lignes brisées 236X, en alignement avec la
position des bornes de l'éclateur fixe 223f, 224f et 267r, 266r. Lorsque le disque est en position 236X,
le bord aplati 332 de broche 330 dans le disque 325 surfe
sur surface 350 du disque 322.
Normalement, les bords aplatis 351 de pins 330 sont engagés
contre le bord plat 352 en renfoncement 331 du disque 322. Le déplacement du disque 322 sur
arbre 111 s'effectue par l'action d'embrayage 304 contre
printemps 314 (Fig.11). Un
interrupteur électrique (non illustré) du mécanisme d'embrayage 304 il
s'excite d'une source d'alimentation CC et a deux positions, un pour la
décélération et l'autre pour l'accélération.
Dans les deux positions, 304 est embrayé pour retirer le disque
d'embrayage 322 du disque d'embrayage 325, momentanément. Pour la ralentir ou la position
d'accélération, l'alignement déplacé d'éclateur éléments 222 est avec le
224f, 223f et 224r, éléments terminaux de 223r éclateur.
Cependant, seulement le 224f, éléments d'éclateur 223f sont mis
en service avec condensateurs appropriés pour le poste de l'accélération,
tandis que dans la position de décélérer, seulement le 223r et éléments
éclateur 224r sont inversés dans le circuit avec leurs condensateurs
associés.
Bien sûr, lorsque
isolante disque 236 est déplacée par embrayage 304, ses bornes de
gap, 222, 225 et 228 (Fig.14 et Fig.18) sont tous déplacés dans
la position d'alignement de 236X pour susciter les lignes " r
" et " f " des éléments de l'éclateur fixe. Bien que l'accélération et décélération
postes de disque 236 sont les mêmes, c'est la mise en service de la 223,
224 ou 266, 267 exemplaire " r " ou " f " paires de
terminaux qui détermine si le rotor accélérera jusqu'à ou lentement vers le
bas.
Le déplacement
momentané du disque d'embrayage 322 embrayage disque 325 résultats
en rotation du disque 325 sur disque 322 grâce à un angle de 120
degrés. La bille et ressort crantage 320,
321 en disque 325, se positionne entre une fossette détente 328 et
une 328 un succédant à une position de 120 degrés sur disque 325.
Comme 332 énoncée,
plat de broche 330 se déplace sur la surface 350 du disque 322,
et broche 330 laisse la rainure de la broche porte 331/352 le
long de la rampe 333 en disque 322 pendant la levée momentanée du
disque 322 par embrayage 304.
Broche 330 retombe
dans la rainure suivante 331 à un point 120 degrés supplémentaires sur
tout disque 322. Broche 330 tombe
en place dans la rainure 331 sur rampe 334. Broches 330 sont
rotatifs dans leurs supports 353, alors que pour une rotation vers la
droite ou vers la gauche, le plat 351 se livrera le 352 plat par
la rampe particulière qu'il rencontre.
La décélération ou
l'accélération due à l'action de l'embrayage 304 apparaît donc dans un
intervalle de 120 degrés de rotation du disque en 325. Durant cet intervalle, disque 322 peut-être
seulement se déplacer une fraction de cet arc.
On a décrit plus tôt,
un système de moteur électrique dans lequel au moins un électro-aimant est dans
une position fixe et un deuxième électroaimant de configuration similaire est
juxtaposé avec elle dans une relation de polarité magnétique tel que, lorsque
les noyaux des électro-aimants sont excités, les visages juxtaposés noyau
repoussent mutuellement. Celui de base
étant fixé et le second noyau étant libre de ses mouvements, toutes les pièces
jointes pour le second noyau d'électro-aimant seront déplace avec lui. Par conséquent, si une pluralité des noyaux
fixes sont placés sur un boîtier de confinement circulaire, et, dans le corps
de pompe, cœurs sur un arbre sont libres de se déplacer, l'arbre est instamment
prié par rotation chaque fois que le fixe juxtaposés et de carottes rotatifs
sont alignées sous tension. Les fixes et
les noyaux mobiles sont connectés à éclateur éléments terminaux ainsi qu'au
autres éléments terminaux de l'éclateur sont connectés aux condensateurs qui
sont facturés à haute tension de générateurs de signaux unipolaires pulsé. Ces condensateurs sont déchargés par
électro-aimants à travers les lacunes d'étincelle. En passant des groupes choisis de
condensateurs en paires sélectionnées des éléments éclateur pour décharge à
travers les électro-aimants, le rotor des systèmes réseau circulaire est
accéléré et ralenti.
En limitant un
électro-aimant fixe tableau dans une configuration linéaire, avec un
électro-aimant linéairement mobile auquel est attaché un outil de travail,
excitant les paires juxtaposés d'électro-aimants par décharge de condensateur,
aboutit à la génération de force linéaire pour des outils tels que les presses
poinçonneuses, ou pour l'accomplissement des projectiles avec une énergie
considérable.
EDWIN GRAY:
ALIMENTATION EFFICACE ADAPTÉE AUX CHARGES INDUCTIVES
Brevet US 4 595 975 17 juin 1986 Inventeur: Edwin V. Gray snr.
ALIMENTATION EFFICACE ADAPTÉE AUX CHARGES
INDUCTIVES
Veuillez noter qu'il s'agit d'un extrait de
re-formulation de ce brevet. Il décrit le circuit utilisé avec tube de
puissance de Edwin Gray. S'il vous plaît être conscient Edwin voulait à tout
prix, de dissimuler toute technologie utile lors de l'obtention de brevets afin
d'encourager les investisseurs, alors s'il vous plaît comprendre que ce brevet
ne peut pas être destiné à vous dire comment faire un système de travail de ce
type.
Fig.1 est un schéma
de circuit schématique de l'installation motrice électrique.
Fig.2 est une vue en
coupe altitudinal de l'élément de conversion électrique.
Fig.3 est une vue en
plan coupe prise le long de la ligne 3--3 de Fig.2.
Fig.4 est une vue en
plan coupe prise le long de la ligne 4--4 de Fig.2.
Fig.5 est un
diagramme de circuit schématique du circuit d'entrée courant alternatif (partie
de Fig.1).
RÉSUMÉ DE
L'INVENTION
La présente invention
fournit un système de pilotage plus efficace comprenant une source de tension
électrique ; un vibrateur connecté à la source de basse tension pour former un
signal pulsé ; un transformateur relié au vibrateur pour recevoir le signal de
pulsation ; une source de haute tension, le cas échéant, connecté à un
redresseur à pont-type ; ou le redresseur pont type connecté à la sortie
d'impulsions haute tension du transformateur ; un condensateur pour la
réception de la sortie d'impulsions de tension ; un élément de conversion ayant
anodes de premiers et deuxième, électro-conducteur signifie pour recevoir une
charge placée sur l'anode de la deuxième et une borne de sortie connecté à la
charge de recevoir les moyens, l'anode deuxième étant connecté au condensateur
; un commutateur connecté à la source de tension électrique et à l'anode
première ; et une charge inductive reliée à la borne de sortie par lequel une
décharge d'énergie élevée entre les anodes de premières et deuxième est
transférée à la charge de recevoir les moyens, puis à la charge inductive.
Comme une
sous-combinaison, la présente invention inclut également un élément de
conversion comprenant un logement ; une premier anode basse tension montée sur
le boîtier, l'anode premier adapté pour être connecté à une source de tension ;
une deuxième anode haute tension montée sur le boîtier, le deuxième anode
adapté pour être connecté à une source de tension ; moyens électro-conducteur
positionné sur l'anode deuxième et espacement en découlent pour recevoir une
charge, le recevant les moyens étant montés sur le boîtier ; et une borne de
sortie communiquant avec les frais de réception moyens, dit terminal adapté
pour être relié à une charge inductive.
L'invention inclut
également une méthode pour l'alimentation d'une charge inductive, comprenant
les étapes qui constituent une source de tension, pulsant un signal de ladite
source ; augmentation de la tension du signal de ladite ; l'intérieur le dit
signal ; stockage et augmentant le signal ; conduite a dit signal à une anode
de haute tension ; fournissant une basse tension vers une deuxième anode pour
former une décharge d'énergie élevée ; couplage électrostatiquement la décharge
d'une charge récepteur ; effectuer l'exercice d'une charge inductive ; un
deuxième condensateur de couplage à la charge ; et le deuxième condensateur de
couplage à la source.
C'est un but de la
présente invention de fournir un système pour piloter une charge inductive,
quel système est considérablement plus efficace que tout maintenant en vigueur.
Un autre objet de la présente invention est de fournir un système pour une
charge inductive qui est fiable, est peu coûteux et simplement construit au
volant.
Les objets ci-dessus de
la présente invention ainsi que divers autres objets, avantages,
caractéristiques et leurs résultats qui seront manifesteront à ceux du métier à
la lumière de cette divulgation peuvent être réalisés avec la réalisation
exemplaire de l'invention décrite ci-après en détail et illustrée dans les
dessins annexés.
DESCRIPTION DE
LA RÉALISATION PRÉFÉRÉE
Alors que la présente
invention est susceptible de modifications et de diverses constructions
alternatives, un mode de réalisation est indiqué sur les dessins et est
ci-après décrites en détail. Il faut comprendre cependant qu'il n'est pas
l'intention de limiter l'invention de la forme particulière divulguée ; mais,
au contraire, l'invention doit couvrir toutes les modifications, les
équivalents et les autres constructions relevant de l'esprit et la portée de
l'invention, telle qu'exprimée dans les revendications annexées.
Il y a divulgués ici un
système d'entraînement électrique qui, en théorie, permet de convertir l'énergie
électrique basse tension d'une source telle qu'une batterie d'accumulateurs
électrique à une haut potentiel, haute énergie impulsion de courant qui peut
être capable de développer une force de travail à la sortie inductive de
l'appareil qui est plus efficace que celle qui est capable d'être produite
directement à partir de la source d'énergie.
L'amélioration de l'efficacité est renforcée par la capacité de
l'appareil à retourner la partie de l'énergie initiale mis au point et ne pas
utilisé par la charge inductive dans la production d'énergie mécanique, à la
source pour utilisation ailleurs, ou pour le stockage ou le réservoir d'énergie
même ou deuxième.
Ce système met en
oeuvre les résultats mentionnés en exploitant la " électrostatique "
ou " impulsion " énergie créé par un éclair intense généré dans une
conversion électrique construite spécialement tuyau de l'élément de
commutation. Cet élément utilise une
anode de basse tension, une anode de haute tension et un ou plusieurs "
électrostatique " ou recevoir les grilles de frais. Ces grilles sont de taille physique et
convenablement positionné, pour être compatibles avec la taille du tube et donc
directement lié à la quantité d'énergie serait anticipée lorsque l'appareil est
en marche.
L'anode de basse
tension peut-être comporter un dispositif résistif pour aider à contrôler la
quantité de courant provenant de la source d'énergie. Cette anode de basse tension est reliée à la
source d'énergie grâce à un collecteur ou un générateur d'impulsions à semi-conducteurs
qui contrôle le minutage et la durée de l'étincelle d'énergie au sein de
l'élément. L'anode de la haute tension
est relié à un potentiel de haute tension développé par les circuits associés. Une décharge d'énergie se produit au sein de
l'élément lorsque les circuits de contrôle externe le permettent. Cette courte durée, haute tension,
l'impulsion d'énergie haute tension est capturée par les grilles "
électrostatiques " l'intérieur du tube, stockée momentanément, puis
transférée à la charge inductive sortie.
L'augmentation du
rendement prévu dans la conversion de l'énergie électrique en énergie mécanique
au sein de la charge inductive est attribuée à l'utilisation de la
synchronisation plus optimum dans l'introduction de l'énergie électrique à
l'appareil de charge, pendant la période optimale.
Renforcement de la conservation de l'énergie s'effectue en capturant une partie
importante de l'énergie produite par la charge inductive lorsque le domaine de
l'énergie utile s'effondre. Normalement,
cette énergie est dissipée dans les pertes de charge qui vont à l'encontre de
l'utilisation de l'énergie souhaitée et ont jusqu'ici été acceptées parce
qu'aucun des moyens appropriés n'avaient été élaborés pour canaliser cette
énergie et restaurez-la sur un périphérique de stockage d'énergie adapté.
La présente invention
concerne deux notions ou caractéristiques.
Le premier de ces caractéristiques est observé avec l'introduction d'un
cur-loyer énergisant par le biais de l'inducteur. L'inducteur crée une force contraire (force contre électromotrice ou
CEMP) qui s'oppose à l'énergie introduite dans l'inducteur. Cette CEMF augmente pendant tout le temps que
l'énergie introduite est en augmentation.
Dans des applications normales d'un courant
alternatif à une charge inductive pour applications mécaniques, les travaux
utile de l'inducteur s'effectue avant la résiliation de la demande
d'énergie. L'excès d'énergie appliquée
est ainsi gaspillée.
Les tentatives précédentes pour fournir des
intrants énergétiques à un inducteur de durées limitées à cette période où le
transfert optimal d'énergie inductif à l'énergie mécanique se produit, ont été
limités par la capacité d'un tel dispositif pour gérer le courant élevé
nécessaire pour optimiser le transfert d'énergie.
La deuxième caractéristique est observée
lorsque l'excitation actuelle est retiré de l'inducteur, quand le courant est
diminué, l'inducteur génère un EMF qui s'oppose à la suppression du courant ou,
en d'autres termes, produit une source d'énergie à la sortie de l'inducteur qui
simule l'original source d'énergie, réduite l'énergie réelle retiré du circuit
de la charge mécanique. Cela "
régénéré ", ou excès, énergie a déjà été perdue en raison de l'omission de
fournir une capacité de stockage de cette énergie.
Cette invention, haute
tension, haute tension, impulsion de courte durée d'énergie est appliquée sur
la charge inductive par l'élément de conversion. Cet élément rend possible l'utilisation de
certains de cette énergie impressionné à l'intérieur d'un arc à travers un
éclateur, sans la détérioration qui en résulte des éléments de circuit
normalement associés aux arcs électriques de haute énergie.
Cette invention fournit
également pour la capture d'une certaine partie de l'énergie induite par le high-kick
inductive produite par le retrait brutal du courant introduit. Ce retrait brutal du courant est préposé à la
résiliation de l'arc stimulant. La
pointe de la tension ainsi créée est imposée à un condensateur qui couple le
standard actuel à un périphérique de stockage d'énergie secondaire.
Un arrangement de
roman, mais pas indispensable, circuit offre une commutation de la source
d'énergie et le périphérique de stockage de l'énergie. Cette commutation peut-être être agencée de
manière à actionner automatiquement à des moments déterminés. La commutation peut être à certaines périodes
déterminées expérimentalement avec un appareil particulier, ou peut être
actionnée par un dispositif de contrôle qui mesure la teneur en énergie
relative des deux réservoirs énergétiques.
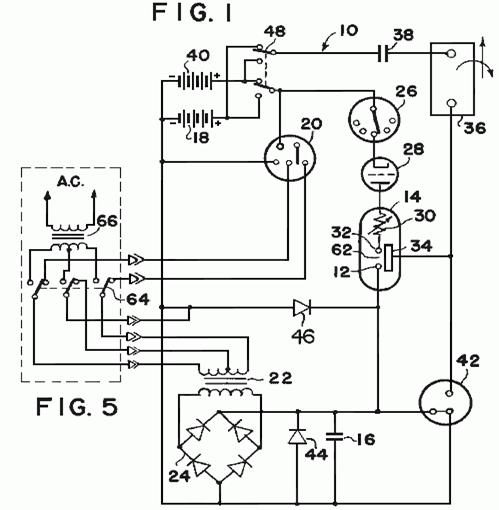
Se référant maintenant à la Fig.1, le système 10 décrira de plus
amples renseignements. Le potentiel de
l'anode de haute tension, 12 de l'élément de conversion 14 est
développé à travers le condensateur 16.
Cette tension est produite en dessinant un faible courant d'une source
de la batterie 18 à travers le vibrateur 20. L'effet du vibrateur est de créer une
pulsation d'entrée au transformateur 22.
Le rapport des spires du
transformateur est choisi pour optimiser l'appliqué à un redresseur à pont-type
24 volt-âge. La sortie du
redresseur est alors une série d'impulsions haute tension du courant
modeste. Lorsque la source est déjà de
la haute tension, type CA, il peut être couplé directement sur le redresseur
pont-type.
Par application répétitive de ces impulsions
de sortie du redresseur pont-type au condensateur 16, une charge de
haute tension, de haut niveau est construite sur le condensateur.
Contrôle de la
conversion de tuyau de l'élément de commutation est maintenu par un commutateur
26. Une série de contacts montés
radialement sur un puits ou un dispositif de commutation à semi-conducteurs
sensible au temps ou autre variable peut-être être utilisé pour cet élément de
contrôle. Une commutation élément tube type énergie unidirectionnel path 28 est
introduit entre le dispositif de collecteur et le tube d'élément de commutation
pour empêcher l'énergie élevée, un arc au chemin courant collecteur
conversion. Lorsque le tuyau de
l'élément commutation est fermé, le courant de la source de tension 18 est
routé via un élément résistif 30 et d'une anode de basse tension 32. Cela provoque une décharge d'énergie élevée
entre les anodes dans la conversion du tuyau 14 de l'élément de
commutation.
La teneur en énergie de
l'impulsion à haute énergie est électrostatiquement couplée pour les grilles de
conversion 34 de l'élément de conversion. Cette charge électrostatique est appliquée
via une sortie borne 60 (Fig.2) à travers de l'inductance de
charge 36, induisant un champ électromagnétique puissant sur la charge
inductive. L'intensité de ce champ
électromagnétique est déterminée par le fort potentiel électromoteur développé
sur les grilles de l'électrostatiques et la durée de temps très court nécessaire
pour développer l'impulsion de l'énergie.
Si la charge inductive est couplée
magnétiquement à une charge mécanique, un fort couple initial est développé qui
peut être utilisée efficacement pour produire un travail physique
Dès la cessation de
l'impulsion de l'énergie (arc) au sein de la conversion de tuyau que la charge
inductive est découplée de l'élément de commutation, permettant le champ
électromagnétique sur la charge inductive s'effondrer. L'effondrement de ce champ d'énergie induit
dans la charge inductive un compteur EMF.
Ce compteur EMF crée un potentiel positif à travers un deuxième
condensateur qui, à son tour, est induit dans le deuxième périphérique de
stockage de l'énergie ou la batterie 40 comme un courant de charge. Le montant de la charge actuelle est
disponible à la batterie 40 dépendant des conditions initiales dans le
circuit au moment de la décharge dans la conversion de commutation tuyau de
l'élément et la quantité d'énergie mécanique consommée par la charge de
travail.
Un dispositif de
protection de l'éclateur 42 est inclus dans le circuit pour protéger la
charge inductive et les éléments de redresseur de courants de décharge trop
importante. Les potentiels au sein du
circuit ne doivent dépasser les valeurs prédéfinies, fixés par la taille
mécanique et l'espacement des éléments dans le dispositif de protection,
l'excès d'énergie est dissipée (ponté) par le dispositif de protection du
circuit commun (Terre).
Diodes 44 et 46 contournement
la remise des gaz excédentaire générée lorsque le " Energy Conversion de
commutation élément Tube " se déclenche.
Un élément de commutation U permet soit source de stockage d'énergie à
utiliser comme source d'énergie primaire, tandis que l'autre batterie est
utilisé comme l'unité de récupération d'énergie. Le commutateur facilite échangeant la source
et l'unité de récupération à optimale selon la fréquence déterminée par
l'utilisation du tuyau de l'élément commutation de la conversion. Ce changement peut se faire manuellement ou
automatiquement, tel que déterminé par le choix de commutation élément parmi
une grande variété de facilement disponible à la fin.


Fig.2, Fig.3, et Fig.4
montrer la structure mécanique de la conversion du tuyau 14 de l'élément
de commutation. Un boîtier extérieur
n'importe quel matériau isolant tels que le verre peut être 50. Les anodes 12 et 22 et grilles 34a
et 34b sont fermement fixés par matériau non-conducteur entretoise 54 et
56. L'élément résistif 30 peut-être
être introduit dans le chemin de la basse tension anode pour contrôler des courants
de pointe grâce à la conversion de tuyau de l'élément de commutation. L'élément résistif est peut-être d'une pièce,
ou il peut être construit d'un ou plusieurs éléments résistifs pour obtenir le
résultat souhaité.
Le matériau d'anode
peut être identique pour chaque anode, ou peut être de différentes matières
pour chaque anode, comme dicté par l'utilisation plus efficace de l'appareil,
tel que déterminé par une recherche appropriée au moment de la production pour
l'utilisation prévue. La forme et l'espacement
des grilles électrostatiques est également sensible à la variation avec la
demande (conditions de tension, le courant et énergie).
C'est la prétention de
l'inventeur que par accouplement judicieuse des éléments de la conversion de
tuyau de l'élément et la sélection des composants de l'éléments de circuit du
système de commutation, les résultats théoriques souhaités soient
atteints. Il est l'inventeur que ce
processus d'accouplement et la sélection est bien en deçà des capacités de la
technique de recherche et de développement intensive.
Laissez-le être dit ici
que le son remplacement par une source électrique courant alternatif sous
réserve de l'actu-loyer exigé et/ou tension mise en forme de calendrier, soit
avant d'être considéré comme une source d'énergie primaire, ou là-après, ne
doit pas être interprété pour modifier l'utilisation décrite ou la demande
d'énergie primaire en quelque sorte.
Cette conversion de l'énergie est facilement obtenue par l'un d'une
multitude de principes bien établis. Le mode de réalisation préféré de
l'invention suppose simplement optimum et utilisation optimale bénéficient de
cette invention lorsqu'il est utilisé avec les appareils d'énergie portative
semblables dans son principe à la batterie d'électrolyte ou des piles sèches.
Cette invention se
propose d'utiliser l'énergie contenue dans un autogénérés haute tension
électrique spike (impulsion d'énergie) à stimuler électriquement une charge
inductive : cette charge inductive étant alors capable de convertir l'énergie
ainsi fournie dans une sortie électrique ou mécanique utile.
En fonctionnement la
haute tension, spike électrique de courte durée est généré en déchargeant le
condensateur 16 dans l'ensemble de l'éclateur dans le tuyau de l'élément
commutation conversion. Le potentiel de
haute tension nécessaire est stocké sur le condensateur en étapes
incrémentielles, additifs de redresseur pont de type 24. Lorsque la source d'énergie est un
périphérique de stockage d'énergie électrique de courant continu, tels que la
batterie 12, l'entrée vers le pont redresseur est fournie par le
transformateur élévateur de tension 22, qui à son tour mise sous tension
du vibrateur 20, ou hachoir à l'état solide ou un dispositif similaire
pour conduire correctement les circuits transformateur et redresseur.
Lorsque la source
d'énergie est un courant alternatif, commutateurs 64 débrancher le
transformateur 22 et l'entrée du redresseur pont-type 24 est
fournie par le transformateur élévateur de tension 66, qui s'excite à
son tour dans le vibromasseur 20, ou hachoir à l'état solide ou un
dispositif similaire pour conduire correctement les circuits transformateur et
redresseur.
La sortie de répétitions du redresseur pont augmente progressivement la charge
du condensateur vers son maximum. Cette
accusation est reliée électriquement directement à l'anode de la haute tension 12
du tuyau de l'élément commutation de la conversion. Quand la basse tension anode 32 est
connecté à une source de courant, un arc est créé dans l'éclateur désigné 62
de la conversion de tuyau de l'élément équivalent au potentiel stocké sur
l'anode de haute tension et le courant disponible de l'anode de basse tension
de commutation.
Parce que la durée de
l'arc est très courte, la tension instantanée et courant instantané peuvent
être très élevé. La puissance nominale
de crête instantanée est donc également très élevée. Au sein de la conversion de commutation tuyau
de l'élément, cette énergie est absorbée par les grilles 34a et 34b
monté sur sa circonférence à l'intérieur du tube.
Contrôle de l'épi de
l'énergie au sein de la conversion de tuyau de l'élément de commutation se fait
par un commutateur mécanique, ou à l'état solide, qui ferme le chemin de
circuit de l'anode de basse tension de la source de courant à ce moment où la
livraison de l'énergie à la charge de sortie est plus propice. N'importe quel nombre de haute précision
standard, dispositifs de réglage variable sont disponibles à cet effet. Lorsque le contrôle de la vitesse répétitif
de la sortie du système est nécessaire, c'est réalisé en contrôlant le temps de
connexion à l'anode de basse tension.
Ainsi il peut être
prévu un système d'entraînement électrique ayant une source basse tension
couplée à un vibrateur, un transformateur et un redresseur en pont-type pour
fournir un signal pulsé haute tension d'un condensateur de première. Lorsqu'une source de haute tension est par
ailleurs disponible, il peut être couplé directement à un redresseur à
pont-type, causant un signal de pulsation à un condensateur de première. À son tour, le condensateur est couplé à une
anode de haute tension d'un tuyau de l'élément commutation conversion
électrique. L'élément inclut également
une anode de basse tension, qui à son tour est reliée à une source de tension
par un commutateur, un tuyau de l'élément commutation et une résistance
variable. Monté autour de l'anode de la
haute tension est une plaque de récepteur de charge qui à son tour, est couplée
à une charge inductive de transmettre une haute tension décharge de l'élément à
la charge. Également couplée à la charge
est un deuxième condensateur pour stocker l'arrière EMF créé par le champ
électrique s'effondrant de la charge lorsque le courant à la charge est bloqué. Le deuxième condensateur à son tour est couplé à la source de tension.
ASPDEN & ADAMS:
ÉLECTRIQUE MOTEUR / GÉNÉRATEUR
Brevet GB 2 282 708 12 avril 1995 Inventeurs: Harold Aspden (
ÉLECTRIQUE MOTEUR / GÉNÉRATEUR
Cette version du brevet a été re-formulée
dans le but de rendre plus facile à lire et à comprendre. Il décrit la
conception d'un électro-aimant pulsé / aimant permanent moteur qui est capable
d'une puissance supérieure qu'elle est propre puissance d'entrée de sortie.
RÉSUMÉ
Un moteur-générateur électrodynamique
dispose d'un rotor à aimant permanent pôle saillant en interaction avec les
pôles de stator saillant pour former une machine fonctionnant sur le principe
de la réluctance. La puissance
intrinsèque ferromagnétique des aimants fournit le couple d'entraînement en
intégrant les pôles de Registre tandis que les impulsions de courant
démagnétiser les pôles de stator comme les pôles distincts. En moins d'énergie est nécessaire pour une
démagnétisation stator qu'on introduit dans le lecteur de réticence par le système
thermodynamique alimentant l'état ferromagnétique, autant que la machine
fonctionne refroidi en vertu de l'interconnexion avec un nombre inégal de pôles
rotor et le stator d'enroulement statorique.
Une construction du rotor est divulguée (Fig.6 et Fig.7). L'impulsion de courant peut-être être telles
que provoque la répulsion des pôles du rotor.
DOMAINE DE
L'INVENTION
Cette invention se
rapporte à une forme de moteur électrique qui sert une fonction génératrice en
ce que la machine peut agir refroidi pour développer la puissance électrique de
sortie ou peut générer le couple d'entraînement mécanique avec efficacité
anormalement élevée par rapport à la puissance électrique absorbée. Le domaine de l'invention est celle des
moteurs à réluctance commutée, machines de sens qui ont des pôles saillants et
exploiter en vertu de l'attraction magnétique mutuelle et/ou la répulsion entre
les pôles magnétique. L'invention
concerne une forme de moteur d'hésitation qui incorpore des aimants permanents
pour établir la polarisation magnétique.
CONTEXTE DE
L'INVENTION
Il a été proposé dans
le passé pour les machines où le mouvement relatif des aimants peut en quelque
sorte se développent anormalement strong force les actions qui sont censées
aboutir à plus de puissance qu'est fourni comme entrée électrique. Principes d'électrotechnique orthodoxe ces
suggestions ont semblé contredire les principes reconnus de la physique, mais
il devient de plus en plus évident que la conformité avec la première loi de la
thermodynamique permet qu'un gain dans l'équilibre de la puissance
électromécanique fournis que c'est compensée par un refroidissement thermique.
En ce sens, il faut
étendre le contexte physique du liquide de refroidissement pour inclure, non
seulement la structure de la machine et l'environnement immédiat, mais
également au niveau quantique secondaire de ce qu'on appelle, en physique
moderne, le champ du point zéro. Il
s'agit de l'activité du champ du milieu sous vide qui existe dans l'espace
entre les noyaux atomiques et les électrons atomiques et est le siège de
l'action qui est celle associée à la constante de Planck. L'énergie est constamment échangée entre
cette activité et de la matière coextensive formes mais normalement ces
fluctuations d'énergie de préserver, dans l'ensemble, une condition d'équilibre
pour que cette action passe inaperçu au niveau technologique.
Physiciens deviennent
de plus en plus conscients du fait que, comme avec la gravitation, ainsi le
magnétisme est un itinéraire en qui nous pouvons accéder à la mer de l'énergie
qui règne dans le vide. Historiquement,
le bilan énergétique a été écrit en termes mathématiques en assignant "
négatif " potentiel de gravitation ou le magnétisme. Cependant, c'est seulement une manière
déguisée de dire que le champ vide, convenablement influencée par la masse d'un
corps dans la localité de gravitaire ou par magnétisme dans un ferromagnétique
a la fois la capacité et une envie de jeter l'énergie.
Maintenant, cependant,
il y a prise de conscience croissante de l'énergie technologique générant le
potentiel de ce fond de terrain et intérêt se développe dans des techniques
pour " pomper " le couplage entre la matière et le champ vide pour
calculer la puissance de cette source d'énergie cachée. Ce type de recherche peut établir que cette
action s'appuiera sur la température du fond diffus de 2,7 K du milieu spatial
dans lequel la terre se propage à environ 400 km/s. L'effet envisagée pourrait bien laisser un
cool " traînée de condensation " dans l'espace comme une machine
offrant la chaleur, ou livrant une forme électrique plus utile d'énergie qui
reviendra à la chaleur, se déplace avec le corps de la terre par le biais de
cet espace.
En termes de physique
pure, documents d'information a été déposé récemment dans le numéro d'août 1993
de Physique E Review, vol. 48, p. 1562-1565 sous le titre: " Extraire
l'énergie et chaleur de l'aspirateur ", rédigé par D. C. Cole et H. E.
Puthoff. Si la connexion n'est pas référencée
dans ce document, un de son auteur présenté des preuves expérimentales sur ce
thème lors d'une conférence d'avril 1993 qui s'est tenue à Denver aux
États-Unis. La centrale électrique
plasma périphérique discuté lors que la Conférence a fait l'objet de l'U.S.
brevet no 5 018 180, l'inventeur du dossier étant K. R. Shoulders.
L'invention, pour être
décrites ci-dessous, opère en extrayant l'énergie d'un système magnétique dans
un moteur et la base scientifique pertinente à cette technologie peut être
apprécié des enseignements du E. B. Moullin, un professeur de Cambridge de
l'électrotechnique qui était président de l'Institution of Electrical Engineers
dans U. K. Cet état de la technique est
décrites ci-dessous dans le cadre de l'explication du fonctionnement de
l'invention.
L'invention présentée
ici concerne caractéristiques spécifiques de conception structurelle d'une
machine adaptée pour un bon fonctionnement, mais elles ont aussi de la
nouveauté et l'activité mérite spécial lors d'une opération fonctionnelle. Ce qui est décrit est tout à fait distincte
des propositions de l'état de la technique, un nouveau genre de moteur étant
proposé par Gareth Jones lors d'un colloque de 1988 qui s'est tenu à Hull, au
Canada, sous les auspices de l'Association planétaire des énergies propres. Jones a proposé l'adaptation d'un alternateur
automobile qui génère CA triphasé pour la rectification et l'utilisation comme
source d'alimentation pour l'installation électrique de l'automobile. Cet alternateur a un rotor à aimant permanent
et Jones a suggéré qu'il pourrait être utilisé, avec un gain de rendement élevé
et couple performance, en il fonctionnant comme un moteur avec le circuit
d'enroulement triphasé excité afin de favoriser la forte répulsion entre les
pôles de l'aimant et les pôles de stator après les pôles en registre.
Toutefois, la machine
Jones n'est ne pas un exploitant les avantages de l'invention à être décrits,
parce qu'il n'est pas strictement un moteur d'hésitation ayant des pôles
saillants sur le stator et le rotor. Le
stator pôles dans la machine de Jones sont formés par la configuration sinueuse
dans une forme de fente de stator, le nombre de créneaux horaires distribué
uniformément sur la circonférence interne du stator et ne constituent ne pas un
système de pôle qui se prête à l'action de flux magnétique pour être désignés
par référence à l'expérience E. B. Moullin.
La machine de Jones
fonctionne en générant un champ tournant du stator qui, dans un sens, pousse
les pôles du rotor vers l'avant, plutôt qu'en les tirant de la manière dans le moteur
synchrone normal. En conséquence, la
machine de Jones s'appuie sur l'excitation de courant électrique du moteur
produisant un système de champ qui tourne en douceur, mais a un modèle de
polarité qui est contraint par le contrôle de commutation pour garder derrière
les pôles du rotor en affirmant un entraînement continu répulsive.
Une autre proposition
de l'état de la technique qui se distingue de cette invention est celle d'un
des déposants, H. Aspden, à savoir l'objet de U.K. Patent no 2 234 863 (US
Patent No.4,975,608 série homologue).
Bien que cette dernière invention est centrée à l'extraction d'énergie
du champ par le même processus physique que l'invention en cause, la technique
permettant d'accéder à cette énergie n'est pas optimale en ce qui concerne la
structure ou la méthode utilisée.
Considérant que cette divulgation antérieure, la commutation de la
pulsion de réticence excité les polonais dans leur phase d'approche,
l'invention en cause, dans l'un de ses aspects, offre des avantages distincts
par démagnétisation ou le renversement de l'aimantation dans la phase de
séparation de pôle d'opération.
Il y a des avantages
inattendus dans la mise en œuvre proposée par l'invention en cause, dans la
mesure où une recherche récente a confirmé qu'elle nécessite moins de puissance
d'entrée pour éteindre l'attraction mutuelle à travers un espace d'air entre un
aimant et d'un électro-aimant, qu'il ne le fait pour l'allumer. Habituellement, en électromagnétisme, une
symétrie de renversement est attendue, découlant de l'enseignement traditionnel
de la marche à suivre et arrière magnétomotrice forces régissent le flux qui en
résulte dans un circuit magnétique.
Cela sera expliqué plus
loin après avoir décrit la portée de l'invention.
BRÈVE
DESCRIPTION DE L'INVENTION
Selon un aspect de
l'invention, une machine à moteur/générateur électrodynamique est constituée
par un stator configuré pour fournir un ensemble de pôles de stator, un
ensemble correspondant des enroulements magnétisantes monté sur l'ensemble du
pôle du stator, un rotor ayant deux parties dont chacune a un ensemble de
pièces de pôle saillant, les sections de rotor étant axialement espacées le
long de l'axe de rotation du rotor, la magnétisation du rotor signifie jeté
entre les sections de deux rotor présentées pour produire un champ magnétique
unidirectionnel qui magnétiquement polarise les pôles du rotor, par lequel les
visages de poteau de section d'un rotor ont tous une polarité nord et les
visages de pôle de l'autre section du rotor ont tous une polarité Sud et
connexions du circuit électrique entre une source de courant électrique et les
enroulements de stator magnétisantes arrangés pour réglementer le
fonctionnement de la machine en admettant des impulsions de courant pour une
durée déterminée selon à la position angulaire du rotor, les légumineuses ont
un sens qui tend à s'opposer à la polarisation induite dans le stator de la
polarisation du rotor dans le stator et pôles de rotor séparent depuis une
position en registre, auquel cas l'action des moyens la magnétisation du rotor
fournit une force de moteur d'entraînement de réticence à apporter des pôles de
stator et le rotor dans le registre et l'action du stator enroulements de
magnétisation s'oppose à la réticence de l'homologue effet de freinage comme
les pôles distincts.
Selon une
caractéristique de l'invention, le circuit reliant la source de courant
électrique et les enroulements magnétisantes du stator est conçu pour fournir
des impulsions de courant qui ont suffisamment de force et de durée de fournir
une démagnétisation des pôles du stator comme les pôles de stator et rotor
séparés d'une position en registre. À
cet égard, on notera que, afin de supprimer le couple d'entraînement de
réticence ou de couple, selon que les pôles sont convergentes ou séparant, de
frein, une certaine quantité d'énergie électrique doit être nourris aux
enroulements magnétisantes du stator. En
un sens ces enroulements sont vraiment " désaimantation enroulements
" parce que la polarité des connexions circuit admettre le pouls actuel
dans la direction de démagnétisation.
Toutefois, il est plus courant pour désigner
enroulements sur noyaux magnétiques comme " par polarisation enroulements
" même s'ils peuvent fonctionner comme des enroulements primaires ou enroulements
secondaires, le premier servant de la fonction de magnétisation avec puissance
d'entrée et le dernier desservant une démagnétisation fonction avec retour de
puissance. Selon une autre
caractéristique de l'invention, le circuit reliant la source de courant
électrique et les enroulements magnétisantes du stator est conçu pour fournir
des impulsions de courant qui ont suffisamment de force et de durée de fournir
une inversion du sens de flux magnétique dans les pôles de stator comme les
pôles de stator et rotor séparés depuis une position en registre, auquel cas
les dessiner à la puissance fournie par la source de courante électrique pour
fournir le couple vers l'avant supplémentaire.
Selon une autre
caractéristique de l'invention, la source de courant électrique reliée à un
stator par polarisation sinueux d'un premier pôle du stator comprend, au moins
partiellement, les impulsions électriques induites dans le stator par
polarisation sinueux d'un deuxième pôle de stator différents, le pôle du stator
définie la configuration en ce qui concerne le rotor pôle set configuration
étant telle que le premier pôle du stator est à venir dans le registre avec un
mât rotor comme le second pôle du stator se sépare de sa position en registre
avec un pôle de rotor.
Cela signifie que les
enroulements magnétisantes du stator deux pôles sont connectés afin que les
deux remplissent une fonction " démagnétisation ", l'un pour
s'opposer à l'action magnétique de l'attraction mutuelle en tirant sur les
poteaux dans le registre, une action qui se développe à un signal de sortie
actuel et l'autre à absorber cette impulsion de courant, encore une fois en
résistant à l'action inter pôle magnétique pour démagnétiser le pôle stator
comme son pôle associé rotor sépare.
Afin de faciliter la
fonction régie par cette connexion de circuit entre enroulements magnétisantes
du stator, une différence de phase est nécessaire et c'est introduit par la
conception de la machine d'avoir un nombre différent de pôles dans un ensemble
de pôles de stator du nombre de pôles du rotor dans chaque section du
rotor. Avec la fonctionnalité de section
double rotor, cela a le mérite supplémentaire d'assurant une action plus souple
du couple et de réduire les fluctuations de flux magnétique et les effets de
déperdition qui contribuent considérablement à l'efficacité de la machine.
Ainsi, selon une autre
caractéristique de l'invention, la configuration de stator fournit les pièces
polaires qui sont communs aux deux parties de rotor dans le sens que, lorsque
les pôles de stator et rotor sont en registre les pièces polaires de stator
constituent des membres ponts pour fermeture de flux magnétique dans un circuit
magnétique, y compris les moyens de la magnétisation du rotor disposés entre
les sections de deux rotor.
De préférence, le
nombre de pôles dans un ensemble de pôles de stator et le nombre de pôles du
rotor dans chaque section ne partagent pas un facteur commun de nombre entier,
le nombre de pôles du rotor dans la section d'un rotor est identique à celui
dans l'autre section du rotor et le nombre de pôles dans un ensemble stator et
le nombre de pôles dans une section du rotor se distingue par un, avec le pôle
visages de largeur angulaire suffisante pour s'assurer que le flux magnétique
produite par la magnétisation du rotor moyens peuvent trouver un itinéraire de
fermeture des flux magnétique circulaire par la voie de raccordement d'un pôle
du stator et rotor du correspondants pôles pour n'importe quelle position
angulaire du rotor.
Il est également préférable
d'un point de vue de conception pour les visages de pôle du stator de cette
invention à avoir une largeur angulaire qui n'excède pas la moitié de la
largeur angulaire d'un pôle de rotor et pour les sections de rotor former les
tôles en acier circulaires dans lequel les pôles du rotor sont formés comme les
grosses dents au niveau du périmètre avec la magnétisation du rotor signifie
comprenant une structure de noyau magnétique les visages de fin qui sont
contigus de deux ensembles de ces tôles formant le deux sections de rotor.
Selon une autre
caractéristique de l'invention, les moyens de la magnétisation du rotor est
constituée par au moins un à un aimant permanent situé avec son axe de
polarisation parallèle à l'axe du rotor.
Le moteur-générateur peut inclure un disque en métal ajouré qui présente
des caractères intermédiaire d'une substance non-aimantables monté sur un arbre
de rotor et positionné les sections deux rotor, chaque ouverture qui fournit
l'emplacement d'un aimant permanent, selon laquelle la force centrifuge
agissant sur l'aimant permanent que le rotor tourne sont absorbée par le stress
mis en place dans le disque. Aussi, le
rotor peut être monté sur un arbre qui est d'une substance non-aimantables,
permettant de minimiser les fuites magnétiques du moyen magnétisantes du rotor
par l'intermédiaire de cet arbre.
Selon un autre aspect
de l'invention, une machine à moteur-générateur électrodynamique est constituée
par un stator configuré pour fournir un ensemble de pôles de stator, un ensemble
correspondant des enroulements magnétisantes monté sur l'ensemble du pôle du
stator, un rotor ayant deux parties dont chacune a un ensemble de pièces de
pôle saillant, les sections de rotor étant axialement espacées le long de l'axe
de rotation du rotor, la magnétisation du rotor signifie incorporé dans la
structure du rotor et disposées à polariser les pôles du rotor, par lequel les
visages de poteau de section d'un rotor ont tous une polarité nord et les
visages de pôle de l'autre section du rotor ont tous une polarité Sud et
connexions du circuit électrique entre une source de courant électrique et les
enroulements de stator magnétisantes arrangés pour réglementer le
fonctionnement de la machine en admettant des impulsions de courant pour une
durée déterminée selon la position angulaire du rotor, dont les impulsions ont
une direction qui tend à s'opposer à la polarisation induite dans le stator de
la polarisation du rotor dans le stator et pôles de rotor séparent depuis une
position en registre, auquel cas l'action des moyens la magnétisation du rotor
fournit une force de moteur d'entraînement de réticence pour apporter des pôles
de stator et le rotor dans le registre et l'action du stator enroulements de
magnétisation s'oppose à la réticence de l'homologue effet comme les pôles
distincts de freinage.
Selon une caractéristique de ce dernier aspect de
l'invention, la source de courant électrique reliée à un stator par
polarisation sinueux d'un premier pôle du stator est composé, au moins
partiellement, les impulsions électriques induites dans le stator par
polarisation sinueux d'un deuxième pôle de stator différents, le pôle du stator
définie la configuration en ce qui concerne le rotor pôle set configuration
étant telle que le premier pôle du stator est à venir dans le registre avec un
mât rotor comme le second pôle du stator se sépare sa position en registre avec
un mât rotor.
BRÈVE DESCRIPTION DES DESSINS
Fig.1 présente noyau magnétique test des données montrant comment la
puissance de réactance voltampère nécessaire de mettre en place une action
constante de flux magnétique dans l'entrefer, comme assuré par une tension
constante excitation d'un magnétisant d'enroulement, en deçà de la puissance
associée liée du potentiel implicite dans l'action de la force dans l'ensemble
de cette lame d'air.
Fig.2 représente la
structure d'essai à laquelle s'applique les données Fig.1.
Fig.3 représente l'action de la magnétisation au travail dans l'apparition de
flux magnétique parcourir un entrefer et tourner un coin dans un circuit à
travers un noyau magnétique.
Fig.4 montre la
configuration d'un périphérique de test utilisé pour démontrer les principes de
fonctionnement de l'invention décrite.
Fig.5 dans ses illustrations de plusieurs représente
le pôle de rotor progressive à la relation de pôles de stator comme un rotor
tourne grâce à un éventail de positions angulaires dans un mode de réalisation
préféré de la machine selon l'invention.
Fig.6 montre la forme d'un membre de disque qui fournit l'emplacement des
quatre aimants permanents dans la machine décrite.

Fig.7 montre une
coupe transversale de la structure du circuit magnétique d'une machine qui
incarnent l'invention.
Fig.8 illustre une configuration de pôles de six
stator avec un rotor de sept pole et dépeint une schématique connectés en
série, qui relie des enroulements magnétise des pôles de stator diamétralement
opposés.
DESCRIPTION DÉTAILLÉE DE L'INVENTION
Le fait que l'on peut extraire l'énergie de
la source de quels pouvoirs l'état ferromagnétique intrinsèque n'est pas
explicitement évident des manuels existants, mais il est implicite et, en
effet, devient-il explicite une fois a souligné, dans un manuel rédigé par E.
B. Moullin. Son livre " Les
Principes de l'électromagnétisme " publié par Clarendon Press, Oxford (3e
édition, 1955) décrit aux pages 168-174 une expérience porte sur l'effet des
trous d'air entre les pôles dans un circuit magnétique. Les données obtenues sont reproduites à la Fig.1,
où le professeur Moullin montre une courbe représentant le courant alternatif
d'entrée pour les entrefers différents, étant donné que la tension est
constante. Dans la même figure, Inexia
présente le courant théorique qui aurait besoin d'être appliquée pour maintenir
la même tension, et le pôle des forces à travers l'entrefer, en supposant (a)
aucun flux de fuite et (b) qu'il est une égalité totale entre l'apport
énergétique inductive et le potentiel de l'énergie mécanique de l'aimantation
qui est créé dans l'entrefer dans une période de cycle de quart à la fréquence
d'excitation de courant CA.
Les données montrent
que, même si le niveau de polarisation magnétique est bien inférieure à la
valeur de saturation, étant confiné à une plage qui est considérée comme la
gamme de perméabilité linéaire dans la conception du transformateur, il y a un
déclin évident du courant, et donc la puissance réactive voltampère entrée
augmentations nécessaires, sous le nom actuelles, par rapport à celle prédite
par la mécanique potentiel construit dans les intervalles d'air. À moins que les flux de fuite est excessive,
voilà une preuve claire de l'activité anormale de l'énergie.
Inexia traite le flux
de fuite déduit de cette expérience, mais souligne qu'il n'y a mystère
considérable dans pourquoi l'effet d'un petit espace, ce qui devrait
certainement pas entraîner beaucoup flux de fuite dans la région de gap, a
néanmoins un impact considérable dans l'apparition de ce que doit être une
fuite importante compte tenu de l'écart d'énergie. Inexia n'envisageait pas qu'énergie avait
reçu à partir du système de champ du point zéro et donc il a quitté la question
avec l'instruction qu'il était pratiquement impossible de prévoir les flux de
fuite par calcul.
Il savait, bien sûr, de
structure de domaines magnétiques et son argument était que le problème de flux
de fuite était lié à ce qu'il appelle une " lacet " action du flux
qui passe autour du circuit magnétique. Normalement, pourvu que le niveau de
polarisation est au-dessous du genou de la courbe de B-H, qui se produit à
environ 70 % de saturation dans les noyaux de fer de la composition générale de
cristal, requiere très peu magnétisantes champ changer la densité de flux
magnétique. Cela suppose que tout est fait pour éviter
les trous d'air. Cette action consiste à
mouvements de mur de domaine afin que les États magnétiques des domaines
adjacents à axes différents cristaux de magnétisation facile et cela implique
très peu de changement énergétique.
Cependant, si il y a un vide d'air dans le
circuit de flux et le bobinage magnétisant n'est pas assis sur cette lame
d'air, le noyau de fer elle-même doit être le siège d'une source de champ
progressif reliant l'enroulement et l'écart.
Il peut seulement servir dans ce sens par les lignes de champ dans les
domaines obligés de tourner quelque peu des axes faciles préférés de
magnétisation, avec l'aide des surfaces autour du noyau de tout limite. Cette action signifie que, par la force, et
consécutivement à l'existence de l'entrefer, le flux doit se faire à travers le
noyau de cette action " lacet ".
Cela signifie qu'il faut énormément d'énergie pour forcer la mise en place
de ces champs dans le noyau de fer. Plus
important, toutefois, du point de vue de cette invention, cela signifie que les
effets de polarisation magnétique intrinsèque dans les domaines magnétiques
adjacents dans le cessez de fer d'être mutuellement parallèle ou orthogonales
afin de rester dirigée le long des axes de magnétisation facile. Alors, en effet, l'action magnétisantes est
non seulement celui de l'enroulement magnétisantes enroulé autour du noyau,
mais devient aussi celle de polarisation ferromagnétique adjacente, que ces
derniers agissent de concert comme vide-énergie alimentés solénoïdes et sont
déviés dans l'autre pour développer les forces additionnelles de magnétomotrice
vers l'avant.
Les conséquences sont
que la source d'alimentation ferromagnétique intrinsèque avec son action de
commande thermodynamique contribue à faire des travaux dans le renforcement des
forces à travers l'entrefer. La tâche,
en termes de technologie, est alors d'exploiter cette énergie que l'écart est
fermé, comme par les polonais qui se réunissent dans un moteur d'hésitation et
éviter de retourner cette énergie comme les pôles distincts, ce qui est possible
si la contrôle source de magnétisation primaire est bien supprimée de l'écart
de la pole et la démagnétisation se produit lorsque les pôles sont à la
position la plus proche.
Cette situation de
l'énergie est évidente dans les données d'Inexia, parce que la tension
constante implique une amplitude de flux constant dans l'entrefer si il n'y a
aucune fuite de flux dans la région de gap.
Une amplitude de flux constant implique une force constante entre les
pôles et la largeur de la fente à l'égard de cette force est donc une mesure du
potentiel énergie mécanique de l'entrefer.
L'évaluation de puissance voltampère réactif au cours de la période de
quart-cycle qui représente que la demande de polarisation peut alors être
comparée avec l'énergie mécanique ainsi mis à disposition. Comme nous l'avons déjà dit, c'est comment Moullin déduit de la courbe
théorique actuelle. En fait, comme le montrent ses données, il lui fallait
moins de courant que l'énergie mécanique suggéré et alors qu'il avait dans son
témoignage de l'expérience de la source d'énergie du vide qui passé inaperçu et
qui se révèle seulement maintenant dans des machines qui peuvent servir à nos
besoins en énergie.
Dans la recherche ayant abouti à cette
demande de brevet le Moullin expérience a été répétée pour vérifier une
condition où un seul par polarisation enroulement sert trois intervalles
d'air. La configuration de test Moullin
est montrée dans la Fig.2, mais en répétant l'expérience dans la
recherche ayant abouti à cette invention, un chercheur a été monté sur le pont
militaire et cela a été utilisé pour comparer le rapport entre la tension
appliquée à l'enroulement magnétise et celle induite dans l'enroulement de la
recherche.
La fonctionnalité de
chute même à la demande actuelle a été observée, et il y avait des preuves
évidentes d'importants surplus d'énergie dans l'entrefer. Cela s'ajoute l'énergie inductive qui devait
nécessairement être enfermé dans le noyau magnétique pour soutenir l'action "
lacet " du flux magnétique déjà mentionné.
Il est par conséquent
souligner que, dans l'amorçage de l'action " lacet " flux, énergie
est emmagasinée inductif dans le noyau magnétique, même si cela a été jugé à
l'énergie du flux de fuite en dehors du noyau.
L'énergie de vide d'air est aussi énergie induction. Les deux énergies sont retournés à la source
de bobinage lorsque le système se démagnétise, étant donné un espace d'air
fixe.
Si, toutefois,
l'intervalle d'air se ferme après ou pendant la magnétisation, une grande
partie de cette énergie inductive va dans la sortie de travail mécanique. Notez
alors que l'énergie libérée comme travail mécanique n'est pas juste que stockés
dans l'entrefer mais est que stocké dans le maintien de " lacet
". Ici, puis est a raison de
s'attendre à une encore plus forte contribution à la performance de la machine
dynamique, qui ne fut pas adoptée par le calcul de la situation d'équilibre.
Compte tenu de
l'explication ci-dessus de la source d'énergie, les caractéristiques
structurelles qui font l'objet de cette invention seront maintenant décrit.
L'action " lacet
" est représentée dans la Fig.3, qui illustre comment le flux
magnétique navigue un virage à angle droit sur un noyau magnétique sur le
passage à travers un vide d'air. Par
simplification exagérée, on suppose que le noyau a une structure cristalline
qui possède un axe privilégié de la magnétisation sur la voie de la ligne
discontinue. Avec aucun espace d'air, le
courant nécessaire par un enroulement magnétisantes seulement doit fournir
suffisamment de force magnétomotrice pour surmonter les effets des inclusions
non magnétique et impuretés dans la substance de base et la perméabilité
magnétique très élevée peuvent s'appliquer.
Toutefois, dès que la lame d'air se développe, cette substance de base
doit trouver un moyen de mettre sur pied la force magnétomotrice dans les
régions qui s'étend loin de la localité de l'enroulement de magnétisation. Il ne peut pas faire cela à moins que son
effet est tellement puissant que le flux magnétique dans le circuit magnétique
à travers la substance de base est partout dévié de l'alignement avec un axe
privilégié facile de magnétisation. Donc
les vecteurs flux représentés par les flèches déplacent hors de l'alignement
avec la ligne brisée indiquée.
Il y a un effet "
boule de neige " progresse tout le pourtour de la base du siège de par la
polarisation et sinueuse, comme il a déjà déclaré, il exploite la puissance de
ferromagnétique intrinsèque qui, dans un système avec sans brise, seulement
pourrait être affectée par la magnétisation au-dessus du genou de la courbe de
B-H. Rotation du flux magnétique se
retrouve au-dessus de ce genou, alors que dans un centre idéal le magnétisme se
développe une gamme jusqu'à ce genou à très forte perméabilité, car elle a
besoin de très peu d'énergie pour déplacer un mur de domaines magnétiques sur
le côté et promouvoir une 900 ou a 1800 flux inversion. En effet, on peut avoir une perméabilité
magnétique de 10 000 sous le genou et 100 au-dessus du genou, le dernier
réduisant progressivement jusqu'à ce que la substance acides gras saturés
magnétiquement.

Dans la situation
représentée dans la Fig.2 et Fig.3 développée par les
enroulements magnétisantes 1 sur noyau magnétique 2 l'intensité
de champ doit être plus élevé, le plus élevé l'entrefer, afin d'obtenir la même
quantité de magnétisation mesurée par la tension induite dans un enroulement
(non illustré) sur le membre relais 3.
Toutefois, en vertu de cette lame d'air il y a potentiel pour exploiter
l'énergie fournie à cette lame d'air par le champ intrinsèque de point zéro qui
représente la perméabilité magnétique étant sur l'unité et ici, on peut
contempler très important excès d'énergie potentielle, compte tenu de
l'incorporation dans une conception de la machine qui s'écarte de la
convention.
Un des déposants a
construit une machine de test conjoint qui est configurée comme représenté
schématiquement à la Fig.4. La
machine a été prouvée pour offrir une puissance nettement plus mécanique sortie
qu'est fourni comme entrée électrique, comme un rapport de 7:1 en une seule
version et il peut agir refroidi pour produire de l'énergie électrique.
Ce qui est montré à la Fig.4
est un modèle simple visant à démontrer le principe de fonctionnement. Il
compose d'un rotor dans lequel quatre aimants permanents 4 sont
disposées aux quatre pôles de forme. Les
aimants sont collés en quatre secteurs d'un disque non magnétique 5 à
l'aide d'un remplissage de mousse de polyuréthane à haute densité et le disque
composite est ensuite assemblé sur un axe en laiton 6 entre un couplage
de bride de split. Non illustré dans la
figure, la structure tient la tige verticale dans les roulements ou l'étoile
roue de commutateur fixé sur l'arbre supérieur de la broche.
Notez que les aimants
présentent des pôles Nord au périmètre du disque du rotor et que le pôle sud
est maintenues ensemble par étant fermement mis dans le matériel de
collage. Une série de quatre stator
pôles ont été formés à l'aide de noyaux magnétiques de relais
électromagnétiques standards sont ont été positionnés autour du disque rotor
comme indiqué. Les enroulements
magnétisantes 7 sur ces carottes figurent à être connectés en série et
alimentés par le biais de contacts commutateur 8 par une alimentation
CC. Deux autres cœurs de stator forment
par des relais électromagnétiques similaires composants sont représentés par
leurs enroulements 9 dans les positions intermédiaires angle illustrés
et ceux-ci sont connectés en série et connectés à un redresseur 10 comblé
par un condensateur 11.
L'arbre de rotor 6
est couplé avec un entraînement mécanique (non illustré) quels harnais le
couple développé par le moteur ainsi formé et sert de moyen pour mesurer la
sortie puissance mécanique délivrée par la machine. Dans cette opération, en supposant que les
pôles du rotor ont lieu initialement au large de Registre, avec les pôles de
stator correspondant et la cale est ensuite libérée, l'action d'un fort champ
magnétique des aimants permanents tournera le rotor pour amener les pôles de
stator et le rotor dans le registre. Un
aimant permanent a une forte attirance pour le fer doux et si cette impulsion
initiale de rotation est alimentée par l'énergie potentielle des aimants.
Maintenant, avec le
rotor agissant comme une inertie du volant moteur et avoir il aura tendance à
trop tirer sur le pôle en registre du poste et qui impliquera une attraction
inversée de sorte que le rotor oscillera jusqu'en atténuant l'action apporte se
reposer. Toutefois, si les contacts de l'interrupteur
de commutation sont fermés comme les polonais viennent d'abord dans le
registre, les enroulements magnétisantes 7 reçoit une impulsion de
courant qui, en supposant que l'enroulement sont connectés dans le bon sens,
tend à démagnétiser les quatre noyaux statoriques. Cela signifie que, comme les pôles du stator
et du rotor distincts, l'attraction inverse par les aimants est éliminée. En effet, si les démagnétisation impulsions
de courant fournies à l'enroulement 4 sont assez fortes, les pôles de
stator peuvent inverser la polarité et qui se traduit par une répulsion qui
donne la marche avant vers les pôles du rotor séparable. Le résultat net de cette action est que le
rotor va continuer à tourner jusqu'à ce qu'il franchisse la position angulaire
de point mort qui permet le rotor à être attirés vers l'avant par les stator
pôles 90-degrés avant.
L'interrupteur de
commutation 8 ne doit être fermée pour une période limitée de
déplacement angulaire suivant la point mort supérieur en registre position des
pôles du stator et du rotor. La
puissance fournie par le biais que commutateur de ces impulsions provoquera le
rotor pour continuer à tourner et on réalisera des vitesses élevées comme la
machine développe sa motricité complète.
Sur une telle machine,
les tests ont montré que plus mécanique de puissance peut être livré qu'est
alimenté électriquement par la source qui alimente l'action par l'intermédiaire
de l'interrupteur de commutation. La
raison à cela est que, alors que l'énergie dans l'interstice entre les pôles du
rotor et le stator qui est prélevée mécaniquement que les polonais viennent
dans le registre est fournie par la puissance intrinsèque de la
ferromagnétique, une démagnétisation bobinage part le cœur du système couplé à
travers cet entrefer doit très peu d'énergie pour éliminer la force mécanique,
agissant à travers cet espace d'air.
Imagine tel un enroulement sur le membre de pontage sur la Fig.2. L'action du courant dans celle d'enroulement, qui enfourche le flux
" lacet " dans ce pontage des membres bien retiré de l'action de la
source des enroulements magnétisantes 1, est placé pour être extrêmement
efficaces pour s'opposer à l'influence magnétisantes communiquée à
distance. Par conséquent, très
peu d'énergie est nécessaire pour surmonter le couplage magnétique transmis par
le biais de l'entrefer.
Bien que l'inductance
mutuelle entre deux enroulements magnétisantes espacés-apart a une action
réciproque, peu importe quel enroulement primaire et qui est secondaire,
l'action dans la situation de machine particulière décrite implique la
contribution " solénoïdale " représentée par l'action de flux
ferromagnétiques " lacet ". Ce
dernier n'est pas réciproque dans la mesure où le flux " lacet "
dépend de la géométrie du système. Un
enroulement flux diriger directement à travers un dispositif anti-siphon
magnétisant a une influence différente sur l'action dans le noyau
ferromagnétique d'un dirigeant flux latéral à l'intervalle d'air et il n'y a
aucune réciprocité dans cette action.
En tout état de cause,
les faits de l'expérience ne révèlent que, en raison d'un écart important dans
une telle interaction mutuelle, plus mécanique de puissance est alimenté dans
le rotor qu'est fourni comme entrée de la source électrique.
Cela a été démontré
plus loin en utilisant les deux enroulements de stator 9 à réagir dans
un sens générateur pour le passage des pôles du rotor. Une impulsion électrique est induite dans
chaque enroulement par le passage d'un pôle de rotor, et il est alimenté par
l'inertie du disque rotor 5. En connectant l'énergie ainsi produite, pour
charger le condensateur 11, le bloc d'alimentation CC peut être augmenté
pour optimiser l'efficacité encore plus loin.
En effet, la machine
est en mesure de démontrer que la livraison de dépassement de puissance du
système en vertu de la génération électrique, charge d'une batterie plus
rapidement qu'une batterie d'alimentation ferromagnétique est déchargée. Cette invention concerne une réalisation
pratique des principes moteurs-générateurs vient d'être décrite et vise, dans
son aspect préféré, à fournir une machine robuste et fiable, dans lequel les
contraintes de la dent dans les pôles du rotor, qui fluctuent souligne
communication couple réticence forte, ne sont pas absorbés par un aimant
permanent en céramique susceptible de rupture en raison de sa composition
fragile.
Un autre objet est de
fournir une structure qui peut être démantelée et remontée facilement pour
remplacer les aimants permanents, mais un objet encore plus important est celui
de réduire au minimum les oscillations de flux de fuite parasite de puissants
aimants permanent. Leur rotation dans le
dispositif représenté à la Fig.4 ferait excessive induction de courants
de Foucault en métal à proximité, y compris celle de la machine elle-même, et
ces effets sont réduits au minimum si les changements de flux sont confinés aux
chemins d'accès par le biais de tôles en acier et si le flux de la source de
l'aimant a une symétrie ou près de symétrie autour de l'axe de rotation.
Ainsi, la conception
idéale avec cela à l'esprit est l'un où l'aimant permanent est un cylindre
creux situé sur un axe de rotor non magnétique, mais, bien que cette structure
soit dans le cadre de cette invention, la machine décrite utiliseront plusieurs
aimants permanents séparés, se rapprochant, en fonction, une telle
configuration cylindrique. Se référant à
la Fig.4, on peut encore noter que le flux magnétique qui sortent d'un
des pôles du Nord devra trouver son chemin le long des chemins de fuite au
travers de l'air à réintégrer le pôle Sud.
Pendant chaque cycle de fonctionnement de la machine le flux est attiré
par les noyaux statoriques, mais le passage de l'air est essentiel et donc le
pouvoir des aimants n'est pas utilisé au maximum et il y a ces effets non
désirés des courants de Foucault.
Pour surmonter ce
problème, l'invention porte sur deux sections distinctes du rotor et les pôles
de stator devient membres relais, permettant le flux des aimants pour trouver
un passage autour d'un circuit magnétique avec minimiser les fuites par air comme
le flux est dirigé par un ou des autres paires de trous d'air où l'action du
couple est développée avec une conception optimale.
Maintenant, on se
reportera à la Fig.5 et la séquence des positions de rotor montré. Notez
que la largeur du pôle stator peut être beaucoup plus petite que que les pôles
du rotor. En effet, pour un
fonctionnement en utilisant les principes de cette invention, il est avantageux
pour le stator d'avoir une beaucoup plus petite largeur de mât afin de
concentrer la région du pôle efficace.
Une largeur de pôle du stator de moitié que du rotor est appropriée,
mais il peut être encore plus faible et cela a l'avantage secondaire de
nécessiter des enroulements plus petits magnétisantes et ainsi économiser sur
la perte associée à du circuit actuel.
Le stator comporte huit
pièces polaires formés en tant que membres ponts 12, plus clairement
représentées dans la Fig.7, ce qui montre une vue sectionnelle latérale
par le biais de deux sections de rotor 13 axialement espacées sur un arbre
de rotor 14. Il y a quatre
aimants permanents 15 positionné entre ces sections de rotor et situé
dans 16 des ouvertures dans un disque 17 d'une substance non
magnétiques de haute résistance à la traction, ce dernier étant illustré à la Fig.6. Les sections de rotor sont formées à partir
de lamelles de disque d'acier électrique, qui a sept grandes dents, les pôles
saillants. Enroulements magnétisantes 18
montés sur les membres relais 12 constituent le système régissant
l'action du moteur-générateur étant qualifié.
Les circuits de commande ne sont pas décrit comme conception de tels
circuits implique ayant des compétences possédées par les acteurs de l'art de
l'ingénierie électrique.
Il suffit, par
conséquent, pour décrire les mérites de la configuration de la conception
structurale des éléments fondamentaux de la machine. Ces concernent principalement l'action
magnétique et, comme on peut imaginer de Fig.7, le flux magnétique de
l'aimant entre les lamelles du rotor en traversant les faces planes des lamelles
et être dévié dans le plan de des lamelles de traverser un ou l'autre des pôle
stator pontage des membres, retour par une route semblable à travers l'autre
rotor.
À l'aide de huit pôles
de stator et sept pôles de rotor, le dernier ayant une largeur de pole égale à
la moitié du pôle pitch dans un sens angulaire, on voit de la Fig.5,
qu'il y a toujours un passage de flux à travers l'entrefer petit entre les
pôles du stator et du rotor. Cependant,
comme une combinaison de pôle est en registre les combinaisons de pôle
diamétralement opposées sont hors de Registre.
Tel que décrit par
référence à la Fig.4 le fonctionnement de la machine implique permettant
l'aimant tirer les pôles de stator et le rotor dans le registre, puis, comme
ils distinct, l'enroulement sur le membre de stator pertinentes à démagnétiser
ce membre des impulsions. Dans le
système de la Fig.4, tous les enroulements magnétisantes du stator
étaient pulsés ensemble, qui n'est pas une façon optimale de conduire une
machine multipolaire.
Dans la machine ayant
la structure de la pole avec un moins pôle de rotor à stator pôles (ou un
dessin ou modèle équivalent dans lequel il y a un moins pôle stator à pôles
rotor), cette action " pulsé " peut être distribuée dans sa demande
sur l'alimentation, et bien que cela rend la commutation interrupteur circuit
plus cher que le coût l'emporte sur l'avantage qui en résulte. Cependant, il y a une caractéristique de
cette invention par lequel ce problème peut être atténué, voire éliminé.
Supposons que le rotor
a la position indiquée en Fig.5(a) avec la R1 pôle dénotée de
rotor à mi-chemin entre S1 et S2, pôles de stator et imaginez que c'est
attiré vers la position en registre avec pôle stator S2. En atteignant cette position en registre,
comme indiqué dans Fig.5(c), supposons que l'enroulement des pôles de
stator que S2 est excitée par une impulsion de courant qui est maintenue
jusqu'à ce que le rotor par polarisation atteint la position de Fig.5(e).
La combinaison de ces
deux actions est ont imprimé une impulsion de commande vers l'avant actionnée
par l'aimant permanent dans la structure du rotor et l'impulsion de courant qui
supprime l'action de freinage sera ont élaboré une plus petite quantité
d'énergie de la source d'énergie électrique qu'il fournit. C'est le même processus a été décrit par
référence à la Fig.4.
Cependant, considérons maintenant les
événements qui se produisent dans l'action du rotor diamétralement opposée à
L'action complémentaire
des deux enroulements magnétisantes pendant la fermeture du pôle et la
séparation du pôle permet la construction d'une machine qui, étant donné que
l'énergie du point zéro vide alimentant le ferromagnétique se nourrit de la
puissance d'entrée, se déroulera sur cette source d'énergie et ainsi refroidir
le système des missions autonomes.
Il y a différentes
options de conception pour mettre en œuvre ce qui a simplement été
proposé. Beaucoup dépend de
l'utilisation prévue de la machine.
Lorsqu'il s'agit de livrer une puissance mécanique l'action
régénératrice de puissance électrique peut tous servir à alimenter la
démagnétisation avec tout excédent contribuant à un couple plus fort en
inversant la polarité des pôles du stator pendant la séparation du pôle.
Si l'objet est de
produire de l'électricité en agissant en tant qu'on pourrait concevoir une
machine ayant des enroulements supplémentaires sur le stator pour fournir du
courant électrique. Cependant, il semble
préférable de considérer la machine comme un moteur et de maximiser son
efficacité en cette qualité, tout en utilisant un couplage mécanique à un
alternateur de conception classique pour la fonction de génération de courant
électrique.
Dans ce dernier cas, il
semble toujours préférable d'utiliser la fonctionnalité d'individu-excitation
déjà décrite pour réduire les problèmes de commutation de commutation.
La question de qui
prévoit la mise en marche peut être traitée à l'aide d'un moteur de démarreur
distinct alimenté par une alimentation externe ou en prévoyant de limiter
" pulsé " actuel, disons, deux pôles de stator. Ainsi, par exemple, avec la configuration de
pôles de huit stator, les enroulements magnétisantes interconnecté pourraient
être limitées à trois paires de stator, avec deux enroulements magnétisantes du
stator, laissés libres pour la connexion à une source d'alimentation externe
pulsé.
Si la fonctionnalité de
ce dernier n'étaient pas tenus, les enroulements de stator magnétisantes
seraient tous être connectés en paires sur un véritable diamétralement opposé
de base. Fig.8 montre ainsi une configuration de rotor-stator ayant six pôles de stator
interagissant avec sept pôles de rotor et magnétise enroulements statoriques,
reliés entre eux par paires.
L'invention, par
conséquent, offre un large éventail de possibilités de mise en œuvre, qui, à la
lumière de cette divulgation deviendra évident pour les personnes versées dans
l'art de génie électrique, tous basés, mais sur le principe essentiel mais
simple qu'un rotor possède un ensemble de pôles de polarité commune qui sont
attirés dans le registre avec un ensemble de pôles de stator qui sont
supprimées ou polarité renversée magnétiquement à séparation de pôle. L'invention, cependant, offre également la
caractéristique importante de la commutation minimisant et fournissant
davantage pour une fermeture de flux magnétique qui réduit le flux de fuite et
les fluctuations des flux de fuite et donc contribue à l'efficacité et de
rendement élevé de couple ainsi que de durabilité et de fiabilité d'une machine
incorporant l'invention.
Il est noté que, bien
qu'une machine qui utilise deux sections de rotor a été décrit, il est possible
de construire une version composite de la machine ayant plusieurs sections de
rotor. Dans l'éventualité que l'invention
trouve à utiliser dans les très grandes machines de moteur-générateur le
problème de fournir de très gros aimants peut être surmonté par une conception
dans laquelle sont assemblés les nombreux petits aimants. Le concept structurel décrit par référence à
la Fig.6 en fournissant le repérage des orifices pour abriter les
aimants rend cette proposition très faisable.
En outre, il est possible de remplacer les aimants par un cylindre en
acier et fournir un solénoïde dans le cadre de la structure du stator et situé
entre les sections de rotor. Cela
mettrait en place un champ magnétique axial par polarisation le cylindre en
acier et donc polarisant le rotor.
Toutefois, l'alimentation fournie à que le solénoïde n'altérerait la
puissance générée et donc une telle machine ne serait pas aussi efficace que
l'utilisation d'aimants permanents, ceux qui sont maintenant disponibles.
Néanmoins, doit on voir
des progrès significatifs dans le développement de matériaux chauds
supraconducteur, il devient possible d'exploiter les autoproducteurs
caractéristiques moteur-générateur de l'invention, avec ses propriétés de
refroidissement autonome, en service de l'appareil dans un boîtier à basse
température et en remplaçant les aimants par un solénoïde supraconducteur stator
pris en charge.
WILLIAM BARBAT:
AUTOSUFFISANTES GENERATEUR
Brevet demande US 2007/0007844 A1 11 janvier 2007 Inventeur: William N. Barbat
FINANCIÈREMENT
AUTONOME ÉLECTRIQUE GÉNÉRATEUR UTILISANT ÉLECTRONS
FAIBLE MASSE
INERTIELLE À AMPLIFIER L'ÉNERGIE INDUCTIVE
Cette demande de brevet montre un générateur
électrique très soigné, auto-alimenté avec une production théorique de quoi que
ce soit jusqu'à un COP de 59 lors de l'utilisation de séléniure de
cadmium. La discussion des aspects
théoriques de la conception inclut un grand nombre d'informations historiques
et couvre l'origine de la " Loi " des économies d'énergie qui, en
dépit d'être incorrect, depuis des décennies, un obstacle majeur au
développement scientifique des dispositifs d'énergie libre.
RÉSUMÉ
Oscillations électriques dans un métalliques "
d'envoi bobine " rayonnent inductives photons vers l'un ou plus "
énergie-loupe bobines " comprenant un photoconducteur ou dopé
semiconductor revêtement un conducteur métallique ou comprenant d'un
supraconducteur. Électrons de faible
masse d'inertie dans les serpentins énergie-loupe reçoivent de la bobine
émettrice, une force transversale n'ayant aucune limitation de force en ligne,
qui exonère de cette force de l'état de conservation de l'énergie. Les électrons de faible masse dans
l'énergie-loupe serpentins recevront accélération accrue proportionnelle à
électron normale masse divisée par la masse moindre. Secondairement rayonnée inductif-photon
énergie est amplifiée proportionnellement à une plus grande accélération des
électrons, au carré, par exemple, le facteur inductif-énergie-agrandissement
des photoélectrons CdSe 0,13 x normal électron la masse est 59 fois. Agrandie inductif-photon énergétique de
l'énergie-loupe serpentins induit oscillant d'énergie électrique en une ou
plusieurs métallisé " serpentins de sortie ". La production d'énergie électrique est
supérieure à l'apport énergétique si plus de l'énergie de l'induction de photon
agrandie est dirigée vers la serpentins de sortie qu'est réalisé comme une
force de compteur à la bobine émettrice.
Après que qu'une source d'énergie externe initialisé les oscillations,
la rétroaction de l'énergie excédentaire générée rend l'appareil un générateur
autonome d'énergie électrique à des fins utiles.
RENVOI À LA DEMANDE
CONNEXE
Cette demande correspond
à et réclame le bénéfice moins de 35 U.S.C. 119 (e), du U.S. application
provisoire n° 60/697 729, déposée le 8 juillet 2005, intégrées aux présentes
par référence dans son intégralité.
CHAMP
Cette communication présente un domaine technique
dans lequel pratique énergie électrique est créé conformément à l'exception vis
à vis de l'état de conservation de l'énergie que Herman von Helmholtz décrit
dans sa doctrine de 1847 sur la conservation de l'énergie: " Si...
organismes possèdent des forces qui dépendent de temps et de la vitesse, ou qui
agissent dans des directions autres que les lignes qui unissent chaque paire de
points matériels,... puis les combinaisons de ces organismes sont possible dans
lequel force peut-être être perdu ou gagné comme infinitum ". Une force transversale inductive se qualifie
pour la règle ad infinitum de Helmholtz, mais cette force n'est pas suffisante
en soi pour causer un plus grand rendement énergétique qu'entrée lorsqu'elle
est appliquée aux électrons de la masse normale en raison de leur rapport masse
sur charge unique. Toutefois, l'accélération accrue des électrons de conduction
de l'inférieur puis normale inertie de masse, comme cela se produit dans
photoconducteurs, semi-conducteurs dopés et supraconducteurs, est
proportionnelle à l'électron normale masse divisée par la masse de l'électron
faible et le grossissement de domestiquer énergétique inductive est
proportionnelle au carré de la plus grande accélération relative.
FOND
Force magnétique satisfait également exemption de
Helmholtz à l'état de conservation de l'énergie, parce que la force magnétique
est transversale à la force qui l'oblige, et force magnétique est déterminée
par la vitesse " relative " (c'est-à-dire perpendiculaire à la ligne
de connexion) entre les charges électriques. Grossissement de force magnétique
et de l'énergie a été démontré par E. Leimer (1915) dans la bobine d'un haut
parleur et la bobine d'un galvanomètre lorsqu'il irradié un fil d'antenne-radio
avec le radium. Un milligramme de,
source de radium linéaire 10 produit une augmentation de 2,6 fois
mesurée en courant électrique dans le fil d'antenne en comparant la réception
radio inaudible sans radium à la réception sonore avec le radium. Il s'agissait d'un 2,6 x 2,6 = 7 fois
augmentent en énergie électrique qui traverse les bobines de fil
respectifs. La possibilité de cette
réception améliorée étant attribuée à une personne détenant l'unité du radium
au fil a été éliminée par observation supplémentaire de Leimer, que chaque fois
que l'orientation de l'unité de petite radium a été changée à environ 30 degrés
par rapport à la fil, l'amélioration de l'énergie a cessé.
Demandeur a déduit que le grossissement énergie de
Leimer était très probablement due à des électrons de faible masse qui ont été
libérés et conductrice dans l'antenne de rayonnement alpha, ce qui a permis ces
électrons spéciales à donner une plus grande que l'accélération normale par les
photons de diffusion radio reçus.
Demandeur a également déduit que ces électrons de faible masse doivent
provenir d'une couche minces d'oxyde de cuivre (CuO) sur le fil d'antenne. CuO est un composé semi-conducteur
polycristallin noir mat qui se développe in situ sur fil de cuivre et de bronze
dans le cadre de recuit le fil en présence d'air. Ces revêtements de CuO ont été observées par
le demandeur sur fil de laboratoire historique au Musée des sciences à Oxford
University, au Royaume-Uni et sur fil de cuivre maison de cette époque aux
États-Unis, indiquant que les revêtements de CuO étaient monnaie courante. Des années plus tard, recuit a pris place dans des conditions qui
empêchent la plupart oxydation. Elle est
suivie par traitement à l'acide pour enlever les oxydes restants, laissant fil
brillant.
La même année la traduction anglaise du livre de Leimer paru dans le
Scientific American, Alfred M. Hubbard, 16 ans, de Seattle (Washington), aurait
inventé un générateur carburant moins, dont il a admis plus tard, employé radium. Requérante interprète cette chaîne comme
impliquant qu'énergie-grossissement de Leimer a été utilisé par Hubbard avec la
rétroaction pour le rendre financièrement autonome. Trois ans plus tard, Hubbard a démontré
publiquement un générateur carburant moins relativement avancé qui allume une
ampoule à incandescence de 20 watts (1919 a anonyme). Professeur de physique de bonne réputation de
l'Université de Seattle, qui était intimement familier avec dispositif de
Hubbard (mais pas en liberté à divulguer les détails de sa construction),
garant de l'intégrité du générateur carburant moins et déclaré qu'il n'était
pas un périphérique de stockage, mais il ne savait pas pourquoi cela a
fonctionné (anonyme, 1919 b). Parce que
Hubbard n'avait au départ aucun moyen financier de la sienne, il est probable
que le professeur avait fourni que Hubbard avec l'utilisation du radium cher au
départ et ce qui a été témoin le processus inventer dans son propre
laboratoire.
Photos de journal (1920 a anonyme) d'une manifestation
plus impressionnante du générateur carburant moins de Hubbard, montrent un
dispositif qualifié de 14 pouces (36 cm) de long et de 11 pouces (28 cm) de
diamètre, relié par quatre lourds câbles électriques d'une puissance de 35 HP
(26 kW) moteur électrique. Le moteur
aurait été propulsé une embarcation ouverte de 18 pieds autour un ressemblant à
une vitesse de 8 à 10 nœuds (anonyme: 1920 b).
L'événement a été assisté par un journaliste prudent qui prétend avoir
vérifié soigneusement pour tout fils qui pourraient ont été connectés aux
batteries cachées, en soulevant l'appareil et le moteur du bateau. Énergie de radioactivité peut être éliminé
comme source d'alimentation principale, parce que le radium environ 108 fois
plus que l'approvisionnement du monde entier aurait été nécessaire à l'égalité
de Hubbard a signalé l'énergie électrique de sortie de 330 ampères et 124
volts.
Lester J. Hendershott de Pittsburgh, en
Pennsylvanie, aurait démontré un générateur de carburant-moins en 1928 qui a
été revendiqué par Hubbard d'être une copie de son propre dispositif (1928
h). Le Président de Stout Air Services, William B. Stout, qui a également
conçu l'avion Ford Trimotor, rapporté (1928b): " la manifestation a été
très impressionnante. C'était vraiment étrange... Le petit modèle semblait
fonctionner exactement comme Hendershot expliqué que c'était le cas ".
Auraient également été attestant de l'opérabilité du générateur fuelless de
Hendershott étaient le Colonel Charles A. Lindbergh et le Major Thomas Lanphier
de l'US Air Corps (1928a, et suiv.), et troupes de Lanphier assemblé aurait été
un modèle de travail de son appareil.
À connaissance du demandeur, la seule
représentation qui a été rendue publique des composants intérieurs de le
quelconque de ces générateurs déclarés se compose d'un dessin Sommaire (Bermann
1928 h) des appareils de Hubbard même dimension que le dispositif montré dans
sa démonstration de 1919. Il représente
un ensemble complexe de bobines parallèles de 6 pouces (15 cm) de longueur et
de 4,5 pouces (11,4 cm) de diamètre hors tout.
Quatre pistes de fils isolés, avec l'isolation Pelée, apparaissent qui
sort de l'extrémité de l'appareil. Ce
que ces quatre fils étaient reliés à en interne n'a pas été démontré.
Description de Hubbard de la disposition interne des serpentins dans l'appareil
correspond généralement le dessin (Anon. 1920): " il est composé d'un
groupe de huit électro-aimants, chacun avec des enroulements primaires et
secondaires du fil de cuivre, qui sont disposées autour d'un gros noyau en
acier. De même, le noyau a un enroulement unique. Sur l'ensemble du groupe de
cellules est un enroulement secondaire ".
Rien a été signalé ou représenté sur le fonctionnement des composants
entre eux, ou combien radium a été utilisé et où le radium a été
positionné. Les seuls connecteurs
visibles sur le dessin ont été entre les enroulements externes des huit bobines
de l'électro-aimant. Ces connecteurs
montrent que le sens des enroulements alterne entre dans le sens horaire et
dans le sens antihoraire sur bobines adjacentes, afin que la polarité de chaque
électro-aimant aurait été contraire à celui de ses voisins adjacents.
Si les dispositifs de Hubbard et Hendershot effectivement exploité comme
indiqué, ils ont apparemment jamais atteint acceptation ou succès
commercial. En supposant que les
dispositifs de travail réellement effectuées, leur manque de réussite aurait pu
largement financièrement ou approvisionnement de, ou les deux, aggravée par le
scepticisme des croyants dans la doctrine de la conservation de l'énergie. Combien radium a été employé par Hubbard dans
son plus grand générateur peut seulement être deviné à, mais en supposant une
aiguille de radium de laboratoire typique contenant 10 milligrammes de radium a
été utilisée, ce montant aurait coûté $900 en 1920, passant à $500 en
1929. Que beaucoup de radium dans un
générateur fuelless aurait coûté autant qu'une automobile bon marchée dans les
années 1920. Peut-être beaucoup plus de
radium a été utilisé que 10 milligrammes.
En 1922, quand la compagnie de Radium de l'Amérique
de Pittsburgh, en Pennsylvanie, discontinué auraient été ses travaux avec
Hubbard sur son invention (1928 h), alimentation du monde entier de radium
était seulement environ 250 grammes.
Dans l'hypothèse extrême que seule 1 milligramme de radium était
nécessaire par générateur, moins de 10 % de la production d'une seule année
d'autos aux États-Unis dans le milieu des années 1920 pourrait ont été fournis
avec ces générateurs. Apparemment
Hendershott avait essayé de faire revivre la technologie en montrant que le
générateur fuelless pourrait élargir la gamme de vol air indéfiniment, mais sa
technologie jamais attiré un commanditaire de toute entité philanthropique ou
privé.
US Pat. No 4 835 433 à Brown, ressemble superficiellement à
l'élaboration du dispositif de Hubbard. Dispositif de
Brown semble avoir le même nombre et essentiellement la même disposition
générale des bobines de fil comme générateur de Hubbard, autant que peut se
comprendre de l'articles de journaux décrivant ce périphérique. Apparemment, aucune information relative aux dispositifs Hendershot ou
Hubbard n'était considérée pendant l'instruction de la '433 brevet. Brown explique la conversion de l'énergie des
produits de désintégration radioactive, principalement des émissions alpha, à
l'énergie électrique en amplifiant les oscillations électriques dans un haut-Q
L-C circuit irradié par des matières radioactives. " Au cours du processus d'absorption,
chaque particule alpha entreront en collision avec un ou plusieurs atomes dans
le conducteur, frapper les électrons de leur orbite et à transmettre une
énergie cinétique pour les électrons dans le conducteur, ce qui augmente sa
conductivité ". (Col. 3, ligne 68 à col. 4, ligne 5). Aucune réclamation n'a été effectuée par
Brown, que l'appareil employé un semi-conducteur ou photoconducteur qui aurait
pu fournir des électrons de faible masse pour un grossissement de l'énergie.
Brown a réclamé une sortie 23 a à 400 volts, qui
est largement supérieur à toute l'énergie de décomposition, représentée par son
contenu radioactif signalée de 1 milligramme de radium qui était entouré de
barres d'uranium radioactifs faiblement et poudre de thorium. Thorium sous tension étant fortement pyrophorique, il est généralement
scellé dans une atmosphère d'azote pour éviter une combustion spontanée. Dans son dispositif, Brown a aurait été
confiné le thorium en carton sans aucune mention de l'étanchéité à l'air. Cette condition aurait invité une crise qui
aurait pu être interprétée comme massive hors du contrôle production
électrique.
À la connaissance de la requérante, aucune personne
autre que le demandeur n'a jamais indiqué que la présence d'oxyde de cuivre sur
leurs fils aurait pu fournir un grossissement de l'énergie. Si effectivement, dispositif de Hubbard n'a
fonctionné, certaines caractéristiques de sa conception sont inexplicables par
la requérante, à savoir l'utilisation de quatre et non deux de gros câbles
électriques connecter son appareil à un moteur électrique et l'utilisation
d'une alternance de polarité au lieu de polarité unique-direction dans
l'orientation des bobines multiples entourant une bobine centrale. Requérante estime dès lors que la
spécification ci-dessus énonce des configurations originales des générateurs
d'énergie électrique qui n'ont aucun antécédent connu.
RÉSUMÉ
Pour répondre aux besoins pour les générateurs
électriques qui sont capables d'autoproduction des quantités substantielles
d'énergie électrique dans des environnements variés, et qui sont fixes mais
aussi portable, appareils et méthodes sont fournies pour magnifier une entrée
électrique et (avec commentaires) pour générer une énergie électrique
utilisable indéfiniment sans carburant ou autre source d'énergie externe, à
l'exception de démarrage. L'appareil
utilise des électrons de faible masse effective, qui reçoivent une plus grande
accélération que les électrons normales pour un montant qui est inversement
proportionnel à la masse effective.
Demandeur a déterminé que la masse effective est identique à vraie masse
inertielle de l'électron. L'énergie des
photons qui est rayonné quand un électron est accéléré est proportionnelle au
carré de l'accélération, donc l'augmentation de l'énergie des photons rayonnée
d'un électron accéléré de faible masse plus l'énergie d'un électron normal est
égale au carré inverse de la vigueur de la masse, par exemple le grossissement
d'énergie calculée fourni par photoconductrices électrons en séléniure de
cadmium, avec une masse effective de l'électron de 0,13, est de 59 fois. L'utilisation d'une force transversale, qui
n'a pas un arrière-force directe, afin d'accélérer les électrons de faible
masse de manière oscillatoire, soustrait à toute force égale et opposée qui
invoquerait l'application de la Loi de conservation de l'énergie cinétique et
thermodynamique.
Les différents modes de réalisation de l'appareil,
qui est configurés pour agrandir en permanence une entrée d'oscillation de
l'énergie électrique, ou pour servir un générateur électrique autonome, faire
appel à trois composantes principales :
Au moins une bobine émettrice
Bobine d'au moins une énergie-agrandissement, comprenant un MATERIAU qui
produit, dans un électrons de faible masse " condition ", et
Au moins une sortie bobine.
Il est souhaitable que l'appareil comprend
également un moyen d'établir la condition à l'égard de l'énergie-loupe
serpentins. Sauf indication contraire
dans le reste de ce texte, où le nombre de bobines d'un type particulier est
mentionné au singulier, on comprendra qu'une pluralité de bobines de type
respectif peut alternativement être imputée.
Oscillation électrique dans la bobine émettrice,
qui est composée d'un conducteur métallique, provoque des rayonnements de
photons inductives de la bobine émettrice.
La bobine de l'énergie-loupe est située dans une position par rapport à
la bobine émettrice afin de recevoir des photons inductives de la bobine
émettrice. Les photons inductives
rayonnant à partir des oscillations électriques dans la bobine émettrice,
transmettre une force transversale pour les électrons de faible masse dans le
serpentin de l'énergie-grossissement avec aucune force-dos sur la bobine
émettrice. Les accélérations de plus que
la normale qui sont produites dans les électrons de faible masse de la bobine d'énergie-loupe,
produisent plus d'énergie des photons inductives irradiation que la normale.
La bobine de sortie est positionnée de façon à
recevoir l'énergie de photon inductive agrandie de la spirale de
l'énergie-loupe. L'énergie de photons
inductive reçue par la bobine de sortie, qui est composée d'un conducteur
métallique, est converti en un courant électrique oscillant d'électrons
normaux. Afin que la puissance
électrique à dépasser l'entrée électrique, la bobine de sortie est située de
telle sorte qu'il ne reçoit plus l'énergie de photon inductive agrandie que
celle qui est dirigée contre l'envoi de bobine d'agir comme une force de
dos. Cet " effet de levier
énergétique " provoque l'énergie électrique de sortie de dépasser l'apport
d'énergie électrique.
A titre d'exemple, la bobine de l'énergie-loupe est
constituée par un matériau supraconducteur, dans laquelle la " condition
" est une température (par exemple une température cryogénique) au cours
de laquelle le matériau supraconducteur présente un comportement
supraconducteur caractérisé par la production d'électrons de faible masse.
À titre d'exemple une autre, la bobine de
l'énergie-loupe est constituée par un matériau photoconducteurs, dans laquelle
la " condition " est une situation dans laquelle le matériau
photoconductrice est éclairé par une longueur d'onde du rayonnement de photons
suffisante pour provoquer le matériau photoconductrice de la bobine
d'énergie-loupe pour produire les électrons de conduction ayant apparente
faible masse. Dans ce dernier exemple,
les moyens permettant d'établir la condition peuvent comporter un excitateur
photoconducteur (par exemple un ou plusieurs LEDs) situé et configuré pour
illuminer la matière photoconductrice de la bobine d'énergie-loupe avec la
longueur d'onde du rayonnement de photons.
À titre d'exemple une autre, la " condition
" est la présence d'un dopant particulière dans un semi-conducteur qui
fournit un électron de faible masse comme un porteur de charge. En outre, à titre d'exemple, la bobine énergie-loupe
peut comporter un élément semi-conducteur ou qui a été dopé avec un élément
particulier ou composé qui rend conductrice d'électrons de faible masse sans
illumination par rayonnement de photons autrement que par des photons ambiants.
Modes de réalisation différents appareils
comprennent différents numéros respectifs et les arrangements des principales
composantes. En outre, les divers modes
de réalisation peuvent comporter une ou plusieurs des circuits, électrificateurs,
de blindage et d'autres composants pour remplir l'objet de fournir une source
autonome d'énergie électrique à des fins utiles.
Sont également fournis, méthodes pour générer un courant
électrique. Dans un mode de réalisation
d'une telle méthode, une première Spire s'excite avec une oscillation
électrique suffisante pour provoquer la première spire à émettre des photons
inductives. Au moins certaines des
photons de la première bobine inductives rayonnées sont accueillies par une
deuxième bobine, appelée " l'énergie-loupe bobine ", comprenant un
MATERIAU qui produit des électrons de faible masse. Les photons reçus inductives répandre des
forces transversales respectives pour les électrons de faible masse qui causent
les électrons de faible masse à l'expérience des accélérations dans les
matériaux qui sont plus grandes que les accélérations qui seraient autrement
être vécues par les électrons libres normales, touchés par les forces
transversales.
Conduction des électrons accélérés dans la deuxième
bobine, faible masse provoque la deuxième bobine produire une force inductive
agrandie. L'équipe agrandie inductive
est reçu par une troisième bobine qui provoque la troisième bobine produire une
sortie électrique oscillante des électrons de conduction normale qui a plus
d'énergie que l'oscillation initiale.
Une partie de la production électrique oscillante est réalisée comme
retour de la spirale de la troisième à la bobine émettrice, afin de fournir
l'oscillation électrique à la bobine émettrice.
Cette partie du courant électrique oscillant dirigé vers la bobine
émettrice, préférence est suffisante pour causer la génération autonome de
photons inductives de la première Spire sans besoin de n'importe quelle source
d'énergie externe. L'excédent oscillant
électrique sortie du serpentin troisième peut être adressée à une boucle de
travail.
La méthode peut comprendre davantage l'étape du démarrage
de la mise sous tension de la bobine première date de mise en production de la
sortie électrique oscillante. Cette
étape " départ " peut comprendre momentanément exposant la première
spire à une force extérieure d'inductive oscillante ou par exemple, à une force
magnétique externe qui déclenche une impulsion électrique.
Les caractéristiques de ce qui précède et supplémentaires
et les avantages de l'invention sera plus évidentes de la description détaillée
suivante, qui se déroule en ce qui concerne les dessins annexés.
BRÈVE
DESCRIPTION DES DESSINS

Fig.1A est une vue en perspective représentant schématiquement une bobine
émettrice par rapport à une bobine d'énergie-grossissant tels que des photons
inductives de la bobine émettrice, se propagent sur la bobine de
l'énergie-loupe.
Fig.1B est un fin-vue schématique de la bobine émettrice et énergie-loupe
bobine de Fig.1A, illustrant encore rayonnement de photons inductives de
la bobine émettrice et les directions respectives des flux d'électrons dans les
bobines.

Fig.1C est un fin-vue schématique de la bobine émettrice et énergie-loupe
bobine de Fig. 1 a, outre illustrant la production de photons d'inductives
agrandies rayonnant intérieurement et extérieurement rayonnant de la spirale de
l'énergie-loupe.
Fig.2A est une vue en
perspective schématique montrant une bobine interne de sortie, coaxialement
imbriquée à l'intérieur de la bobine d'énergie-loupe pour permettre à
l'induction de la bobine interne de sortie de la bobine d'énergie-loupe, dans
lequel l'induction actuelle établie dans la bobine de sortie interne est
utilisée pour alimenter une charge branchée sur le serpentin interne sortie efficace.

Fig.2B est un fin-vue
schématique des bobines montré Fig.2A, illustrant encore la plus grande
quantité de rayonnement d'inductif-photon agrandie qui est reçu par la bobine
de sortie externe par rapport à la quantité moindre qui est orientée vers la
bobine émettrice d'agir comme un arrière-force.
Fig.3 est un
diagramme schématique électrique d'une réalisation représentatif d'un appareil
de production.

Fig.4 est un fin-vue schématique d'un mode de réalisation représentant,
comprenant une bobine émettrice disposée au centre, entourée par six bobines
énergie-loupe, chacune ayant et bobine axe sensiblement parallèle à l'axe de
l'envoi. Une bobine de sortie interne correspondante est coaxialement imbriquée à
l'intérieur de chaque bobine énergie-loupe et les bobines d'énergie-loupe sont
organisés afin de bien saisir l'essentiel des photons inductives rayonnant à
partir de la bobine émettrice.
Fig.5 est un fin-vue
schématique de l'incarnation de la figure 4, autre, y compris une bobine de
sortie externe situés coaxialement avec la bobine émettrice et configuré pour
entourer tous les six bobines énergie-loupe afin de bien saisir les photons
inductives rayonnant vers l'extérieur l'énergie-loupe de bobines. Également
représenté est la plus grande quantité de rayonnement d'inductif-photon
agrandie qui est reçu par les serpentins de production interne et la bobine de
sortie externe par rapport à la moindre quantité de rayonnement de photons
inductive orientés vers la bobine émettrice d'agir comme une force de dos. Également montré sont des panneaux de LEDs utilisés pour excitant les
bobines énergie-loupe pour devenir photoconducteurs.
Fig.6 est une vue en
perspective de l'incarnation de la Fig. 4 et Fig. 5 mais encore représentant
les connexions inter-bobines respectifs pour les bobines de sortie internes et
énergétiques-loupe, ainsi que les fils respectifs de bobine émettrice, bobines
de sortie interne et bobine de sortie externe.
Fig.7 est une vue de
tête représentant schématiquement exemplaires directions de flux de courant
dans la bobine émettrice, énergie-loupe bobines, bobines de sortie interne et
bobines de sortie extérieure, ainsi que dans les diverses connexions
inter-bobines de l'incarnation de la Fig.4.
Fig.8 est un fin-vue
schématique montrant une incarnation de la manière qui les connexions
inter-bobines peuvent être faites entre les spires adjacentes d'énergie-loupe.
Fig.9A est un
fin-vue schématique illustrant la configuration de la bobine de l'incarnation
dans laquelle une bobine émettrice et une bobine interne de sortie sont
imbriquées à l'intérieur d'une bobine d'énergie-loupe, qui à son tour est
imbriquée à l'intérieur d'une bobine de sortie extérieur. Un séparateur
métallique, ayant une forme parabolique substantiellement et située entre la
bobine émettrice et la bobine de sortie interne, reflète en partie l'autrement
inutilisée inductif-photon radiation afin d'optimiser le rayonnement efficace
reçue par la bobine de l'énergie-loupe. Aussi, la gaine métallique empêche la bobine
interne sortie de recevoir des rayonnements envoyés par la bobine émettrice.
Fig.9B est un fin-vue
schématique de la configuration de la bobine de Fig.9A, outre dépeignant
le séparateur métallique agissant comme un bouclier pour limiter le rayonnement
de dos-force atteignant la bobine émettrice tout en permettant à la bobine de
sortie interne recevoir une partie importante du rayonnement agrandie de la
spirale de l'énergie-loupe. Également
représenté est la plus grande quantité de rayonnement d'inductif-photon
agrandie qui est reçue par l'interne de bobine et la sortie externe
d'enroulement par rapport à la quantité moindre qui est reçue par la bobine
émettrice d'agir comme un arrière-force.
Fig10A est un fin-vue schématique illustrant la configuration
de la bobine d'un autre mode de réalisation qui est semblable à certains égards
à l'incarnation de la Fig.4, mais incluant aussi des carottes
ferromagnétiques respectifs à l'intérieur de la bobine émettrice et interne
sortie bobines. Également représenté est une gaine
métallique autour de l'ensemble de l'appareil.
Fig.10B est un fin-vue schématique d'une bobine émettrice
d'un autre mode de réalisation dans laquelle un manchon ferromagnétique est
disposé coaxialement autour de la bobine émettrice.
DESCRIPTION DÉTAILLÉE
Considérations techniques
générales
Comprendre comment les " énergie infinie
" est venu à tort être rejetée par la communauté scientifique, précise la
base de cette invention. La fonction
électrodynamique décrite dans les modes de réalisation décrits ci-dessous, est
conforme à la règle d'autres sources d'énergie de Helmholtz, qui stipule qu'une
force qui n'est pas conforme il est causale force " peut être perdu ou
gagné infini ". Cette règle a été
incluse dans " Uber die Erhaltung der Kraft ( sur la Conservation de la Force )” que
Hermann Helmholtz livré à la société physique de Berlin en 1847. Mais,
Helmholtz a cru à tort que " toutes les actions dans la nature sont
réductibles à des forces d'attraction et de répulsion, l'intensité des forces
uniquement selon les distances entre les points impliqués... donc il est
impossible d'obtenir une quantité illimitée de force capable de faire le
travail comme le résultat d'une combinaison quelconque des objets naturels
".
Helmholtz a refusé d'accepter l'idée que l'énergie
magnétique est admissible à l'infini État malgré le fait que la force
magnétique (1820) de Ampere sur conducteurs droites parallèles est évidemment
transversalement à la direction des courants électriques, plutôt que d'être en
ligne avec les courants. Il a omis de mentionner que la force magnétique dans
l'invention importante (1825) de l'ampère, l'électro-aimant solénoïdale, est
causée par les courants dans les boucles de ses bobines, qui sont transversales
à la direction de la force magnétique.
En outre, il a omis de mentionner qu'ampère considéré comme la force
magnétique d'un aimant permanent causé par minutes transversales circulaires
courants, qui sont maintenant reconnues comme des électrons qui tournent et
transversalement en orbite.
Helmholtz, qui a fait ses études comme médecin
militaire sans aucune étude formelle de la physique, s'appuie au contraire sur
une explication métaphysique obsolète de force magnétique: " attraction
magnétique peut être déduite complètement l'hypothèse des deux fluides qui
attirer ou repousser dans le rapport inverse du carré de leur distance...Il est
connu que les effets externes d'un aimant peuvent toujours être représentées
par une certaine distribution des fluides magnétiques sur sa surface
". Sans s'écarter de cette croyance
dans les fluides magnétiques, Helmholtz cité de Wilhelm Weber (1846) de même
mauvaises interprétations que magnétique et inductifs forces sont dirigées dans
le même ordre que celle entre les charges électriques mobiles qui provoquent
les forces.
Weber avait pensé qu'il pourrait unifier
coulombienne, des forces magnétiques et inductives dans un seul, simple
équation, mais conduit viciée terme magnétique-force de Weber à la conclusion
absurde qu'un courant constant dans un fil droit induit un courant électrique
constant dans un câble parallèle. En outre, une évolution actuelle n'induit
pas une force électromotrice en ligne avec le courant, sous forme d'équation de
Weber a montré. La force induite est
compensée au lieu de cela, qui devient plus apparent plus que deux bobines
imbriqués, coaxiales sont séparés. Ce
qui semble être une arrière-force d'opposition directement est en fait une
force induction réciproque.
Affirmation de Helmholtz que la somme totale de l'énergie
dans l'univers est un montant fixe qui est immuable en quantité depuis une
éternité à l'éternité a fait appel à ses jeunes amis. Mais, l'aîné de la société physique de Berlin
déclare en son papier " spéculation fantastique " et un " saut
dangereux dans très spéculative métaphysique ", donc elle a été rejetée
pour publication dans Annalen der Physik.
Plutôt que d'accepter ce rejet de manière constructive, Helmholtz a
trouvé une imprimante prête à l'aider auto-publier son travail. Helmholtz a
dirigé la publication avec une déclaration indiquant que son article a été lu
devant la société, mais il a retenu perfidement mention de son rejet pur et
simple. Lecteurs imprudents ont reçu
depuis la fausse impression que sa règle de conservation de l'énergie universelle
avait reçu approbation de la société plutôt que sa censure.
Helmholtz (1862, 1863) médiatisé son concept ainsi:
" nous avons été amenés vers le haut à une loi naturelle universelle,
qui... se déclare une propriété parfaitement générale et particulièrement
caractéristique des forces tout à fait naturelle et qui... doit être placée à
côté de la législation de l'invariabilité de masse et l'invariabilité des
éléments chimiques ". Helmholtz
(1881) a déclaré que toute force qui ne pas économiser de l'énergie serait
" en contradiction avec l'axiome de Newton, qui a établi l'égalité de
l'action et de réaction pour toutes les forces de la nature " (sic). Avec cette déformation trompeuse de principe
strictement mécanique de Newton, Helmholtz avait habilement réussi à faire la
navette le profond respect pour les lois de Newton à sa doctrine de non
scientifique. Par la suite, Helmholtz la grand-croix était conféré par les rois
de la Suède et l'Italie et le Président de la République Français, et il a été
accueilli par l'empereur allemand dans la noblesse du titre de " von
", ajouté à son nom. Ces prix
prestigieux fait sa doctrine pratiquement inattaquable dans la communauté
scientifique.
Principe de l'ampère d'attraction magnétique
transversale et de répulsion entre le courant électrique a été réalisée dans
une équation pour la force magnétique entre le déplacement de charges
électriques par Carl Fredrick Gauss (écrit en 1835, publié en 1865). La partie essentielle de l'équation de Gauss
montre, et textes de la physique moderne d'accord, que la force magnétique est
transversale à la force qui donne une vitesse relative (c'est-à-dire
perpendiculaire à une ligne de connexion) entre les charges. Faute d'un retour direct-force, une force
magnétique transversale peut produire une force plus grande que la force qu'il
provoque.
Le seul physicien de reconnaître dans la presse, la
signification profonde de le œuvre de Gauss, était James Clerk Maxwell (1873),
qui a déclaré " (si la formule de Gauss est correcte), l'énergie peut être
générée indéfiniment dans un système fini par moyens physiques ". Prepossessed de Helmholtz " Loi ",
Maxwell a choisi de ne pas croire l'équation de force magnétique transversale
de Gauss et de Wilhelm Weber (1846) erronée en-ligne formule a accepté à la
place. Maxwell a même admis connaître de la réprimande (1845) de Gauss de Weber
pour sa direction erronée de force magnétique comme " une complète
renverser de formule fondamentale de l'intensité et l'adoption de l'essentiel
un différent ".
En 1893, la partie critique de la formule de
l'ampère pour force magnétique, laquelle Weber et Maxwell ont rejeté et que
Helmholtz avait remplacé par son contraire explication métaphysique, a été
proposée pour la base de la mesure internationale du courant électrique,
l'ampère (ou amp), à définir en fonction de la force magnétique transversale
qui produit le courant. Mais la doctrine de Helmholtz était devenu tellement
imperméable aux faits que n'importe qui qui a contesté cette " loi "
face à la diffamation et ridicule.
La première reconnaissance d'énergie illimitée
provenait de Sir Joseph Larmor ayant déclaré en 1897, " un seul ion e,
décrivant un elliptique orbit sous une attraction à une centrale fixe... doit
rapidement perdre son énergie par rayonnement... mais dans les cas de mouvement
constant, c'est juste cette quantité qui est nécessaire pour maintenir la
permanence du mouvement dans l'éther ".
Apparemment pour apaiser les critiques de son concept hérétique, Larmor
a offert une rétractation timide en 1900: " l'énergie des orbitales
groupes... serait à travers le temps, judicieusement dissipée par le
rayonnement, afin que ces groupes ne serait pas permanentes ".
En 1911,
Niels Bohr (1924) a été gêné par la notion que le
rayonnement d'un électron en orbite drainerait rapidement son énergie pour que
l'électron devrait en spirale dans le noyau.
Whittaker (1951)
déclare, " Bohr et associés abandonnent... le principe qu'un atome qui est
émettant ou absorbant le rayonnement doit être perdre ou gagner de
l'énergie. À sa place, ils ont introduit
la notion ou rayonnement virtuel, ce qui a été propagée dans... vagues mais qui
ne transmet pas d'énergie ou la quantité de mouvement ". Par la suite, l'ensemble de la communauté
scientifique a rejeté Larmor rayonnement comme une source d'énergie réelle
parce qu'il n'est pas conforme à la doctrine universellement acceptée de
Helmholtz.
Idée de contrainte de von Helmholtz que l'énorme quantité de lumière et
de chaleur, rayonnant à partir des nombreux milliards d'étoiles dans l'univers
ne peut venir que de l'énergie déjà accumulée, a amené les scientifiques à suis
d'accord que la fusion de l'hydrogène préexistant à l'hélium, fournitures
presque toute l'énergie qui provoque la lumière et la chaleur à rayonnent à
partir du soleil et des autres commence.
Dans l'affirmative, l'univers entier est alors complètement sombre après
que la fourniture d'hydrogène présent dans les étoiles est consommée environ 20
milliards d'années. William A. Fowler
(1965) croyaient essentiellement l'hydrogène dans l'univers " est apparu
dès le début à quelques minutes de la phase de haute température et haute
densitée au début de l'univers en expansion, la soi-disant 'big
bang'..." En outre, l'énergie de
fond de l'univers était considéré par certains comme rayonnement de "
relique " du " Big Bang ".
Pour accepter l'idée de Big Bang que toutes les étoiles dans l'univers
est née en même temps, il était nécessaire de ne pas tenir compte du fait que
la plupart des étoiles sont beaucoup plus jeunes ou beaucoup plus âgés que
l'âge supposé de l'événement ponctuel, ce qui indique que leur énergie doit
avoir proviennent d'une source récurrente.
Le Big Bang dépend entièrement de l'idée que l'univers est en expansion,
qui découlent de l'interprétation que-décalage vers de Hubble le rouge avec la
distance de la source lumineuse, représente un décalage Doppler de la décrue
des étoiles et des galaxies. Cette
interprétation de l'univers en expansion a été fracassée par Tifft (1976,
1977), qui a constaté qu'observé rouge-quarts ne sont pas répartis au hasard et
en douceur sur une plage de valeurs, comme serait prévu depuis les décalages
Doppler d'un grand nombre de recul des étoiles et des galaxies. Au lieu de cela, les rouge-déplacements
observés tous tomber sur également espacés, codée des valeurs.
De plus, Shpenkov et Kreidik (2002) a déterminé que
la température de la radiation correspondant à la période fondamentale de la
motion d'orbitales d'électron dans l'atome d'hydrogène de 2,72890 K correspond
à la température du fond diffus cosmologique de K 2,7250 plus ou moins 0.0020K
. Il s'agit de rayonnements de Larmor
niveau zéro perpétuel des atomes d'hydrogène interstellaire dispersés dans
l'univers. Alors, idée de Helmholtz, que
" l'énergie dans l'univers est un montant fixe et immuable en quantité
depuis une éternité à l'éternité " ne résiste pas aux faits connus.
La grande quantité totale de chaleur-photons généré
continuellement par rayonnement de Larmor peut rendre compte d'éclairage des
étoiles et pour l'énorme chaleur et la pression dans les centres galactiques
actifs. Basée sur le fait que les
photons pièce élan, photons doivent masse posses, parce que, comme l'a expliqué
Newton, élan est la masse fois la vitesse, ce qui dans ce cas est " C
". Par conséquent, la création des
photons par induction ou par rayonnement de Larmor, crée également nouveau
massive. Les conditions que Fowler
cherchait pour nucléosynthèse d'hydrogène, sont apparemment fournie
indéfiniment dans des galaxies actives et éventuellement dans le soleil et les
autres étoiles dépassant une certaine taille.
Cette invention utilise une même source d'énergie illimitée.
Un autre principe important à cette spécification,
est que le transfert d'énergie par induction électrique a été trouvé par la
requérante pour travailler de la même manière que le transfert d'énergie par
émission et réception d'oscillation des signaux radio. Une force transversale est communiquée dans
les deux cas, la force diminue de même avec la distance, et les effets de
blindage et de réflexion sont identiques.
Puisque les signaux radio sont communiquées par des photons, la
requérante considère que force inductive est également communiquée par les
photons. Le rayonnement du nouvellement formé résultats de photons inductive
lorsqu'une charge accélérée subit un changement de direction de
l'accélération. Rayonnement inductif se
produit lorsque l'accélération des charges électriques est inversée, comme
rayonnement de Röntgen, en oscillateur linéaire de Hertz (et toutes les autres
antennes de radiodiffusion) et en bobines qui transportent un courant
alternatif.
Dans un cas similaire, lorsque les charges électriques se déplacent en
courbe grâce à une accélération centripète sans cesse changeante, inductifs
photons sont émises régulièrement. Cela inclut
le rayonnement d'électrons orbitant autour des noyaux atomiques (rayonnement de
Larmor) et d'électrons de conduction qui circule dans une bobine de fil, si le
courant est stable ou non. Photons
inductives circulairement produits induisent un mouvement circulaire
(diamagnétisme) dans des électrons mobiles situés près de l'axe de mouvement
circulaire de l'électron.
Dans les deux cas inverse-accélération et accélération centripète,
photons inductives transmettent une force à électrons mobiles qui est transversale
à chemin de propagation du photon.
Opinion exprimée Lapp et Andrews (1954), " photons de faible
énergie produisent des photoélectrons perpendiculairement à leur chemin
d'accès... ". Cette même force à
angle droit sans retour direct-force, s'applique également, pour tous les
électrons de conduction qui sont accélérés par des photons de faible
énergie. Donc, énergie inductive
est admissible à l'exemption de la Loi de conservation de l'énergie de
Helmholtz même infini principe qui soustrait l'énergie magnétique.
La force transversale qui produit inductif photons
envoyées aux électrons mobiles, est opposée en direction de la circulation
simultanée de la charge primaire qui produit le rayonnement. Ceci est illustré par le courant induit de
Faraday en face de l'actuelle induisant ainsi que par le mouvement circulaire
induite par nonmagnétiques qui, dans un sens de rotation, est opposé à la
motion circulaire électronique dans la bobine, le produit. Un écoulement oscillant des électrons au sein
d'une boucle d'une bobine de fil, induit une force sur les électrons de
conduction qui est dans la direction opposée en boucles adjacentes du même
fil. Cela se traduit par auto-induction.
La prise de conscience que l'énergie transmise par
des photons est cinétique et non électromagnétique est important à cette
spécification. Couplage inductif
rayonnées photons de faible énergie, rayons de lumière et les rayons x ne
peuvent être déviés par et champ électrique ou magnétique en raison de la
charge neutre des photons. Ni les
photons neutres ne portent un champ électrique ou magnétique avec eux. Rayonnement de photons est produite par un
changement dans l'accélération d'une charge électrique, ainsi que dans des cas
spéciaux a-t-elle une origine électrocinétique qui implique une force
magnétique. Pour rendre hommage à ces
faits, le demandeur utilise le terme " spectre électrocinétique " à
la place de"spectre électromagnétique ".
Un autre principe important pour cette
spécification est la prise de conscience que, bien que la charge de l'électron
a une valeur constante dans toutes les conditions, la masse d'un électron n'est
pas fixe, montant invariable. Tous les
électrons libres, comme dans les rayons cathodiques ont exactement la même
quantité de masse à des vitesses relativistes infra. Cela est appelé " normal " masse et
est notée par moi. Électrons libres ont
une charge unique pour le rapport de masse que rend la force magnétique
résultant d'une vitesse relativiste Sub communiquée à un tel électron, est
exactement égale à l'énergie d'entrée avec des électrons " normales
".
Aussi, lorsqu'un électron normal est donné à une
accélération des relativiste, la force inductive qu'elle produit est égale à la
force qu'il reçoit. La masse des
électrons très conducteurs de métaux est apparemment très proche de la normale,
mais tout gain énergétique inductive très légère pourrait être masquée par
inefficacités. L'ubiquité des électrons
libres et les électrons de conduction des métaux a conduit à l'affichage
qu'électron masse est un chiffre jamais variables qui permettrait à la Loi de
conservation de l'énergie à appliquer à l'énergie magnétique et énergétique
inductive.
Des déterminations précises de masse d'électron
dans des matériaux solides ont été rendues possibles par résonance
cyclotronique, également appelé résonance diamagnétique. La force diamagnétique produite par le flux
constant d'électrons dans une bobine de fil, induit les électrons mobiles d'un
semi-conducteur à déplacer sur une orbite circulaire de rayon indéfinie, mais à
une certaine fréquence angulaire. Cette
fréquence est uniquement liée à la force de l'induction et la masse de
l'électron. Dans le même temps, une
force de répulsion magnétique est développée par la vitesse relative entre le
flux d'électrons dans la bobine et les électrons de conduction, causant les
électrons mobiles du semi-conducteur à déplacer dans une trajectoire
hélicoïdale loin de la bobine, plutôt que dans des cercles planaires. Seulement deux mesures sont nécessaires pour
déterminer la masse d'un tel électron : la fréquence cyclotron qui résonne avec
la fréquence du mouvement circulaire de l'électron et les effectifs de la force
inductive, qui est déterminée par le courant et les dimensions de la bobine. Étant donné que le champ magnétique coproduit
est lié aux mêmes paramètres, sa mesure sert un substitut pour la force
inductive.
Parce que la masse mesurée des électrons de
conduction dans les semi-conducteurs est inférieure à la normale, une
explication compliquée a été adoptée afin de défendre la constance de la masse
de l'électron afin de soutenir la doctrine de l'énergie de Helmholtz. Une force supplémentaire est censé être reçue
de l'énergie vibrationnelle treillis-vague du cristal (dans ce qui devra être
un acte de réfrigération autonome) pour faire masse normale électrons se
déplacent plus vite que prévu sur un chemin circulaire, afin de donner
l'impression que l'électron a moins de masse que la normale. Dans cette explication, l'électron est
considéré comme une onde de sortie barbouillé, plutôt qu'une particule, qui est
contredite par le recul de billard-boule-comme d'un électron lorsqu'il est
heurté par un quantum de rayonnement, tel que décrit par Arthur Crompton et
Samuel Allison (1935).
L'erreur qui a emprunté l'énergie peut fournir un
gain de vitesse d'un électron, est plus apparent dans le cas de mouvement
linéaire. La théorie de la masse
effective considère que la plus grande vitesse linéaire est causée par un coup
de pouce donné aux électrons de la masse normale par une " onde
longitudinale " communiquée par une force externe appliquée dans la même
direction que le mouvement de l'électron.
Étant donné que cette onde longitudinale est également considéré comme
ayant une source de vibrations du réseau cristallin, la théorie de la masse
effective s'appuie sur une inversion de l'entropie en violation de la seconde
loi de la thermodynamique.
Aucune contribution raisonnable d'énergie
directionnelle direct ne peut être appelée depuis n'importe quelle source de
communiquer anormalement grande vitesse pour les électrons de conduction dans
les semi-conducteurs. Donc, le fonctionnement des modes de réalisation appareil
décrit ci-après, s'appuie sur les électrons ayant des propriétés de particules
et électrons ayant la masse d'inertie inférieur puis normale sans invoquer des
forces spéciales. Ceci est soutenu par
déclaration (1999) Brennan, que " le problème compliqué d'un électron se
déplaçant dans un cristal sous l'interaction d'un potentiel périodique mais
compliquée, peut être réduite à celle d'une particule libre simple, mais dont
la masse est mis à jour le ". Le
terme " efficace " est considéré dans la présente redondant en se
référant à la masse d'inertie vraiment, mais " masse effective " a
encore la pertinence en se référant au mouvement net de postes vacants
orbitales ou " trous " dans la direction opposée des électrons de
faible masse.
Par F = ma, un électron de faible masse
reçoit une plus grande accélération et une plus grande vitesse d'une force
donnée qu'un électron de masse normale. La vitesse et l'énergie cinétique
transmise à un corps chargé électriquement par une force, sont déterminées par
la charge électrique sans tenir compte de la masse du corps. Ayant une plus petite quantité de masse,
permet à un organisme d'atteindre une vitesse supérieure avec une force
donnée. Par conséquent, la force
magnétique produite par l'accusation à cette vitesse plus élevée sera
supérieure à celle qu'elle aurait normalement pour la même quantité de
force. Cela permet aux électrons de
faible masse produire une force magnétique qui est supérieure à la force
appliquée.
Aussi, la quantité d'énergie de rayonnement
inductive d'électrons accélérés est liée à la charge d'un électron sans tenir
compte de sa masse. L'énergie des
rayonnements inductifs augmente avec le carré de l'accélération d'électrons de
l'équation de Larmor (1900), tandis que l'accélération est inversement
proportionnelle à la masse d'électron moindre par rapport aux électrons normal
massive. Par conséquent, l'accélération
supérieure à la normale des électrons de faible masse, permet le rayonnement
d'énergie de photons inductive agrandie à un facteur d'amplification qui est
proportionnel au carré inverse de l'électron de masse, par exemple, le facteur
de grossissement inductif-énergie des photoélectrons de séléniure de cadmium
0,13 de l'électron normale masse est 2 (0,13), soit 59 fois.
Électrons semblent acquérir ou faire la masse de
photons afin de s'adapter aux contraintes des orbites particulières autour des
noyaux, car chaque orbite dicte un électron très spécifique massive. Des métaux, où les électrons de conduction
semblent se déplacer comme le ferait un gaz, on pourrait penser qu'ils
assumeraient la masse normale d'électrons libres. Mais le plus grand libre parcours moyen des
électrons dans les métaux plus conductrices est aurait été d'environ 100
atomique espacements entre les collisions (pop, 1997), alors les électrons de
conduction apparemment sont replier sur orbite de temps à autre et ainsi
retrouver leurs valeurs de masse de métal spécifique.
Comme les électrons de conduction passent d'un type
de métal à l'autre, se perdent ou de gain de chaleur-photons pour ajuster leur
masse aux différentes contraintes orbitales.
Dans un circuit comportant deux conducteurs métalliques différents
placés en série contact entre eux, le flux d'électrons de conduction dans un
sens provoque l'émission de chaleur-photons à la jonction, tout en un flux
d'électrons dans les causes de la direction opposée de refroidissement à la
suite d'ambiants chaleur-photons absorbés par les électrons de conduction à la
jonction (effet de refroidissement Peltier).
Lorsqu'un métal est associé avec un semi-conducteur dont électrons
conducteurs ont la masse beaucoup plus faible que dans les métaux, beaucoup plu
chauffage ou le refroidissement se produit à leur jonction.
John Bardeen (1941) a signalé que la masse
(effective) d'électrons supraconducteurs à supraconducteurs à basse température
est seulement aussi grande que la masse des électrons normales x 0.001. Cela est démontré lorsque les électrons
supraconducteurs sont accélérés jusqu'à une vitesse circulaire beaucoup plus
élevée que la normale dans les courants de Foucault induits nonmagnétiques, qui
se traduit par d'énormes forces magnétiques qui sont capables de lourds objets
magnétiques en lévitation. Électrons avec 0.001 fois masse normale sont
apparemment dépourvu (ou presque dépourvu) de la masse du photon inclus, donc
normales électrons sont déduites aux bandes sur 10000 fois plus inclus photon
de masse que l'électron nu propre masse.
Le moyen par lequel photon masse peut-être être
incorporé au sein ou éjecté d'électrons, peut être déduite des données
connues. Basé sur la coupe transversale
de diffusion Thompson, le rayon classique d'un électron normal est de 2 x 10-15
cm. Si l'électron a une charge uniforme
tout au long d'une sphère de ce rayon, la vitesse périphérique dépasserait
largement la vitesse de la lumière afin de fournir le moment magnétique
observé. Dehmelt (1989) a déterminé que
le rayon de la charge de filature qui crée le magnétisme de l'électron, est
environ de 10-20 cm. Cette
incongruité apparente peut s'expliquer si l'électron est considéré comme une
coquille vide (qui est proportionnelle à la masse de minuscules d'électrons nus
en comparaison avec le très grand rayon) et que la charge négative de la
coquille n'est pas la source du moment magnétique.
On sait depuis longtemps qu'un photon peut être
divisé en un ion négatif (électron) et un ion positif (positron), chacune ayant
le même montant de frais mais de signe opposé.
Électrons et des positons peuvent se recombiner en photons
électriquement neutres, donc il est évident que les photons sont composées d'un
positif et une ion négatif. Deux ions tourne autour de l'autre pourraient
produire la nature ondulatoire du photon.
La seule taille d'ion de photons qui peut exister comme entité distincte
a une charge d'exactement un de plus ou moins un, tandis que les ions peuvent
avoir une charge beaucoup plus ou beaucoup moins importants et masse lorsqu'il
est combiné en photons, tant que les deux ions sont égales en charge et de
masse. Combiné à un photon, les deux
ions sont apparemment attirées ensemble si fortement que leurs volumes
individuels sont beaucoup plus petits que comme des entités distinctes.
Lorsqu'un photon dipolaires entre une coquille
d'électron, sa portion d'ions négatifs est censée être forcé vers le centre de
la coque par répulsion coulombienne, tandis que les ions positifs le photon
seraient être attirée par la charge négative de la coquille tout aussi dans
toutes les directions. Les ions négatifs
photon seraient probablement fusionner dans un seul corps au centre de
l'électron, tandis que le passage d'ions positifs serait en orbite autour de
l'ion négatif centralisée pour conserver le moment cinétique du photon. La haute vitesse périphérique de ce photon en
orbite masse permettrait aux parties de matériel de photon pour redéployer et
sortir de la coquille d'électron à la même vitesse à laquelle ils sont entrés
dans l'électron, c'est-à-dire, la vitesse de la lumière. L'orbite de la charge
positive de photon à faible rayon de Dehmelt, probablement représente le moment
magnétique observée dans les électrons de la masse normale.
Les électrons de conduction de faible masse libérée
dans les semiconducteurs intrinsèques (qui sont aussi photoconducteurs, par
leur nature) et dans les semi-conducteurs dopés, sont pour la plupart protégés
contre l'acquisition de masse de la chaleur ambiante photons par les propriétés
isolantes-chaleur des semi-conducteurs.
En revanche, faible masse électrons injectés dans la conductivité
thermique des métaux, acquérir rapidement la masse de photons la chaleur
ambiante de l'existence de conditions cryogéniques, mais ils sont vulnérables à
la chaleur-des photons internes créés par induction excessive
Les électrons de conduction des métaux, se
déplacent généralement en groupe à des vitesses de dérive de moins d'un
millimètre par seconde, bien que la vitesse des effets électriques s'approche
la vitesse de la lumière. (Photons sont
probablement impliqués dans le mouvement de l'énergie électrique dans les
conducteurs métalliques). En revanche,
électrons de faible masse conductrices peuvent se déplacer individuellement à
grande vitesse dans les supraconducteurs et les semi-conducteurs. Brennan (1999, p. 631) indique la vitesse de
dérive d'un électron particulier se déplaçant dans un semi-conducteur, d'être
un micromètre environ 10 picosecondes, qui équivaut à 100 kilomètres par
seconde.
La concentration de l'électrons de conduction dans
les métaux, c'est le même que le nombre d'atomes, alors que dans les
semi-conducteurs, les électrons de faible masse mobiles qui sont libres de se
déplacer, peut varier considérablement avec la quantité de certains photons de
rayonnement reçu. Étant donné que
l'amplitude d'un courant électrique est qu'un Résumé du nombre d'électrons
impliqués, multiplié leurs vitesses de dérive respectifs, le courant développé
par un petit ensemble de photoconductrices électrons se déplaçant à grande
vitesse, peut dépasser le courant d'un plus grand nombre d'électrons de
conduction se déplaçant à une vitesse très faible dans un métal.
Une caractéristique générale des semi-conducteurs
intrinsèques, c'est qu'elles deviennent photoconducteurs proportionnellement à
la quantité de bombardements par certaine fréquence particulière
d'électron-libératrice (ou bande de fréquences) de l'énergie du photon, jusqu'à
une certaine limite. Le montant du
bombardement par la longueur d'onde précise (ou, de manière équivalente, la
fréquence), augmente ainsi que toutes les autres longueurs d'onde de photon
lorsque la température ambiante augmente, c'est-à-dire comme l'aire sous le
rayonnement du corps noir de Planck courbe augmente. Par conséquent, la conductivité des
semi-conducteurs continue d'augmenter avec la température, tandis que la
conductivité descend à près de zéro à basse température, sauf en cas de
supraconductivité.
Une seule particule alpha haute énergie peut
libérer un grand nombre d'électrons de faible masse dans un semiconducteur
minces, comme Leimer (1915) énergie-loupe expérience semble montrer. Rayonnement alpha de Leimer était situé près
de l'extrémité lointaine d'un fil de suspension d'antenne d'une longueur non
déclarée, quand il a connu l'augmentation maximale d'énergie magnétique dans la
bobine de l'ampèremètre dans le récepteur.
Les électrons de faible masse devaient ont parcouru toute la longueur de
l'antenne de suspension et de la ligne de connexion à son appareil de réception
sans rencontrer aucun trou de piégeage.
En supposant que ces électrons franchi une distance de 1 à 10 mètres en
moins de la moitié-cycle de la fréquence radio, (c'est-à-dire moins de 4
microsecondes à 128 kHz) date à laquelle la direction de l'électron de faible
masse aurait été annulée, cela équivaudrait à des vitesses de 25 à 250 km/sec.
Un grand nombre d'électrons supraconducteurs est
réglable en mouvement par le rayonnement de photons inductive. En revanche, rayonnements inductifs photon
peut passer principalement par le biais de photoconducteurs disposant de
faibles concentrations d'électrons mobiles, de faible masse. Interprétation de la requérante d'experience
de Leimer est que les électrons de faible masse libérées de l'enduit
semi-conducteur du fil d'antenne, n'étaient pas directement accélérée par les
photons inductives du signal radio, mais plutôt furent accélérés à des vitesses
élevées par un champ électrique oscillant, créé dans le fil métallique par les
photons de la radio.
Un examen d'une expérience effectuée par File et
Mills (1963), montre que la très faible masse d'électrons supraconducteurs est
responsible l'origine des supercourants diffèrent des courants électriques
normales. Une bobine supraconductrice
solénoïdale (comprenant un fil d'alliage Zr Nb - 25 % en dessous de 4,3 degrés
K.) avec les bornes soudée ensemble pour faire un chef d'orchestre continue, a
été employé. Extrêmement lent déclin des
supercourants induits ont été observées, ce qui peut être attribuée à une
augmentation énorme des auto-induction de la bobine. Car un supercourant approche sa charge
maximale asymptotiquement en décharge, une mesure pratique de la charge de la
bobine ou le taux de décharge est la " constante de temps ". La constante de temps a la même valeur pour
les chargements et déchargements, et elle est définie comme (a) le temps
nécessaire pour charger la bobine à 63 % de la quantité maximale de courant
inductible dans la bobine par une force diamagnétique donnée, ou (b) le temps
nécessaire pour s'acquitter de 63 % du courant induit de la bobine.
Dans des conducteurs normaux, la constante de temps
inductive est calculée par l'inductance de la bobine, divisée par la résistance
de la bobine. En utilisant une équation
empirique, l'inductance de la bobine dans son état non-supraconducteur est
évaluée à 0,34 Henry, basé sur un aimant à double couche de 384 virages qui
mesure 4 pouces (10 cm) de diamètre et 10 pouces (25 cm) de long. La résistance du fil diamètre 0,020 pouce
(0,51 mm) à une température de 5 degrés K. (juste au-dessus de Tc) est estimée
en utilisant des données pour Zr seul, à être ohms 4 x 102. (Données de résistivité n'étaient pas
disponibles pour Nb ou l'alliage du sujet).
Dans des conditions non-supraconducteurs, la constante de temps de
charge et décharge cette bobine est ainsi évaluée à environ 8 x 10-5
sec.
Le temps qu'il a fallu charger vers le haut un
supercourant dans la bobine dans l'expérience n'était pas indiqué. Mais, selon
le rapporté 50 re-energisings et dosages magnétiques 200 heures, le temps de
charge mesuré dans l'état supraconducteur est calculé pour être pas plus de 4
heures en moyenne.
À l'aide de la formule m (1941) de Bardeen est
approximativement égale à me fois 10-4 pour l'ordre de grandeur de
l'électron de supraconducteurs Tc faible de masse, et à l'aide de l'équation de
Larmor (1900) qui porte la puissance de rayonnement inductif à la place de
l'accélération de l'accusation, l'inductance de la bobine est censée passer ici
(104)2 = 108 fois dans l'état supraconducteur. Ainsi, l'augmentation de la constante de
temps de charge vers le haut le supercourant calculée est 8 x 10-5 x
108, ce qui équivaut à 8 x 103 secondes, soit 2,2 heures,
qui est du même ordre de grandeur que le temps maximal de charge réels. L'auto-induction, ce montant a augmenté parce
que les électrons de faible masse sont accélérés 104 fois plus vite.
Dans le cas de décharge, le temps constant du
supercourant a été projeté par fichier et moulins de mesurée déclins observés
sur une période de 21 à 37 jours. Les projections des deux baisses 63 %
convenu étroitement à 4 x 1012 secondes (= 1,3 x 105
ans). Par conséquent, la
constante de temps de décharge supercourant, basée sur des mesures réelles
saillies, avait augmenté de 5 x 1016 fois sur la constante de temps
pour les électrons de la masse normale.
La force motrice pendant la charge, avait été la
force appliquée inductive, tandis que la force motrice au cours de l'exercice
était le supercourant qui avait été grossie 108 fois. Par conséquent, pendant le déchargement de la
supercourant, la constante de temps est encore une fois augmenté de 108
fois, donc l'augmentation totale calculée la constante de temps de décharge est
de 108 x 108 = 1016 fois supérieure à la
constante de temps normale. Cela a calculé
la valeur de la constante de temps non-supraconducteurs, basée uniquement sur
l'augmentation des rayonnements inductifs en raison de la masse de l'électron
extrêmement faible, se compare avantageusement en ampleur avec la valeur
réellement observée de 5 x 1016 fois la normale-constante de temps.
La bobine supraconductrice nécessaire pas plus de
quatre heures pour recharger le supercourant, encore pendant le rejet
subséquent, que la bobine supraconductrice a été projetée à émettre de
l'énergie des photons inductive de l'accélération centripète des électrons
supraconducteurs pour 130 000 ans avant de diminuer de 63 %. Si cette expérience pourrait avoir lieu où
aucune énergie ne serait nécessaire au maintien des conditions cryogéniques
critiques, comme dans l'espace, la décharge prolongée de cette bobine sous
tension démontrerait clairement la création d'énergie sous forme de photons
nouvellement créé inductif rayonnant depuis les électrons de faible masse
supraconductrices qui circulent autour des boucles de la bobine. Requérante interprète cette chaîne comme
montrant que les électrons de faible masse sont capables
d'inductif-énergie-grossissement fondé uniquement sur leur masse par rapport à
celle des électrons normaux.
Dans les modes de réalisation décrits ci-dessous,
l'énergie inductive agrandie des électrons de faible masse est utilisé en
bobines pour la production d'énergie électrique en utilisant un flux de photons
inductif accélérées qui alterne en direction.
Cela, pousse à son tour, électrons de faible masse de manière
oscillatoire, donc cette inversion de forcée implique seulement une seule phase
de grossissement inductif-énergie, plutôt que les deux étapes (charge et
décharge naturellement) dans l'expérience précédente.
Mode de Fonctionnement
Inductives photons rayonnant à partir d'un courant
électrique oscillant dans un envoi conducteur (p. ex. d'une antenne de
radiodiffusion ondes radio) transmettent une force, sur les électrons de
conduction dans un conducteur de récepteur, qui est transversale à la direction
de l'incidence des photons incidents inductives sur le récepteur
conducteur. En conséquence, aucune
force-dos n'est transféré directement vers le conducteur de l'envoi. Demandeur a découvert que l'action de cette
force transversale sur la faible masse des électrons dans un conducteur
récepteur est analogue à l'action de la force magnétique transversal de Gauss
sur les électrons libres dans un conducteur, qui n'est pas soumis à la loi
cinétique de conservation de l'énergie.
Si le chef d'orchestre récepteur a les électrons de conduction de faible
masse, alors cette force transversale serait leur donner une plus grande
accélération vers les électrons de faible masse que cela il serait donnent aux
électrons libres normales. Les vitesses de dérive supérieures résultant des
électrons de faible masse que la normale libre d'électrons dans le conducteur
de récepteur, seraient céder une magnitude accrue d'inductive force produite
par les électrons de faible masse dans le conducteur de récepteur et donc
produire un grossissement de l'énergie de l'irradiation des photons inductives.
La direction de la force transversale communiquée
par les photons inductives rayonnées sur les électrons de conduction dans le
conducteur de récepteur est opposé au sens de l'écoulement d'électron
correspondant dans le conducteur de l'envoi.
Cette relation est
similaire à l'équipe inductive des électrons dans le bobinage secondaire d'un
transformateur, qui est également opposé à la direction du flux d'électrons
dans la bobine primaire.
Divers modes de réalisation de générateur électrique du demandeur
emploient inductives photons émis par des oscillations électriques dans une
" bobine émettrice ".
Inductives photons sont émises par la bobine émettrice vers et la bobine
réceptrice inductif-photon, appelée une " bobine énergie-loupe ", qui
comprend un matériau photoconducteurs ou supraconducteur, ou autre matériau
approprié, tel que décrit ci-dessous. La bobine de
l'énergie-loupe est placée dans des conditions favorable pour la production
d'électrons de faible masse qui participent à la conduction électrique dans la
bobine de l'énergie-loupe. Par exemple,
si la bobine d'énergie-loupe est constituée de matériaux photoconducteurs, la
bobine est fournie avec un excitateur de photoconduction. Alternativement, si la bobine d'énergie-loupe
est faite d'un matériau supraconducteur, la bobine est placée dans un
environnement à la température (T) pas supérieure à la température critique
(Tc) ; c'est-à-dire, T < Tc. Dans
l'exemple de l'ancien, l'excitateur de photoconduction peut être une source
d'éclairage qui donne une longueur d'onde appropriée des rayonnements
électrocinétique excitive. Si la bobine
d'énergie-loupe est composée d'un semi-conducteur dopé, la condition qui
fournit des électrons de faible masse mobiles déjà existe.
Dans la bobine énergie-grossissant, l'accélération
supérieure à la normale des électrons faible masse produit une plus grande que
la normale des forces inductives sous forme de rayonnement supérieur à la normale
des photons inductives de la bobine. Le
résultant ont augmenté inductif-photon énergétique depuis le photoconducteur ou
supraconducteur est convertie en énergie électrique utile dans une bobine de
sortie à couplage inductif sur la bobine de l'énergie-loupe. La bobine de sortie peut être faite de fil
métallique isolé. Une bobine de sortie
exemplaire est située coaxialement avec et imbriquée, la bobine de
l'énergie-grossissement. Une bobine de ce type est appelée dans les présentes,
une " bobine de sortie interne ".
La capacité de l'appareil sujet à produire plus
d'énergie que la consommation d'énergie, de sortie est basée sur la bobine de
sortie recevant plus de l'énergie agrandie de la spirale de l'énergie-loupe est
renvoyé comme un arrière-force de la bobine de sortie sur la bobine de
l'énergie-loupe. Ce principe est appelé
ci-après " levier d'énergie ".
Les oscillations dans le serpentin de
l'énergie-grossissant commencent par une source d'énergie externe qui fournit
une impulsion initiatrice du flux d'électrons dans la bobine émettrice. Par exemple, la source d'énergie externe peut
être un électro-aimant adjacent indépendant ou un aimant permanent adjacent
s'installe rapidement par rapport à la bobine émettrice. L'impulsion ouverture démarre une oscillation
dans la bobine émettrice qui stimule le rayonnement de photons inductives de la
bobine émettrice à la bobine de l'énergie-loupe. L'énergie de la source d'énergie externe est
magnifiée par l'appareil tant que la bobine de l'énergie-loupe n'agit pas comme
un oscillateur indépendant à une fréquence différente. Oscillation indépendante est évitée de
préférence en reliant les extrémités ou les bornes de la batterie
d'énergie-grossissant les uns aux autres de telle manière qu'il en résulte une
bobine continue, ou un système continu de multiple-bobine ou systèmes, reliés
entre eux de telle sorte que la continuité existe pour la conduction des
électrons de faible masse dans tout le système de l'intégralité de la
bobine. La bobine de l'énergie-loupe crée
avec plus d'énergie dans la bobine de sortie supérieure à l'énergie de
l'impulsion initiale. Le résutat
agrandie de l'énergie électrique produite par l'appareil est disponible dans
une boucle de travail à des fins utiles.
Après le lancement, l'engin est fait autonome à
l'aide d'une boucle de contre-réaction disposée en parallèle avec la boucle de
travail qui comprend la bobine émettrice, et avec un condensateur situé dans la
boucle de retour pour le rendre un circuit L-C, c'est-à-dire après le démarrage
de l'appareil à l'aide de la source d'énergie externe, l'appareil devient
autonome de résonance, qui permet à la source d'énergie externe à être
dissociée de l'appareil sans causer l'appareil visant à cesser la production
d'énergie électrique.
Pendant le fonctionnement normal d'auto-entretenue,
une partie de l'énergie électrique est retournée à la bobine émettrice par la
boucle de contre-réaction, surmontant ainsi la nécessité d'utiliser la source
d'énergie externe pour maintenir les oscillations dans la bobine
émettrice. En d'autres termes, après le
démarrage, l'énergie externe qui a été utilisé par l'envoi d'enroulement pour
exciter les matériaux photoconducteurs ou le matériau supraconducteur dans le
serpentin de l'énergie-loupe est remplacé par une partie de l'énergie produite
par l'appareil lui-même. Le reste de
l'énergie électrique est disponible dans la boucle du travail à des fins
utiles.
Lancer la génération d'énergie électrique de
l'appareil, tire parti du fait que la dos-force inductive envoyée à partir de
la sortie d'enroulement sur la bobine de l'énergie-loupe (et donc en fin de
compte, retournez à la bobine émettrice), arrive à la bobine émettrice un cycle
derrière le pouls correspondant qui a initié le flux d'électrons. Ce décalage d'un cycle de la dos-force, ainsi
qu'un décalage d'un cycle correspondant dans le feed-back, permet aux petites
impulsions départ produites dans la bobine émettrice à assurer progressivement
une plus grande de la production électrique chaque cycle successifs. Par conséquent, en supposant que la charge
électrique n'est pas excessive au démarrage, seulement une relativement peu qui
cycles de la source d'énergie externe en général sont nécessaires pour
atteindre la production par l'appareil d'un montant de puissance suffisante
pour la charge ainsi que de fournir une énergie suffisante contre-réaction à la
bobine émettrice de manière durable en voiture.
Un demi-cycle de la lag un cycle se produit entre
une accélération initiale des électrons dans la bobine émettrice et une
oscillation initiale correspondante à la bobine de l'énergie-loupe. Ce décalage demi-cycle se produit parce que
les photons d'induction ne sont pas émises par l'accélération initiale des
électrons dans la bobine émettrice, mais plutôt sont émises lorsque les
électrons sont accélérés inverse.
(Kramers, 1923 et Compton et Allison, 1935, p.106). Comme les photons néoformés sont transmis par
la décélération respectif des électrons dans la bobine émettrice, les photons
de nouveau encore plus se forment simultanément par la nouvelle direction
(c'est-à-dire le sens inverse) de l'accélération sous conditions
d'oscillation. Ainsi, le rayonnement de
photons d'électrons accélérés alternativement dans le sens inverse de la force
véhiculée, continue chaque demi-cycle après le demi cycle initial.
Demandeur a également découvert qu'un demi-cycle
décalage se produit également entre le débit initial des électrons dans la
bobine primaire d'un certain type de transformateur, qui est simplement composé
de bobines imbriqués coaxialement plutôt que d'être à couplage inductif par un
noyau de fer et le flux d'électrons résultant induite dans l'enroulement
secondaire. Lorsqu'il est appliqué à cet
appareil, ces trouver indiquent qu'un deuxième décalage de moitié-cycle se
produit entre l'accélération des électrons de faible masse dans la bobine
grossissant à l'énergie et le flux d'électrons correspondants induite dans
l'enroulement de la sortie. Le feed-back
de la bobine de sortie augmente le flux d'électrons dans la bobine émettrice un
cycle complet après l'impulsion initiale.
Comme indiqué plus haut, la bobine de
l'énergie-loupe comprend soit un photoconducteur, un semi-conducteur dopé soit
un supraconducteur comme source d'et comme chef d'orchestre, des électrons de
faible masse. La configuration générale
de la bobine est similaire dans les deux cas.
La bobine, y compris un photoconducteur ou semi-conducteur dopé, a un
avantage opérationnel à des températures normales, et la bobine, y compris un
supraconducteur a un avantage opérationnel à des températures sous critiques (T
< Tc), comme dans l'espace extra-atmosphérique.
Réalisations Représentatives
Maintenant, on se reportera à la Fig.1A à Fig.1C et Fig.2A et
Fig.2B qui dépeignent une bobine émettrice 20 connectée à une source
de courant alternatif 21. La
bobine émettrice est montrée ayant un profil cylindrique désirable, souhaitable
avec une section circulaire comme la configuration plus efficace. Dans la Fig.1A et Fig.1B, des
oscillations électriques de la source 21 sont menées à l'envoi de bobine
20 où ils provoquent des photons inductives 22 à rayonnent à
partir de la bobine émettrice. Les photons
rayonnées 22 véhiculent des forces transversales de la même manière
qu'une antenne de radiodiffusion transmet l'énergie oscillant. La bobine émettrice 20 peut être un
seul ou plusieurs couches de fil métallique isolé (par exemple le fil de cuivre
isolé). Une seule couche suffit, mais une ou plusieurs couches supplémentaires
peuvent augmenter l'efficacité opérationnelle.
Si nécessaire ou souhaité, les tours de fil peuvent se former sur un
substrat cylindrique d'un diélectrique approprié.
Les photons inductives 22 rayonnant de la
bobine émettrice 20, se propagent à une bobine d'énergie-grossissant 24
ayant de préférence un profil cylindrique qui s'étend parallèlement à la
bobine émettrice. Dans l'incarnation, illustrée à la Fig.1A
et Fig1B, la bobine d'énergie-grossissant 24 ne met pas fin aux
extrémités, mais au contraire, il est construit avec un connecteur 30 pour
former un chef de train continue. La
bobine d'énergie-grossissant 24 est souhaitable une bobine hélicoïdale,
faite d'un matériau comprenant un matériau photoconducteurs ou supraconducteur,
ou autre matériau approprié. Si nécessaire
ou désiré, la bobine de l'énergie-loupe peut se former sur un substrat qui, si
utilisé, préférence est transmissif au rayonnement inductif-photon produit par
la bobine.
Dans une bobine d'énergie-grossissant 24 faite
d'un matériau supraconducteur, une importante population d'électrons de faible
masse conductrices est produite dans la bobine en abaissant la température de
la bobine jusqu'à un point situé au-dessous de la température critique pour ce
matériel. A titre d'exemple, les températures sous-critiques sont facilement
disponibles dans l'espace ou sont produites dans des conditions cryogéniques.
Dans une bobine d'énergie-grossissant 24 faite d'un matériau
photoconducteur, une importante population d'électrons de faible masse
conductrices est produite dans la bobine en éclairant la bobine avec les
photons d'une longueur d'onde appropriée, tels que les photons produits par un
excitateur de photoconduction 26.
L'excitateur photoconducteur 26 préférence est situé et
configurée de manière à éclairer substantiellement au moins du même côté de la
bobine d'énergie-grossissant 24 qui reçoit les photons inductives 22 rayonnant
directement à partir de la bobine émettrice 20. Par ailleurs, l'excitateur de photoconduction
26 peut être situé et configuré afin d'éclairer tous les côtés de la bobine
d'énergie-grossissant 24. Dans la
réalisation dépeinte, l'excitateur de photoconduction 26 peut être au
moins une lampe à incandescence (comme illustré), alimentée par les circuits
classiques (non illustré). L'excitateur
de photoconduction 26 peut également être au moins une lampe à décharge
ou une ou plusieurs Diodes électroluminescentes. La longueur d'onde produite par l'excitateur
de photoconduction 26 peut être, par exemple, dans l'infrarouge (IR),
visible, ultraviolet (UV), ou la plage de rayons x tel que requis par le
matériau photoconducteur particulier dans l'énergie-loupe bobine 24. Une autre forme possible de l'excitateur de
photoconduction 26, est une source de photons dans le gigahertz ou la
portion de térahertz du spectre électrocinétique. Autres excitateurs de photoconduction sont
configurés, au besoin, pour produire une longueur d'onde appropriée de la
partie d'ondes radio du spectre électrocinétique. L'éclairage peut être soit directement de
l'excitateur de photoconduction 26 à la bobine d'énergie-grossissant 24
soit transporté d'un excitateur de photoconduction installé à distance sur
l'énergie-loupe la bobine par fibres optiques, conduits de lumière ou
similaires.
Fig.1B et Fig.1C sont vues fin
orthogonaux respectifs de la bobine émettrice 20 et énergie-loupe bobine
24 illustré à la Fig.1A.
Le rayonnement de photons inductives 22 de la bobine émettrice 20,
est indiqué schématiquement dans la Fig1A, Fig.1B et Fig.1C de flèches
petits, en escalier. Les forces envoyées
par les photons 22 pour les électrons de faible masse conductrices dans
l'énergie-loupe bobine 24, remplaçant dans les directions qui sont
opposé les directions respectives des flux d'électrons simultané à l'envoi de 20
bobines. Chaque fois que la phase
d'oscillation particulière du flux d'électrons dans la bobine émettrice 20 est
en direction de la flèche incurvée 25 a adjacente à la bobine émettrice 20
en Fig.1B les causes de force transversale photon qui en résulte un
flux d'électrons de faible masse dans l'énergie-loupe bobine 24,
représenté par la flèche incurvée 27 a adjacent à la bobine
d'énergie-grossissant 24.
Le secteur ombragé 29, illustré à la Fig.1B,
désigne la proportion des rayonnements de photons inductive 22 de la
bobine émettrice 20, effectivement reçue par le simple bobinage
d'énergie-grossissant 24 montré, par rapport à la radiation de 360
degrés toute de photons inductives 22 de la bobine émettrice 20. Mis à part une petite quantité de
rayonnements inductifs-photon perdu aux extrémités de la bobine émettrice 20,
la quantité relative de l'énergie totale de photons inductive rayonnement reçue
par la bobine d'énergie-grossissant 24 est déterminée par l'angle
sous-tendu par la bobine d'énergie-grossissant 24, par rapport à
l'ensemble 360 degrés d'inductif-photon émis par la bobine émettrice 20
Dans Fig.1C, les électrons de conduction de
faible masse de la batterie d'énergie-grossissant 24 sont accélérés
jusqu'à une vitesse de dérive plus élevée que normales électrons libres dans le
serpentin d'énergie-grossissant 24 serait. Tel que noté ci-dessus, la bobine émettrice 20
est excitée par une alternance de flux d'électrons, ce qui provoque une
inversion périodique du sens de flux d'électrons dans la bobine émettrice 20
(comparer le sens de la flèche 25b en Fig.1C avec le sens de
la flèche 25a en Fig.1b).
Chaque inversion du sens du flux d'électrons dans la bobine émettrice 20,
provoque une inversion correspondante dans le sens de l'accélération des
électrons faible masse dans l'énergie-loupe bobine 24 (comparer le sens
de la flèche 27b dans Fig.1C avec le sens de la flèche 27a
dans la Fig.1b). Chaque telle
inversion en direction de l'accélération provoque un rayonnement correspondant
de photons inductives (jagged flèches 18a, 18b) radialement vers
l'extérieur et radialement vers l'intérieur, respectivement, de l'énergie-loupe
bobine 24. Notez que les flèches 18a
et 18b sont plus grandes que les flèches indiquant les photons inductives
(flèches 22) de la bobine émettrice 20. Cela dénote symboliquement grossissement de
l'énergie. Notez également que, de
l'énergie de photons inductive agrandie rayonnant à partir de la bobine
d'énergie-grossissant 24, presque la moitié est dirigée vers l'intérieur
(flèches 18b), et beaucoup l'autre moitié est réémise vers l'extérieur
(flèches 18a).
En ce qui concerne la bobine d'énergie-grossissant 24,
Fig.2A et la bobine émettrice 20 sont indiqués. La bobine d'énergie-grossissant 24 dans
Fig.2A comprend une bobine interne sortie 28a, que la préférence
se trouve coaxialement à l'intérieur et de la même longueur que la bobine
d'énergie-grossissant 24. Une boucle de travail 48 peut être
connectée aux extrémités de la bobine interne sortie 28a, formant ainsi
un circuit électrique dans lequel une charge 49 est indiquée symboliquement
comme une résistance. La bobine interne
sortie 28 a et les conducteurs de la boucle de travail 48,
préférence sont faits de fils métalliques (cuivre, par exemple).
Fig.2b représente une coupe transversale des bobines
montré Fig.2A. Fig.2B, l'énergie
des photons-inductive agrandie (zone ombrée 19) produit par la bobine
d'énergie-grossissant 24 et réalisé radialement vers l'intérieur vers la
bobine interne sortie 28a, provoque un flux d'électrons oscillant
correspondante dans la bobine interne sortie 28a. Ainsi, la boucle de travail 48 connectée
sur le serpentin interne sortie 28a, est doté d'une plus grande énergie
qu'a été reçu par la bobine d'énergie-grossissant 24 de la bobine
émettrice 20. La direction de
l'écoulement d'électron (flèche 17) dans la bobine interne sortie 28a,
est l'opposé du sens d'écoulement (flèche 27b) dans la bobine
d'énergie-grossissant 24, qui à son tour est l'opposé du sens du flux
d'électrons 25b dans la bobine émettrice 20.
Dans Fig.2B, la zone ombrée en forme annulaire
19 entre la bobine d'énergie-grossissant 24 et la bobine interne sortie 28a,
indique que la quasi-totalité de l'interne dirigée agrandie inductif énergie
des photons (soit environ la moitié de l'énergie de rayonnement total) de la
spirale d'énergie-grossissant 24, est dirigé vers et capturé par, la
bobine interne sortie 28a. En
revanche, le secteur ombragé 16 s'étendant de la bobine
d'énergie-grossissant 24 à la bobine émettrice 20, indique qu'une
proportion relativement faible du rayonnement agrandie 18a dirigé vers
l'extérieur de la bobine d'énergie-grossissant 24 vise l'envoi bobine 20
où le rayonnement fournit un dos-force correspondante. Mis à part la petite quantité de rayonnements
inductifs-photon perdu aux extrémités de la bobine d'énergie-grossissant 24,
la quantité relative de la radiation de photons inductive agrandie (secteur 16)
fournissant la dos-force sur l'envoi de bobine 20, est fonction de
l'angle sous-tendu par le secteur 16, par rapport à la radiation de 360
degrés de la spirale d'énergie-grossissant 24.
Le ratio d'énergie agrandie 18b de la
spirale d'énergie-grossissant 24 et reçue par la bobine interne sortie 28a,
à l'énergie agrandie 18a reçue comme un arrière-force par la bobine
émettrice 20, désigne l'énergie " leverage " atteint par
l'appareil du sujet. Si ce ratio est
supérieur à l'unité, l'énergie de sortie de la bobine interne sortie 28a
dépasse l'apport énergétique à la bobine d'énergie-grossissant 24. Ce levier d'énergie est essentiel pour le
fonctionnement autonome de l'appareil, surtout lorsque l'appareil est utilisé
pour alimenter un. En d'autres termes,
avec un facteur de grossissement énergie suffisamment importante obtenu par
l'énergie-loupe bobine 24, l'énergie électrique disponible dans la
boucle de travail 48, est supérieure à l'énergie d'entrée qui produit
les oscillations dans la bobine émettrice 20. La puissance électrique d'entrée de la bobine
émettrice 20 ainsi produit agrandie énergie électrique dans la bobine
interne sortie 28a qui peut effectuer des travaux utile dans la boucle
de travail 48 en s'allumant la poursuite de l'exploitation de
l'appareil.
Maintenant, on se reportera à la Fig.3, qui représente
schématiquement les aspects de l'appareil 15, responsable de
l'autoproduction d'énergie électrique en utilisant une boucle de
contre-réaction 46. Les conducteurs
de la boucle de contre-réaction 46 peuvent être faites de fil métallique
isolé. (Fig.3, les lignes pointillées 47a et 47b, flèches en
pointillés indiquent que la bobine interne sortie 28a est en fait
positionnée coaxialement à l'intérieur de la bobine d'énergie-grossissant 24,
tel que décrit ci-dessus, mais qu'elle est représentée sur la figure comme
étant à l'extérieur de la bobine d'énergie-loupe pour faciliter
l'illustration). La boucle de
contre-réaction 46, effectue une partie de la puissance électrique de la
bobine interne sortie 28a, retour à la bobine émettrice 20. La portion restante de la puissance
électrique de la bobine interne sortie 28a est réalisée à la boucle de
travail 48 où la puissance est utilisée pour le travail utile 51. Les proportions relatives de puissance de
sortie fournie au feed-back boucle 46 et à la boucle de travail 48,
peuvent varier en ajustant une résistance variable de 50.
Tel que noté ci-dessus, source initiale d'énergie
électrique est utilisée pour " démarrage " de l'appareil 15 en
initiant une oscillation dans la bobine émettrice 20. Après le démarrage, dans des conditions
normales de fonctionnement, l'appareil 15 est en résonance et n'a plus
besoin de l'apport d'énergie de la source initiale. L'inductance particulière et capacité
distribuée de la bobine émettrice 20, plus toutes les autres capacités
et inductances dans l'appareil, fournissent une certaine fréquence
correspondante d'oscillation automatique résonne. Dans la boucle de contre-réaction 46 est
un condensateur 77 qui rend l'appareil un circuit L-C qui oscille à sa
propre fréquence. la fréquence peut être
modifiée en altérant la capacité ou l'inductance de l'appareil, ou les deux. le
condensateur 77 peut être un condensateur variable par lequel la
fréquence peut être ajustée.
Comme illustré à la Fig.3, la source
initiale d'énergie électrique d'oscillation peut être une impulsion d'un
électro-aimant externe 52 propulsé par sa propre source d'énergie (par
exemple une batterie de 53 comme indiqué, ou autre source de courant
continu ou alternatif). Par exemple,
l'électro-aimant 52 peut être placé près de la bobine émettrice 20 ou
une autre partie de la boucle de contre-réaction 46 et alimenté par une
décharge momentanée prononcée à la batterie 53 via un commutateur 57. L'impulsion qui en résulte générée dans
l'électro-aimant 52, déclenche une impulsion électrique correspondante à
la bobine émettrice 20 qui initie les oscillations autosuffisantes dans
l'appareil de 15. Dans un autre
mode de réalisation, l'électro-aimant 52 peut être brièvement alimenté
par une source (non illustrée). Dans un
autre mode de réalisation, la source initiale peut être un aimant permanent qui
se déplace rapidement (mécaniquement ou manuellement) près de la partie bobine 20
ou autre envoi du circuit de contre-réaction. En tout état de cause, l'impulsion fournie
par les initiés de la source initiale électriques oscillations dans l'envoi de 20
qui produisent un rayonnement inductif-photon oscillant correspondant 22
de la bobine émettrice 20 bobine, comme illustré schématiquement à
la Fig.3 de fines flèches dentelées.
Le rayonnement de photons inductive 22 de la bobine émettrice 20
provoque, à son tour, rayonnement d'énergie de photons inductive agrandie 18b
d'électrons de faible masse dans l'énergie-loupe bobine 24, comme le
montre schématiquement à la Fig.3 flèches dentelées épais. Fig.3 représente une photoconducteurs
bobine énergie-grossissant 24 qui est éclairée par un excitateur à
incandescence photoconduction 26 alimenté par sa propre source
d'alimentation 55 (par exemple, une batterie connectée à l'extérieur tel
qu'illustré).
Un facteur de grossissement énergie suffisamment
élevée de l'appareil 15 permet à l'énergie agrandie de la spirale
d'énergie-grossissant 24 pour induire une plus grande énergie dans la
bobine interne sortie 28a, que l'énergie de l'impulsion initiale
correspondante. Une partie de l'énergie
électrique amplifié est retournée à la bobine émettrice 20 via la boucle
de contre-réaction 46 pour soutenir les oscillations.
L'énergie excédentaire restante de la batterie
interne sortie 28 a est disponible pour les applications à un travail
utile par l'intermédiaire de la boucle de travail 48. Dans un mode de réalisation, partie de ce
travail utile peut être utilisé pour éclairer l'excitateur de photoconduction 26
(circuits non illustré) dans une configuration de l'appareil dans lequel
l'énergie-loupe bobine 24 comporte un photoconducteur. Dans un autre mode de réalisation, partie de
ce travail utile peut être utilisé pour maintenir cryogénique (T < Tc)
conditions pour une configuration de l'appareil dans lequel l'énergie-loupe
bobine 24 comporte un semi-conducteur.
Après le démarrage des oscillations dans l'appareil
15, flux d'électrons s'accumule rapidement, tant que la charge 49 ne
tire pas trop de l'énergie émise lors du démarrage. En atteignant l'équilibre d'exploitation, la
production d'énergie électrique de l'appareil 15 est un courant
rapidement alternatif (CA). La sortie ca
peut être corrigée par des moyens conventionnels pour produire le courant
continu (CC), et la sortie peut être réglementée comme désiré, avec des moyens
conventionnels. Nombreuses variantes de
circuits classiques sont possibles, tels que, mais non limité à, les
régulateurs de tension automatiques, contrôleurs de courants, interrupteurs
solénoïdale, transformateurs et redresseurs,
Au sujet de l'énergie-loupe bobine 24, une
incarnation exemplaire peut être faite d'une faible - Tc superconductor comme
fil de zirconium-niobium commercialement disponible, flexible, qui peut être
facilement formé dans une bobine... Autres modes de réalisation, comme indiqué
plus haut, de la bobine d'énergie-loupe 24 peut être faite en utilisant
un matériau photoconducteurs ou un haut - Tc superconductor. Très-haut - Tc supraconducteurs (et certains
photoconducteurs) ont des propriétés comme de la céramique et donc exiger
l'application des méthodes spéciales pour former la matière dans une bobine
cylindrique ayant une continuité électrique tout au long. Certains haut disponible dans le commerce -
supraconducteurs Tc sont disponibles sous forme de ruban ou de ruban
adhésif. La bobine d'énergie-grossissant
24 peut être encastrées ou pris en charge sur un substrat rigide.
A titre d'exemple, une bobine d'énergie-grossissant
24 peut être faite à un ruban de matériaux photoconducteurs souples tels
que le matériel examiné dans brevet nous 6 310 281, partie du présent document
pour référence. En bref, une couche de
métal conforme aux contraintes est placée sur un ruban de plastique. Puis le matériel photoconductrice est déposé
sur les deux côtés du ruban recouverts de métal et les bords du ruban afin que
le ruban est enduit tout le pourtour.
Une telle configuration permet aux électrons de faible masse dans les
matériaux photoconducteurs, pour recevoir, énergie d'inductif-photons émis par
l'envoi a bobine 20 d'un côté du ruban tout en re-rayonnant énergie
agrandie des deux côtés du ruban.
Dans un autre exemple, un ruban flexible
photoconducteur fait de polymère organique flexible ayant des propriétés
photoconducteurs. (Une conductivité électrique élevée observée dans les
polymères photoconductrices est attribuée à la présence d'électrons de faible
masse en la matière). Le ruban
photoconducteurs flexible peut être enroulé sur un support tubulaire
diélectrique, pour former la bobine d'énergie-grossissant 24.
Dans un autre exemple, un revêtement de couche
épaisse de sulfure de cadmium photoconducteurs (CdS) ou le séléniure de cadmium
(CdSe) est formé sur une bobine de fil par frittage sous pâte, qui consiste en
une poudre de finement moulu CdS ou CdSe cristaux mélangé avec de l'eau et au
moins un fluidiser comme le chlorure de cadmium, à une température de 5500 C. à 6000 C dans une atmosphère contrôlée. Pendant le frittage, les limites des petits
cristaux deviennent fondus avec le fluidiser chauffée, ce qui permet des
cristaux à repousser ensemble et se solidifient quand le fluidiser s'évapore et
le revêtement fritté est refroidi.
Alternativement, les oxydes de cuivre sont formés en place sur le cuivre
nu ou fil de bronze en chauffant le fil au-dessus environ 2600 C. dans une
atmosphère d'oxygène, ou par application de produits chimiques oxydants.
Dans un autre exemple, une bobine de comme de la
céramique supraconducteur ou photoconducteur faite par bande-moulage,
extrusion, slip-casting, froid ou pressage à chaud ou couche de la matière
comme un film mince, disposé en spirale sur un substrat diélectrique tubulaire. L'Assemblée est traité thermiquement dans un four à atmosphère contrôlée
pour augmenter les contacts inter cristallines.
Sinon, la couche mince de supraconducteur ou photoconducteur est formée
sur tout l'extérieur du substrat diélectrique, suivi de l'élimination de
certaines parties du supraconducteur ou photoconducteur pour former
l'enroulement hélicoïdal désiré.
Dans certains photoconducteurs et les semi-conducteurs dopés, seulement
une petite partie d'une population de photons inductives irradié sur le matériel,
impact avec et une accélération du rendement, faible masse électrons dans le
matériau. Cela est dû à une faible
densité d'électrons de faible masse photoconducteurs dans le matériau. Dans tel cas, inductif-photon radiation en
passant par le matériel peut être capturée efficacement par les électrons de
conduction libre normale dans une bande métallique qui est souhaitable dans
l'immédiat, contact avec, ou incorporé dans le matériau. L'accélération de la normales électrons libres dans
les conducteurs métalliques, met en place un champ électrique qui aide à
accélérer les photoélectrons de faible masse.
Dans cette configuration, il est souhaitable que les matériaux
photoconducteurs immerger complètement au-dessus et autour de la bande
métallique afin que le photoconducteur donne vers l'extérieur et vers
l'intérieur, avec les deux côtés du photoconducteur ou semi-conducteur dopé
étant en contact électrique avec l'autre.
Un facteur dans le choix du matériau
photoconducteur à utiliser dans la formation de la bobine d'énergie-grossissant
24 est l'amplification possible d'énergie qui peut être réalisé par des
électrons de faible masse d'une matière photoconductrice N-type ou P-type. Autres facteurs importants sont la quantité
d'électrons de faible masse qui sont disponibles dans la documentation
photoconductrice pour une quantité donnée d'éclairage et de la conductance
électrique réelle du matériau.
Éclairage-sensibilité standard mesures fournissent un indice général
global de la capacité d'un photoconducteur à servir efficacement en grossissant
énergie.
Sulfure de cadmium et de séléniure de cadmium,
composés de photoconducteurs les plus courants qui sont disponibles sur le
marché, ont calculé des facteurs d'amplification de 37 et 59,
respectivement. La longueur d'onde de
réponse max. de sulfure de cadmium est 515 nanomètres (dans la partie verte du
spectre visible) et de séléniure de cadmium est 730 nanomètres (dans la partie
infrarouge du spectre). Sulfure de cadmium
peut être mélangé à césium séléniure sous certaines conditions, alors le
mélange obtenu revêt les caractères photoconducteurs entre ces deux
valeurs. Mélanges peuvent être produits
en ayant des longueurs d'onde de pointe qui sont mis en correspondance avec les
longueurs d'onde des LED disponibles dans le commerce de beaucoup de tailles et
d'intensités d'éclairage. Certains
semi-conducteurs qui deviennent photoconducteurs à une longueur d'onde plus
petite que la longueur d'onde produit par les LED actuellement disponibles peut
être faite à la conductrice d'électrons de faible masse simplement par
chauffage.
Demandeur a trouvé que l'arséniure de gallium
développe une conductivité considérablement plus élevée que le cuivre ou
l'argent à une température de 1000 C., et que les électrons de conduction sont
de faible masse. Aussi, le rayonnement
alpha est capable de libérer de nombreux électrons de faible masse dans
certains semi-conducteurs. Un second
électron de masse relativement faible peut avoir été libéré d'Oxyde cuivrique
par rayonnement alpha avec l'électron externe de cuivre dans des expériences
(1915) de Leimer, puisque le grossissement de l'énergie mesurée a dépassé le
grossissement calculé à partir de résonance cyclotron de CuO, qui très
probablement ne porte que sur la masse de l'électron externe.
Dopants peuvent être ajoutés à un semi-conducteur
pour la rendre plus conductrice d'électrons de faible masse sans
illumination. En outre,
l'illumination-sensibilité et la conductivité de sulfure de cadmium sont augmentés
par l'ajout de petites quantités des dopants de type donateurs tels que, mais
non limitées à, les sulfures, séléniures, tellurures, arséniures, antimonides
et phosphures des éléments Type-IIIa : aluminium, gallium, indium et le
thallium. À cet égard, les
photoconducteurs de cellules photovoltaïques haute sensibilité peuvent
comporter jusqu'à cinq différents composés.
Les mélanges réels de composés photoconducteurs et dopants souvent
utilisés dans les cellules photovoltaïques disponibles dans le commerce sont
des secrets commerciaux. Mais, la
sensibilité et la conductance des cellules est habituellement donnée ou est
mesurable, et ces données peuvent être utilisées avantageusement dans le choix
d'un composé particulier photoconductrice pour utilisation dans l'appareil.
Autres photoconducteurs composés ou des éléments
pouvant servir au bobines d'énergie-loupe.
Par exemple, les électrons de conduction du silicium ont un facteur
d'énergie-grossissement de 15 fois.
Photoconducteurs ayant des facteurs de très fort grossissement incluent,
mais ne sont pas limité à, l'arséniure de gallium, phosphure d'indium,
antimoniure de gallium, arséniure de cadmium et d'étain et arséniure de
cadmium, qui ont calculé l'énergie-grossissement facteurs variant entre 200 et
500 fois et séléniure de mercure (1100 fois), arséniure d'indium (2000 fois),
tellurure de mercure (3400 fois) et l'antimoniure d'indium (5100 fois).
La profondeur de transmission optique détermine en
grande partie l'épaisseur optimale de films photoconducteurs pour bobines
énergie-loupe. Par exemple, la plus
haute transmission optique de CdS est signalée comme 20 micromètres, mais étant
donné que la taille de grain moyen augmente (et diminue la porosité moyenne)
avec une augmentation de l'épaisseur du film, la conductivité maximale d'un
film fritté est sur une épaisseur de 35 microns (J. S, Lee et al., 1987).
Le métal choisi pour être embarquée ne doit pas
réagir chimiquement avec le photoconducteur.
Par exemple, aluminium réagit avec l'arséniure de gallium (GaAs) dans un
environnement électrique, de changer le caractère conducteur de l'aluminium et
le GaAs. Or, platine et palladium
peuvent servir dans de nombreux cas, parce que ces matériaux est relativement
inertes chimiquement. Or combine
chimiquement avec le tellure, toutefois, or n'est pas adapté pour l'enrobage en
tellurure de mercure. Cadmiage au cours d'un métal commun sert à soulager la
réactivité dans les cas où le sulfure de cadmium ou de séléniure de cadmium est
utilisé comme le photoconducteur.
L'analyse qui précède a été, pour faciliter
l'explication, dans le cadre de l'appareil, y compris l'énergie-loupe une
bobine 24. Toutefois, comme nous
l'avons, utilisation d'une seule énergie-agrandissement bobine 24 pour
capter les photons inductives de la bobine émettrice 20, résultats en
perte (par non-capture) de la plupart des photons inductives de la bobine
émettrice 20. Cette proportion de photons inductives
capturées peut être augmentée considérablement dans un mode de réalisation dans
laquelle plusieurs bobines d'énergie-grossissant 24 entourent presque
totalement l'envoi bobine 20, comme illustré à la Fig.4. Dans cette réalisation, les bobines
d'énergie-grossissant 24 entourent presque totalement la bobine
émettrice 20, et (bien que l'énergie-grossissant six bobines 24 figurent)
aussi peu que trois bobines énergie-grossissant 24 de diamètre
suffisant, encore pourraient presque complètement entourent l'envoi bobine 20. Il n'y a aucune limite, sauf comme
possiblement liés aux préoccupations de l'emballage, le nombre maximal
d'énergie-agrandissement bobines 24 qui pourraient être utilisées. La
configuration illustrée de Fig.4, possède un nombre souhaitable
d'énergie-grossissant six bobines 24.
Fig.4, les secteurs ombragés 31, considérés
collectivement, montrent que presque tous les 360 degrés des rayonnements de
photons inductive 22 de la bobine émettrice 20, sont reçus par
l'énergie-grossissant des bobines 24.
Non illustré Fig.4 excitateurs photoconduction (articles 26 à
la Fig.3) servent pour éclairage portions respectives des bobines
énergie-grossissant 24 sous une forme photoconductrice de l'appareil 15.
Fig.4 dépeint également bobines de sortie interne
correspondante 28 a imbriqué coaxialement et co-largement à l'intérieur
de chacun de l'énergie-loupe bobines 24.
Tel que discuté précédemment, chaque bobine interne sortie 28 a
reçoit presque tous le rayonnement inductif-photon se propageant radialement
vers l'intérieur de la spirale de l'énergie-loupe respectif 24. De préférence, la production globale d'énergie
de l'incarnation de la Fig.4, peut être augmentée en entourant le
tableau des bobines d'énergie-grossissant 24 avec une bobine de sortie
externe 28b, dont les conducteurs de préférence sont faits de fils
métalliques isolés (Fig.5). Dans
cette réalisation, environ la moitié de la propagation vers l'extérieur
magnifiée inductif-photon radiation (grandes flèches 18) de chaque
bobine d'énergie-grossissant 24 (une telle bobine est mis en évidence à
la Fig.5) est reçue par la bobine de sortie externe 28b. Ce rayonnement capturé est dénoté par le
secteur ombragé 35. Quand cela
extérieurement réalisé des rayonnements inductifs capturées à partir de toutes
les bobines d'énergie-grossissant 24 est ajouté à tous le rayonnement
dirigé vers l'intérieur, capturé à partir de l'énergie-loupe bobines 24 par
leurs bobines de sortie interne 28a, 28b, dépasse largement l'énergie
dos-force réalisé par les bobines d'énergie-grossissant 24 vers la
bobine émettrice 20 (l'énergie du dos-force de l'énergie-loupe une
bobine 24 apparaît comme le secteur ombragé, 16). Ainsi, l'énergie qui en résulte "
démultiplier " exposé par l'appareil augmente considérablement en incluant
la bobine de sortie externe 28b.
L'incarnation de la Fig.5 comprend également des tableaux
respectifs (lus long) de diodes électroluminescentes (LEDs) agissant
collectivement comme photoconducteur excitateurs 26 pour les bobines
d'énergie-grossissant 24. Les baies de la
LED sont disposées dos à dos et disposé entre les spires adjacentes
d'énergie-loupe 24. Chaque tableau Fig.5 peut comporter
plusieurs
Fig. 6 fournit une vue en perspective d'appareillage 15 ayant un
arrangement de rouleaux semblables à l'arrangement montré à la Fig.5. De la Fig.6, chaque bobine
d'énergie-grossissant 24 comprend une bobine hélicoïdale de matériaux
supraconducteur ou photoconducteurs en fil ou ruban (ruban) forme.
Lorsque plusieurs bobines
d'énergie-grossissant 24 sont utilisées, les directions respectives des
flux d'électrons en eux se produisent préférence dans la même direction
circulaire comme lus long. Ainsi, le
flux d'électrons dans toutes les bobines d'énergie-grossissant 24 est
vers la droite au cours d'une phase d'un cycle d'oscillation et vers la gauche
pendant la phase d'autre. Le même
principe s'applique à la circulation des électrons dans les bobines de sortie 28a,
28b. (Mais, dans une telle réalisation, le flux d'électrons dans la sortie
bobines 28a, 28b, est dans la direction opposée pour le flux des
électrons dans les bobines d'énergie-grossissant 24). Ces relations du flux d'électrons dans les
bobines pendant une phase particulière d'un cycle d'oscillation, figurent la Fig.7.
Les bobines
d'énergie-grossissant 24 préférence sont reliés entre eux en série, en
utilisant des connecteurs inter-bobines 30a, 30b, de maintenir le même
sens du flux d'électrons, qui peut être dans le sens horaire ou antihoraire
(tel que vu depuis une extrémité de telle une bobine).
Cette direction du flux
d'électrons dans une bobine est appelée le " gaucher/droitier " de la
bobine. Si l'énergie-loupe bobines 24
ont tous le même caractère gaucher ou droitier, puis les extrémités des
bobines d'énergie-loupe adjacentes 24 sont reliées entre eux d'une
manière de tête-à-pied progressivement dans une seule direction autour du
groupe de bobines (non illustré).
(" Tête " se réfère à la fin de la face, et " pied "
se réfère à la fin du dos à la route de l'appareil par rapport à
l'observateur). Dans ce cas, les
connecteurs inter-bobines 30a, 30b, doit passer complètement par
l'intermédiaire de l'appareil ou sur le pourtour extérieur de l'appareil sur
toute sa longueur, ce qui réduit l'efficacité et peut causer une usure
indésirable si les connecteurs sont soumis à des vibrations. Un arrangement plus souhaitable est représenté dans la Fig.6,
dans quels connecteurs inter-bobines courtes 30a, croisement directement
face à face entre une énergie-loupe bobine 24 et une énergie
adjacente-loupe bobine sur connecteurs inter-bobines 24 et courts 30b
traverser directement le pied-à-pied dans les bobines d'énergie-loupe prochains
24. Dans cette configuration, le
gaucher/droitier de tours de l'énergie-loupe bobines 24 suppléants de
droite à gauche à gauche à droite en énergie-loupe adjacente bobines 24. De la même manière comme une droite vis
avance de la tête aux pieds comme il est tourné vers la droite, et une vis pour
gauchers se déplace dans la direction opposée, le flux des électrons dans le
sens horaire dans une bobine droite avances de la tête aux pieds, et l'écoulement
des électrons dans le sens horaire dans une bobine gaucher avances du pied à la
tête.
La sortie interne seule
couche bobines 28a de la Fig.6, présenter la même situation dans
laquelle ces bobines sont connectées en série.
De préférence, les connecteurs inter-bobines 32a traverser
directement depuis une bobine interne sortie 28a à la sortie interne
adjacente bobine 28a, face à face et les connecteurs inter-bobines 32b
traverser directement pied-à-pied de bobine une sortie interne 28a à la
bobine du côté sortie interne 28a.
Cette même convention gaucher/droitier s'applique généralement à toutes
reliées en série des bobines de sortie interne 28a relié de cette
manière. Les tête-à-tête inter-bobine connecteurs 32 a et pied à pied les
connecteurs inter-bobines 32b pour la sortie interne bobines 28a,
besoin ne coïncident pas avec les mêmes connecteurs respectifs 30a, 30b
pour les bobines d'énergie-grossissant 24.
Dans un autre mode de réalisation (non
illustré), chaque bobine de sortie interne est deux couches, avec les deux fils
à la tête ou du pied. Une telle
configuration permet des connexions courtes et directes entre spires adjacentes
sortie interne. Bobines de multiples
couches de sortie interne peuvent être plus efficaces, mais les couches
supplémentaires de fil d'une augmentent de la masse de l'appareil, ce qui peut
poser problème dans les applications mobiles.
Des couches multiples de fil transportant un courant élevé peuvent aussi
entraîner une surchauffe, qui peuvent nécessiter que peu d'espace être laissé
entre chaque bobine interne sortie 28a et son enroulement environnante
d'énergie-grossissant 24 pour accueillir une ou plusieurs conduites d'un
liquide de refroidissement dans l'appareil (à un sacrifice de quelque
efficience). Le liquide de refroidissement
peut être, par exemple, à air pulsé (dans le cas de photoconducteurs ou
semi-conducteurs dopés) ou liquéfié cryogénique (dans le cas des
supraconducteurs).
Fig.6 montre
également deux conducteurs extérieurs 34 connectés à sortie interne
correspondante bobines 28a.
Électrons traversent les internes et les conducteurs 34 sortie
bobines 28a en série. En outre,
deux conducteurs extérieurs 36 sont connectés à des extrémités
respectives de la bobine de sortie externe 28b, et deux conducteurs
extérieurs 38 sont connectés aux extrémités respectives de la bobine
émettrice 20.
Fig.7 est une vue de l'extrémité schématique de l'appareil Fig.6,
montrant la direction relative des flux d'électrons dans les différentes
bobines et dans les connexions inter-bobines décrites pour bobines simple
couche. À une phase particulière
d'oscillation, le flux des électrons dans le sens horaire indiqué par la flèche
39 a dans la bobine émettrice 20 induit des flux d'électrons dans
le sens horaire 39b dans toutes les bobines d'énergie-grossissant 24. Le rayonnement agrandi du flux d'électrons
dans le sens horaire dans les bobines d'énergie-grossissant 24, induit
des flux d'électrons dans le sens antihoraire à l'interne sortie bobines 28a,
comme indiqué par les flèches 39c.
Le flux des électrons dans le sens antihoraire, indiqué par la flèche 39d,
dans la bobine de sortie externe 28b est opposé en direction de
l'écoulement d'électron dans l'énergie-loupe bobines 24.
Le flux d'électrons
dans la inter-bobines connecteurs 30a s'étendant entre spires adjacentes
d'énergie-grossissant 24 est indiqué par les flèches 39f et
l'électron écoulement dans la inter-bobines connecteurs 32a s'étendant
entre les spires adjacentes sortie interne 28 bis est indiqué par les
flèches 39f. Au cours de la
prochaine phase de l'oscillation, toutes les flèches de direction montrés la Fig.7
inverse.
Relier les bobines de
sortie interne 28a ensemble dans la série a est avantages si l'on veut
maximiser la tension de sortie de l'appareil 15. Alternativement, les bobines de sortie
interne 28a peuvent être reliés entre eux en parallèle si l'on veut
maximiser le courant électrique de sortie de l'appareil 15 tout en
minimisant la tension de sortie. Dans
cette configuration alternative, toutes les bobines de sortie interne 28a
préférence sont enroulées avec le même caractère gaucher ou droitier, avec
chaque bobine 28a deux respectifs ayant conduit. Les fils à une extrémité (par exemple, le
pied de lit) des bobines 28a sont reliés entre eux et les fils à l'autre
extrémité (la tête de ligne) des bobines 28a sont reliés entre eux. Le système parallèle-bobine qui en résulte
est relié d'une manière conventionnelle dans les autres circuits de l'appareil
(non illustré).
Outre alternativement,
les bobines de sortie interne 28a peuvent être connectés ensemble afin
de fournir plus d'un circuit de sortie (à condition qu'une énergie suffisante
est produite pour servir de rétroaction à la bobine émettrice 20 et
devant servir à établir des conditions favorables pour la production
d'électrons de faible masse abondantes).
Alternativement, la relatives ou les tensions élevées et des courants de
puissance de sortie peuvent varier en modifiant le rapport entre le nombre de
tours dans les bobines d'énergie-grossissant 24 pour le nombre de tours
à l'intérieur des bobines de sortie 28a.
Sinon encore une fois,
les bobines d'énergie-grossissant 24 peuvent être employées de manière
séparée pour fournir plus d'une unité d'énergie-loupe. Chaque unité est constituée par une ou plusieurs
bobines d'énergie-loupe capable de servir son circuit respectif des bobines de
sortie interne.
Les deux conducteurs 36
reliées à la bobine de sortie externe 28b, peut être connecté à la
sortie interne bobines 28a, ou peut être utilisé (sans être connecté à
l'intérieur des bobines de sortie 28a) avec seulement la bobine de
sortie externe 28b à fournir un circuit de sortie indépendants (non
illustré). Les deux conducteurs 38 reliées
à la bobine émettrice 20, sont reliés dans la boucle de contre-réaction
46 tel que l'électron circule dans la bobine émettrice 20 dans la même
direction circulaire comme dans la sortie interne bobines 28a.
Fig.8 représente encore un autre mode de réalisation de l'appareil 15,
dans laquelle chaque énergie grossissant bobine 24 comporte une couche
mince ou épais film d'un polycristallin ou autre photoconducteur approprié
déposés de façon hélicoïdale directement sur un substrat tubulaire 40 de
préférence en céramique ou autre matériau diélectrique approprié. Sur chaque bobine grossissant énergie 24,
le photoconducteur polycristallin est formé comme une bande hélicoïdale à
l'extérieur du substrat tubulaire 40.
La bande hélicoïdale du photoconducteur peut inclure une couche mince de
métal imbriquée. Dans certains cas, bobines
inter connexions entre énergie côté grossissant 24 peuvent être faites
en étendant le photoconducteur déposé depuis les hélices 44 situés aux
extrémités des substrats tubulaires 40 et s'étendant vers les zones de
contact bobines contact zones 44 sur adjacentes tubulaire substrats 40. Contact électrique entre l'énergie côté
grossissant bobines 24 fait sous une pression modérée par les zones de
contact 44, qui sont affichés dans la Fig.8. Pour distinguer les zones de contact
individuels 44, ils apparaissent en position séparée avant d'être
pressées ensemble pour faire contact.
Pour maintenir l'intégrité des zones de contact 44, l'énergie
grossissant bobines 24 peut être tenu ensemble à proximité de mutuelle
par une des diverses fixations non métalliques d'établir un contact électrique
continu entre toutes les parties photoconductrices. Par exemple, les boulons 43 et noix 45
faites d'un plastique tels que le nylon, ou autre matériau diélectrique,
peuvent être utilisés. Une autre
variante consiste à maintenir la pression de contact d'une bobine à l'autre au
moyen de pinces à ressort. Ainsi, dans
un mode de réalisation, les serpentins grossissant énergie 24 sont
connectés afin d'être en contact sans fin entre eux, avec aucune coupure
capacitive entre eux. Le reste de
l'appareil peut être construit de la même manière que le photoconducteur ou
semi-conducteur dopé incarnation décrit ci-dessus, dans lequel on observe la
même attention à la direction du flux d'électrons en bobines respectifs.
La configuration de la
bobine d'un autre mode de réalisation est indiquée dans les Fig.9A et Fig.9B. Un substrat tubulaire 40, prend en
charge un film hélicoïdal, mince ou film épais, dipôle-type d'énergie-loupe
bobine 24 qui est imbriqué à l'intérieur et coaxiale avec une bobine de
sortie externe unique 28b.
Imbriqués à l'intérieur du substrat tubulaire 40 et avec des axes
respectifs parallèles à l'axe du substrat tubulaire 40, est un envoi en
spirale 20 et une bobine interne sortie 28a. La bobine émettrice 20 et la sortie
interne bobine 28a, sont placés sur les côtés opposés d'un séparateur
métallique réfléchissante 59. Le
séparateur de 59 est substantiellement parabolique en coupe transversale
dans toute son étendue axial et est placé de sorte que les bords longitudinaux
sont toucher ou presque toucher, le substrat tubulaire 40. Le séparateur de 59 peut être composé
de métal commun, non magnétiques tels que l'aluminium ou de magnésium. La bobine émettrice 20 est positionnée
sur le côté concave du séparateur 59, avec l'axe de la bobine émettrice 20
étant placée au foyer 60 géométrique de la parabole et disposés
parallèlement à l'axe de la bobine d'énergie-grossissant 24. La bobine d'énergie-grossissant 24 dans cette réalisation,
comprend une couche mince ou épais film photoconducteur formé en spirale sur le
substrat tubulaire 40. Un
excitateur de photoconduction 26 est positionné à l'intérieur du
séparateur 59. (Le substrat
tubulaire 40, faite d'un matériau rigide qui est transparent aux
radiations produites par l'excitateur de photoconduction 26). Toutes les autres formes de la bobine
d'énergie-grossissant 24 tel que décrit aux présentes, y compris la
forme supraconducteur, peuvent être employées dans cette réalisation.
Le séparateur 59, répond à un double
objectif. Un des objectifs est pour
l'orienter vers la bobine d'énergie-grossissant 24 la part du
rayonnement inductif-photon 22 qui n'est pas autrement dirigé vers le
séparateur, comme l'attestent les rayons reflétés-photon 61 dans Fig.6A. (Réflexion de ces photons rayonnées ne change pas
la directionnalité de la force transversale qui véhiculent ces photons). Un autre séparateur 59 vise à servir
de bouclier pour limiter la quantité de rayonnement vers l'intérieur 18b
de la bobine d'énergie-grossissant 24 qui est retournée comme un
arrière-force vers la bobine émettrice 20. Le rayonnement arrière-force restreint est montré par la partie ombrée 63
dans Fig.9B.
La part du rayonnement de photons inductif
dirigé vers l'intérieur, agrandie 18b qui est reçue par la bobine
interne sortie 28a, est symbolisé par la partie ombrée 65. La quantité proportionnelle de rayonnement agrandie
dirigé vers l'extérieur 18a de la bobine d'énergie-grossissant 24 qui
est reçue par la bobine de sortie externe 28b, est indiquée par la
partie ombrée 67. La somme de
rayonnement magnifiée dans la zone 65 qui atteint la bobine de sortie
externe 28b, dépassant sensiblement le rayonnement magnifié dans la zone
63 (la portion ce dernier comme un arrière-force sur la bobine émettrice
20). Cet excédent d'énergie
utilisée sur le dos-force de l'énergie, permet l'énergie. Cette réalisation comprend également un
mécanisme de départ et la source d'alimentation initiale pour l'excitateur de
photoconduction, une boucle de travail et une boucle de rétroaction (non
illustré) tel que prévu dans les autres modes de réalisation décrits ci-après.
Certaines caractéristiques peuvent être
incorporés avec l'un des modes de réalisation décrits ci-après, pour ajouter la
fonctionnalité fonctionnelle. Par exemple, se
référant à la représentation schématique d'une configuration de bobine montrée
en vue de l'extrémité en Fig.10A, un noyau ferromagnétique 69 peut
être placé à l'intérieur de la bobine émettrice 20, et noyaux
ferromagnétiques 71 peut placés dans respectifs interne sortie bobines 28a. Ces carottes augmentent l'inductance de
l'appareil, ce qui réduit la fréquence des oscillations électriques produites
par l'appareil. Même si des
augmentations inductance peuvent provoquer la tension de sortie et le courant
d'être hors de phase, la différence de phase peut être corrigée par l'ajout de
capacité pour les circuits par des moyens conventionnels. Est également présentée, un bouclier
métallique externe qui entoure complètement l'appareil pour bloquer le
rayonnement de l'appareil qui pourrait interférer avec les radios, télévisions,
téléphones, ordinateurs et autres appareils électroniques. le bouclier peut
être constitué de le quelconque des divers métaux non magnétiques tels que
l'aluminium ou de magnésium.
Un autre moyen
d'accroître l'inductance de l'appareil est indiqué dans Fig.10B, qui est
une variante de la vue de l'extrémité de juste la bobine émettrice 20 qui
est dépeint dans Fig.10A. Dans Fig.10B,
un manchon ferromagnétique 73 est placé coaxialement autour de la bobine
émettrice 20.
Les ratios de
dimensions respectives des diverses composantes restent généralement semblables
à l'égard de l'autre pour les tailles des appareillages différents, à
l'exception de la dimension longitudinale, qui peuvent généralement être plus
court ou aussi longtemps que désiré, jusqu'à une limite pratique. Les jauges respectifs des fils utilisés dans
la bobine émettrice 20 et les bobines de sortie 28a et 28b, sont
proportionnels avec le courant électrique porté par ces fils, et l'épaisseur
respective de l'isolant (si utilisé) sur les fils est proportionnelle à la
tension.
Le diamètre extérieur
des bobines de sortie interne 28a n'est souhaitable que légèrement
inférieure à l'intérieur de l'énergie respectif-loupe de diamètre bobines 24,
comme illustré à la Fig.6, Fig.7 et Fig. 8, assurant ainsi la proximité
immédiate de chaque bobine interne sortie 28a avec son enroulement
respectif d'énergie-grossissant 24.
À un sacrifice à l'efficacité, le diamètre extérieur des bobines
internes sortie 28a peut être fait plus petit, pour laisser un espace
pour la chaleur des fils courant d'échapper ou d'être enlevée par un
réfrigérant tel que l'air forcé dans le cas d'un type de photoconducteur ou un
appareil de type semiconducteur dopé, ou par un cryogénique liquéfié dans le
cas d'un appareil de type supraconducteur.
Aussi, de préférence,
la bobine de sortie externe 28b est connectée en série avec l'interne
sortie bobines 28a afin d'optimiser la tension de sortie de l'appareil 15
et pour minimiser la chaleur produite par les courants électriques dans
l'appareil. La tension de sortie peut
être quitte son poste et le courant électrique de sortie s'avança vers les
plages de fonctionnement normales à l'aide d'un transformateur, dans lequel le
primaire du transformateur se composerait de la charge dans la boucle de
travail 48.
Comme indiqué plus
haut, chaque bobine d'énergie-grossissant 24 peut comporter un
photoconducteur ou semi-conducteur dopé formé comme un motif hélicoïdal sur un
substrat tubulaire à paroi mince respectif fourni avec des surfaces de contact
prolongés, soulevées à chaque extrémité.
Les bobines d'énergie-grossissant 24 préférence sont connectées
électriquement (plutôt que capacitatively) les uns aux autres en série sur les
surfaces de contact élevés. Les bobines
photoconducteurs préférence sont recouverts à l'aide de vernis transparent ou
d'un émail d'isolation électrique et de protéger les photoconducteurs de
l'oxydation et aux intempéries.
Où les électrons de
faible masse photoconductrices dans les bobines d'énergie-grossissant 24 sont
présents à une concentration qui est insuffisante pour capturer la plus grande
partie du rayonnement inductif-photon de la bobine émettrice 20, chaque
bobine énergie-loupe a préférence comprend une bande métallique mince. Le métal est souhaitable en contact intime
avec le transporteur de faible masse-électron. le métal peut être à l'extérieur
d'un semi-conducteur dopé, ou qu'il peut être incorporé dans une bande de
photoconducteur de la bobine pour capturer le rayonnement inductif et mettre en
place un champ électrique qui, à son tour, contribue à accélérer les électrons
de faible masse. Dans la réalisation de photoconducteurs, les matériaux
photoconducteurs préférence sont disposé tout autour de la bande métallique
afin que les électrons de faible masse sont menées sur le côté extérieur ainsi
que le côté intérieur et les bords de la bande photoconducteurs sur la partie
ou les parties qui sont exposés à un éclairement à l'extérieur. La largeur de la bande métallique préférence
suffit de capturer autant de rayonnement inductif-photon de la bobine émettrice
qu'il est possible, étant donné que les écarts entre les tours de Metal dans la
bobine de l'énergie-loupe permettent le rayonnement inductive de la bobine
émettrice à transmettre à la bobine de sortie interne. Étant donné que le rayonnement de la bobine
émettrice est un demi-cycle déphasée avec le rayonnement inductif de
l'électrons de faible masse, tous le rayonnement de bobine émettrice qui
atteint la bobine de sortie, réduit l'efficacité de la sortie de l'appareil.
Matériaux
photoconducteurs appropriés (p. ex., le sulfure de cadmium, séléniure de
cadmium) pour former les bobines d'énergie-grossissant 24 sont
disponibles dans le commerce. Les
matériaux photoconducteurs peuvent être un seul matériau ou un mélange de
matériaux et peuvent être formé par, par exemple, pulvérisation
cathodique. Un mélange de sulfure de
cadmium et de séléniure de cadmium peut être ajusté de façon optimale pour
rendement énergétique-loupe bobines présentant des facteurs d'énergie-loupe
maximales à une longueur d'onde du pic correspondant aux plus brillantes
excitateurs de photoconduction 26 qui sont disponibles.
En ce qui concerne les
excitateurs de photoconduction 26, photo-excitation de l'énergie-loupe
bobines 24 peut être pourvu par un ou plusieurs LEDs, émettrices de
surface ou générant des bord, par exemple, sélectionnée pour produire une
longueur d'onde de sortie correspond à la longueur d'onde de photoconduction
pic des bobines énergie-grossissant 24.
Dans la réalisation de Fig.7 et Fig.10A, individuels 26 LEDs
sont positionnées dans des matrices linéaires montés dos à dos sur les barres
de fixation respectifs. Les barres de fixation assemblé avec LED sont placés
dans les intervalles entre spires adjacentes d'énergie-loupe 24 pour
éclairer au moins les côtés des respectifs énergie-loupe bobines 24 qui
reçoivent un rayonnement inductif-photon la bobine émettrice 20. Les LED sont avantageuses par rapport aux
lampes à incandescence car les LED produire plus de lumière avec moins de
chaleur et ont une durée de vie beaucoup plus opérationnelle que les lampes
incandescentes. LED sont également
privilégiées en raison de leur petite taille qui facilite le montage d'un grand
nombre d'entre eux dans l'espace relativement faible entre les spires
adjacentes d'énergie-loupe 24.
Références citées dans le texte
Helmholtz, H., 1847, Uber die Erhaltung
der Kraft, G.A.Reimer,
Leimer, E., 1915, “Uber Radiumantennen”,
Elektrotechnische Zeitschrift, Heft 8, Feb. 25, 1915. English translation: “On Radium Antannae” The
Electrician, Apr. 21 1916, and “Radium and Aerials” Scientific American,
Supplement No. 2127, Oct. 7, 1916.
Anon, 1919a, “Youthful Seattle Inventor and
his Invention” (photos and captions), Seattle Post-Intelligencer, Dec.
17, 1919.
Anon., 1919b, “Youth’s Revolutionary
invention is Backed by Professor - Hubbard’s New Energy No Fake, Says Seattle
College Man”, Seattle Post-Intelligencer, Dec. 17, 1919,
Anon. 1920a, “Hubbard Coil Runs Boat on
Anon., 1920b, “Drives Boat with New Electric
Generator” (photos and captions), Seattle Post-Intelligencer, Jul. 29,
1920.
Anon., 1928a, “Noted Flyers Try Out New
Motor at Selfridge Field” (photo), Detroit Free Press, Fen. 25, 1928.
Anon., 1928b, “Fuelless Motor Shown; Gets
Current From Air”,
White, H. C., 1928c, “Lindbergh Tries Motor
Earth Runs”,
Anon., 1928d, “Fuelless Motor Impresses
Experts”, New York Times, Feb. 26, 1928.
Anon., 1928e, “No-Fuel Motor Finds Backers”,
Anon., 1928f, “Fuelless Motor Is A
Generator”, New York Times, Feb. 27, 1928.
Anon., 1928g, “Fuelless Motor Ends 2-year
Task”, Seattle Post-Intelligencer, Feb. 27, 1928.
Bermann, R. B., 1928 h, “Hubbard Believes
Mystery Motor Based Upon His Own Invention”,
Ampere, A. M., 1820,
“Memoire”, Annales de Chimie et de Physique.
Ampere, A. M., 1825,
“Memoire”, Annales de Chimie et de Physique.
Weber, W., 1846, Elektrodynamische
Maassbestimmungen, Weidmann’sche Buchhandlung,
Gauss, C. F., 1835, unpublished notes
originally published posthumously in 1865 as “Grundgesetz Fur Alle
Wechselwirkungen Galvanisvcher Strome” in Werke, Vol. 5, pp. 616-620; the
correspondence from Gauss to Wilhelm Weber (1845) is on pp. 627-629.
Maxwell, J. C., 1873, A Treatise on
Electricity and Magnetism, Clarendon Press,
Larmor, J., 1897, “On the Theory of Magnetic
Influence of Spectra; and on the Radiation From Moving Ions”, Phil. Mag LXIII:503-512.
Larmor, J., 1900, Aether and Matter,
Rutherford, E., 1911, Phil. Mag.
XXI:669.
Planck, M., 1911, Verh. D. Deutsch. Phys.
Ges. XIII:138
Bohr, N., Kramers, H. A., and Slater, J. C.,
1924, Phil. Mag. XLVII:785
Whittaker, E., 1951, A History of the
Theories of Aether and Electricity, Thos. Nelson & Sons,
Shpenkov, G. P., and Kreidik, L. G.,
“Microwave Background Radiation of Hydrogen Atoms”, Revista Ceencias Exastas
e Naturais 4, n.1, pp. 9-18, January/June 2002.
Fowler, W. A., 1983, “Experimental and
Theoretical Nuclear Astrophysics; the Quest for the Origin of the Elements”,
Nobel Lecture, Dec. 8, 1983.
Tifft, W. G., 1976, “Discrete States of
Redshift and Galaxy Dynamics I", Astrophysical Journal 206:38-56.
Tifft, W. G., 1977, “Discrete States of
Redshift and Galaxy Dynamics I
I: Systems of Galaxies”, Astrophysical
Journal 211:31-46; and “Discrete States of Redshift and Galaxy Dynamics I I I: Abnormal Galaxies”, Astrophysical Journal 211:377-391.
Compton, A. H. and Allison, S. K., 1935,
“X-Rays in Theory and Experiment” 2nd Ed.,
Pops, H., 1997, “The Metallurgy of Copper
Wire”, Innovations, Dec. 1997 (Copper Development Assoc.).
Lapp, R. E. and Andrews, H. L., 1954, Nuclear
Radiation Physics, Prentice-Hall,
Bardeen, J., 1942, “Theory of
Superconductivity” (abstr.), Phys. Rev. 59:298.
Dehmelt, H. G., 1989, “Experiments with an
Isolated Subatomic Particle at Rest”, Nobel Lecture, Dec. 8, 1989.
File, J. and Mills, R. G., 1963,
“Observation of Persistent Current in a Superconducting Solenoid”, Phys.
Rev. Lett. 10(3), Feb. 1, 1963.
JOHN REARDON:
GÉNÉRATEUR DE COURANT ALTERNATIF
Brevet américain 6 946 767 20 septembre 2005 Inventeur: John Reardon
GÉNÉRATEUR DE COURANT ALTERNATIF
Il s'agit d'une forme remaniée extrait ce brevet qui montre un haute
efficacité générateur électrique de courant alternatif. Il est précisé que
cette conception du générateur n'est pas affectée par la Loi de Lenz et les
résultats expérimentaux a montré une amélioration de 13,713 % au-dessus du
rendement de puissance conventionnelle.
RÉSUMÉ
Un générateur électrique de courant alternatif crée
trois différents et distincts des champs magnétiques entre plaie spiralés et
magnets tournants, deux domaines qui sont des champs induits causés par la
rotation de l'aimant. Une pluralité des aimants sont placés tels
qu'ils s'étendent vers l'extérieur d'un axe de rotation. Les aimants sont espacées
circonférentiellement autour de l'arbre, tel que le terminal Nord polaire d'un
aimant fait suite à l'extrémité sud polaire de l'aimant prochaine ou telle que
l'extrémité polaire d'un aimant fait suite à un aimant avec la même extrémité
polaire. Une pluralité d'éléments
tubulaires fixes sont positionnés relativement espacés les aimants. Les éléments en spirale chaque ont des
enroulements électriques et noyaux métalliques qui s'étendent les longueurs des
éléments bobine. Les aimants tournent
relativement espacées aux extrémités des éléments de telle sorte que les lignes
de flux des aimants coupent les carottes situés au centre de chacun des éléments
bobine bobine. Ceci induit alternatif
courant électrique qui oscille dans les deux sens le long de la longueur des
carottes. Ce brassage oscillant crée un
développement et réduction d'ensemble de lignes de flux magnétique qui se
dilatent et se contractent à travers chaque centimètre des enroulements de
l'élément de bobine. Ce développement et
réduction de champ magnétique induit un champ magnétique en expansion et
s'effondrant et un champ électrique alternatif dans les éléments en spirale.
Références de brevet US
:
4009406 Feb,
1977 Inariba.
4823038 Apr,
1989 Mizutani et al.
5696419 Dec,
1997 Rakestraw et al.
5821710 Oct, 1998 Masuzawa et al.
5973436 Oct, 1999 Mitcham.
6069431 May, 2000 Satoh et al.
6373161 Apr, 2002 Khalaf.
6462451 Oct,
2002 Kimura et al.
6541877 Apr,
2003 Kim et al.
6717313 Apr,
2004 Bae.
CONTEXTE DE
L'INVENTION
Générateurs de courant
alternatif sont des dispositifs qui convertissent l'énergie mécanique en
énergie électrique. Pour générer une
force électromotrice de mouvement mécanique, il doit y avoir mouvement entre
une bobine électrique et un champ magnétique d'une manière qui entraîne une
modification du flux qui traverse la bobine.
Fondamentalement, la force électromotrice induite est provoquée par un
changement dans le flux traversant la bobine.
L'utilisation
d'électro-aimants, aimants et composants magnet dans les générateurs pour créer
le champ magnétique et ses effets ultérieurs sur des bobines électriques pour
générer en fin de compte courant électrique est bien connue. Ces générateurs magnétiques, fonctionner en
utilisant les forces repoussant créées par l'effet de l'évolution des polarités
de permanent et des électro-aimants. Par
exemple, il y a électriques générant des dispositifs qui emploient des électro-aimants
qui étant en position fixe et qui induisent l'actuel en étant excité
sélectivement, comme le fer ou autres disques métalliques magnétiques, des
barres ou des éléments analogues sont pivotés à ou autour de l'aimant. Autres systèmes emploient électro-aimant ou
aimants permanents superposées et décalées, par divers moyens, en ce qui
concerne les noyaux de fer ou de bobines, induisant un courant électrique
alternatif dans les bobines.
Cependant, les alternateurs préalable qui
emploient des systèmes d'aimant rotatif sont inefficaces et généralement ne
parviennent pas à fournir un courant suffisant, en ce qui concerne l'effort
mécanique appliqué.
RÉSUMÉ DE
L'INVENTION
C'est donc un objet de
la présente invention pour pallier les lacunes et les inconvénients des
générateurs de courant électriques alternatifs préalables.
C'est un objet de la
présente invention de fournir un générateur de courant alternatif qui génère
une quantité importante de courant électrique avec efficience et efficacité.
C'est un autre objet de
la présente invention de fournir un générateur de courant alternatif qui
emploie des aimants rotatifs pour induire a augmenté le courant alternatif dans
les noyaux de fer de bobines électriques.
C'est encore un autre
objet de la présente invention de fournir un générateur de courant alternatif,
qui peut être fabriqué simplement et facilement et être exploité avec une
grande efficacité.
Ces et autres objets sont obtenus par la présente
invention, un générateur électrique de courant alternatif qui crée trois
différents et distincts des champs magnétiques entre plaie spiralés et magnets
tournants, deux domaines qui sont des champs induits causés par la rotation de
l'aimant. Une pluralité des aimants sont placés tels qu'ils s'étendent vers
l'extérieur d'un axe de rotation. Les
aimants sont espacées circonférentiellement autour de l'arbre, tel que le
terminal Nord polaire d'un aimant fait suite à l'extrémité sud polaire de
l'aimant prochaine ou telle que l'extrémité polaire d'un aimant fait suite à un
aimant avec la même extrémité polaire.
Une pluralité d'éléments tubulaires fixes sont positionnés relativement
espacés les aimants. Les éléments en
spirale chaque ont des enroulements électriques et noyaux métalliques qui
s'étendent les longueurs des éléments bobine.
Les aimants tournent relativement espacées aux extrémités des éléments
de telle sorte que les lignes de flux des aimants coupent les carottes situés
au centre de chacun des éléments bobine bobine.
Ceci induit alternatif courant électrique qui oscille dans les deux sens le
long de la longueur des carottes. Ce
brassage oscillant crée un développement et réduction d'ensemble de lignes de
flux magnétique qui se dilatent et se contractent à travers chaque centimètre
des enroulements de l'élément de bobine.
Ce développement et réduction de champ magnétique induit un champ
magnétique en expansion et s'effondrant et un champ électrique alternatif dans
les éléments en spirale.
Les caractéristiques nouvelles qui sont considérés
comme caractéristiques de l'invention sont énoncées en particulier dans les
revendications annexées. L'invention
elle-même, cependant, aussi bien quant à sa conception, la construction et
l'utilisation, ainsi que des fonctionnalités supplémentaires et avantages, sont
mieux compris après examen de la description détaillée suivante en ce qui
concerne les dessins annexés.
BRÈVE DESCRIPTION DES DESSINS
Fig.1 est une
représentation isométrique des composantes clés de la présente invention.
Fig.2 est une représentation de vue du côté de la présente invention, montrant
que les deux logés ensembles d'éléments tubulaires et leur relation avec les
aimants.

Fig.3 est une vue
explicative, montrant la génération de lignes de flux qui constitue la base
pour le fonctionnement de la présente invention.
Fig.4 est une autre
incarnation de la présente invention.
DESCRIPTION
DÉTAILLÉE DE L'INVENTION
Fig.1 et Fig.2 montrent une représentation claire des composantes du
générateur de courant alternatif 1 de l'invention en cause. Générateur 1 compose de logements 2
et 3. Pour plus de simplicité fins
et facilité de compréhension, logement seulement 2 est montré à la Fig.1. Il faut comprendre, cependant, cette
génératrice 1 de la présente invention est configurée pour être utilisé
avec les deux paliers 2 et 3.
Logement 2 contient les éléments tubulaires 4, 6, 8 et 10. Chaque élément de bobine comprend plusieurs
enroulements, 12, 14, 16 et 18, respectivement, enroulé autour
d'intérieur en acier ou similaire métal carottes 20, 22, 24 et 26,
respectivement. Chaque âme en acier
s'étend à toute la longueur et directement par le biais de chacun des éléments
bobine. Éléments tubulaires 4, 6, 8
et 10 sont montés au sein de logement 2, de telle sorte que les
surfaces de la fin des spiralés et les extrémités des carottes, 20, 22, 24
et 26 sont placés à ras avec la surface extérieure du logement 2.
Enceinte 3
contient aussi quatre éléments en spirale positionnés identiquement comme il
est indiqué en ce qui concerne 2 de logement. Deux de ces éléments en spirale 5 et 7 sont
montrés dans la Fig.2. Élément de
bobine 5 a plusieurs enroulements 13 et centre de base 21 et
élément en spirale 7 a plusieurs enroulements 11 et centre de
base 21.
Aimants, 28, 30, 32 et 34 sont fixées
à arbre 36, qui est configuré pour être tourné par source d'énergie
conventionnelle 37, moteur diesel, turbine, etc.. Aimants, 28, 30,
31, 32 et tous ont se termine par l'extension vers l'extérieur les
polarités. Aimants, 28, 30, 32 et 34 sont
positionnés relativement espacées aux extrémités des noyaux exposés 20, 22,
24 et 26 des éléments tubulaires 4, 6, 8 et 10 et relativement
espacées aux extrémités des quatre conducteurs exposés dans les quatre foyers
spiralés situés dans enceinte 3, carottes 19 et 21 en Fig.2
suit le pôle qui se prolongent vers l'extérieur de l'aimant prochaine. Le terminal Nord polaire d'un aimant peut
suivre le terminal Sud polaire de l'aimant prochain ou le terminal polaire d'un
aimant peut suivre un aimant avec la même extrémité polaire.
Tandis que quatre aimants et quatre cœurs
sont indiquées, il est prévu que carottes et aimants supplémentaires pourraient
être employées dans le générateur. En
outre, tandis que les aimants permanents sont illustrés dans les dessins, les
électro-aimants pourraient également être utilisé, car ils produisent le même
flux magnétique.
Tension électrique
alternative est généré lorsque la source d'alimentation 37 tourne
l'arbre 36, ce qui provoque la rotation des aimants 28, 30, 32 et 34 relativement
espacées, adjacent aux extrémités des carottes 20, 22, 24 et 26 de
spiralés, 4, 6, 8 et 10 et relativement espacées, adjacent aux
extrémités des carottes 19 et 21 de spiralés 7 et 5 et les
extrémités des conducteurs des deux autres éléments bobine de même alignées en
enceinte 3. Le courant qui est
généré est transmis par l'intermédiaire de câbles conducteurs électriques 27,
qui se jette aux points de correspondance 29 dans le logement 2 et 31
en enceinte 3, pour la transmission consolidée à connexion point 33
de l'électricité produite.
Mieux représenté dans
la Fig.2, aimant 28 tournant en ce qui concerne l'espace jusqu'à
la fin de core 20 d'élément en spirale 4, flux 100 l'aimant
coupée le noyau au centre de l'élément de bobine. Ceci induit un courant électrique alternatif
qui oscille dans les deux sens le long de la base 20. Ce brassage oscillant crée un ensemble de
lignes de flux magnétique 200 qui se dilatent et se contractent à
travers chaque centimètre des enroulements d'enroulement 12 en expansion
et s'effondrant. Développement et réduction de champ 200 induit
un champ électrique alternatif dans l'élément de bobine 4 qui
s'accompagne d'un développement et réduction de champ magnétique 300. Il est à noter, significativement, qu'aucune
des lignes de champ magnétique 100, 200 et 300, agir de manière négative
ou dans une action adverse. Cela permet
l'invention de dépasser les limites de la Loi de Lenz, qui stipule que chaque
fois qu'il y a un changement de flux magnétique dans un circuit, une force
électromotrice induite est mise en place qui tend à produire un courant dans un
sens qui s'opposera à la variation de flux.
Fig.3 illustre une autre réalisation de l'invention à
Comme dans la
réalisation antérieure, la rotation des aimants 68, 70, 72 et 74, par
rotation de l'arbre 69 et donc rotor 67, provoque les lignes de
flux des aimants pour couper les carottes, 60, 62, 64 et 66 de spiralés,
44, 46, 48 et 50, finalement ayant pour résultat la production de
courant électrique comme précédemment décrit.
Il est à noter que plus
le diamètre du rotor 67, la bobine plusieurs éléments peuvent être
positionnés autour du rotor. Plus le nombre d'éléments en spirale, le
rotor plus lent 67 doit tourner. Cependant, il y
a une perte de puissance en ce faisant.
En outre, tandis que le rotor 67 est montré comme étant
circulaire, il peut être carré en forme ou formé d'autres configurations de
multi-faces approprié.
Cette façon unique de
production d'électricité permet la génération d'énergie électrique plus, par
exemple n'importe où dans la fourchette de 4 à 137 fois plus de puissance, que
des moyens conventionnelles, préalables.
Il a également l'avantage d'obtenir la puissance de l'unité avec très
peu d'effort.
Comme preuve d'un tel
pouvoir gagne, on se reportera à la décrites ci-dessous sorties expérimentales
de bobines et aimants qui produit l'énergie électrique conventionnel passant
par rapport à l'invention en cause. La
manière conventionnelle de production d'énergie, aux fins de ce qui suit
expérimental sorties, telles que citées dans les présentes, s'effectue en
coupant les fils, pas les noyaux, des enroulements de la bobine avec le flux de
l'aimant.
À cet égard, la preuve
est aussi pourvu que la méthode décrite dans les présentes, de production
d'énergie électrique n'est pas affectée par la Loi de Lenz, par référence aux
lectures obtenues par les méthodes classiques comme la taille de l'augmentation
de la bobine de tr/min. Avec les
méthodes conventionnelles, les valeurs ne changent pas de façon linéaire, mais
sont moins parce que la Loi de Lenz limite les sorties d'augmenter
proportionnellement à la vitesse et la taille de la bobine. En comparaison, toutefois, dans la méthode de
production de puissance de l'invention en cause, il y a une augmentation dans
les lectures de V (tension), j'ai (en cours), et P (puissance) qui est en fait
plus grand que prévu.
On notera aussi que,
tout comme un transformateur, lorsque le nombre de rapport des spires est
augmenté, V augmente et que je diminue, qui est exactement ce que l'on voit à
divers passages tr/min pour les bobines de taille différente. Toutefois, ils ne pas augmenter ou diminuer
proportionnellement.
Ainsi, il présente le
modèle idéal pour la production d'électricité qui correspond au droit général
qui stipule que lorsque la vitesse augmente, la tension augmente
proportionnellement, par l'intermédiaire de l'équation: V = v
(vitesse) de q (charge) × B (champ magnétique). Aussi, cela est vrai pour une bobine, que transformateurs augmentent
proportionnellement au rapport des tours.
Me référant à la tension des sorties pour
chacune des bobines, 1100t, 2200t et 5500t, on voit qu'ils sont compatibles
avec les types de sorties de tension pour une action de transformateur. C'est-à-dire, que le rapport des spires du
monte dans un transformateur fait ainsi la tension. Comme les hausses de tension entre le nombre
de tours n'est pas exactement de 2 à 5 fois, on peut choisir l'une des bobines
et suppose que c'est précis et ajuster en conséquence les autres bobines. Ainsi, par la fixation de la bobine de 1100t, les
autres bobines deviennent 2837t et 5896t respectivement. En fixant la bobine 2200t, les autres bobines
deviennent respectivement de 853t et 4572t.
Et par la fixation de la bobine de 5500t, les autres bobines deviennent
1026t et 2646t respectivement. En outre,
si les ajustements sont effectués tel que décrit ici, c'est-à-dire que les
bobines sont plus grandes que prévu, et ils sont appliqués pour les tensions de
la méthode conventionnelle de production d'énergie, les tensions n'augmentent
pas proportionnellement mais sont en réalité plus petites qu'ils sont censés
pour être, preuve supplémentaire que la Loi de Lenz s'applique aux générateurs
conventionnels, mais pas à cette invention.
Les changements
proportionnelles à la tension par rapport à la vitesse peuvent aussi être
vu. Ainsi, compte tenu de la vitesse de
350 tr/min aussi précis, le 1200 tr/min et 1300 tr/min Vitesse passera à 906
tr/min et 1379 tr/min respectivement.
Compte tenu de la vitesse de 1200 tr/min que précis, le 350 tr/min et
1300 tr/min vitesse devient 464 tr/min et 1826 tr/min respectivement. Et enfin, compte tenu de la vitesse de 1300
tr/min aussi précise, les vitesses 350 tr/min et 1200 tr/min 330 tr/min et 854
tr/min respectivement.
Il faut noter qu'en utilisant
les différentes lectures de tr/min, basés sur ce qui précède, on voit que, dans
la méthode classique de production d'énergie, il y a des pertes associées à des
valeurs mesurées. Les valeurs calculées
montrent à nouveau l'application de la Loi de Lenz dans la voie classique de
production d'énergie, mais pas à cette invention. En effet, s'il y a un ajustement de taille de
vitesse ou bobine tr/min, la production d'électricité de cette invention est en
rien affectée par la Loi de Lenz.
Depuis la Loi de Lenz
n'a aucun effet dans ce générateur, on peut supposer que les tensions
augmentent proportionnellement à la vitesse de la rotation des aimants. Par conséquent, on peut extrapoler les tensions attendues à 1800 tr/min,
la vitesse nécessaire pour créer 60 Hz. En ce qui
concerne ce générateur, pour chacune des trois bobines de la 350 tr/mn, 1200
tr/min vitesse et 1300 tr/min, les résultats suivants (les valeurs se fondent
sur une bobine/aimant.) :
La raison pour laquelle de que le courant pas
évolue linéairement comme les lois de la physique impliquent de
transformateurs, c'est-à-dire que la tension monte basée sur le nombre tourne,
le courant va vers le bas proportionnellement vers le gain en tension, est dû
au fait que la réactance inductive va également vers le haut. Voir le tableau ci-après pour les réactances
inductives pour chaque bobine à chaque vitesse.
Impédance (Z) ou la réactance inductive (X(L)) pour
un circuit avec seulement une bobine dans c'est la tension divisée par le
courant alternatif et l'inductance (L) est Z/2 × pi × F (fréquence). Pour un circuit avec une résistance et une
bobine
Z = racine carrée de (R (résistance) au carré +
X(L) au carré)).
Voici le graphique de l'impédance que z pour toutes
tailles de bobine à tous les vitesses pour la méthode conventionnelle de
générer la puissance et la méthode de production d'énergie avec cette invention
:
Où :
" T " est
l'abréviation de tours,
" CM " correspond à la méthode conventionnelle et
" SI " est synonyme de
l'Invention en cause :
(1)
Pour 350 RPM pour 1100T, 2200T et 5500T bobines :
1. (a) CM: 0.57v
/ 56.6 mA = 10.021 ohms = Z
(b) SI: 1.14v
/ 106.6 mA = 10.694 ohms = Z
2. (a) CM: 0.93v
/ 32.4 mA = 28.704 ohms = Z
(b) SI: 2.94v / 70.1 mA = 41.94 ohms = Z
3. (a) CM: 2.09v
/ 17.3 mA = 120.81 ohms = Z
(b) SI: 6.11v / 37.9 mA = 161.21 ohms = Z
(2)
Pour 1200 RPM pour 1100T, 2200T et 5500T bobines :
1. (a) CM: 1.45v
/ 60.2 mA = 23.387 ohms = Z
(b) SI: 2.95v
/ 141 mA = 20.922 ohms = Z
2. (a) CM: 3.225v
/ 36.2 mA = 89.088 ohms = Z
(b) SI: 7.53v
/ 73.5 mA = 102.449 ohms = Z
3. (a) CM: 4.81v
/ 17 mA = 282.941 ohms = Z
(b) SI: 11.23v
/ 31.4 mA = 357.643 ohms = Z
(3)
Pour 1300 RPM pour 1100T, 2200T et 5500T bobines :
1. (a) CM: 1.6v
/ 83 mA = 19.27 ohms = Z
(b) SI: 4.59v
/ 157 mA = 29.236 ohms = Z
2. (a) CM: 2.75v
/ 50.4 mA = 54.455 ohms = Z
(b) SI: 7.74v
/ 88.5 mA = 87.458 ohms = Z
3. (a) CM: 5.061v
/ 17.3 mA = 292.543 ohms = Z
(b) SI: 12.76v
/ 36.4 mA = 350.549 ohms = Z
(4) Pour 400 tr/min pour
2300T bobine avec 24 calibre fil et 0,5" de base :
(a) CM: 0.15v / 3.7 mA = 40.541 ohms = Z
(b) SI: 2.45v
/ 26.2 mA = 93.511 ohms = Z
(5) Pour 1200 tr/min pour
2300T bobine avec 24 calibre fil et 0,5" de base :
(a) CM: 0.37v / 2.7 mA = 137.037 ohms = Z
(b) SI: 4.1v
/ 10.3 mA = 398.058 ohms = Z
(6) Pour 1400 tr/min pour
2300T bobine avec 24 calibre fil et 0,5" de base ::
(a) CM: 0.58v / 2.4 mA = 241.667 ohms = Z
(b) SI: 8.3v
/ 7.8 mA = 1065.385 ohms = Z
(7) Pour 400 tr/min pour
2300T bobine avec 24 calibre fil et 0,75" de base :
(a) CM: 0.23v / 4.2 mA = 54.762 ohms = Z
(b) SI: 0.37v
/ 7.2 mA = 51.389 ohms = Z
(8) Pour 1200 tr/min pour
2300T bobine avec 24 calibre fil et 0,75" de base :
(a) CM: 0.79v / 3.4 mA = 232.353 ohms = Z
(b) SI: 0.43v
/ 6.9 mA = 207.246 ohms = Z
(9) Pour 1400 tr/min pour
2300T bobine avec 24 calibre fil et 0,75" de base :
(a) CM: 0.79v / 3.21 A = 246.875 ohms = Z
(b) SI: 2.1v
/ 2.7 mA = 777.778 ohms = Z
(10) Pour 400 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,5" de base :
(a) CM: 0.49v / 2 mA = 245 ohms = Z
(b) SI: 5.48v
/ 0.13 mA = 421.538 ohms = Z
(11) Pour 1200 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,5" de base :
(a) CM: 1.25v / 1.5 mA = 833.333 ohms = Z
(b) SI: 15.04v
/ 4.1 mA = 3668.293 ohms = Z
(12) Pour 1400 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,5" de base :
(a) CM: 2.08v / 1.1 mA = 1890.909 ohms = Z
(b) SI: 18.76v
/ 2.5 mA = 7504 ohms = Z
(13) Pour 400 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,75" de base :
(a) CM: 0.64v / 1.7 mA = 376.471 ohms = Z
(b) SI: 7.97v
/ 7.4 mA = 1077.027 ohms = Z
(14) Pour 1200 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,75" de base :
(a) CM: 2.08v / 1.3 mA = 1600 ohms = Z
(b) SI: 20.4v
/ 5.6 mA = 3642.857 ohms = Z
(15) Pour 1400 tr/min pour
bobine de 6000T avec 28 calibre fil et 0,75" de base :
(a) CM: 2.28v / 1.2 mA = 1900 ohms = Z
(b) SI: 28.4v
/ 2.1 mA = 13523.81 ohms = Z
Il est à noter que,
selon les variations de calibre, taille de la base et nombre de tours, l'effets
suivants ont lieu :
b petite taille le fil
le plus élevé des gains indépendamment de la vitesse ;
(b) plus le nombre de
spires, généralement plus les gains ; et
(c) le plus petit coeur taille plus les
gains.
Cependant, lorsque l'on compare les bobines
avec des noyaux plus petits, mais un plus grand nombre de tours, les effets
restent sensiblement les mêmes.
Enfin, les aimants sont placés dans le rotor
afin qu'ils soient tous Nord ou pôle Sud vers le haut ou à l'extérieur. Un générateur de demi-onde pur est créé sans
corriger le signal alternatif, qui, autrement, doit être accompli dans un
générateur CA normal avec des composants électroniques dans un circuit électronique.
Valeurs
expérimentales pour la production d'énergie conventionnelles passant et avec
l'Invention en cause :
Les résultats ont été
obtenus en utilisant un aimant petit 3" avec un diamètre de ± 2" sur
une bobine de 1,25" 1" de diamètre et de 3/8" centre/noyau
d'acier. (Inconnu calibre de fil.)
(a) Méthode
classique de production d'électricité :
1. 0.324 volts
2. 2.782 mA (milli-amps)
3. 0.9014 mW (milli-watts)
(b) Sujet invention
méthode de production d'électricité :
1. 7.12 volts
2. 17.35 mA
3. 100.87 mW
(c) Gains associés
de Volts, Courant et
1. 2,198% au
cours de la sortie de tension conventionnelle.
2. 624% au
cours de la sortie de courant conventionnel.
3. 13,713% plus de puissance conventionnelle.
Les résultats suivants
montrent la tension, courant et les sorties de puissance pour une bobine de
1100, 2200 à 5500 tour de fil de cuivre de calibre 20, 6" de long, 3"
de diamètre avec un noyau de 0,75" d'acier. Les résultats sont celles prises à 350 tr/mn, 1200 tr/min et 1300
tr/min.
(A) 350
tr/min pour une 1100 tourner bobine
Volts mA mW
(a) Méthode classique : 0.57
56.6 32.3
(b) Sujet invention méthode : 1.14 106.6 121.5
(c) Gains associés : 200%
188.3% 376.6%
(B) 350
tr/min pour une 2200 tourner bobine
Volts mA mW
(a) Méthode classique : 0.93
32.4 30.1
(b) Sujet invention méthode : 2.94 70.1
206.1
(c) Gains associés : 316.1% 216.4% 684%
(C) 350
tr/min pour une 5500 tourner bobine
Volts mA mW
(a) Méthode classique : 2.09
17.3 36.2
(b) Sujet invention méthode : 6.11 37.9 231.6
(c) Gains associés : 292.3% 219.1% 640%
(D) 1200
tr/min pour une 1100 tourner bobine
Volts mA mW
(a) Méthode classique : 1.45 60.2 87.3
(b) Sujet invention méthode : 2.95 141 416
(c) Gains associés : 203.4% 234.2% 476%
(E) 1200
tr/min pour une 2200 tourner bobine
Volts mA mW
(a) Méthode classique : 3.225
36.2 116.75
(b) Sujet invention méthode : 7.53 73.5 553.5
(c) Gains associés : 233.5% 203% 474%
(F) 1200
tr/min pour une 5500 tourner bobine
Volts mA mW
(a) Méthode classique : 4.81
17 81.77
(b) Sujet invention méthode : 11.23 31.4 352.6
(c) Gains associés : 235.5% 184.7% 431.3%
(G) 1300
tr/min pour une 1100 tourner bobine
Volts mA mW
(a) Méthode classique : 1.6 83
132.8
(b) Sujet invention méthode : 4.59 157 704.9
(c) Gains associés : 280.6% 189.2% 530.8%
(H) 1300
tr/min pour une 2200 tourner bobine
Volts mA mW
(a) Méthode classique : 2.75 50.5
138.9
(b) Sujet invention méthode : 7.74 88.5 685
(c) Gains associés : 281.5% 175.2% 493.3%
(I) 1300
tr/min pour une 5500 tourner bobine
Volts mA mW
(a) Méthode classique : 5.061 17.3 87.56
(b) Sujet invention méthode : 12.76 36.4 464.5
(c) Gains associés : 252%
210% 530%
Les mesures suivantes sont prises à partir d'une bobine de fil de
calibre 24, 0,5" centre/noyau d'acier et 2300 tours.
(A) 400
tr/min
Volts mA mW
(a) Méthode classique : 0.15 3.7
0.56
(b) Sujet invention méthode : 2.45
26.2 64.2
(c) Gains associés : 1,633%
708% 11,563%
(B) 1200
tr/min
Volts mA mW
(a) Méthode classique : 0.37 2.7
1
(b) Sujet invention méthode : 4.1 10.3 42.2
(c) Gains associés : 1,108%
381% 4,227%
(C) 1400
tr/min
Volts mA mW
(a) Méthode classique : 0.58 2.4
1.39
(b) Sujet invention méthode : 8.31 7.8 64.82
(c) Gains associés : 1,433% 325%
4,657%
Les mesures suivantes sont prises à partir d'une
bobine faite avec un fil de calibre 24, de 0,75 "noyau central de cuivre
et 2300 tours :
(A) 400
tr/min
Volts mA mW
(a) Méthode classique : 0.23 4.2 0.97
(b) Sujet invention méthode : 0.37
7.2 2.66
(c) Gains associés : 137% 171% 235%
(B) 1200
tr/min
Volts mA mW
(a) Méthode classique : 0.79 3.4 2.69
(b) Sujet invention méthode : 1.43
6.9 9.87
(c) Gains associés : 181%
203% 367%
(C) 1400
tr/min
Volts mA mW
(a) Méthode classique : 0.79 3.2 2.53
(b) Sujet invention méthode : 2.1 2.7 5.67
(c) Gains associés : 266%
84% 224%
Les résultats suivants sont dans une bobine en fil de calibre 28,
0,5" centre/noyau d'acier et 6000 tours :
(A) 400
tr/min
Volts mA mW
(a) Méthode classique : 0.49 2 0.98
(b) Sujet invention méthode : 5.48 13 71.24
(c) Gains associés : 1,118%
65% 7,269%
(B) 1200
tr/min
Volts mA mW
(a) Méthode classique : 1.25 1.5
1.88
(b) Sujet invention méthode : 15.04 4.1 61.66
(c) Gains associés : 1,203% 273% 3,289%
(C) 1400
tr/min
Volts mA mW
(a) Méthode classique : 2.08 1.1 2.29
(b) Sujet invention méthode : 18.76 2.5 46.9
(c) Gains associés : 902% 227% 2,050%
Les résultats suivants proviennent d'une bobine de fil de calibre 28,
0,75" acier centre/noyau et 6000 tours :
(A) 400
tr/min
Volts mA mW
(a) Méthode classique : 0.64
1.7 1.09
(b) Sujet invention méthode : 7.97
7.4 58.98
(c) Gains associés : 1,245%
435% 5,421%
(B) 1200
tr/min
Volts mA mW
(a) Méthode classique : 2.08 1.3
2.7
(b) Sujet invention méthode : 20.4
5.6 114.24
(c) Gains associés : 981%
431% 4,225%
(C) 1400
tr/min
Volts mA mW
(a) Méthode classique : 2.28 1.2
2.74
(b) Sujet invention méthode : 28.4
2.1 88.04
(c) Gains associés : 1,246% 175%
2,180%
Les tensions
extrapolées pour les objets immédiatement ci-dessus à la 1800 tr/min vitesse de
la méthode de l'invention en cause sont les suivantes :
(A) 400-1400
tr/min , 0.5 pouce noyau, 2300T:
(1) 11.025v
(2) 6.15v
(3) 10.68v
(B) 400-1400
tr/min , 0.75 pouce noyau, 2300T:
(1) 1.665v
(2) 2.145v
(3) 2.7v
(C) 400-1400
tr/min , 0.5 pouce noyau, 6000T:
(1) 24.66v
(2) 22.56v
(3)24.12
(D) 400-1400
tr/min , 0.75 pouce noyau, 6000T:
(1) 10.25v
(2) 30.6v
(3) 36.51v
Autres lectures
ci-dessus ne semblent pas compatibles avec les autres. Ceci est attribué à la possibilité que les
connexions des câbles peuvent être défectueuses ou la proximité de l'aimant par
rapport à la base ou la bobine a ne peut-être pas été le même. Il n'était pas tenu compte au moment où que
les tests ont été effectués.
Les chiffres suivants
sont dérivés basés sur la prémisse que l'invention présente des
caractéristiques d'un transformateur lorsque le nombre de tours sur les bobines
change. Dans presque toutes ces
situations, l'invention en cause se comporte exactement comme un
transformateur, n'est pas le cas de la méthode classique de production
d'électricité.
CM = méthode conventionnelle ;
SI = l'invention en cause ;
|
350 tr/min |
|
1100 - 2200 |
1100 - 5500 |
2200 - 5500 |
|
CM: |
tension attendue : |
1.14 volts |
2.85 volts |
2.325 volts |
|
|
tension réelle : |
0.93 volts |
2.09 volts |
2.09 volts |
|
|
courant attendue : |
28.3 mA |
11.32 mA |
12.96 mA |
|
|
courant réel: |
32.4 mA |
17.3 mA |
17.3 mA |
|
|
puissance prévue : |
32.3 mW |
32.3 mW |
30.1 mW |
|
|
puissance réelle : |
30.1 mW |
36.2 mW |
36.2 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
1.636 |
3.667 |
2.247 |
|
|
prévu gain en courant: |
0.5 |
0.2 |
0.4 |
|
|
réel gain en courant: |
0.572 |
0.306 |
0.534 |
|
|
gain de puissance attendue: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
0.932 |
1.12 |
1.203 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
2.28 volts |
5.70 volts |
7.35 volts |
|
|
tension réelle : |
2.94 volts |
6.11 volts |
6.11 volts |
|
|
courant attendue : |
53.30 mA |
42.64 mA |
28.04 mA |
|
|
courant réel: |
70.10 mA |
37.90 mA |
37.90 mA |
|
|
puissance prévue : |
121.74 mW |
243.05 mW |
206.09 mW |
|
|
puissance réelle : |
206.10 mW |
231.60 mW |
231.60 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
2.579 |
5.36 |
2.078 |
|
|
prévu gain en courant: |
0.5 |
0.2 |
0.4 |
|
|
réel gain en courant: |
0.658 |
0.356 |
0.5407 |
|
|
gain de puissance attendue: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
1.696 |
1.906 |
1.124 |
|
1200 tr/min |
|
1100 - 2200 |
1100 - 5500 |
2200 - 5500 |
|
CM: |
tension attendue : |
2.90 volts |
7.25 volts |
8.06 volts |
|
|
tension réelle : |
3.225 volts |
4.81 volts |
4.81 volts |
|
|
courant attendue : |
30.10 mA |
12.04 mA |
14.48 mA |
|
|
courant réel: |
36.2 mA |
17.0 mA |
17.0 mA |
|
|
puissance prévue : |
87.29 mW |
87.29 mW |
116.71 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
2.22 |
3.32 |
1.49 |
|
|
prévu gain en courant: |
0.5 |
0.2 |
0.4 |
|
|
réel gain en courant: |
0.6 |
0.28 |
0.47 |
|
|
gain de puissance attendue: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
1.34 |
0.94 |
0.70 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
5.9 volts |
14.75 volts |
18.83 volts |
|
|
tension réelle : |
7.53 volts |
11.23 volts |
11.23 volts |
|
|
courant attendue : |
70.50 mA |
28.20 mA |
29.40 mA |
|
|
courant réel: |
73.50 mA |
31.40 mA |
31.40 mA |
|
|
puissance prévue : |
415.95 mW |
415.95 mW |
553.60 mW |
|
|
puissance réelle : |
553.50 mW |
352.60 mW |
352.60 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
2.55 |
3.81 |
1.49 |
|
|
prévu gain en courant: |
0.5 |
0.2 |
0.4 |
|
|
réel gain en courant: |
0.52 |
0.22 |
0.43 |
|
|
gain de puissance attendue:: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
1.33 |
0.85 |
0.64 |
|
1300 tr/min |
|
1100 - 2200 |
1100 - 5500 |
2200 - 5500 |
|
CM: |
tension attendue : |
3.20 volts |
8.00 volts |
6.88 volts |
|
|
tension réelle : |
2.75 volts |
5.06 volts |
5.06 volts |
|
|
courant attendue : |
41.50 mA |
16.60 mA |
20.20 mA |
|
|
courant réel: |
50.50 mA |
17.3 mA |
17.3 mA |
|
|
puissance prévue : |
132.8 mW |
132.8 mW |
138.98 mW |
|
|
puissance réelle : |
138.9 mW |
87.56 mW |
87.56 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
1.72 |
3.16 |
1.84 |
|
|
expected current gain: |
0.5 |
0.2 |
0.4 |
|
|
actual current gain: |
0.61 |
0.21 |
0.34 |
|
|
gain de puissance attendue: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
1.05 |
0.66 |
0.63 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
9.18 volts |
22.95 volts |
19.35 volts |
|
|
tension réelle : |
7.74 volts |
12.76 volts |
12.76 volts |
|
|
courant attendue : |
78.50 mA |
31.40 mA |
35.40 mA |
|
|
courant réel: |
88.50 mA |
36.40 mA |
36.40 mA |
|
|
puissance prévue : |
720.63 mW |
720.63 mW |
685.0 mW |
|
|
puissance réelle : |
685.0 mW |
464.50 mW |
464.50 mW |
|
|
gain de tension attendue: |
2 |
5 |
2.5 |
|
|
gain de tension réelle : |
1.69 |
2.78 |
1.65 |
|
|
expected current gain: |
0.5 |
0.2 |
0.4 |
|
|
actual current gain: |
0.56 |
0.23 |
0.41 |
|
|
gain de puissance attendue: |
1 |
1 |
1 |
|
|
gain de puissance réel : |
0.95 |
0.64 |
0.68 |
Les données suivantes
représentent les lectures de tension attendues et réelles pour la méthode
conventionnelle de produire la tension et la méthode de l'invention en cause.
Dans pratiquement toutes les circonstances, cette invention a produit plus de
tension que la méthode conventionnelle et a des gains plus élevés que prévu.
|
1100 |
|
350 - 1200 tr/min |
350 - 1300 tr/min |
1200 - 1399 tr/min |
|
CM: |
tension attendue : |
1.954 volts |
2.117 volts |
1.571 volts |
|
|
tension réelle : |
1.45 volts |
1.60 volts |
1.60 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
2.544 |
2.807 |
1.103 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
3.909 volts |
4.234 volts |
3.196 volts |
|
|
tension réelle : |
2.95 volts |
4.59 volts |
4.59 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
2.579 |
4.026 |
1.556 |
|
2200 |
|
350 - 1200 tr/min |
350 - 1300 tr/min |
1200 - 1399 tr/min |
|
CM: |
tension attendue : |
3.189 volts |
3.454 volts |
3.494 volts |
|
|
tension réelle : |
3.225 volts |
5.061 volts |
5.061 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
3.468 |
2.957 |
0.853 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
10.081 volts |
10.919 volts |
8.157 volts |
|
|
tension réelle : |
7.53 volts |
7.74 volts |
7.74 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
2.561 |
2.633 |
1.028 |
|
5500 |
|
350 - 1200 tr/min |
350 - 1300 tr/min |
1200 - 1399 tr/min |
|
CM: |
tension attendue : |
7.167 volts |
7.62 volts |
5.211 volts |
|
|
tension réelle : |
4.81 volts |
5.061 volts |
5.061 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
2.301 |
2.422 |
1.052 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
20.951 volts |
22.693 volts |
12.166 volts |
|
|
tension réelle : |
11.23 volts |
12.76 volts |
12.76 volts |
|
|
gain de tension attendue: |
3.429 |
3.714 |
1.083 |
|
|
gain de tension réelle : |
1.838 |
2.088 |
1.049 |
|
2300 |
(0.5” noyau 24 calibre fil) |
400 - 1200 tr/min |
400 - 1400 tr/min |
1200 - 1400 tr/min |
|
CM: |
tension attendue : |
0.45 volts |
0.525 volts |
0.432 volts |
|
|
tension réelle : |
0.37 volts |
0.58 volts |
0.58 volts |
|
|
gain de tension attendue:: |
3.00 |
3.50 |
1.167 |
|
|
actual voltage gain: |
2.467 |
3.867 |
1.568 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
7.35 volts |
8.57 volts |
4.785 volts |
|
|
tension réelle : |
4.10 volts |
8.31 volts |
8.31 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
1.673 |
3.392 |
2.027 |
|
2300 |
(0.75” noyau 24 calibre fil) |
400 to 1200 tr/min |
400 to 1400 tr/min |
1200 to 1400 tr/min |
|
CM: |
tension attendue : |
0.69 volts |
0.805 volts |
0.922 volts |
|
|
tension réelle : |
0.79 volts |
0.79 volts |
0.79 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
actual voltage gain: |
3.435 |
3.435 |
1.00 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
1.11 volts |
1.295 volts |
1.688 volts |
|
|
tension réelle : |
1.43 volts |
2.10 volts |
2.10 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
3.865 |
5.676 |
1.469 |
|
6000 |
(0.5” noyau 28
calibre fil) |
400 to 1200 tr/min |
400 to 1400 tr/min |
1200 to 1400 tr/min |
|
CM: |
tension attendue : |
1.47 volts |
1.715 volts |
1.459 volts |
|
|
tension réelle : |
1.25 volts |
2.08 volts |
2.08 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
2.551 |
4.245 |
1.664 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
16.44 volts |
19.18 volts |
17.668 volts |
|
|
tension réelle : |
15.04 volts |
18.76 volts |
18.76 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
2,745 |
3.423 |
11.247 |
|
6000 |
(0.75” noyau 28 calibre fil) |
400 to 1200 tr/min |
400 to 1400 tr/min |
1200 to 1400 tr/min |
|
CM: |
tension attendue : |
1.92 volts |
2.24 volts |
2.427 volts |
|
|
tension réelle : |
2.08 volts |
2.28 volts |
2.28 volts |
|
|
expected voltage gain: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
3.25 |
3.563 |
2.427 |
|
|
|
|
|
|
|
SI: |
tension attendue : |
23.91 volts |
27.895 volts |
23.80 volts |
|
|
tension réelle : |
20.40 volts |
28.40 volts |
28.40 volts |
|
|
gain de tension attendue: |
3.00 |
3.50 |
1.167 |
|
|
gain de tension réelle : |
2.56 |
3.563 |
1.392 |
GEOFFREY SPENCE:
SYSTÈME DE CONVERSION D'ÉNERGIE
Brevet US 4 772 816 20 septembre 1988 Inventeur: Geoffrey M. Spence
SYSTÈME DE
CONVERSION D'ÉNERGIE
Il s'agit d'un extrait légèrement reformulé de ce brevet,
qui a une importante sortie électrique capable de fournir que c'est propre
entrée électrique à être autonome alimentant ainsi que générer des kilowatts
d'électricité excédentaire produite. Les
commentaires de m. Harold Aspden très respecté :
" Dans mon énergie Science Report no 8I, j'ai aussi
mentionné l'appareil conçu par Geoffrey Spence, un inventeur basé au
Royaume-Uni. C'est le sujet de son US
Patent no 4 772 816. Électrons injectés
dans une chambre constituée entre deux électrodes concentriques sont déviés
dans l'électrode intérieure par une paire d'aimants qui fournissent un champ
magnétique le long de l'axe central des électrodes concentriques. De lui-même, cela ne devrait ajouter aucun
excès d'énergie, car l'énergie alimentant accélère les électrons est simplement
absorbée par répulsion électrostatique, en charge de l'électrode centrale et
donc le condensateur. Toutefois, si ce
flux d'électrons palpite et liaisons dessiner électronique actuel de cette
électrode centrale puis la pulsation implique une séquence répétitive de charge
et de décharge. Cette fonction de " condensateur
magique " est alors mise à profit.
Les
questions sont ensuite déterminer si l'invention Spence fonctionne vraiment et
si elle est commercialement viable ? Eh bien, j'ai
écrit que rapport Science énergétique en 1996, six ans, et c'est il y a
seulement quelques mois que j'ai entendu plus de ce projet. Geoffrey Spence a mis au point le produit
prototype à l'étape où il a fermé la boucle dans le sens où une partie de la
puissance de sortie a été nourrie pour transmettre l'énergie nécessaire pour
maintenir le faisceau d'électrons. Il a
une unité autonome qui peut fournir des kilowatts de puissance électrique utile
sans entrée d'énergie visible. "
RÉSUMÉ
L'appareil utilise un
champ magnétique (80) pour accélérer une particule chargée radialement
vers une électrode de cible (10).
L'augmentation de l'énergie cinétique des particules permet la particule
donner plus d'énergie électrique à l'électrode de cible (10) qu'a été
donné au départ. Il charge l'électrode
de cible (10), et l'énergie accrue est extrait de l'appareil en
connectant une charge électrique entre l'électrode de la cible et le point de
potentiel inférieure ou supérieure.
Références de brevet US :
1717413 Jun,
1929 Rudenberg 310/306.
3202844 Aug,
1965 Hatch 310/306.
3234411 Feb,
1966 Klein 310/306.
3312840 Apr,
1967 Gabor 310/306.
3393330 Jul,
1968 Vary 310/306.
3899696 Aug,
1975 Shimadu 310/306.
DESCRIPTION
Cette invention concerne un procédé et
appareil pour générer une différence de potentiel entre deux ou plusieurs
électrodes et utilise des particules chargées comme vecteurs d'énergie.
Alimentation électrique
est généralement générée en brûlant un combustible fossile et convertir
l'énergie libérée dans un mouvement rotatif qui actionne les générateurs
électriques. C'est rentable que si
effectué à grande échelle, le processus de conversion étant inefficace ;
utilisant les ressources naturelles et des déchets produits, qui peuvent causer
une pollution environnementale grave. Un
inconvénient supplémentaire, c'est que l'énergie électrique ne peut pas être
fournie directement aux véhicules routiers ou des navires.
Le processus de
conversion énergétique de cette invention n'implique aucun risque de santé ou
de la pollution et génère l'électricité directement par un procédé de
mono-étagés sans déchets. Le facteur de conversion énergétique global
et ratio puissance / poids sont tous deux élevés, rendant l'appareil adapté aux
applications plus fixes et mobiles.
Un appareil connu pour
faire oeuvre utile en agissant sur les électrons avec un champ magnétique est
appelé la " bêtatron ". Il
s'agit d'une chambre à vide en forme de beigne entre les pôles d'un électro-aimant
de forme spéciale. Thermionically
produit des électrons sont injectés dans la chambre avec une énergie
électrostatique initial d'environ 50 keV.
Comme le champ magnétique s'accumule durant son demi-cycle continu
positif, il induit une force électromotrice dans l'anneau, où la force accélère
les électrons et les oblige à se déplacer dans une trajectoire incurvée, par
interaction avec le champ magnétique.
Une distinction importante entre le betatron et le convertisseur
d'énergie de cette invention, c'est que dans le premier champ magnétique a
obtenu d'être en mesure d'augmenter sur une très courte période, afin
d'accélérer les électrons suffisamment, alors que dans le second cas, le champ
magnétique est pratiquement constant et les électrons tombent vers l'intérieur
pour donner leur énergie cinétique et la charge électrique d'une électrode
centrale.
La présente invention
vise à fournir un convertisseur d'énergie qui peut être mobile et de qui a
révélé un aimant permanent ou une source de tension de rayonnement magnétique
associé afin d'amplifier l'énergie électrique au départ pour charger les
particules nourris à, ou produit en, une chambre à soi-disant "vide"
faisant partie de la génératrice, qui augmente l'énergie est extraite de
l'électrode de cible sur lequel les particules sont des incidents.
En conséquence, la
présente invention porte un convertisseur d'énergie selon les revendications
annexées.
Tandis que l'invention
ne doit se limiter à une théorie particulière de fonctionnement, il est basé
sur le fait que, lorsqu'une particule chargée est limitée pour parcourir une
distance radiale de d (quel que soit le chemin d'accès qui il suit en
fait) à travers un champ magnétique d'intensité H, le travail effectué
sur la particule est H x d. Pour
un électron portant une charge e et se déplaçant à une vitesse v sur la
distance d, la force totale sur l'électron est la force centripète de la
somme de H x e x v, moins la force exercée sur les
électrons dans la direction opposée par la force centrifuge, qui est la somme
de (m x v2) / r. En faisant le rayon de l'électrode de centre
sensiblement supérieure à l'orbite de l'équilibre, la force centrifuge peut
être minimisée, maximisant ainsi la force centripète, et donc le travail se
fait en portant la charge à l'électrode
Le processus par lequel
le convertisseur de cette invention fonctionne utilisations, comme une source
de frais, des particules chargées électriquement, pour les électrons d'exemple
et/ou des ions. Deux ou plusieurs électrodes sont logés dans
une chambre à basse pression. Un champ
magnétique comme spécifié ci-dessous traverse la chambre : il émane d'un aimant
permanent, électro-aimant ou une source de rayonnement magnétique. Source d'énergie extérieure sert à donner de
l'énergie initiale de cinétique frais particules, par exemple en chauffage,
accélération par un champ électrique, ou de radiations nucléaires. Le processus de conversion de l'énergie
utilise le champ magnétique pour transférer les particules chargées le long
d'une orbite souhaitée jusqu'à ce qu'ils empiètent sur une électrode centrale
(cathode). Les travaux sur les
particules (par conséquent le potentiel électrique atteint par la cathode) sont
proportionnelle aux force magnétique résultante fois la distance sur laquelle
la force agit. Comme les particules se
déplacent au sein de la chambre qu'ils traversent le champ magnétique. Il produit une force qui agit sur les
particules, la force étant proportionnelle à l'intensité du champ, la vitesse
et la charge électrique des particules et le sinus de l'angle d'incidence entre
la trajectoire de la particule et les lignes de force de magnétique. Cette force a une composante angulaire et un
centripète, qui force les particules pour parcourir une orbite en spirale.
Une force centrifuge
opposée agit également sur les particules en opposition à la force centripète
de magnétique. Le potentiel de
l'électrode est proportionnel au travail devait être fait sur les particules
chargées de surmonter la force centrifuge et le champ électrique autour de la
cathode que les accusations s'accumulent et la différence de potentiel entre
les augmentations d'électrodes.
Potentiel de l'électrode maximal est atteinte lorsque les forces
centrifuges et répulsives sont égales à la force centripète, après quoi aucune
particules chargées plus n'atteindre l'électrode. Le rayon de l'électrode détermine la tension
de la valeur minimale entre la centrale et une électrode externe : comme le
rayon de l'électrode centrale est réduit (par pulvérisation ou érosion), la
force centrifuge augmente, réduisant le nombre de particules chargées qui peut
atteindre l'électrode centrale et par conséquent le potentiel, pour une
intensité de champ donné et la particule de l'électrode de vitesse. La différence de masse entre les ions et des
particules chargées plus légers, comme les électrons, résultats dans
différentes forces centrifuges pour donné des énergies cinétique des
particules. La sortie de la génératrice
et l'efficacité sont optimisées lorsque le générateur utilise le champ
magnétique maximum de minimiser la force centrifuge et de maximiser la distance
radiale sur lequel la force agit pour une intensité donnée. Particules ayant le plus haut ratio de frais
de masse doivent être utilisés.
Gaz à basse pression
peuvent être utilisés comme une source de charge lorsque le gaz ionisé par
collision de particules et d'excitation au sein de la chambre. Gaz dopés peuvent réduire au minimum le
niveau d'énergie d'ionisation des atomes/molécules de gaz ce qui améliore
l'efficacité. Cependant, la force
magnétique résultante est plus faible pour les ions plus lourdes en raison de
leur plus faible vitesse, afin que le champ électrique rayonné par l'électrode
haute tension (cathode) peuvent attirer opposées des particules chargées (+
ions) et par la suite acquitter l'électrode réduisant la tension de
sortie. Diverses méthodes peuvent être utilisées pour surmonter ou réduire cet
effet. Par exemple, une méthode serait de séparer les charges opposées et/ou
d'utiliser des réseaux électriques de partiale pour contrôler le flux de
charges opposées à l'électrode haute tension.
Systèmes gazeux sont généralement plus
complexes que les systèmes de charge simple, fournissant des courants plus
élevés à une tension plus faible, alors que les systèmes de charge simple, par
exemple les électrons utilisés dans les chambres à vide élevés, peuvent générer
des tensions plus élevées.
Le champ magnétique peut être d'un ou
plusieurs aimants permanents et/ou d'un ou plusieurs électro-aimants ; un champ
magnétique statique produit une tension de sortie constante, tandis qu'un champ
variable produit une tension variable de particules avec la masse égale et de
la vitesse.
Une source externe est utilisée pour
accélérer les particules chargées pour leur donner de l'énergie cinétique
initiale, qui s'échappe sous forme de chaleur lorsque les particules entrent en
collision avec l'électrode. Lorsque
l'énergie représentée par l'accroissement de la tension entre les électrodes
est supérieure à l'énergie nécessaire pour fournir les particules chargées ; et
accélérer leur, le processus de conversion est autosuffisant, l'énergie étant
la différence entre la somme de l'énergie cinétique perdue et l'énergie
produite. Charger le flux de l'électrode
centrale via une charge externe vers une autre électrode. L'énergie électrique (travail) libérée est
une fonction du courant (somme des charges qui découlent par seconde) fois la
différence de potentiel. Sortie
électrique et thermique peut être contrôlée en faisant varier : l'intensité du
champ ; la vitesse de la particule ; la densité de particule (libre parcours
moyen), et/ou en y incorporant une grille pour contrôler le taux auquel les
particules atteignent l'électrode centrale.
La sortie est également proportionnelle à la chaleur a perdu ou gagné,
puisque l'énergie de translation de la particule est proportionnelle à sa
température. Chaleur libérée à
l'électrode peut être retourné aux particules à maintenir leur énergie, ou être
utilisées dans un échangeur de chaleur à usage externe. Le générateur utilise normalement un matériau
conducteur non réactif pour empêcher la réaction chimique de gaz, liquides de
refroidissement etc. avec les électrodes, de murs de récipient ou d'autres
composants. Différentes trajectoires de
particules, déplacements et le positionnement des particules en orbite peuvent
être utilisés avec des champs magnétiques appropriées. Le gaz basse pression peut être ionisé par
tout moyen approprié : une méthode serait d'utiliser un canon à électrons/ions où
l'avion et la direction des particules injectées est correcte pour le champ
magnétique appliqué. Dans les appareils
à gaz, les électrons circulant dans le circuit externe, en arrivant à l'anode,
se recombinent avec une ion gazeuse pour former une atome/molécule de gaz
neutre. Cette particule atomique est
dûment re-ionisée par collision et/ou les champs électriques, l'énergie étant
directement ou indirectement dérivé du travail accompli par la force résultante
agissant sur les particules chargées.
Afin que l'invention
peut être mieux comprise, il décrira maintenant en ce qui concerne
l'accompagnement des dessins schématiques, qui sont donnés à titre d'exemple et
dans lequel :
Fig.1 montre schématiquement une coupe transversale du générateur ; et le
chemin suivi par une particule au cours du processus de conversion de l'énergie
;
Fig.2 montre une coupe axiale d'un type d'appareil pour l'invention, à l'aide
d'aimants permanents ; et une grille contrôlant la migration des ions à la
cathode.
Fig.3 montre une
coupe transversale de l'appareil Fig.2 le long de la ligne A - A ;
Fig.4 est une coupe schématique par une forme de convertisseur à l'aide
d'électrons, montrant une série circulaire de sources d'électrons ;
Fig.5 est une coupe axiale grâce à une réalisation plus pratique du convertisseur
Fig.4 ;
Fig.6 est une
section le long de la ligne VI--VI de Fig.5 ;

Fig.7 est une vue en
coupe le long d'un diamètre de un (toroïdale) convertisseur à grande puissance
en forme d'anneau;
Fig.8 est une section sur la ligne A--A de Fig.7, et
Fig.9 est un schéma
d'un convertisseur de deux étages, à l'aide de ces deux formes de particules
chargées simultanément.
Comme illustré à la Fig.1, une
particule chargée est injectée le long d'une trajectoire 2 dans un champ
magnétique s'étendant perpendiculairement au plan du dessin. Le champ imprègne l'espace 4 de la section
annulaire dans une chambre cylindrique 6. Le champ magnétique produit une force sur la
particule, qui s'étend perpendiculairement à la fois c' est la direction du
mouvement et le champ magnétique. Les
causes de force centripète résultante la particule à suivre une fin de parcours
8 spirale sur l'électrode centrale 10 espacée radialement vers
l'intérieur de l'électrode externe cylindrique 12. L'énergie supplémentaire acquise par la
particule est fonction de la distance radiale parcourue et la force du champ
magnétique entre les électrodes. Cette
énergie est rendue à l'impact avec l'électrode centrale, sous forme de chaleur
et/ou de travaux effectués dans ce qui porte l'accusation portée contre les
champs électriques opposés à l'électrode.
En l'absence de l'électrode centrale 10, les électrons suivrait
l'orbite d'équilibre 3, ceci étant l'orbite suivie par une particule
quand les centrifuges et centripètes force équilibre, ayant pour résultat aucun
travaux sur les particules.
Comme le montre plus particulièrement dans Fig.2
et Fig.3, le convertisseur d'énergie 1 comprend pour l'essentiel
d'une chambre annulaire 6 ayant une électrode cylindrique extérieure 12
; une électrode cylindrique intérieure 10 et deux murs étanches au
gaz 14 du matériau d'isolation électrique. Dans l'électrode 12 est un port 22 par
lequel un canon à électrons 20 peut injecter des électrons dans l'espace
4. En outre ou subsidiairement,
un canon à ions 18 permet d'injecter des particules chargées
positivement par le biais de port 16.
Assis sur les grandes
surfaces planes de chambre 6 sont magnétiques polaires 24 donnant
lieu à un champ magnétique uniforme 80 qui traverse l'espace 4 parallèle
à l'axe de la chambre 6. Les
aimants peuvent être des aimants en céramique, ou ils peuvent être des
électro-aimants. Dans les deux cas,
peuvent prévoir de réglage de l'intensité du champ magnétique des moyens (non
illustrés).
Conducteurs lourds 26
raccorder les deux électrodes aux bornes 28 à travers lequel une
charge résistive peut être placée pour dissiper la sortie de la génératrice.
Une pompe à vide (non
illustrée) a son entrée en communication avec l'intérieur de la chambre 6
pour que la pression du gaz dans le générateur peut être réduite à et maintenue
à une valeur désirée de l'atmosphère.
Associé à la pompe, ou séparé de lui, peut être le moyen de s'assurer
que le gaz du générateur est de composition souhaitée, par exemple, celle qui
renforce la possibilité de collisions ionisantes entre les particules chargées
et des atomes de gaz ou des molécules.
Un tel gaz approprié serait néon contenant 0,1 % argon en volume.
Afin de provoquer le
générateur commencer le travail, il est nécessaire de démarrer la pompe à vide
et à dynamiser le canon à électrons ou à chaque source de particules. Ce dernier consiste à chauffer un filament
d'une source externe de puissance jusqu'à atteindre le niveau requis de l'énergie
interne (température) qui provoque à son tour un morceau de matériau
thermo-émissif d'émettre des électrons.
Si les électrons sont les porteurs de charge, ils sont accélérés par un
champ électrique adapté et projetées dans l'espace 4. Ici, ils sont encore accélérées par le champ
électrique radial entre les électrodes, et en même temps avoir une déviation
force exercée sur eux par le champ magnétique axial par laquelle ils passent.
Pour une source d'ions, les électrons sont
accélérés jusqu'à ce qu'elles répercutent certains atomes ou molécules, pour
produire un flux d'ions qui passent de même dans l'espace 4. Avec les polarités indiquées, les électrons
sont attirés par l'électrode centrale, tandis que les ions sont attirées vers
l'électrode externe, qui représente les différentes orientations des sources 18
et 20.
Toutes les molécules de
gaz qui passent à proximité, ou entre, les électrodes sont ionisés par
collision et/ou le champ électrostatique.
Courant de sortie peut alors être prélevé par une impédance de charge
connectée entre bornes 28.
L'impédance est mis en correspondance pour empêcher l'énergie de
processus interne chute au-dessous d'une valeur qui permettrait d'éviter la
re-ionisation des atomes gazeux. Comme
chaque ion est déminéralisée à l'anode, les atomes de gaz aura tendance à
continuer à circuler jusqu'au re-ionisée, la force résultante en reculant les
ions (représentées par des cercles pleins) et électrons (représentés par des
cercles creux) dans leurs orbites respectives.
Il est prévu que, dans
le cas d'un convertisseur utilisant des électrons, la chambre pourrait être
évacuée vers une pression de l'atmosphère choisie et scellée.
Dans cette variante de
l'invention, illustrée à la Fig.4, chaque source d'électrons formant
partie d'une série de circulaire 29 des sources a un corps de 30 electro-émissif
matières telles que le molybdène revêtu de césium, chauffée par un filament
électrique 32 connectée en série ou en parallèle entre une source
d'énergie électrique (non illustré). Immédiatement en face de chaque émetteur 30
est une grille 34 de fils fins, toutes les grilles étant liées à une
source de tension réglable afin de contrôler le flux d'électrons de
l'émetteur. Ces électrons sont projetées
au moyen d'une ou plusieurs électrodes d'accélération 36 à travers
laquelle une différence de potentiel est établie le long de la trajectoire de
l'électron, afin que chaque source d'électrons supplémentaires injecte un flux
d'électrons ayant connu l'énergie cinétique dans un espace 38,
représentée par le cercle indiqué sur une ligne discontinue, traversé par le
champ magnétique de déflexion, au sein duquel est la centrale, cible, électrode
40. Le flux d'électrons injectés
dans le champ magnétique peut se concentrer par électriques et/ou des champs
magnétiques.
Dans les figues restantes,
les parties déjà dénommés conservera les mêmes références.
Dans la configuration
de " disque plat " illustrée à la Fig.5, la chambre annulaire 6
est enfermée dans un corps 42 du matériau d'isolation thermique. L'électrode centrale 10 est assis sur
les isolateurs 44 qui sont percés de conduites 45 pour le passage
d'un fluide de refroidissement et par une sortie conduisent 26, qui peut
s'étendre le long du conduit, alors qu'il est trop froid.
Fig.5 montre comment
l'aimant de déflexion est généralement en forme de U et a deux polaires
annulaires 48, afin que le champ magnétique est uniform entre la surface
de l'électrode 10 et dans la région 38 radialement plus profond
de la source d'électrons circulaire, le champ électrique entre l'électrode 36
et l'émission de surface 61 fournissant les électrons accélérations
initiales (énergie cinétique). Fig.5 montre aussi comment une tension est tapée la charge résistive 40 (qui
fonctionne ainsi comme un potentiomètre) et est alimenté grâce à l'électrode
d'accélération 36.
Chambre 6 est également équipé de
deux aimants annulaires 49 (ou une série de circulaire des aimants
supplémentaires) conçu pour influencer la direction le long de laquelle les
électrons passent dans l'espace 38.
Les aimants fournissent des champs magnétiques locaux pour s'assurer que
les électrons atteignent la limite d'espace 38 tangentiellement,
c'est-à-dire avec une vitesse nulle radiale.
Dans cette variante de l'invention,
illustrée à la Fig.7 et Fig.8, les convertisseurs individuels "
disque plat " de la Fig.5 et Fig.6 sont disposés dans un type de
construction " circulaire ", tels que les champs magnétiques
s'étendent le long de l'axe de l'espace résultant toroïdal 50 pénétrée
par une électrode unique cible toroïdal 51 par laquelle peut passer un
fluide de refroidissement, le long des conduites 52. La section transversale de la Fig.8 montre
que les champs magnétiques sont complétées par un champ électrique produit par
les enroulements 53 enroulé sur un noyau magnétique 54 délimité
par une isolation 55.
Outre le fait que les électrodes sont
communs à tous les convertisseurs, chacun fonctions individuellement comme
décrit ci-dessus. Évidemment la source
d'alimentation au volant les chauffages pour les canons à électrons 56 ;
les électro-aimants (le cas échéant) ; les électrodes de l'accélération et les
grilles de contrôle, doivent être d'une capacité suffisante pour fournir la
plus grande puissance nécessaire à la conduite de cette configuration "
torique ". Certains changements
seraient il faut faire pour le dimensionnement physique et le positionnement de
la construction relativement complexe, mais que tous ceux-ci sont facilement
comprises par un ingénieur compétent, ils ne sont pas encore décrits dans cette
spécification.
Comme nous l'avons déjà mentionné, les
convertisseurs de cette invention sont de deux types, c'est-à-dire
électroniques et ioniques. Fig.9
montre schématiquement comment ils peuvent être combinés pour tirer parti de
leurs différences. Dans l'appareil de
génération de puissance bi-étagé illustré à la Fig.9 la première étape
consiste en un ionisateur 520 fournissant un mélange de particules
chargées, c'est-à-dire les ions et les électrons, d'un séparateur 540,
qui fournit des électrons à une seconde phase consistant en un convertisseur
électronique scellé 560 en parallèle avec un convertisseur ionique
gazeux 580.
Le séparateur de 540
peut utiliser les masses de particules différentes des pour séparer par
centrifugation à l'aide, par exemple, le système de conversion d'énergie de la Fig.1
(sans l'électrode de cible), ou il peut utiliser des champs électromagnétiques
de déviation, ou un processus de diffusion physique, seul ou en
combinaison. Car ce n'est pas partie de
l'objet de cette invention, il ne sera pas décrite dans les présentes tout plus
en détail.
Dans les générateurs de
la Fig.6 et Fig. 8, les particules respectives sont déviés par
magnétisme et accélérés radialement, de fonctionner comme déjà décrit plus
haut.
Parce que chaque
générateur est conçu pour fonctionner plus efficacement, avec sa forme
particulière de porteur de charge, il peut être conçu de manière optimale, ce
qui réduit l'absorption d'énergie causée par les ions et les électrons
recombiner avant chaque est tombé sur son électrode cibles respectifs. Car le convertisseur électronique pourrait
finir avec une électrode de charge négative, alors que l'inverse est vrai pour
le convertisseur ionique, l'énergie de charge 400 extraction de
l'appareil est branché entre les électrodes de deux cibles. Les deux autres électrodes des convertisseurs
peuvent être détenues au même potentiels, comme par étant reliés entre eux, ou
leurs potentiels peuvent flotter.
Le générateur peut être conçu pour produire
une large gamme de tensions de sortie et des courants. Les générateurs de plus basse énergie sont
assez léger pour être mobile, afin qu'ils puissent alimenter des véhicules ou
agissent comme générateurs de stand by.
Différentes configurations d'électrode et l'aimant peuvent être utilisées,
et les générateurs peuvent être connectés en série ou en parallèle. Vestes de refroidissement sont montés pour éviter
la surchauffe en appareil de forte puissance, et le groupe électrogène est
enfermé dans une veste d'un isolant thermique pour réduire les pertes de
chaleur, ce qui augmente les vitesses des particules. Pour les générateurs de haute énergies, il
peut être nécessaire de prévoir la forcée de refroidissement de l'électrode
intérieure, que par les nageoires, la projection à partir de ceux-ci dans un
flux de données à haut débit de liquide de refroidissement approprié.
Bien que le procédé
selon l'invention est particulièrement adapté à l'utilisation d'énergie
électrique extérieure, il faut comprendre que les autres sources peuvent être
utilisées pour fournir l'entrée initiale d'énergie, chaleur p. ex. solaire et
déchets sont quelques-unes des sources variées d'énergie qui pourraient être
utilisés. Contrôle du processus de
génération de charge peut être obtenu par d'autres moyens, y compris un ou
plusieurs électriquement influencé par les grilles, que celui utilisé dans
thermionic valves.
ROBERT ALEXANDER: MÉTHODE POUR LA
MONTÉE EN PUISSANCE ÉLECTRIQUE
Brevet américain 3 913
004 14 octobre 1975 Inventeur: Robert W.
Alexander
MÉTHODE ET
APPAREIL POUR LA MONTÉE EN PUISSANCE ÉLECTRIQUE
Ce brevet présente une
méthode d'altérer un générateur électrique standard destinée à être entraîné
par un moteur séparé, afin qu'il fonctionne sans le moteur. Dans l'exemple cité, une entrée CC de 48
volts à 25 ampères de courant (1,2 kW) produit une 110 volts 60Hz CA sortie de
3,52 kW. C'est un Coefficient de
Performance de 2,93 à un niveau de sortie permet le fonctionnement hors-le-réseau
d'une maison.
RÉSUMÉ
Une forme de machine
rotative disposé de manière à convertir une tension d'entrée sensiblement
constante en une tension de sortie sensiblement constant ; impliquant
généralement, un rotor qui tourne à une vitesse sensiblement constante dans un
stator, et qui consiste en un noyau de transformateur soumis à et avoir un
enroulement moteur-transformateur primaire et un enroulement secondaire
transformateur-générateur ; auquel cas transformé et généré puissance sont
synchroniquement combinée comme une puissance accrue.
FOND
Alimentation électrique
est fréquemment passe en tension, phase, fréquence, et le courant passe
d'alternant directs ou de direct à l'alternance. Conversion de tension dans les circuits CA
est habituellement au moyen de transformateurs et dans les circuits en courant
continu est généralement au moyen du moteur-générateur. Conversion de phase s'effectue également par
les transformateurs ou moteur-générateur, et conversion de fréquence s'effectue
plus simplement par le moteur-générateur.
Moteur-générateur ont différentes
classifications d'emploi, comme suit :
(1) CC à CC, utilisé
pour charger les batteries et à la poussée de tension.
(2) CA pour CA, utilisé
pour la conversion de phase et de fréquence
(3) CA à CC utilisé pour tous les types de service, telles que la recharge
de la batterie, excitation de champ de générateur et de moteur, trains,
électrolyse et régulation de vitesse etc. et
(4) CC à CA utilisé
dans une mesure limitée pour des applications spéciales.
Combinaison
moteur-générateur ont été construits pour répondre à ces besoins, comme les
dynamotors intensifier la tension continue pour les équipements radio et
amplidynes pour reproduire un signal faible à un niveau de puissance
supérieur. Lorsqu'une fréquence variable
particulière CA est tenue d'un ensemble moteur-alternateur et le bloc
d'alimentation CC, l'équipement comprend un moteur CC à vitesse variable et un
alternateur séparé par elle. Ce matériel
est spécial dans la nature et se caractérise par la séparation du moteur et du
générateur et par les enroulements de polyphasé (généralement triphasé)
générateur et avec transformateurs automatiques ayant des robinets adaptés pour
obtenir les tensions requises ; et un régulateur de vitesse CC pour le
moteur. La sortie de phase d'un tel équipement
est sélective et sa capacité de monophasé nécessairement limité (66 %) par
rapport à sa capacité de tri-phasé, où l'efficacité de transmission affaire
pour monophasé est pauvre.
Lorsqu'une niveau
puissance élevée est requise, l'amplidyne travaille avec enroulements et
brosses équipées à cet effet et dans certains cas d'effectuer une sortie de
courant constante d'une tension constante d'entrée, par exemple, dans le
convertisseur rotatif inversé fourni pour convertir continu-alternatif. Toutefois, la présente invention est
préoccupe avec méthode et appareil pour augmenter la puissance électrique et
fournit un convertisseur dynamo-électrique qui opère à partir d'un
approvisionnement en énergie électrique pour produire le courant alternatif
plus efficacement pour une charge utile.
La méthode consiste à
étapes simultanées de moteur-transformateur-générateur et le mode de
réalisation préféré de l'appareil comporte un convertisseur dynamo-électrique
sous la forme d'une machine rotative combinée en un seul rotor tournant dans un
stator, le rotor étant composé d'un noyau de transformateur ayant un
enroulement moteur-transformateur primaire et un enroulement secondaire
transformateur-générateur et le stator étant composée de poteaux de champ
magnétique.
Convertisseurs synchrones ont été combinés
dans les machines à rotor simple pour produire des ms du courant alternatif,
mais que l'effet est très différent de l'effet de la présente invention lorsque
CA est à produire du courant continu dans un rotor unique ayant les
enroulements primaire et secondaire induit par opposition à enroulements induit
communs aux circuits en courant alternatif et de CC. Avec la présente invention, tant une
transformation et un effet de génération sont produites dans le rotor, ce qui est
intrinsèquement synchronisé et envoyées à travers les fils de sortie de courant
alternatif. A.C. moteurs et les générateurs de CC ont été combinées en une
seule machine, ce qui est dans un rotor et des convertisseurs dénommés aussi
synchrone. Cependant, les convertisseurs
synchrones font défaut dans leur capacité à se transformer CC en courant
alternatif lors de l'utilisation de l'ancienne comme un moteur pour conduire un
générateur en même temps et plus particulièrement, pour conduire un alternateur
synchrone.
RÉSUMÉ DE L'INVENTION
Cette méthode implique le placement d'un
enroulement primaire dans un champ pour les deux moteur même et d'avoir un
effet transformateur en ce qui concerne un enroulement secondaire également
dans un champ d'avoir un effet de générateur.
Avec son mode de réalisation préféré, ce convertisseur dynamo-électrique
est constitué des enroulements primaires et secondaires, combinés à un rotor
commutated pour alterner une alimentation d'énergie CC dans et ainsi motiver le
rotor dans un champ du stator. L'enroulement
primaire est avantageusement de moins de tours que le secondaire et au moyen de
la force électromotrice lecteurs les enroulements secondaires des tours de plus
à couper les lignes de force de magnétique pour la génération d'énergie
électrique à un niveau de tension plus élevé que l'offre de CC. Ce moteur à courant continu exploité est
shunt enroulé avec les pôles de stator champ entièrement alimenté par
l'alimentation en énergie CC, ou est fourni avec des poteaux de champ des
aimants permanents, à motiver efficacement le rotor et générer efficacement
l'énergie électrique dans les enroulements secondaires. La sortie de courant alternatif de
l'enroulement secondaire est intrinsèquement synchronisée avec la fonction de
transformateur des enroulements primaires combinées dans les fentes communes du
rotor unique ; et en ajoutant le transformateur et générateur de tensions et
ampérages la puissance en watts est augmenté à la sortie.
DESSINS
Les différents objets
et caractéristiques de cette invention seront entièrement compris dans la
description détaillée suivante de la typique forme préférée et l'application
qui est faite dans les dessins qui l'accompagne, dans lequel :
Fig.1 est une vue schématique schématique des composants convertisseur
dynamo-électrique comprenant la présente invention.
Fig.2 est un diagramme d'un commutateur de type pinceau, brosse de bagues
collectrices et champ pôle arrangement qui est utilisé.
Fig.3 est une coupe longitudinale dans une machine qui incarnent le stator et
le rotor sur roulements avec l'armature et les brosses supprimés.
Fig.4 est un doublon
typique d'un diagramme montrant la puissance de sortie du convertisseur
dynamo-électrique d'oscilloscope.
RÉALISATION PRÉFÉRÉE
Le convertisseur
dynamo-électrique est illustré schématiquement dans les dessins et implique, en
général, un rotor R transportés sur roulements espacés B afin de
tourner sur un axe A concentrique dans un stator S. Le rotor R comprend l'armature, tandis
que le stator S comprend le domaine, il étant un commutateur C
associé à enroulements primaires 10 sur le rotor et les bagues
collectrices SR associés à enroulements secondaires 11 sur le
rotor. Pinceaux, 12 et 13 est
engagés une lorsque le collecteur et les bagues collectrices respectivement,
par des moyens conventionnels, à mener CC à travers le collecteur C et à
mener des CA à travers les bagues collectrices SR. Les pinceaux 12 et enroulements
primaires interconnectés 10 forment un moteur tandis que les brosses 13
et les enroulements secondaires interconnectés 11 constituent un
générateur ou alternateur.
Dans la pratique, les
enroulements de champ 16 peut être excités séparément ou connectées en
parallèle avec les brosses 12 ou détourné en ce qui concerne le moteur
principal 10 de bobinage.
Motorisation du rotor induit R, ou automobile, provoque des
inversions de polarité continu sur une base de cycle tel que déterminé par la
vitesse de rotation, et cela se traduit naturellement par des inversions
magnétiques dans le noyau du rotor 15 et une induction conséquente dans
les enroulements secondaires 11.
Une caractéristique de cette invention consiste à réunir et relation
coopérative des enroulements primaires et secondaires qui occupent des fentes
communs et embrasser une partie commune de la carotte 15 du rotor R,
donc pour avoir une fonction de transformateur mais aussi une fonction
génératrice comme les lignes de force magnétique sont recoupées par les
enroulements secondaires. Le stator S
a champ pôles de polarité magnétique opposée, excité indépendamment de
l'induit, ou titre d'aimants permanents et ballottés de préférence à travers
l'entrée CC. Comme indiqué, il y a
quatre poteaux de champ équidistants dans une série disposée sur sa circonférence.
Dans la pratique, les
enroulements du moteur CC primaires sont de moins de tours dans les fentes de
rotor que les enroulements secondaires du générateur CA. Par exemple, les enroulements du moteur
primaires 10 sont une plaie plate entre le nord au sud, pôles du champ
tandis que les enroulements secondaires générateur sont plats enroulés dans les
fentes mêmes ou communs de l'induit du rotor.
Dans une unité typique ayant un commutateur quatre brosse avec 20 bar et
avoir une armature de 20 emplacements, les enroulements primaires 10 sont
composés d'un nombre de tours du conducteur efficacement dessiner 48 volts CC à
25 ampères ou de 1 200 watts à tourner à 1 750 tr/min, tandis que les
enroulements secondaires 11 sont composent d'un nombre de tours du
conducteur efficacement pour fournir 60 cycle (en les transformant et en
générant) 110 volts CA à 32 ampères ou 3 520 watts, le voltmètre utilisé pour
lire ces valeurs sur une réduction effective de la pratique étant étalonné pour
lire la valeur quadratique moyenne (RMS) de l'onde sinusoïdale pure, qui est de
70,7 % de la tension de crête.
La réduction de la
pratique précédemment dénommé une " unité typique " a été construite
d'une machine à l'origine conçue comme générateur autoexcitant de 60 cps 110 volts
2,5 kVA pour être arbre entraîné par un moteur séparé. Tout d'abord, l'auteur principal a été
éliminé. Les bobinages excitateur
étaient destinés à exciter le champ à 45 volts CC envoyées à travers le
collecteur, tandis que les enroulements générateur devaient livrer
indépendamment des 110-120 volts CA à travers les bagues collectrices. Le ratio
sinueux entre les enroulements excitateur et générateur était environ d'un à
trois, et ce sont les valeurs qui ont déterminé les valeurs employées dans la réduction
actuelle de la pratique. Cependant, on s'entend que les autres valeurs peuvent
être employées par leur conception, pour un fonctionnement à l'entrée voulue et
les tensions de sortie et les ampérages.
Il doit aussi être entendu que la réduction de l'exemple pratique
divulgués ici n'est pas nécessairement la conception optimale, dans cette autre
puissance d'entrée-sortie soldes sont envisagées, comme une batterie tension
continue sensiblement égale à la tension d'alimentation. Dans tous les cas, une augmentation inattendue de puissance est réalisée
en pratiquant cette invention.
Ce convertisseur
électrique dynamo fonctionne intrinsèquement à une vitesse angulaire
sensiblement constante avec le résultat que les cycles alternés de la sortie
sont sensiblement constante. En outre,
la tension d'entrée CC peut être maintenue à un niveau sensiblement constant de
sorte que la tension de sortie est également sensiblement constante. Comme indiqué, la sortie est monophasé CA
auquel cas la puissance en watts livré est le produit du courant, le facteur de
tension et la puissance. La tension est
sensiblement constante, le courant varie avec la charge appliquée à la sortie,
car il est affecté par le facteur de puissance.
On voit donc que la puissance apparente représentée par voltage ampérage
de fois provient directement du contrôleur de domaine d'entrée et appliquée au
moteur principal 10 de bobinage pour motiver le rotor R pour les
fonctions précédemment décrites. Il
verra également donc, que l'entrée de C.C est commutated dans C.A. et
transformée par induction des enroulements 10 en enroulements 11.
Il verra également
donc, que le ca généré par la motorisation du moteur est synchrone imposé les
enroulements 11 et tout à la fin que les deux courants alternatifs sont
complémentaires et ajouter un à l'autre.
On remarquera que la puissance de sortie est environ tripler la
puissance d'entrée, en raison de la superposition synchrone de tension d'entrée
transformée et généré la tension tout en utilisant l'ancien pour faire
fonctionner le rotor afin de générer ce dernier. Une caractéristique de cette invention est la
séparation des circuits primaires et secondaires et l'isolement qui en découle
du CC entrée inversée de la prise CA et l'utilisation de l'énergie d'entrée
correspondant à la charge de sortie selon ampérage requis pour les opérations
dont ces diminutions machine est appliqué.
Dans l'accomplissement
de cette invention, la machine électrique de la dynamo est classique dans la
conception et les enroulements primaires et secondaires, 10-11 sont
enroulés dans les fentes communs de l'armature qu'ils sont en soi générateurs
passionnants. Toutefois, les enroulements primaires 10 sont
bobinages du moteur-transformateur et fonction totalement comme tel. De même, les enroulements secondaires 11 sont
enroulés dans les fentes de l'armature ainsi que de l'enroulement primaire 10
et sont alimentés en courant qui alterne grâce à la commutation et la
rotation de l'induit, par conséquent, il y a une action de transformateur entre
les enroulements primaires 10 et les enroulements secondaires 11 et
cette fonction de transformateur est complétée par la génération d'un courant
superposée en vertu de l'enroulement secondaire 11 coupe les lignes de
force de magnétique fournies par l'entourage champ du stator. Par conséquent, il y a une multiplication de
puissance appliquée de façon synchrone par les SR de bagues collectrices
pour les brosses de sortie 13, et cette puissance de sortie accrue est
mesurable comme précédemment décrit et double ou presque trois fois celle de la
puissance d'entrée.
MÉTHODE
Se référant maintenant cette méthode de plus
en plus courant, d'entrée de courant alternatif est appliqué à un enroulement
primaire pour les motos et magnétiser alternativement un noyau. L'enroulement primaire ladite est immergé
dans un champ et par conséquent est due au moteur et en même temps pour
effectuer la première étape de la transformation. Une deuxième étape de la transformation est
ensuite effectuée par un anticorps secondaire sinueuses associées au cœur de
fonctionner comme un transformateur et un générateur de bobinage, et le courant
de sortie est tiré à une valeur de puissance accrue par rapport à la puissance
d'entrée, car le courant induit par l'action de transformateur est superposé
sur le courant généré en coupant les lignes de force magnétique, par automobile
du secondaire serpentant à travers le champ magnétique. L'application directe du courant alternatif à
l'enroulement primaire est envisagée, mais l'incarnation présente et préférée
emploie commutation de courant continu qui est inversé ainsi à une prise
électrique en train de l'automobile de l'enroulement et le noyau dans lequel
ils sont transportées avec l'enroulement secondaire. Le résultat net est trois fois, qu'il n'y a
une fonction d'automobile, une fonction de transformation et une fonction
génératrice, qui sont intrinsèquement synchronisées pour augmenter la puissance
de sortie par rapport à la puissance d'entrée.
De ce qui précède, on
verra que cette méthode et le convertisseur dynamo-électrique appelé un DEC,
superpose synchroniquement transformée en électricité et mécaniquement généré
énergie électrique lors de l'inversion CC à CA comme indiqué en observant le
diagramme de l'oscilloscope dupliqué dans la Fig.4 des dessins. La section moteur CC de l'unité de
rotor-stator fonctionne à sa vitesse conçu bien à l'intérieur une petite
tolérance, en appliquant connu principes, techniques et par conséquent, la
section de générateur-alternateur CA sera exploitée à la fréquence sensiblement
uniforme, par exemple, 60 cycles par seconde.
Ainsi, le potentiel de tension de sortie est réduit au maximum, tandis
que le courant est tiré selon les besoins, au sein de la capacité nominale de
l'appareil.
SHIGEAKI HAYASAKA: GÉNÉRATEUR INDUCTION
Brevet US 5 892 311 6 avril1996 Inventeur: Shigeaki Hayasaka
GÉNÉRATEUR
INDUCTION AYANT UNE PAIRE DE PÔLES MAGNÉTIQUES DE LA MÊME POLARITÉ
OPPOSÉS LES UNS
AUX AUTRES PAR RAPPORT À UN AXE DE ROTATION
Ce brevet couvre un
appareil qui est censé avoir une puissance plue que la puissance d'entrée
nécessaire pour l'exécuter.
RÉSUMÉ
Un générateur induction
ayant une paire de pôles magnétiques de la même polarité opposés les uns aux
autres par rapport à un axe de rotation se caractérise par une efficacité de
conversion de haute énergie. La
génération de l'induction a un axe de rotation entraîné par des moyens externes
; un nombre pair de (plus trois) noyaux statoriques fourni à encercler l'arbre
de rotation, lacunes prédéterminés fournis entre les cœurs de stator adjacent ;
un premier rotor monopole fourni dans l'axe de rotation, entouré par le nombre
de pair de noyaux statoriques et eu des premières et deuxième magnétique pôles
de la même polarité, les pôles magnétiques de la premières et la deuxième
s'opposés les uns aux autres par rapport à l'axe de rotation dans une coupe
transversale ; un deuxième rotor monopole fourni dans l'arbre de rotation afin
d'affronter le premier rotor de monopole à une distance prédéterminée, le long
de l'axe de rotation, entouré par le nombre de pair de noyaux statoriques et eu
des troisième et quatrième des pôles magnétiques de la même polarité inverse la
polarité des pôles magnétiques premiers et deuxième, troisième et quatrième
pôles magnétiques étant en face de l'autre par rapport à l'axe de rotation ;
une pluralité des enroulements fournie dans le nombre pair de noyaux
statoriques et connecté selon une configuration prédéterminée.
Références de brevet US :
282472 Jan.,
1883 Delaporte 318 / 197.
2982872 May.,
1961 Fredrickson 310 / 163.
3858308 Jan.,
1975 Peterson 29 / 598.
4780635 Oct.,
1988 Neumann 310 / 216.
5030867 Jul.,
1991 Yamada et al. 310 / 156.
5111095 May.,
1992 Hendershot 310 / 168.
5402025 Mar.,
1995 Saito et al. 310 / 156.
Autres
Références :
Publication "
Réticence de nouveaux Concepts de machines à vitesse Variable Drives ",
Lipo, T.A., actes du colloque méditerranéen électrochimique,Ljubljana, May
22-24, 1991, pp. 34-43.
DESCRIPTION
DOMAINE
TECHNIQUE
La présente invention
concerne un générateur asynchrone ayant une paire de pôles magnétiques de la
même polarité opposés les uns aux autres par rapport à un axe de rotation.
Générateurs asynchrones ont été appelés à un
seul type d'appareil électrique de jours relativement anciens et incorporés
sous diverses formes adaptées pour des applications individuelles. En plus des applications dans les centrales
électriques, des navires et des aéronefs, des générateurs asynchrones pratiques
à des fins domestiques ou de loisirs ont été mis au point et largement
utilisés.
Un générateur
asynchrone convertit l'énergie cinétique en énergie électrique. En raison d'une nécessité d'améliorer
l'efficacité d'utilisation de l'énergie, il existe une demande pour une
conversion haute efficacité énergétique.
ARRIÈRE-PLAN
ART
Comme chacun le sait,
un générateur asynchrone fonctionne sur le principe qu'une force électromotrice
induite dans un enroulement, proportionnellement à la vitesse à laquelle le
flux magnétique traverse cette bobine (Loi de Faraday de l'induction
électromagnétique). Conformément à la
Loi de Lenz, une force électromotrice induite est générée dans une direction
dans laquelle un courant qui agit contre un changement dans le flux magnétique
est généré.

Par exemple, comme sur
la Fig.1A et Fig.1B, en supposant que le phi de flux magnétique
traversant une bobine circulaire 1 dans une direction perpendiculaire se
déplace A et B direction tel qu'indiqué par la flèche, un courant I1
flux conformément à la Loi de Faraday de l'induction électromagnétique, afin
que l'aiguille du galvanomètre 2 balançoires dans le sens horaire (+
direction) puis retourne à la position zéro.
Lorsque le flux magnétique phi se déplace dans la direction de B
à C, un courant I2 s'écoule pour que l'indicateur du galvanomètre
2 balançoires dans le sens antihoraire (-direction) puis retourne à la
position zéro.
Généralement, un
générateur asynchrone est construit de telle sorte qu'une force électromotrice
induite selon la règle droite de Flemming par un chef d'orchestre, coupant les
lignes de flux magnétique (Fig.1A) ou par les lignes de flux magnétique
traversant le conducteur (Fig.1B).
Un rotor dans un
générateur asynchrone est généralement construit comme un corps monobloc, avoir
disposé en alternance les pôles Nord et pôles Sud. Lorsqu'il y a deux pôles
magnétiques, les pôles N et S-pôle sont en face de l'autre. Quand il n'y a plus de deux pôles magnétiques
(par exemple, quatre pôles magnétiques ou six pôles magnétiques etc.), les
pôles N et S-pôle alternent, résultant dans un N-S-N-S... succession.
Dans ce contexte, un
générateur d'induction unipolaire est un cas particulier dans lequel une force
électromotrice est générée par un chef d'orchestre, coupant le flux magnétique
déplaçant ou en rotation, et un courant continu est fourni par une bague
collectrice. En d'autres termes, un
moteur à induction unipolaire est unique dans sa construction caractérisée par
un champ magnétique non-alternant circulant dans le même sens.
Dans le générateur
d'induction classiques tel que celui décrit ci-dessus, amélioration de
l'efficacité de conversion énergétique est atteint tel que le rotor est
constitué d'une ferrite, ou les terres rares, les aimant, caractérisé par un
produit de haute énergie et une perméabilité petite marche arrière
(perméabilité de recul). Par ailleurs,
l'étendue de démagnétisation en raison de la création d'un champ magnétique de
compteur dans une bobine d'induction est réduite permettant la polarité unique
du rotor pour interagir avec le stator en formant un circuit magnétique. Cependant, malgré ces mesures, la réduction
de l'efficacité de conversion d'énergie en raison d'un champ magnétique de
compteur du noyau du rotor, plus précisément, en raison d'une démagnétisation
résultant du champ magnétique de compteur causé par la réaction de l'armature
présente un grave problème.
La présente invention a
été élaborée compte tenu des points ci-dessus, et son objet est de fournir un
générateur asynchrone ayant une paire de pôles magnétiques de la même polarité
opposés les uns aux autres par rapport à un axe de rotation, dans laquelle une
efficacité de conversion d'énergie élevé est atteint.
DIVULGATION DE
L'INVENTION
La présente invention
fournit un générateur asynchrone ayant une paire de pôles magnétiques de la
même polarité opposés les uns aux autres par rapport à un axe de rotation,
caractérisé par comprenant :
Un arbre de rotation
entraîné par des moyens externes ;
Un nombre pair de (plus
trois) noyaux statoriques fourni à encercler l'arbre de rotation, lacunes
prédéterminés fournis entre les cœurs de stator adjacent ;
Un rotor de polarité
opposée à la seule première fourni dans l'axe de rotation, entouré par le
nombre de pair de noyaux statoriques et avoir des aimants de premières et
deuxième magnétisés telle que le nombre pair de noyaux statoriques restent
confrontés à une première polarité, les premiers et deuxième aimants s'opposés
les uns aux autres par rapport à l'axe de rotation dans une coupe transversale
;
Un deuxième rotor
unique-opposé-polarité fourni dans l'arbre de rotation afin d'affronter le
premier rotor single-opposé-polarité à une distance prédéterminée, le long de
l'arbre de rotation, entouré par le nombre de pair de noyaux statoriques et eu
des troisième et quatrième aimants magnétisés telle que le nombre pair de
noyaux statoriques restent confrontés à une polarité deuxième qui est en face
de la polarité de la première polarité, les aimants de troisième et quatrième
étant disposés en face de l'autre par rapport à l'axe de rotation ;
Une pluralité des
enroulements fournie dans le nombre pair de noyaux statoriques et connecté
selon une configuration prédéterminée, caractérisée en ce que :
Un champ magnétique
tournant qui provoque l'induction électromagnétique dans le nombre pair de
noyaux statoriques successivement est créé par le premier, en second lieu,
troisième et quatrième aimants lorsque les rotors de premières et deuxième
single-opposé-polarité sont tournées ; et
Augmentation périodique
et la diminution du nombre de flux magnétique lignes traversant un enroulement
donné et associés diminution périodique et augmentation traversant une causes
sinueuse adjacentes une force électromotrice périodique ayant une forme d'onde
rectangulaire à la sortie.
Dans un aspect de la
présente invention, la pluralité des enroulements connectés selon les circuits
de première et deuxième série de forme configuration prédéterminée :
Le premier circuit
série génère une force électromotrice premier périodique, ayant une forme
d'onde rectangulaire lorsqu'un champ magnétique tournant qui provoque
l'induction électromagnétique dans le nombre pair de noyaux statoriques
successivement est créé par le premier, en second lieu, troisième et quatrième
aimants lorsque les rotors de premières et deuxième single-opposé-polarité sont
tournées ; et
Le deuxième circuit
série sorties une périodique deuxième force électromotrice d'une forme d'onde
rectangulaire 1800. opposition de phase avec la première force électromotrice
et ayant la même période que la première force électromotrice, lorsqu'un champ
magnétique tournant qui provoque l'induction électromagnétique dans le nombre
pair de noyaux statoriques successivement est créé par la première et deuxième
single-opposé-polarité rotors sont tournées.
Le générateur de
l'induction de la présente invention peut également comprendre :
Position de rotation détectant les moyens
pour détecter une position de premiers et deuxième single-opposé-polarité
rotors au cours de leur rotation ; et
Moyens qui provoque les
éléments positifs de la première force électromotrice ayant une forme d'onde
rectangulaire et fournies par le premier circuit série, ou les éléments
positifs de la deuxième force électromotrice ayant une forme d'onde rectangulaire
et fournis par le deuxième circuit série à la sortie à intervalles d'un angle
électrique de 1800 alternativement de commutation.
Dans un autre aspect de
la présente invention, la pluralité des enroulements comprennent un premier
enroulement dans un premier noyau de stator du même nombre de noyaux
statoriques, un deuxième enroulement fourni dans un second noyau de stator
adjacent au premier noyau stator afin d'enrouler dans une direction opposée à
une direction dans laquelle le premier enroulement est fournis, un troisième
enroulement fourni dans un troisième noyau de stator adjacent à la second noyau
de stator afin de vent dans la même direction que le premier bobinage, un
quatrième dans une quatrième noyau de stator adjacent au troisième noyau afin de
vent dans la direction opposée une direction dans laquelle le troisième
enroulement stator est fournis, le premier par le biais des enroulements
quatrième étant reliés entre eux selon une configuration prédéterminée de
bobinage.
Dans encore un autre aspect de la présente invention, le
premier circuit série comporte un enroulement première condition pour enrouler
une première direction dans un premier noyau de stator du même nombre de noyaux
statoriques, un deuxième enroulement en série reliée à l'enroulement première
et fourni dans un second noyau de stator adjacent au premier noyau stator afin
d'enrouler dans un deuxième sens opposé au sens premier, un troisième
enroulement en série reliée avec le deuxième enroulement et condition dans un
troisième noyau de stator adjacent à la second noyau de stator afin d'enrouler
la première direction, un quatrième bobinage en série reliée à la troisième
enroulement et fourni dans un stator quatrième base adjacente à la troisième
noyau de stator afin d'enrouler la deuxième direction ; et
Le circuit de la deuxième série comprend une cinquième
condition de bobinage pour enrouler la deuxième direction dans le premier noyau
de stator, un sixième d'enroulement en série connectés à l'enroulement
cinquième et fourni dans le second noyau de stator afin d'enrouler la première
direction, un septième de bobinage en série reliée avec l'enroulement sixième
et fournis dans le troisième noyau de stator afin d'enrouler la deuxième
direction, un huitième de bobinage en série reliée à l'enroulement septième et
fourni dans le quatrième noyau de stator afin d'enrouler la première direction.
Dans un autre aspect de la présente invention, le premier
par le biais de quatrième aimants sont en forme d'arc ; et
le nombre de pair de noyaux statoriques ont coupes en
forme d'arc.
Dans encore un autre aspect de la présente invention,
l'arc en forme tout d'abord par le biais de quatrième aimants et les noyaux
statoriques qui ont des sections transversales de type arc ont une longueur
circonférentielle presque identique.
BRÈVE
DESCRIPTION DES DESSINS
Fig.1A et Fig.1B sont des diagrammes expliquant le principe d'un
générateur d'induction ;
Fig.2A et Fig.2B sont des graphiques montrant un premier mode de
réalisation de la présente invention ;
Fig.3A et Fig.3B sont des graphiques montrant un rotor
unique-opposé-polarité 11N selon le premier mode de réalisation de la
présente invention ;
Fig.4A et Fig.4B ont des graphiques montrant un rotor
unique-opposé-polarité 11S selon le premier mode de réalisation de la
présente invention ;
Fig.5A, Fig.5B et Fig.5C sont des graphiques montrant comment
les câblages sont reliés entre eux selon le premier mode de réalisation de la
présente invention ;
Fig.6A est un diagramme schématique montrant comment un champ magnétique
tournant selon le mode de réalisation première traverse enroulements 7c - 10c ;
Fig.6B montre un
chemin magnétique ;
Fig.7 est un schéma
montrant un oscillogramme d'une tension de sortie selon le premier mode de
réalisation ;
Fig.8A et Fig.8B
sont des graphiques montrant un deuxième mode de réalisation de la présente
invention ;
Fig.9 est un schéma montrant comment les câblages sont reliés entre eux selon
un deuxième mode de réalisation ; et

Fig.10 est un schéma
montrant un oscillogramme d'une tension de sortie selon le deuxième mode de
réalisation.
MEILLEURE MÉTHODE POUR RÉALISER L'INVENTION
Fig.2A et
Fig.2B montrent un premier mode de réalisation de la présente invention. Plus précisément, Fig.2A est une vue
en coupe longitudinale et Fig.2B est une vue en coupe prise dans la
ligne 1B --1B' de Fig.2A.
Se référant au Fig.2A
et Fig.2B, 3 indique un axe de rotation, formé d'un matériau non
magnétique et conduit par des moyens externes ; roulements 4a et 4b pour
soutenir l'arbre de rotation 3 ; 5a et 5b sont brides fournies
avec les roulements 4a et 4b, respectivement ; et 6 est une
Housse étui cylindrique pour accueillir les brides 5a et 5b.
Noyaux statoriques 7,
8, 9 et 10 est arrangées de façon à encercler l'arbre de rotation 3,
équidistant de lacunes g1 consentie entre les cœurs de stator
adjacent. Chacun des conducteurs du
stator 7, 8, 9 et 10 a la même coupe transversale de type arc.
Un
single-opposé-polarité N pôles rotor 11N et un single-opposé-polarité
S-pôle 11S sont fournis sur la rotation de l'arbre 3 afin d'être
en face de l'autre. Les rotors de
single-opposé-polarité 11N et 11S sont entourés par les noyaux
statoriques, 7, 8, 9 et 10, une petite rotation écart g0 fourni
entre le rotor unique-opposé-polarité et le noyau de stator.
Se référant au Fig.2B, enroulements 7c
et 9c sont fournis dans le sens horaire autour des noyaux statoriques 7
et 9, respectivement. Enroulements 8c
et 10c sont enroulés dans le sens anti-horaire autour des noyaux
statoriques 8 et 10, respectivement.
Les enroulements 7c, 8c, 9c et 10c sont reliées entre elles dans
une configuration décrite plus tard.
Fig.3A et Fig.3B montrent la seule opposition de polarité rotor 11N. En particulier, Fig.3A est une vue en coupe
longitudinale et postes est une vue en coupe.
Le rotor de single-opposé-polarité 11N a aimants en forme d'arc, 12
et 13 qui sont 180 degrés déplacés les uns des autres et sont magnétisées
telle que leurs surfaces qui doivent faire face le stator carottes 7-10 sont
N-pôles tandis que leurs surfaces internes sont S-pôles. Les aimants en forme d'arc, 12 et 13 sont
configurés pour faire correspondre le contour des noyaux statoriques, 7, 8,
9 et 10. Se référant aux postes, les
symboles N et N' sont utilisés afin de faire la différence entre les
aimants 12 et 13.
Un morceau de rotor 14
est positionné de façon à relier les aimants en forme d'arc, 12 et 13. La pièce de rotor 14 est magnétisée
par les aimants en forme d'arc, 12 et 13, afin qu'il soit surfaces quel
visage les aimants en forme d'arc, 12 et 13 sont S-pôles et est formé
d'une substance (par exemple, un acier de silicium) construite de l'acier bas
carbone avoir mélangé il contient plusieurs pour cent des métaux non ferreux,
soumis à un procédé de forgeage-cast. Le
noyau de fer, incarné par le morceau de rotor 14 ainsi construit se
caractérise par un champ magnétique bien équilibré, où la perméabilité
correspond approximativement à une valeur de crête dans un champ magnétique
unipolaire que le noyau de fer présente dans son milieu.
Fig.4A et Fig.4B montrent le rotor unique polarité opposée 11S. Plus précisément, Fig.4A est une vue
en coupe longitudinale, et Fig.4Best une vue en coupe. Le rotor de single-opposé-polarité 11A
a aimants en forme d'arc, 15 et 16 qui sont 180 degrés déplacés les uns
des autres et sont magnétisées telle que les surfaces celle-ci vers les noyaux
statoriques 7-10 sont S-pôles, tandis que leurs surfaces internes sont
N-pôles. Les aimants en forme d'arc, 15
et 16 sont configurés pour faire correspondre le contour des noyaux
statoriques, 7, 8, 9 et 10.
Un morceau de rotor 17 est positionné
de façon à relier les aimants en forme d'arc, 15 et 16. La pièce de rotor 17 est magnétisée
par les aimants en forme d'arc, 15 et 16, pour qu'il soit les surfaces
qui font face à des aimants en forme d'arc, 15 et 16 sont N-pôles. La pièce de rotor est issue d'une substance
construite à partir d'un acier bas carbone avoir mélangé dedans, plusieurs pour
cent des métaux non ferreux, soumis à un procédé de forgeage-cast. Le noyau de fer, incarné par le morceau de rotor 17
ainsi construit se caractérise par un champ magnétique bien équilibré, où
la perméabilité correspond approximativement à une valeur de crête dans un
champ magnétique unipolaire que le noyau de fer présente dans son milieu.
Les aimants en forme
d'arc, 12, 13, 15 et 16 ont la même longueur de circonférence, qui est
aussi égale à la longueur de l'arc formé par la circonférence des noyaux
statoriques, 7, 8, 9 et 10. Plus
précisément, cette longueur est obtenue en divisant toute la circonférence
hypothétique moins les lacunes g1 quatre par quatre. Fig.2A et Fig.2B, la rotation écart g0
est égale à R1 - R, où R1 est une distance entre le centre de
l'arbre de rotation 3 et la surface intérieure des conducteurs du stator
7-10, et R est la distance entre le centre de l'arbre de rotation 3
et la surface extérieure des rotors single-opposé-polarité 11N et 11S
comme il est indiqué dans Fig.3B et Fig.4B.
Fig.5A, Fig.5B et Fig.5C, montrent comment le câblage est relié
entre eux. T1 indique le début
d'un enroulement, T2 la fin d'un enroulement et 18 et 19 sorties. Plus précisément, Fig.5A montre une
configuration de la connexion série, Fig.5B une configuration de la
connexion série-parallèle et Fig.5C une configuration de la connexion en
parallèle. La configuration de la
connexion série permet la force électromotrice induite dans l'enroulement à
être additionnés et fournit une sortie haute tension. La configuration de la connexion en parallèle
permet aux courants issus de la force électromotrice induite dans l'enroulement
à être additionnés et fournit une sortie à grand courant.
Une description auront
maintenant, en ce qui concerne les Fig.6A, dernier et Fig.7, de
motorisation de la génération de la configuration de la connexion série.

Fig.6A est un diagramme montrant schématiquement comment le champ magnétique
tournant fournie par les rotors de single-opposé-polarité 11S et 11N traverse
enroulements 7c - 10c. Dernier montre
un chemin magnétique.
Se référant au Fig.6A,
Phi1 et Phi2 indiquent des flux magnétique rotatif tournant le long de la
circonférence 2Pi x R. dernier montre les aimants en forme d'arc 12
et 15 juste en face de la base de stator 7 sur toute leur longueur
et les aimants en forme d'arc 13 et 16 juste en face de la base de
stator 9 sur toute leur longueur.

Comme indiqué dans Fig.6B, le flux
magnétique Phi1 constitue un chemin magnétique comme suit :
Le rotor totale noyau de stator (S) - le
pôle de l'aimant en forme d'arc 12 (N) - 14 7 - la rotation écart g0
- l'aimant en forme d'arc 15 (S) - la pièce de rotor 17 (N).
Le flux magnétique Phi2 forme un
chemin magnétique comme suit :
Le rotor pièce 14 (S) - l'en forme
d'arc aimant 13 (N) - la rotation écart g0 - le stator core 9
- la rotation écart g0 - l'aimant en forme d'arc 16 (S) - la
pièce de rotor 17 (N).
Ainsi, un chemin
magnétique parallèle est formé. Dans cet
État, le flux magnétique Phi1 traverse l'enroulement 7c, et le
flux magnétique Phi2 traverse l'enroulement 9c.
On trouvera une
description sur la rotation du flux magnétique Phi1. Plus précisément, une description sera
donnée d'un changement dans la façon dont le flux magnétique Phi1
traverse les enroulements.
Se référant à un
oscillogramme d'une tension de sortie illustrée à la Fig.7, la totalité
du flux magnétique Phi1 traverse le bobinage 10c à un instant
t1. À un temps t2,
l'intégralité du flux magnétique Phi1 traverse l'enroulement 7c. À un temps t3, l'intégralité du flux
magnétique Phi1 traverse l'enroulement 8c. À un moment t4, l'intégralité du flux
magnétique Phi1 traverse l'enroulement 9c. À un instant t5, l'intégralité du flux
magnétique Phi1 traverse l'enroulement 10c. De cette manière, le flux magnétique Phi1 tourne
à vitesse constante pendant un temps T, dans le sens horaire en Fig.6A.
Entre le temps t1 et
t2, une force électromotrice ayant une forme d'onde triangulaire
descendant, j'ai a indiqué dans la Fig.7, est générée dans le bobinage 10c
due à une diminution du nombre de lignes de flux magnétique de flux
magnétique Phi traversant l'enroulement 10c. Une force électromotrice ayant une forme
d'onde triangulaire ascendante, indiquée par I' de la Fig.6, est généré
dans le bobinage 7c due à une augmentation du nombre de lignes de flux
magnétique de flux magnétique Phi traversant l'enroulement 7c. Par conséquent, une forme d'onde
rectangulaire positif obtenu par la somme de ces formes d'onde triangulaires
est sortie aux bornes de sortie 18 et 19.
Entre le temps t2 et
t3, une force électromotrice ayant une forme d'onde triangulaire
ascendante, indiqué par II la Fig.7, est générée dans le bobinage
7c due à une diminution du nombre de lignes de flux magnétique de flux
magnétique Phi traversant l'enroulement 7c. Une force électromotrice ayant une forme d'onde
triangulaire décroissant, indiqué par II' la Fig.7, est généré
dans la bobinage 8c due à une augmentation du nombre de lignes de flux
magnétique de flux magnétique Phi traversant l'enroulement 8c. Par conséquent, une forme d'onde
rectangulaire négatif obtenu par la somme de ces formes d'onde triangulaires
est sortie aux bornes de sortie 18 et 19.
Entre le temps t3 et
t4, une force électromotrice ayant une forme d'onde triangulaire
décroissant, indiqué par III dans la Fig.7, est générée dans la
bobinage 8c due à une diminution du nombre de lignes de flux magnétique
de flux magnétique Phi du flux magnétique Phi en traversant
l'enroulement 8c. Une force
électromotrice ayant une forme d'onde triangulaire ascendante, indiqué par III'
dans la Fig.7, est généré dans le bobinage 9c due à une
augmentation du nombre de lignes de flux magnétique de flux magnétique Phi traversant
l'enroulement 9c. Par conséquent,
une forme d'onde rectangulaire positif obtenu par la somme de ces formes d'onde
triangulaires est sortie aux bornes de sortie 18 et 19.
Entre temps t4 et t5,
une force électromotrice ayant une forme d'onde triangulaire ascendante,
indiqué par IV dans la Fig.7, est générée dans le bobinage 9c due
à une diminution du nombre de lignes de flux magnétique de flux magnétique Phi
traversant l'enroulement 9c.
Une force électromotrice ayant une forme d'onde triangulaire
décroissant, indiqué par IV' la Fig.7, est généré dans le
bobinage 10c due à une augmentation du nombre de lignes de flux
magnétique de flux magnétique Phi traversant l'enroulement 10c. Par conséquent, une forme d'onde
rectangulaire négatif obtenu par la somme de ces formes d'onde triangulaires
est sortie aux bornes de sortie 18 et 19.
Alors que le flux
magnétique Phi1 effectue une rotation, une force électromotrice ayant
une forme d'onde rectangulaire de synthèse et une période de T/2 est
sortie, comme illustré à la Fig.7.
Étant donné que le flux magnétique Phi2 apporte également une
rotation pendant que le flux magnétique Phi1 fait une rotation et
délivre une puissance d'une force électromotrice ayant une forme d'onde
rectangulaire similaire, l'ampleur de la force électromotrice obtenue entre les
bornes 18 et 19 est en fait doubler cette Fig.7 indiqué dans.
De cette façon, cette
réalisation permet d'annuler un champ magnétique de compteur et de fournir un
générateur asynchrone ayant une paire de pôles magnétiques de la même polarité
opposés les uns aux autres par rapport à un axe de rotation et caractérisées
par une efficacité de conversion de haute énergie. Notre pratique d'exploitation a confirmé que
le générateur comportant la construction de cette incarnation fournit un
rendement de conversion de l'énergie qui est assez élevé d'exiger seulement 1 /
5,2 du couple moteur pour le générateur conventionnel.
Fig.8a et
Fig.8B montrent un deuxième mode de réalisation de la présente invention. Plus précisément, Fig.8A est une vue
en coupe longitudinale, et Fig.8B est une vue en coupe prise dans la
ligne 7B -- 7B' de Fig.8A.
Se référant au Fig.8A
et Fig.8B, 3 indique un axe de rotation, formé d'un matériau non
magnétique et poussé par une source externe ; 4 a et 4 b sont les roulements
qui soutiennent l'arbre de rotation 3, 5 a et 5 b sont brides abritant les
roulements 4a et 4b et 6 est une Housse étui cylindrique pour accueillir
les brides 5a et 5b.
Noyaux statoriques 7,
8, 9 et 10 est arrangées de façon à encercler l'arbre de rotation 3,
équidistant de lacunes g1 consentie entre les cœurs de stator
adjacent. Chacun des conducteurs du
stator 7, 8, 9 et 10 a un même arc comme la coupe transversale.
Un
single-opposé-polarité N pôles rotor 11N et un single-opposé-polarité
S-pôle 11S sont fournis sur la rotation de l'arbre 3 afin d'être
en face de l'autre. Les rotors de
single-opposé-polarité 11N et 11S sont entourés par les noyaux
statoriques, 7, 8, 9 et 10 un écart g0 petite rotation assurée
entre le rotor unique-opposé-polarité et le noyau de stator.
Se référant à Fig.8B, enroulements 7c
et 9c sont fournis dans le sens horaire autour des noyaux statoriques 7
et 9, respectivement. Enroulements 27c et 29c sont fournis dans le
sens anti-horaire autour des noyaux statoriques 7 et 9, respectivement.
Enroulements 8c et 10c sont fournis dans le sens antihoraire dans les
noyaux statoriques 8c et 10c, respectivement. Enroulements 28c et 30c sont enroulés
dans le sens horaire autour des noyaux statoriques 8 et 10,
respectivement. Les enroulements 7c, 8c, 9c, 10c, 27c, 28c, 29c et 30c sont
reliés entre eux selon une configuration décrite plus loin.
Un capteur magnétique
(pour la détection de position de rotation) 31 est fourni entre les noyaux
statoriques, 7 et 10 et un capteur magnétique (pour la détection de
position de rotation) 32 est fourni entre les noyaux statoriques 7 et
8. Les capteurs magnétiques, 31 et 32
détectent le champ magnétique afin de déterminer la position des rotors
single-opposé-polarité 11N et 11S au cours de leur rotation.
Les rotors de
single-opposé-polarité 11N a une configuration comme sur la Fig.3A
et des postes, et le rotor de monopole 11S a une configuration comme sur
la Fig.4A et Fig.4B.
Le rotor de
single-opposé-polarité 11N a aimants en forme d'arc, 12 et 13 qui
sont 180 degrés déplacés les uns des autres et sont magnétisées telle que leur
surface vers les noyaux statoriques est N-poteaux, tandis que leurs surfaces
internes respectifs sont S-poles. Les
aimants en forme d'arc, 12 et 13 sont configurés pour faire correspondre
le contour des noyaux statoriques, 7, 8, 9 et 10.
Une pièce de rotor 14
est positionné de manière à relier les aimants en forme d'arc 12 et 13. La pièce 14 de rotor est réalisé
à partir d'un acier à bas carbone ayant plusieurs pour cent de métaux non
ferreux, en utilisant un procédé de forgeage de coulée. Le noyau de fer rotor pièce 14 construit
par ce moyen, a un champ magnétique équilibré, où la perméabilité se rapproche
d'une valeur de pic dans un champ magnétique unipolaire ce que le noyau de fer
présente à son environnement.
Les 11S du rotor
opposée unique polarité comporte des aimants en forme d'arc 15 et 16 qui
sont positionnées à 180 degrés l'une de l'autre et sont aimantés de telle sorte
que leurs surfaces qui font face aux noyaux de stator sont des pôles S,
tandis que leurs surfaces intérieures sont des N-pôles. Les aimants en forme d'arc 15 et 16 sont
conformées et positionnées de manière à correspondre au contour des noyaux
statoriques 7, 8, 9 et 10.
Une pièce de rotor 17
est positionné de manière à relier les aimants en forme d'arc 15 et 16. La pièce 17 de rotor est réalisé à
partir d'un acier à bas carbone ayant plusieurs pour cent de métaux non
ferreux, en utilisant un procédé de forgeage de coulée. Le noyau de fer rotor pièce 17 construit
par ce moyen, a un champ magnétique équilibré, où la perméabilité se rapproche
d'une valeur de pic dans un champ magnétique unipolaire lequel le noyau de fer
présente à son environnement.
Les aimants en forme
d'arc 12, 13, 15 et 16 ont la même longueur circonférentielle, qui est
égale à la longueur de l'arc formé par la périphérie des noyaux statoriques 7,
8, 9 et 10. Plus précisément,
cette longueur est obtenue en divisant par quatre, toute la circonférence
hypothétique moins le quatre lacunes g1.
En se référant aux Figs. 3A, 3B, 4A, 4B et 8, de l'écart de
rotation g0 est égale à R1 - R.
Fig.9 montre comment les câblages sont reliés les uns aux autres. T1 indique le début d'un enroulement, T2 à la
fin d'un enroulement, et 18 et 19 sont des bornes de sortie. Deux circuits en série sont formées par des
enroulements. Les commutateurs SW1 et
SW2 sont utilisés pour la sélection des circuits série respectifs. Un circuit de commande de commutation 40,
qui traite un signal de détection provenant des capteurs magnétiques 31 et
32, commande les commutateurs SW1 et SW2 de manière sélective en
fonction du signal de détection.
Comme le montre la Fig.9,
le premier circuit série comprend le 7c enroulement dans le sens horaire
prévu dans le noyau de stator 7, enroulement 8c connecté en série
avec l'enroulement et 7c prévu dans le sens antihoraire dans le noyau de
stator 8 adjacent au noyau de stator 7; enroulement 9c
connecté en série avec l'enroulement 8c prévue dans le sens horaire et
dans le noyau de stator 9; et l'enroulement 10c en série avec
l'enroulement et 9c prévu dans le sens antihoraire dans le noyau de
stator 10 adjacent au noyau de stator 9.
Comme le montre la Fig.9,
le second circuit série comprend l'enroulement 27c prévue dans le sens
antihoraire dans le noyau de stator 7; enroulement 28c connecté
en série avec l'enroulement 27c prévue dans le sens horaire et dans le
noyau de stator 8; enroulement 29c connecté en série avec
l'enroulement et 28c prévue dans le sens antihoraire dans le noyau de
stator 9; et l'enroulement 30c en série avec l'enroulement 29c
prévu dans le sens horaire et dans le noyau de stator 10.
Conformément à la
construction décrite ci-dessus, un champ magnétique rotatif qui provoque
l'induction électromagnétique dans les noyaux de stator 7-10 successivement
est créé par les aimants en forme d'arc 12, 13, 15 et 16 lorsque la
seule opposition de polarité rotors 11N et 11S sont pivotée. Comme on l'a déjà expliqué en référence à la Fig.6A,
Fig.6B et la Fig.7, que les lignes de flux magnétique traversant
l'un des enroulements de l'augmentation 7c-10c en nombre, les lignes de
flux magnétique traversant la adjacent l'un des enroulements 7c-10c
diminuer en nombre. Autrement dit, les
lignes de flux magnétique augmente et diminue périodiquement par rapport à une
donnée d'enroulement de sorte qu'une première force électromotrice, ayant une
forme d'onde rectangulaire similaire à celui représenté sur la Fig.7 et
une période qui est la moitié de la période de rotation, est sortie du premier
circuit série (7c-10c).
Comme les lignes de
flux magnétique traversant l'un des enroulements de l'augmentation 27c-30c en
nombre, les lignes de flux magnétique traversant l'une à côté de la diminution
des enroulements 27c-30c en nombre.
Autrement dit, les lignes de flux magnétique augmente périodiquement et
diminuent par rapport à une donnée d'enroulement de telle sorte qu'une seconde
force électromotrice d'une forme d'onde rectangulaire de 180 degrés hors de
phase avec la première force électromotrice et ayant la même période que la
première force électromotrice est émise à partir de le second circuit série (27c-30c). Autrement dit, la seconde force
électromotrice est de 180 degrés hors de phase avec la force
contre-électromotrice représenté sur la Fig.7.
En se référant à la Fig.10, en
fonction du signal de détection provenant des capteurs magnétiques 31 et 32,
les commutateurs SW1 et SW2 effet de commutation à intervalles de 90
degrés. Par ce moyen, les composantes
positives I et III de la première force électromotrice présentant une forme
d'onde rectangulaire et fournies à partir du premier circuit série, et les
composantes positives II et IV de la seconde force électromotrice présentant
une forme d'onde rectangulaire et fournis par le second circuit en série sont
choisis alternativement à 180 degrés d'intervalle et de sortie aux bornes de
sortie 18 et 19.
Cela signifie que, ce mode de réalisation
assure une conversion d'énergie à haut rendement, dans lequel un champ
magnétique est annulé compteur, et une force électromotrice à courant continu
ayant un niveau positif est correctement synthétisé et sortie. Il est bien
entendu possible de synthétiser et délivrer en sortie un courant continu une
force électromotrice négative en décalant la synchronisation de commutation de
180 degrés.
APPLICATION
INDUSTRIELLE
Comme cela a été décrit, selon la présente
invention, la rotation des premier et second rotors à simple polarité opposée
génère un champ magnétique tournant qui entraîne une induction en un nombre
pair de noyaux de stator successivement.
Comme les lignes de flux magnétique traversant l'un des enroulements par
l'intermédiaire du premier quart d'augmenter en nombre, les lignes de flux
magnétique traversant la adjacent l'un des enroulements par l'intermédiaire du
premier quart diminuent en nombre.
Autrement dit, les lignes de flux magnétique augmente et diminue
périodiquement par rapport à un enroulement donné. La force électromotrice générée dans les
lignes de flux magnétique traversant une augmentation enroulement en nombre et
la force contre-électromotrice générée en tant que les lignes de flux magnétique
traversant une diminution de l'enroulement adjacent dans nombre sont
synthétisés de sorte qu'une force électromotrice périodique alternatif ayant
une forme d'onde rectangulaire est générée sur la la synthèse et la sortie. De cette façon, une conversion d'énergie à haut rendement, dans lequel
un champ magnétique est annulé compteur est fourni.
Selon le premier circuit série de la
présente invention, la rotation des premier et second rotors à simple polarité
opposée génère un champ magnétique tournant qui entraîne une induction en un
nombre pair de noyaux de stator successivement.
Comme les lignes de flux magnétique traversant l'un des premier à
quatrième enroulements augmentent en nombre, les lignes de flux magnétique
traversant l'un adjacent des premier à quatrième enroulements diminuent en
nombre. Autrement dit, les
lignes de flux magnétique augmente et diminue périodiquement à un enroulement
donné. En conséquence, la première force
électromotrice présentant une forme d'onde rectangulaire est générée. Selon le
deuxième circuit en série, comme les lignes de flux magnétiques traversant
l'une des cinquième par-huitième enroulements augmentent en nombre, les lignes
de flux magnétique traversant le côté un des cinquième par-huitième
enroulements diminuent en nombre.
Autrement dit, les lignes de flux magnétique augmente et diminue
périodiquement à un enroulement donné.
En conséquence, la seconde force électromotrice 180 degrés en opposition
de phase avec la première force électromotrice et ayant la même période que la
première force électromotrice est générée.
En fonction du signal de détection provenant du moyen position de
rotation de détection, le moyen de commutation provoque sélectivement les
composantes positives de la première force électromotrice fournie par le
premier circuit en série, ou les éléments positifs de la seconde force
électromotrice fournie par le second circuit en série soient sortie à des
intervalles de 180 degrés. De cette
façon, la force électromotrice est synthétisé CC et la sortie. Cela se traduit
par une conversion d'énergie à haut rendement où un champ magnétique est annulé
compteur.
En plus de nombreuses
applications dans les centrales électriques, les bateaux, les avions etc, la
présente invention peut trouver des applications domestiques ou peut être
facilement adapté pour des utilisations de loisirs.
LARRY JAMISON: SOURCE D'ÉNERGIE ÉLECTRIQUE
Demande de brevet UE 82 400 992 2
22nd Décembre1982
Inventeur: Larry T. Jamison
SOURCE
D'ÉNERGIE ÉLECTRIQUE UTILISANT ENERGISANT
Cette demande de brevet
montre les détails d'un dispositif qui elle est revendiquée, peut produire de
l'électricité sans besoin de n'importe quel carburant. Il est à noter que bien que les détails de
construction sont fournis qui impliquent que l'inventeur construit et testé
plusieurs de ces dispositifs, c'est seulement une demande et pas un brevet
délivré.
RÉSUMÉ
Un système produisant
de l'énergie est fourni qui produit de l'énergie pour l'utilisation, par
exemple, dans un véhicule électrique ou dans une maison centrale. Le système comprend un électrificateur électrique (60), y compris
un enroulement double rotor et un stator bobiné double, pour la production
d'énergie électrique qui est stocké dans le système, par exemple dans un
arrangement de stockage batterie (66), qui fournit une excitation
initiale du système. l'énergie stockée
est fournie à un moteur électrique (68) qui entraîne l'électrificateur (60)
pour ainsi créer une énergie supplémentaire.
l'électrificateur est en mesure de répondre aux besoins du système ainsi
qu'une charge de puissance.
CONTEXTE DE
L'INVENTION
La présente invention
se rapporte aux systèmes de production d'énergie et, plus particulièrement, à
un système d'électrificateur-moteur électrique pour fournir de l'énergie, par
exemple, pour un véhicule automobile ou dans le cadre d'une usine d'énergie à
la maison.
Avec l'avènement de la
soi-disant " crise de l'énergie " et la recherche qui en découle pour
les sources d'énergie alternatives à substituer à l'huile, une attention
considérable a été axée sur les véhicules automobiles comme chef aux
utilisateurs des produits pétroliers.
Un des aspects de cette recherche a favorisé le regain d'intérêt pour
les véhicules fonctionnant à l'électricité tels que des voitures
électriques. Une lacune principale de
l'état de la technique des véhicules électriques a été le besoin de recharger
les batteries qui fournissent l'alimentation pour le système de motorisation
électrique.
La présente invention
permet de surmonter ce problème grâce à la fourniture d'un système
d'électrificateur-moteur électrique qui produit plus d'énergie qu'est vide,
permettant ainsi à l'excès d'énergie être stockés dans le système de batterie,
pour être utilisé comme requis. Ainsi,
la nécessité pour la recharge des batteries associés aux véhicules électriques
conventionnelles est éliminée avec le système de cette invention. Il est à noter que tandis que le système de
l'invention a énorme potentiel dans le cadre de son utilisation dans les véhicules
électriques, le système n'est clairement pas limité à un tel usage et serait
évidemment avantageux lorsqu'il est utilisé, par exemple, comme source
d'énergie pour une centrale d'énergie à la maison, ainsi que dans de nombreuses
autres applications.
Selon l'invention et de
l'énergie, fabrique des systèmes du type décrit ci-dessus est fourni qui
comprend et électrique " électrificateur " comprenant au moins un
double enroulement stator et au moins un double enroulement monté sur l'arbre
rotor situé à l'intérieur d'un logement, de l'électricité énergie recueillie
dans le rotor à travers un électrique décollage dispositif approprié et être
disponible pour utilisation par le système et un moteur électrique, alimenté
par l'électrificateur à la conduite de l'arbre du rotor de
l'électrificateur. Un arrangement de
batterie est initialement utilisé pour fournir de l'énergie au système et,
comme indiqué ci-dessus, l'énergie excédentaire générée par l'électrificateur
en sus de celui requis par le système et la charge du système, est stocké par
le biais de charge des batteries. Le
moteur comprend un squelette avec une pluralité de bobinage emplacements dedans
et espacées d'une pluralité des enroulements étant enroulé sur sa circonférence
en deux emplacements dans l'armature, c'est-à-dire un enroulement est enroulé
par un premier emplacement (par exemple emplacement 1) et revient dans une
deuxième fente espacée (p. ex. emplacement 5).
Selon la demande énergétique, l'électrificateur peut inclure une paire
de stators et rotors, avec les rotors sont montés sur le même arbre. Le moteur est sous tension préférence grâce à
une entente d'un commutateur et décollage brosses du pluriel, alors qu'une
bague collectrice et brosses associés connecté à une forme de circuit de pont
de sortie l'énergie pour l'électrificateur.
Autres caractéristiques
et avantages de l'invention seront montrés dans la description détaillée des
modes de réalisation préférés qui suit.
Fig.1 est une vue en
élévation partiellement en coupe de la "électrificateur" électrique
de l'invention.
Fig.2 est un schéma fonctionnel du système global de production d'énergie de
l'invention
Fig.3 est une vue altitudinal côté partiellement sectionné d'un moteur
électrique modifié construits selon l'invention.
Fig.4 est une vue en
perspective éclatée des éléments de base du moteur de Fig.3.
Fig.5 est une vue de
l'extrémité du porte-brosse également illustré en est une vue en perspective
éclatée des éléments de base du moteur de Fig.4.

Fig.6 et Fig.7 montrer le détail des enroulements du moteur de la Fig.3.

Se référant à la Fig.1,
un mode de réalisation préféré de l'appareil " électrificateur " de
cette l'invention est montré. Le
dispositif comprend un boîtier 10, dans lequel sont situés, dans une
première chambre ou compartiment 10a, un premier rotor 12 et un
stator premier 14 et, dans un second compartiment 10b, un
deuxième rotor 16 et un deuxième stator 18. Il est à noter que même si les deux
combinaisons de stator-rotor sont utilisés dans cette réalisation, une
combinaison unique de stator-rotor peut être utilisée pour certaines
applications. Boîtier 10 est divisée en
compartiments 10a et 10b, par un centre de la plaque 20 et il comprend une paire de plaques latérales 22
et 24. Les deux rotors 12, 16 et les stators, 14, 18 sont
enroulés double et les rotors, 12, 16 sont imbriqués à l'intérieur de
leurs respectifs stators 14 et 18 et montés pour la rotation sur le même
arbre 26. Arbre 26 s'étend
longitudinalement par logement 10 et est monté sur roulements, 28 et
30, soutenu par des plaques d'extrémité 22 et 24, et un autre
portant 32 qui est pris en charge par la plaque centrale 20.
Une paire de bagues
collectrices 34 et 36, sont montés sur l'arbre 26 et se connecter
avec leurs paires correspondantes de brosse 38 et 40.
Bagues collectrices 34 et 36 sont
reliés respectivement aux rotors 12 et 16 et permettre le courant
circulant dans les enroulements du rotor à percevoir à travers les paires
associées de brosses, 38 et 40.
Brosse paires 38 et 40 sont montés sur des porte-balais
respectifs 42 et 44. Les bornes
du pont respectif circuits 46 et 48 sont reliés au stator 14 et 18,
tandis que les barres de conversion 50 et 52 sont connectés à
porte-balais 42 et 44, comme il est indiqué.
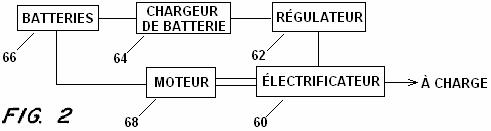
Un ventilateur de refroidissement 54,
est également monté sur l'arbre 26 et une pluralité d'ouvertures 201,
22a et 24a sont fournis dans la crapaudine 20 et plaques
latérales 22 et 24, pour favoriser le refroidissement de
l'appareil. L'électrificateur Fig.1
est préférablement incorporée dans un système comme indiqué de manière très
schématique dans Fig.2, où la sortie de l'électrificateur est utilisée
pour fournir l'énergie pour un moteur d'entraînement. À cette fin, l'électrificateur, ce qui est
dénoté par 60 dans la Fig.2, est reliée par un régulateur 62,
chargeur de batterie 64 pour batteries 66 connecté à un moteur de
68. Ces batteries 66 sont
utilisés pour fournir la mise sous tension initiale du système aussi bien quant
à stocker l'énergie produite par l'électrificateur 60. On comprendra que l'électrificateur 60 fournit
l'énergie suffisamment pour alimenter le moteur 68 (qui, à son tour,
conduit électrificateur 60 par rotation de l'arbre 26) ainsi que
pour fournir le stockage de l'énergie dans le système. Il sera aussi apprécié que le système
illustré schématiquement Fig.2 inclut des contrôles adéquats
(commutateurs, rhéostats, capteurs, etc.) pour fournir l'excitation initiale,
mais aussi un contrôle opérationnel approprié du système.
Dans un mode de
réalisation préféré, moteur 68 est sous la forme indiquée dans la Fig.3. Tel qu'illustré, le moteur est d'une forme
généralement conventionnelle (avec des exceptions notées ci-dessous) et
comprend une armature 70, montée sur un arbre 72 dans boîtier 74. Boîtier 74 comprend une paire de
plaques latérales 76 et 78, et monter les paliers de l'arbre 77 et 79. Ouvertures 76 a et 78 a sont fournis avec les plaques d'extrémité
76 et 78 et un ventilateur 80 est monté sur l'arbre 72 pour
assurer le refroidissement.
Un commutateur 82 est également monté
sur l'arbre 72 et travaille en collaboration avec brosses associés (non
illustrés à la Fig.1), pour conduire le courant aux enroulements de
l'induit 70. Cette coopération
est montrée meilleure dans la Fig.4, qui est une vue éclatée, illustrant
l'armature 70, commutateur 82 et un support de brosse 84.
Comme illustré à la Fig.5, le support
de brosse 84 comprend huit monts pinceau 86, chacune d'elles
définit une fente 88 dans laquelle est montée une paire de brosses. Un pinceau 90 apparaît en Fig.5,
étant entendu que deux de ces brosses sont montés dans chaque fente 88 afin
que les seize brosses sont nécessaires.
Le moteur de la Fig.3
à Fig.6 comprend huit chaussures pole (non illustrés) qui sont attachées à
servir de logement 74 et qui pour monter les huit bobines ou
enroulements 92 (voir Fig.3 et Fig.4) espacées autour de
la périphérie de l'armature 72.
Une caractéristique
importante du moteur de la Fig.3 à Fig.6 concerne la manière dont les
bobinages d'induit 70 sont enroulés.
Comme illustré à la Fig.3,
Fig.6 et Fig.7, un typique W1 enroulement enroule dans deux
emplacements, avec l'enroulement illustré étant doublé dos et continue de fente
induit S1 à fente induit S5 (voir Fig.3 et Fig.6). De même, l'enroulement en fente S2 continue
à fente S6, l'enroulement de fente que S3 continue à fente S7,
et ainsi de suite pour les enroulements de quarante-neuf.
Dans un mode de
réalisation préféré spécifique, la décrit ci-dessus est un moteur de 48 volts
et 412 chevaux ayant un haut vitesse de travail de 7 000 tr/min. Un contrôle de rhéostat (non illustré) est
utilisé pour contrôler la tension d'entrée et, comme indiqué plus haut, le
moteur est alimenté par l'électrificateur Fig.1. Il sera apprécié que le décollage de
l'énergie du système est de préférence de l'arbre de sortie du moteur, bien que
l'énergie électrique peut également être tapé de la sortie de
l'électrificateur.
TERUO KAWAI: COP=1.6 MOTEUR ÉLECTRIQUE
Brevet US 5 436 518 25 juillet1995 Inventeur: Teruo Kawai
DISPOSITIF DE
PRODUCTION D'ÉNERGIE MOBILE
Veuillez noter qu'il
s'agit d'un extrait de re-formulation de ce brevet. Il décrit un moteur qui
dispose d'une sortie d'alimentation 60 % plus élevée que sa puissance d'entrée.
RÉSUMÉ DE
L'INVENTION
C'est un objet de
l'invention d'un dispositif de génération de puissance motrice dans lequel la
présence d'une force qui agit dans le sens inverse le sens du mouvement d'un
rotor et un stator est empêchée, pour permettre une utilisation efficace de
l'énergie électrique à appliquer aux électro-aimants, ainsi que l'énergie
magnétique généré par un aimant permanent.
Afin d'atteindre
l'objet ci-dessus, la première invention comprend un aimant permanent disposé autour
d'un axe de rotation de sortie qui est monté sur un roulement, un corps
magnétique placé concentrique avec l'aimant permanent pour la rotation de
l'arbre, le corps magnétique, subir le flux magnétique de l'aimant permanent,
une pluralité d'électro-aimants montés à demeure sur le membre de soutien afin
qu'ils soient espacés d'une distance prédéterminée sur la périphérie du
matériau magnétique, chaque circuit magnétique des électro-aimants étant
indépendant des uns des autres et le mécanisme de passage d'excitation
d'électro-aimants qui peut magnétiser séquentiellement un des électro-aimants
qui est positionné vers l'avant, en ce qui concerne un sens de rotation, de
l'arbre de sortie, afin de conférer à l'électro-aimant une polarité magnétique
magnétique opposée à celle du pôle magnétique de l'aimant permanent, auquel cas
un flux magnétique traversant le corps magnétique converge dans une seule
direction, appliquant ainsi un couple de rotation de l'arbre de sortie.
Selon la première
invention, lorsqu'un des électro-aimants qui se positionne en avant dans le
sens de rotation de l'arbre de rotation, un champ magnétique créé par
l'électroaimant excité et un champ magnétique créé par l'aimant permanent
interagir entre eux. Ainsi, le flux
magnétique traversant le corps magnétique converge vers l'électro-aimant sorti,
afin de faire tourner l'arbre de sortie de rotation selon un angle prédéterminé
vers l'électroaimant excité. Lorsque
l'axe de rotation de sortie a subi une rotation de l'angle prédéterminé, l'électroaimant
excité ci-dessus est hors magnétisé, et un autre électro-aimant actuellement
positionné en avance en ce qui concerne le sens de rotation de l'arbre de
sortie du rotor est excité ou magnétisé.
Excitation séquentielle des électro-aimants de la manière ci-dessus
permet la rotation de l'arbre de sortie dans un sens prédéterminé. À cet égard, il est à noter que les
électro-aimants sont excités afin d'avoir une polarité magnétique opposée à
celle du pôle magnétique de l'aimant permanent et que le circuit magnétique
d'électro-aimants excités est indépendant de ceux des électro-aimants
adjacents. Ainsi, le flux magnétique
généré par l'électroaimant excité est empêché de passer par des circuits
magnétiques des électro-aimants adjacentes, qui, si elle survient, peuvent
causer des électro-aimants être magnétisé pour avoir la même polarité que celle
du pôle magnétique de l'aimant permanent.
En conséquence, aucune force répréhensible ne sera généré qui puisse
gêner la rotation de l'arbre de sortie.
Afin d'atteindre
l'objet ci-dessus, la deuxième invention comprend un aimant permanent, monté
sur un corps mobile disposé de façon mobile une piste linéaire, un corps
magnétique monté sur l'aimant permanent, le corps magnétique étant soumis à un
flux magnétique de l'aimant permanent, une pluralité d'électro-aimants espacés
une distance appropriée le long de la piste linéaire, les électro-aimants ayant
des circuits magnétiques qui sont indépendants des uns et le mécanisme
d'excitation disposées à magnétiser chacune des électro-aimants dans l'ordre où
chacun est placé à l'avant de la mobile de la carrosserie, (en ce qui concerne
le sens du mouvement) afin de conférer à l'électroaimant excité une polarité
magnétique opposée à celle du pôle magnétique de l'aimant permanent, auquel cas
un flux magnétique traversant le corps magnétique converge en direction
prédéterminée afin de provoquer un mouvement linéaire de la mobile de la
carrosserie.
Selon la deuxième invention, lorsque l'électro-aimant positionné avant l'extrémité
avant du corps mobile en ce qui concerne le sens du mouvement du corps mobile
est excité, un champ magnétique généré par l'électroaimant excité et le champ
magnétique généré par l'aimant permanent interagissent entre eux. Ainsi, un flux magnétique traversant le corps
magnétique converge vers l'électroaimant excité, afin de déplacer le corps
mobile une distance prédéterminée vers l'électroaimant excité. Quand le mobile de la carrosserie a été
déplacé la distance prédéterminée, le mobile de la carrosserie est positionné
sous l'électroaimant excité ci-dessus, et un autre électro-aimant est
positionné avant l'extrémité avant du corps mobile. Lorsque cela se produit, l'excitation de
l'électro-aimant positionné au-dessus du corps de meuble est interrompue, et
l'excitation de l'électro-aimant est maintenant positionné avant de l'extrémité
avant du corps mobile est lancée.
Excitation séquentielle des électro-aimants de la manière ci-dessus
permet le mouvement du corps mobile dans une direction prédéterminée, qu'il est
à noter qu'aucune force inacceptable qui pourrait gêner la circulation du corps
mobile n'est créée pour la même raison que qui a expliqué en ce qui concerne la
première invention.
BRÈVE
DESCRIPTION DES DESSINS
Fig.1 représente une
vue altitudinale devant, en partie dans la section et omis en partie, d'un
moteur après une première réalisation de l'invention ;
Fig.2 est une vue en coupe le long de la ligne II--II en Fig.1;
Fig.3 est une vue d'élévation arrière du moteur muni d'un plateau de
pare-lumière à ce sujet;
Fig.4A par Fig.4H illustrent le fonctionnement du moteur lorsque
électro-aimants sont excités ou aimantés ;

Fig.5A est une illustration vue montrant un chemin magnétique de flux
magnétique créé par un aimant permanent du moteur lorsque les électro-aimants
ne sont pas magnétisés ;

Fig.5B est une vue illustration montrant un chemin magnétique de flux
magnétique créé par l'aimant permanent du moteur, et le chemin magnétique de
flux magnétique créé par les électro-aimants ;
Fig.6 par Fig.9 sont vues en coupe illustrant une forme modifiée
du moteur ;


Fig.10A par Fig.10C sont vues en coupe illustrant le
fonctionnement du moteur modifié ;
Fig.11A par Fig.11H sont illustratifs diagrammes montrant le
fonctionnement d'un moteur sous la forme d'un moteur linéaire selon une
deuxième réalisation de l'invention ;
DESCRIPTION DÉTAILLÉE DES MODES DE RÉALISATION PRÉFÉRÉS
Modes de réalisation
préférés de l'invention seront expliqués en détail ci-dessous à l'aide des
attachés. Selon une première
réalisation de l'invention, un arbre de rotation sortie 11 est monté
dans un roulement entre avant et arrière côté plaques 10 a d'un membre
de soutien 10 par l'intermédiaire de roulements 11A, comme
indiqué dans la Fig.1 et Fig.2.
Un anneau d'aimants permanents 13 sont montés sur les extrémités
opposées de l'arbre de sortie, à l'intérieur des plaques latérales 10A
et ceux-ci se déplacent avec l'arbre du rotor 11. Les aimants permanents sont magnétisés dans
le sens axial. Un corps magnétique 14
est monté de façon rigide entre chacune des plaques côté 10 a de
l'arbre du rotor 11 et les aimants permanents 13. Chacun de ces organes magnétiques 14A
remplaçant encoches 11A et dents magnétiques 14B. Il est à noter que le flux des aimants
permanent 13 traverse les corps magnétiques respectives 14. Par exemple, la Fig.1 montre le corps
magnétique 14 avec trois encoches 14A et trois dents magnétiques 14B. Les aimants permanents 13 et corps
magnétiques 14 sont positionnés coaxialement avec l'arbre de sortie du
rotor 11. Les aimants permanents
correspondants organes 13 et magnétiques 14 apparaissent
connectés ensemble par boulons 15 de manière à former un rotor 12 qui
est attaché à l'axe de rotation de sortie 11.
Il est à noter que le
membre de soutien 10 et l'arbre de rotation de sortie sont tous deux
fabriqués dans un matériau non magnétique.
Les membres de soutien 10 peuvent être formés, par exemple, en
acier inoxydable, alliages d'aluminium, ou des résines synthétiques, tandis que
l'axe de rotation de sortie 11 peut-être être formé en acier inoxydable,
par exemple. Ainsi, le circuit
magnétique formé par l'aimant permanent 13 et corps magnétique à une
extrémité axiale de l'axe de rotation de sortie 11 et circuit magnétique
formé par l'aimant permanent 13 et corps magnétique à l'extrémité
opposée axiale de l'arbre de sortie, sont indépendants des uns des autres. Les corps magnétiques 14 peuvent être
constituées de matériaux magnétiques ayant une haute perméabilité magnétique,
tels que les divers genres de matériaux en acier, tôles d'acier au silicium,
permalloys ou similaires.
Le stator contient des
électro-aimants 16a à 16l, qui sont placés entre le côté
plaques 10a. Les électro-aimants
sont équidistants autour les pièces magnétiques 14 afin qu'ils entourent
les corps magnétiques. Comme illustré à
la Fig.1, douze électroaimants peuvent être utilisés. Le circuit magnétique de chacun des
électro-aimants 16a à 16l est arrangées de façon à être indépendant des
uns des autres, afin que sans flux d'un électro-aimant aimanté passe par les
noyaux de fer d'électro-aimants adjacents.
Les noyaux de fer des
électro-aimants sont de 16a à 16l placé parallèlement à l'axe d'axe
rotor 11 et placée avec seulement un léger écart entre eux et les corps
magnétiques 14.
Certains des
électro-aimants 16a à 16l se trouvent à une position correspondant aux
portions limite 14c1 à 14c6 entre l'encoche 14a et
la dent magnétique 14b. Par
exemple, comme illustré à la Fig.1, électro-aimants 16a, 16b, 16e,
16f, 16i et 16j sont positionnées en face de parties de la frontière 14c1,
14c2, 14c3, 14c4, 14c5 et 14c6, respectivement.
Fig.5 a montre un
chemin d'accès de flux magnétique créé par l'aimant permanent 13 lorsque
les électro-aimants ne sont pas excités ou magnétisés, tandis que, Fig.5B
montre un chemin d'accès de flux magnétique créé par l'aimant permanent 13 et
un chemin d'accès de flux magnétique créé par les enroulements
d'électro-aimants lorsque les électro-aimants sont magnétisées. Comme le ressort de la Fig.5A et
Fig.5B, les deux chemins d'accès de flux magnétique représentent une
distribution unipolaire dans laquelle les pôles N ou S-pôle apparaît
uniformément axial aux extrémités opposées.
Lorsque les électro-aimants sont magnétisés, les champs magnétique de
l'aimant permanent et des électro-aimants coopérer ou interagir entre eux afin
de générer un couple de rotation.
Mécanisme de passage de excitation 17 séquentiellement excitant ou par
polarisation électro-aimants 16a à 16l est essentiellement composé d'un
circuit d'excitation classiques pour l'approvisionnement de courant continu à
chaque enroulements d'électro-aimants de 16a à 16l. Dans cette réalisation, la partie inverseur
pour changer électrique d'alimentation pour les électro-aimants 16a à 16l
comprend une pluralité de capteurs optiques 18 et une plaque
pare-lumière 19 pour transformer les capteurs optiques SUR et DE comme
sur la Fig.6.
Les capteurs optiques 18
sont espacés l'un de l'autre avec un espace entre eux pour permettre la
plaque pare-lumière 19 de passer à travers un feu émettant l'élément et
un élément récepteur de lumière. Les
capteurs optiques 18 sont disposées à la surface externe de l'une des
plaques latérales 10a également espacés le long de la circonférence,
afin qu'ils soient positionnés pour correspondre aux électro-aimants 16a à
16l (par exemple, le capteur optique 18 est montré être disposé dans
la surface extérieure de la plaque arrière).
La lumière blindage plaque 19 est fixée à l'axe de rotation de
sortie 11 à la fin de celui-ci, la lumière blindage plaque qui dépassent
de la plaque arrière 10 a sur laquelle sont montés les capteurs
optiques.
Selon le mode de réalisation
illustré, lorsqu'un capteur optique particulier 18 est bloqué par la
lumière blindage plaque 19, l'électro-aimant correspondant à tel capteur
optique 18 est approvisionné en électricité.
Nous expliquerons le
fonctionnement du premier mode de réalisation décrit ci-dessus en ce qui
concerne les Fig.4A à Fig.4H.
Lorsque les
électro-aimants 16a à 16l ne sont pas approvisionnés en électricité au
moyen du mécanisme de passage d'excitation 17, électro-aimants 16c,
16d, 16g, 16h, 16k et 16l opposée aux dents magnétiques 14b avec un
petit écart entre eux simplement servir un matériau magnétique disposé dans le
champ magnétique de l'aimant permanent 13 (voir la partie ombrée en Fig.4A),
afin d'absorber les dents magnétiques 14b et le rotor 12 reste
stationnaire.
Lorsque les
électro-aimants 16a, 16e et 16i positionné adjacent à la partie de la
frontière 14c1, 14c3 et 14c5 formé entre le respectifs encoches 14a et
les dents magnétiques 14b sont magnétisés ou excités simultanément au
moyen du mécanisme de basculement d'excitation, comme illustré à la Fig.4b,
le champ magnétique de l'aimant permanent 13 et les champs magnétiques
des électro-aimants 16a, 16e et 16i interagissent entre eux, pour qu'un
flux magnétique 14d en passant à travers le corps magnétique 14 instantanément
converge vers les électro-aimants 16a, 16e et 16i. De cette façon, le rotor 12 est
obtenue avec un couple de rotation dans le sens dans lequel le flux magnétique 14d
sera élargi, c'est-à-dire le sens antihoraire vu dans Fig.4B.
Fig.4C par
Fig.4G illustrent le changement de la largeur du flux magnétique 14d conformément
à la rotation du rotor 12.
Lorsque la largeur du flux magnétique devient maximisée, c'est-à-dire,
quand seulement les dents magnétiques 14b sont opposés aux électro-aimants
16a, 16e et 16i, tandis que les encoches 14a sont déplacés
complètement à l'abri d'électro-aimants 16a, 16e et 16i, la largeur du
flux magnétique 14d est maximisée.
Ainsi, une absorption
force intérimaire entre l'aimant permanent 13 et électro-aimants 16a,
16e et 16i est maximisée. En
revanche, le couple de rotation agissant sur le rotor 12 devient nulle.
Avant que le couple de rotation agissant sur
le rotor 12 devient nulle, c'est-à-dire, comme la limite de la portion 14c1,
14c3 et 14c5 approcher une autre électro-aimants 16b, 16f et 16j
positionné devant (en ce qui concerne le sens de rotation), respectivement, les
électro-aimants 16a, 16e et 16i sont démagnétise et électro-aimants 16b,
16f et 16j sont excités ou magnétisés par le mécanisme de passage de
l'excitation 17. Ainsi, le flux
magnétique 14d converge vers les électro-aimants 16b, 16f et 16j,
comme sur la Fig.4H, afin qu'un couple de rotation agit sur le rotor,
comme décrivent ci-dessus.
Ensuite, les électro-aimants 16c, 16g et
16k sont excités. Lorsque la limite
de la portion 14c1, 14c3 et 14c5 approcher une autre électro-aimants 16j,
16h et 16l positionné à venir en ce qui concerne le sens de rotation, en
réponse à la rotation du rotor 12, électro-aimants 16c, 16g et 16k sont
hors magnétisé et électro-aimants 16j, 16h et 16l sont mis sous tension
ou excités.
Comme expliquée ci-dessus, séquentielle d'excitation ou énergisant
d'électro-aimants 16a à 16l provoque l'interaction entre le flux
magnétique de l'aimant permanent 13 et électro-aimants 16a à 16l,
dans laquelle un couple de rotation est appliqué au rotor 12.
Lorsque cela se
produit, un couple de rotation est généré entre l'un des pôles magnétique de
l'aimant permanent 13 (par exemple, N-pôle) et les pôles magnétiques
(par exemple, S-poles) des électro-aimants 16a à 16l positionné à leurs
extrémités respectives axiales. Un
couple de rotation est également généré entre autre pôle magnétique (par
exemple, S-pôle) de l'aimant permanent 13 et l'autre pôle magnétique
(par exemple, N-pôle) de chacun des électro-aimants 16a à 16l placé à
l'autre extrémité axiale.
Il est à noter que, à
un seul pôle magnétique, par exemple N-pôle, de l'aimant permanent 13,
certaines des électro-aimants 16a à 16l sont magnétisées qu'aux S-pole,
empêchant ainsi la formation d'un circuit magnétique, en raison du passage du
flux magnétique d'électro-aimants excités par l'entremise des électro-aimants
adjacentes, qui tend à instaurer N-pôles magnétique similaires à l'aimant
permanent 13. On notera aussi
que, à l'autre pôle magnétique, par exemple S-pôle, de l'aimant permanent 13,
certaines des électro-aimants sont magnétisées qu'aux pôles N, empêchant ainsi
la formation d'un circuit magnétique, en raison du passage du flux magnétique
d'électro-aimants excités par des électro-aimants adjacentes, qui tend à amener
S-pôles magnétique similaires à l'aimant permanent 13. Le flux magnétique de l'aimant permanent à 13
traverse les corps magnétiques 14 afin d'être convergé vers les
électro-aimants excités (voir le flux magnétique 14d illustré à la Fig.4,
par l'intermédiaire de Fig.4H), ainsi formant des zones mortes, qu'aucun
flux magnétique ne traverse, dans les corps magnétiques 14 à une
position en face des électro-aimants non excités. En conséquence, aucune force n'est généré qui
aurait tendance à empêcher la rotation du rotor 12.
Compte tenu de
l'énergie électrique appliquée aux électro-aimants 16a à 16l, presque
toute l'énergie électrique appliquée est utilisé pour contribuer à la rotation
du rotor 12. D'autre part et
compte tenu de l'énergie magnétique de l'aimant permanent 18, toute
l'énergie magnétique contribue à la rotation du rotor 12.
Il convient également
de noter que, depuis les encoches 14a et les dents magnétiques 14b sont
disposées alternativement dans la périphérie extérieure des matériaux
magnétiques 14 dans une configuration en angle aigu dans la Fig.4A à
Fig.4H et les électro-aimants sont éliminés à un poste correspondant chacun
à la limite des portions entre les encoches et les dents magnétiques, il est
possible que la ligne de la force magnétique, généré dans chaque interstice
entre les portions de la frontière et les électro-aimants lorsque les
électro-aimants sont heureux, d'être incliné dans une large mesure, afin qu'un
degré suffisant de couple de rotation peut être obtenu sur l'excitation
initiale d'électro-aimants.
Le résultat obtenu au
cours d'une réelle exécution de test du moteur selon le premier mode de
réalisation est illustré à la Fig.1 à la Fig.3.
Acier pur a été utilisé
comme un matériau magnétique. Le
matériau magnétique était de 30 mm d'épaisseur et formé pour avoir des dents
magnétiques de 218 mm de diamètre et encoches de 158 mm de diamètre. Un aimant
en ferrite a été utilisé comme un aimant permanent. La force magnétique de l'aimant a été de 1
000 gauss. Puissance électrique de 19,55
watts a été appliqué à électro-aimants à 17 volts et ampères 1,15. Les conditions ci-dessus produit une vitesse
de rotation de 100 tr/min, avec un couple de 60.52 Kg-cm et un débit de 62,16
watts.
Autres modes de
réalisation seront expliqués ci-après en ce qui concerne la Fig.6 par Fig.9.
L'incarnation modifiée, illustrée à la Fig.6 est semblable au moteur
présenté comme le premier mode de réalisation, tel qu'illustré dans la Fig.1
à la Fig.3, à l'exception que chaque électro-aimant 160, utilisé
dans le cadre du stator, se compose d'un noyau de fer 161 ayant une
paire de jambes 162 qui s'étendent vers la périphérie extérieure des
corps magnétiques (périphérie extérieure des dents magnétiques 14b), chacune
des jambes étant enroulés avec bobines 163. Les autres composantes sont fondamentalement
identiques à celles du moteur indiqué sur la Fig.1 à Fig.3. De la Fig.6, les composants
semblables à ceux de la Fig.1 par Fig.6 sont dénotés comme par les chiffres
de référence. Il est à noter que chaque
bobine 163 est approvisionné en électricité afin qu'une jambe 162 (côté
gauche de la Fig.6) de chacun des noyaux de fer 161 est
magnétisée pour être S-pôle magnétique en face du pôle magnétique (N-pôle) du
corps magnétique confrontation 14, tandis que la jambe 162 disposée
à l'autre extrémité de chacun des noyaux de fer est magnétisée pour être N-pôle
qui est magnétiquement opposé le pôle magnétique (S-pole), des confronter corps
magnetique 14.
Selon cette mis à jour
le mode de réalisation, il est possible de réduire considérablement les fuites
de flux magnétique créé par les électro-aimants 160 lacunes chaque
défini entre les surfaces des pôles magnétiques des électro-aimants 160 et
la périphérie extérieure des dents magnétiques 14b des corps magnétiques
14.
Une autre incarnation
illustrée à la Fig.7 est semblable au moteur illustré à la Fig.1 par
Fig.8, à l'exception que : un corps magnétique supplémentaire 14 est
monté sur l'axe de rotation de sortie 11 à son milieu axial ; deux
aimants permanents 130 sont librement montés sur l'arbre de sortie 11
de la manière illustrée à la Fig.6 ; et chaque noyau de fer 165 est
munie de trois jambes 166 positionnés à l'extrémité opposée axiale et
milieu de celle-ci et s'étendant vers la périphérie extérieure respectif des
organes magnétiques, avec les jambes 166 positionné à axial extrémités
opposées des noyaux de fer respectifs 165 étant enroulé avec une bobine
de 167, qui forment les électro-aimants 164. Les autres composantes sont sensiblement les
mêmes que ceux du moteur indiqué sur la Fig.1 à Fig.3. Ici, il convient de noter que l'axe de
rotation de sortie 11 peut-être être formé de matériaux magnétiques ou
matériaux non magnétiques.
Comme sur la Fig.7,
chacune des bobines 167 est approvisionné en électricité afin que les
jambes 166 placés aux extrémités opposées axial de chacun des noyaux de
fer 164 est magnétisé pour être S-pôle qui est magnétiquement opposé le
pôle magnétique (N-pôle) du corps magnétique confrontation 14. Par la présente, la jambe 166 positionné
au milieu du noyau de fer 165 est aimantée pour être N-pôle qui est
magnétiquement opposé le pôle magnétique (S-pôle) du corps magnétique
confrontation 14.
Dans cette réalisation,
il est également possible, comme l'incarnation de mis à jour l'illustré dans la
Fig.6, de réduire considérablement les fuites de flux magnétique générée
par les électro-aimants 164. En
outre, il est également possible d'obtenir un couple de rotation entre la jambe
de 166 positionné au milieu du noyau métallique et le corps magnétique 14
positionné au milieu axial de l'arbre de rotation sortie 11. En conséquence, un couple de rotation plus
élevé peut être obtenu avec la même quantité de consommation électrique, en
comparaison avec l'incarnation, illustrée à la Fig.6.
Une autre application,
représentée dans la Fig.8 est semblable au moteur illustré à la Fig.1
que Fig.3, sauf qu'un aimant permanent magnétisé dans le sens radial,
plutôt que dans le sens axial est employée. L'aimant permanent 131 d'une
configuration annulaire a, par exemple, N-pôle dans la périphérie extérieure et
S-pôle dans la périphérie interne.
L'aimant permanent 131 est reçue dans une cavité 14e autant
dans le corps magnétique respectif 14 à la partie intermédiaire comme
disposés aux extrémités opposées axial de la sortie de rotation de l'arbre 11. Les autres composantes sont identiques à
celles du moteur illustré à la Fig.1 cependant Fig.3. Les composants identiques à celles du moteur
illustré à la Fig.1 que Fig.3 sont désignés par les mêmes
chiffres de référence. Il est à noter que cette incarnation peut également
employer les électro-aimants 160 illustré à la Fig.6.
Dans cette réalisation,
l'axe de rotation de sortie 11 peut être formé à partir des matériaux
magnétiques, plutôt que des matériaux non magnétiques.
Autre application illustrée à la Fig.9 est semblable au moteur illustré
à la Fig.1 cependant Fig.3, à trois exceptions près. La première exception est celui d'un aimant
permanent magnétisé dans le sens radial, plutôt que dans le sens axial est
employée. L'aimant permanent 131 ayant
une configuration annulaire a, par exemple, N-pôle dans la périphérie
extérieure et S-pôle dans la périphérie interne. L'aimant permanent 131 est reçue dans une
cavité 14e autant dans le corps magnétique respectif 14 à la
partie intermédiaire tant qu'il est disposé aux extrémités opposées de la
sortie rotation axiale de l'arbre 11.
La seconde exception est qu'un corps magnétique supplémentaire 14 est
disposé au milieu axial de l'arbre de rotation sortie 11. Enfin, la troisième exception est que le
noyau de fer 165 est munie de trois jambes 166 disposé à axial en
face des extrémités et au milieu, respectivement et s'étendant vers la
périphérie extérieure du corps magnétique 14, avec les pieds placés aux
extrémités opposées axiale étant enroulé avec bobines respectifs afin de former
un électro-aimant 164. Les autres
composantes sont identiques à celles du moteur illustré à la Fig.1
cependant Fig.3. Les composants
identiques à celles du moteur illustré à la Fig.1 que Fig.3 sont
désignés par les mêmes chiffres de référence.
Comme illustré à la Fig.9,
chaque bobine est approvisionné en électricité afin que les jambes 166 disposés
aux extrémités opposées d'axiales du noyau fer 165 sont magnétisés pour
être S-pôle qui est magnétiquement opposé le pôle magnétique (N-pôle) du corps
magnétique confrontation 14. Par
la présente, la jambe 166 disposée au milieu du noyau de fer 165 est
aimantée pour être N-pôle qui est magnétiquement opposé le pôle magnétique
(S-pôle) du corps magnétique confrontation 14.
Selon le mode de
réalisation décrit ci-dessus, l'axe de rotation de sortie 11 peut être
formé à partir des matériaux magnétiques au lieu des matériaux non
magnétiques. Avec ce mode de
réalisation, il est possible d'obtenir le même effet que celle obtenue avec
l'incarnation, illustrée à la Fig.7.
D'autres configurations
alternatives figurent à Fig.10A du Fig.10C sont similaires au
moteur montré cependant Fig.1 à Fig.3, à l'exception que : comme les
incarnations illustrées à la Fig.8 et Fig.9, un à un aimant permanent
annulaire 131 est employé qui est reçu dans une cavité 140e fournies
dans la partie centrale 140 du corps magnétique 140 ; le corps
magnétique 140 est fourni avec encoches 140 a dans la partie
périphérique externe, alors que l'écart G entre le corps magnétique 140
et l'électro-aimant devient progressivement plus large dans le sens de
rotation du rotor ; et les électro-aimants face au déficit de G avec une
largeur intermédiaire que positionnée entre électro-aimants face au déficit de G
avec une largeur plus étroite et les électro-aimants face au déficit de G
avec un plus larges sont excités ou magnétisé de manière séquentielle. Les autres composantes sont identiques à celles
du moteur illustré à la Fig.1 cependant Fig.3. En Fig.10A à Fig.10C, les composants
identiques à ceux de la Fig.1, bien que Fig.3 sont dénotés par le
même référencent chiffres. À cet égard,
il convient de noter que la référence 140d chiffre indique flux
magnétique traversant le corps magnétique 140, afin d'illustrer la
condition convergente de ce flux magnétique sur l'excitation des
électro-aimants.
Dans la réalisation de
just décrit ci-dessus, il est possible de faire tourner le rotor dans le sens
anti-horaire vu dans Fig.10A, par exemple, en excitant les
électro-aimants 16a, 16d, 16g et 16j, comme indiqué dans Fig.10A,
puis, les électro-aimants 16c, 16f, 16i et 16l, comme indiqué dans Fig.10B
et puis les électro-aimants 16b, 16e, 16h et 16k. Selon ce mode de réalisation, il est possible
d'obtenir une force de rotation stable, ainsi qu'un couple de rotation plus
élevé, même si le nombre de rotations est réduite par rapport à l'incarnation
ci-dessus.
Comme indiqué dans Fig.10A, quatre
encoches 140a sont fournis.
Toutefois, il est à noter que deux ou trois crans peuvent être fournis. Il est
également possible de fixer le matériau magnétique 140 à l'arbre de
sortie rotation 11 de manière excentrique dans son intégralité, sans
fournir d'encoches 140a.
Fig.11A travers
Fig.11H sont illustratifs diagrammes montrant le fonctionnement de la seconde
réalisation de l'invention lorsque mis au point dans un type de moteur
linéaire.
Selon ce mode de réalisation, un corps mobile 21 est adapté pour être
déplacé le long d'une piste linéaire 20 d'un type de convoyeur à
rouleaux. La piste comprend un châssis
sur lequel une pluralité de rouleaux sont placés en parallèle par rapport à un
autre. Un aimant permanent 22 est
monté sur le mobile de la carrosserie 21. Un corps magnétique 23 d'une
configuration de type plaque est fixé à l'aimant permanent 22 dans
l'extrados, telles qu'ils constituent un élément mobile. Il est à noter que le flux magnétique de
l'aimant permanent 22 passe par le corps magnétique 23. Une pluralité d'électro-aimants, 25a, 25b,
25c, 25d et ainsi de suite sont disposées au-dessus de l'élément
mobile 24 le long du parallèle de la piste linéaire positionné les uns
aux autres. Ces électro-aimants
constituent un stator 25.
Circuits magnétiques des électro-aimants 25a, 25b, 25c, 25d et
ainsi de suite, sont indépendants entre eux, afin que les électro-aimants
sont magnétisées de manière séquentielle au moyen du mécanisme de basculement
d'excitation (non illustré), afin d'avoir une polarité magnétique opposée le
pôle magnétique de l'aimant permanent 22. Puissance de sortie arbres 21 a sont
attachées à une surface latérale du corps mobile 21.
Fonctionnement de
l'incarnation deuxième ci-dessus sera expliqué ci-après.
Comme sur la Fig.11 a,
et lorsqu'aucune électricité n'est fournie pour les électro-aimants,
électro-aimants 25a et 25b placé juste au-dessus de l'élément mobile 24
sont soumis au champ magnétique de l'aimant permanent 22 (voir la
partie ombrée en Fig.11a). Ainsi,
ces électro-aimants magnétiquement absorbent le corps magnétique 23,
afin que l'élément mobile 24 reste à être arrêté.
Comme indiqué dans Fig.11B,
et lorsque l'électro-aimant 25c, positionné en avance par rapport à la
direction dans laquelle l'élément mobile 24 se déplace, est excité, le
champ magnétique de l'aimant permanent 22 et le champ magnétique de
l'électro-aimant 25c interagir entre eux, afin que le flux magnétique 23a
traversant le corps magnétique 23 converge instantanément vers
l'électro-aimant de 25°C. Par la présente,
l'élément mobile 24 est magnétiquement absorbée à l'électro-aimant 25c,
afin qu'il se déplace le long de la piste linéaire 20 sous la force de
propulsion agissant dans le sens où la largeur du flux magnétique 23a devient
plus large, c'est-à-dire dans le sens d'une marque de la flèche indiqué dans Fig.11B.
Fig.11C par
Fig.11E illustrent une modification de la largeur du flux magnétique 23a en
réponse au mouvement de l'élément mobile 24. Au point où la largeur du flux magnétique 23a
devient maximisée, c'est-à-dire, lorsque l'extrémité avant du matériau
magnétique 23 de l'élément mobile 24 est positionnée juste avant
de passer par l'électro-aimant de 25° C, la largeur du flux 23 devient
maximisée. À cette époque, absorption
magnétique agissant entre l'aimant permanent 22 et l'électro-aimant 25c
devient maximisée, mais la force de propulsion agissant sur l'élément
mobile devient nulle.
Devant la force de
propulsion agissant sur l'élément mobile 24 devient complètement nulle,
c'est-à-dire lorsque l'extrémité avant du corps magnétique 23 de
l'élément mobile 24 s'apprête à passer de l'électro-aimant 25d,
le mécanisme de passage d'excitation est actionné afin d'arrêter l'excitation
de l'électro-aimant 25c et afin d'initier l'excitation de
l'électro-aimant 25d. Ainsi, le
flux magnétique 23a converge vers l'électro-aimant 25d, comme sur
la Fig.11F, afin qu'une force propulsive agit sur l'élément mobile 24,
comme dans l'étape précédente.
Par la suite et en
réponse à d'autres mouvements de l'élément mobile 24, la largeur du flux
magnétique 23a est réduite, comme indiqué dans Fig.11G et Fig.11H,
et donc une opération similaire sera répétée.
L'excitation
séquentielle des électro-aimants, comme expliqué ci-dessus, provoque
l'interaction entre les champs magnétiques des aimants permanents 22 et
les électro-aimants, auquel cas une propulsion force est appliquée à l'élément
mobile 24.
Il est à noter que, lorsque la polarité magnétique de l'aimant permanent 22 confrontant
les électro-aimants est supposée pour être N-pôle, l'électro-aimant 25c est
magnétisé uniquement pour être S-pôle, afin d'éviter la formation d'un circuit
magnétique en vertu du passage du flux magnétique de l'électro-aimant 25c à
travers à électro-aimants adjacentes 25b et 25d, laquelle formation, si elle
se produit, a tendance à provoquer la polarité des électro-aimants pour être
N-pôle identique vers le pôle magnétique de l'aimant permanent 22. En conséquence et d'une manière similaire à
celle dans la première réalisation, aucune force n'est généré qui a tendance à
gêner la circulation de l'élément mobile 24.
Dans la présente invention, une pluralité d'électro-aimants agissant
comme un stator sont disposées de manière que leurs circuits magnétiques
respectives deviennent indépendants de l'autre.
Les électro-aimants sont également organisées pour qu'ils sont
uniquement magnétisés ou ravis d'avoir une polarité magnétique opposée le pôle
magnétique de l'aimant permanent confrontation.
Ainsi, chaque électro-aimant est empêché de devenir magnétisé à la même
polarité que celle de l'aimant permanent, qui peut se produire lorsque le flux
magnétique d'un électro-aimant particulier traverse à électro-aimants
adjacents. En conséquence, aucune force
ne va être exercée qui tend à entraver le déplacement prévu d'un rotor ou d'un
élément mobile. Ainsi, l'énergie
électrique appliquée aux électro-aimants peut être utilisée efficacement,
tandis que, dans le même temps, l'énergie magnétique contenue dans l'aimant
permanent peut-aussi être utilisée efficacement.
Les bobines constituant les électro-aimants sont
constamment alimentés en courant électrique avec la même polarité, sans
changement, ainsi que des serpentins de chauffage peuvent être évités. En outre, il est possible de pallier les
problèmes de vibrations et de bruit qui pourrait survenir en raison d'une force
de répulsion générée lorsque la polarité du courant électrique fourni à des
bobines est changée.
JOSEPH NEWMAN:
SYSTÈME DE GÉNÉRATION D'ÉNERGIE
Brevet WO8300963 17 mars1983 Inventeur: Joseph W. Newman
SYSTÈME DE GÉNÉRATION D'ÉNERGIE AYANT LA PRODUCTION D'ÉNERGIE PLUS ÉLEVÉE
QUE L'ENTRÉE
Ce brevet couvre un
appareil qui est censé avoir une puissance plue que la puissance d'entrée
nécessaire pour l'exécuter.
RÉSUMÉ
Un système de
production travail évident motion, ou énergie électromagnétique (champs de
force) ou électrique actuel utilisant l'énergie électromagnétique qui constitue
une question et se traduit par une plus grande dépense d'énergie, que l'entrée
initiale des moyens énergétiques conventionnelles et enseignements. Un premier mode de réalisation exemplaire (Fig.1)
du générateur utilise un fluide confiné (117) entourant une série
d'aimants alignés (120) ; tandis qu'une deuxième incarnation exemplaire
(Fig.3) utilise un matériau spécial (201) maintenu immobile entre
deux aimants statiques (202, 203), le matériel spécial ayant ses atomes
alignés, mais maintenir le champ magnétique résultant au moins
substantiellement dans sa surface de limite ; alors que les troisième et
quatrième exemplaires des incarnations (Fig. 5 et Fig. 6) utilisent une
bobine relativement lourde (205), composée de fil de diamètre assez
important de relativement grande longueur et nombre de boucles et longueur et un
énergisant relativement peu courant pour piloter un rotatif à un aimant
permanent (200).
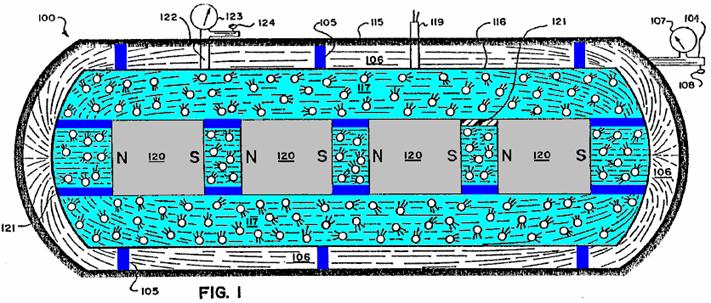
DESCRIPTION
CONTEXTE DE L'INVENTION
1. Domaine de
l'Invention
La présente invention
porte généralement sur des systèmes (y compris les méthodes) permettant de
générer une énergie utilisable comme par exemple de l'énergie électrique
provenant des champs électromagnétiques, énergie électrique ou des champs
électromagnétiques de la matière et plus particulièrement sur des systèmes (y
compris les méthodes) pour la production de courant électrique pour utilisation
comme alimentation électrique et les champs magnétiques de la force qui
provoque le mouvement (travail évident) ou des flux de courant électrique ou
pour augmenter l'énergie potentiel électromagnétique disponible pour
utilisation ou énergie mécanique disponible pour utilisation.
2. État de la technique
Il y a eu de nombreux
dispositifs proposés au cours des années de production d'énergie électrique,
avec les frottements mécaniques, thermo-électricité, photoélectricité,
piézoélectricité, électrochimie et induction électromagnétique étant les chef
formes d'énergie primaire capable de produire de l'électricité. Parmi ceux-ci, la source significative
d'énergie électrique commercial a été l'action mécanique des générateurs
électriques, et pour l'énergie électrique mobile l'action chimique des piles a
été importante. Motion utilisable a
entraîné des interactions entre l'apport d'énergie électrique et magnétique
et/ou des champs électromagnétiques de force (moteurs électriques) et la
chaleur ou la lumière à la suite de l'entrée du courant électrique par le biais
de systèmes mécaniques conventionnels, chauffages, ampoules, etc.
Tous l'état de la
technique les systèmes sont conçus en conséquence à des lois mathématiques
rigides a enseigné aussi bien en physique et génie électrique qui coïncident
avec l'hypothèse rigidement acceptée par les communautés industrielles et
scientifiques concernant la deuxième loi de la thermodynamique (1850). De l'hypothèse généralement acceptée qui
précèdent, il a aussi été généralement acceptée et rigidement enseigné en
physique et électrique génie que le courant électrique qui circule dans un
circuit fermé d'une batterie, générateur électrique, etc. est utilisé dans le
dispositif mécanique utilisé par ce flux de courant électrique, et que tous ces
systèmes produisant courants électriques donneraient seulement travaillent au
plus égale à le œuvre au départ mis dans le système, ou conformément aux lois généralement
admises, indiquant qu'un système particulier de générateur électrique était
uniquement capable d'une production donnée de l'énergie et pas plus.
Ces croyances ont
jusqu'à cette date demeure rigide dans les communautés scientifiques et
industrielles en dépit de la preuve de l'équation d'Oliver Heaviside E = mC2
réacteurs nucléaires question de convertir en énergie électromagnétique
utilisable sous forme de chaleur, qui convertit l'eau en vapeur pour tourner
les turbines classiques pour la production électrique actuelle par des moyens
conventionnels de production électriques.
Ce système est extrêmement inefficace en utilisant moins de 1 % de
l'énergie de l'atome et produisant un déluge de matières contaminées qui a
causé un grave problème quant à l'élimination en toute sécurité.
En outre, les
générateurs électriques base est utilisation partout dans le monde
d'aujourd'hui utilisent le principe de causer le mouvement relatif entre un
conducteur électrique (par exemple un rotor) et un champ magnétique produit par
un aimant ou un électro-aimant (par exemple un stator), tout en utilisant
l'hypothèse généralement acceptée que plus le parent la vitesse ou le mouvement
entre les deux sont concernés et plus normal ou perpendiculaire le mouvement
relatif des matières conductrices pour les lignes de force de la champ
électromagnétique, la plus grande sera l'efficacité du générateur électrique
d'antériorité. En outre, tous les
systèmes de l'état de la technique sont basées sur l'hypothèse généralement
acceptée que plus la conductivité électrique du matériau en cours ont traversé
le terrain, le plus efficace sera la production d'électricité.
Depuis les hypothèses
généralement admises qui précèdent, il également est généralement admis qu'il
devrait toujours y avoir mouvement entre, par exemple, les éléments du rotor et
du stator et que seulement entremêler des conducteurs électriques, ce qui est
des matériaux ayant une conductivité électrique élevée, serviront efficacement
dans un système de production d'électricité.
Toutefois, dans l'un
des systèmes (Fig.3) de la présente invention, génération électrique
peut se produire avec des éléments relativement statiques et avec des matériaux
qui sont considérés comme généralement pas d'une conductivité électrique élevée,
même si, bien sûr, la présente invention de même pouvez utiliser relativement
se déplaçant des éléments ainsi que des matériaux de haute conductivité
électrique généralement reconnue, si oui désiré, comme cela se produit dans les
systèmes de la présente invention, illustré dans la Fig.5 et Fig.6.
L'état de la technique
n'a pas à comprendre certains aspects physiques de la matière et la composition
des champs électromagnétiques, dont l'échec a été corrigée par la présente
invention.
BRÈVE
DESCRIPTION DES DESSINS
Pour mieux comprendre
la nature et les objets de la présente invention, il faut se reporter à ce qui
suit description, en conjonction avec les dessins qui l'accompagne, dans lequel
comme pièces sont donnés détaillée comme chiffres de référence et où :

Fig.1 représente une vue schématique, côtée sous forme généralisée,
représentation d'un premier mode de réalisation d'un générateur électrique basé
sur les principes et lignes directrices de la présente invention.
Fig.2 est une vue rapprochée dans la forme
générale d'un élément de pick-up de charge électrique qui peut être utilisé
dans le générateur, illustré à la Fig.1.
Fig.3 est une vue schématique sous forme généralisée, représentation d'un
deuxième mode de réalisation d'un générateur électrique basé sur les principes
et lignes directrices de la présente invention.
Fig.4 est une vue schématique sous forme
généralisée, représentation des particules négatives et positives présentant
des mesures gyroscopiques qui émanent d'un aimant pour former un champ
électromagnétique.
Fig.5 et Fig.6 sont des points de vue
schématiques sous forme généralisée, représentation des troisième et quatrième
modes de réalisation d'un générateur électrique combiné et un moteur utilisant
une bobine statique, relativement importante, alimentée par un courant
relativement faible un aimant rotatif, dans lequel dans l'incarnation de la Fig.5
l'aimant rotatif est positionné le long du côté de la bobine et dans
l'incarnation de la Fig.6 l'aimant rotatif est placé dans le cœur ouvert
de la bobine de conduite.
DESCRIPTION
DÉTAILLÉE DES MODES DE RÉALISATION PRÉFÉRÉS
Lignes
directrices et les principes de base
Conformément aux
principes de la présente invention et généralement illustrées à la Fig.3,
un champ électromagnétique 10 comprend les flux de particules 20, 30 de
l'énergie électrique de chacun des pôles 21, 31, d'un aimant (ou
électro-aimant) ou quanta 40 à l'autre pôle, suivant les " lignes
de force " 11 du champ électromagnétique. Ces particules de 20, 30, censés
voyager à la vitesse de la lumière, sont toujours en sortant une extrémité 21,
31, respectivement, de l'aimant 40 et entrer dans l'autre pôle 31,
21, respectivement, fluides provenant d'une source d'énergie relativement
élevée à une source d'énergie faible.
Ces particules de 20,
30 sont, il est cru, les charges négatives et positives et ont un spin
produisant un mouvement gyroscopique et suivent les lois mécaniques d'action
gyroscopique.
La masse de chacune des
particules 20, 30 équivaut à l'énergie de la particule divisée par la
vitesse de la lumière au carré. La
vitesse périphérique de la vrille gyroscopique des particules est censée être
la vitesse de la lumière.
À des fins
d'illustration seulement et comme une question de nomenclature, la particule de
charge positive 20 va dans un sens (N à S) avec une rotation vers la
droite et la charge négative particule 30 va dans le sens inverse avec
une rotation en sens anti-horaire. Bien entendu, si une particule comme 20
ou 30 inversée autour-cent-et-quatre-vingts degrés, il devient l'accusation
ou du type de particule opposé.
Le champ électromagnétique 10 est
donc la circulation ordonnée des charges positives et négatives 20, 30,
se déplaçant à la vitesse de la lumière venant du Nord et le pôle Sud 21, 31,
au sud et le pôle Nord 31, 21, respectivement et suivez les sentiers de
ce qu'on appelle dans l'art comme les " lignes de force " 11 du
champ électromagnétique 10. On
sait depuis les lois de gyroscopes, une particule gyroscopique ou le corps se
déplace perpendiculairement à la direction d'une force appliquée. Par conséquent, lorsqu'une force est
appliquée à des particules d'énergie électrique 20, 30, ils se
déplaceront à angle droit par rapport à cette force.
Il convient également de noter de lois
gyroscopiques connues que les particules d'énergie électrique 20, 30,
quand ils se déplacent avec leur axe gyroscopique directement dans un objet,
tendent à frapper cet objet rectiligne, mais, si cet objet frappe les particules
selon un angle à l'axe autrement qu'à zéro ou à cent quatre-vingts degrés, les
particules sont déplacés sous l'angle de la ligne droite. En outre, il est à noter qu'un champ
magnétique causé par un courant traversant un fil vient de particules négatives
et positives, comme 20, 30, avec un flux net de telles particules allant dans
le même sens mais avec spin opposé.
Dans le système et la
méthode de la présente invention, les principes qui précèdent servent de lignes
directrices dans la présente invention.
On peut citer davantage vers pages DD23 par DD27 du Document
d'information et à la page 8, ligne 26, page 11, ligne 23 de la demande
antérieure, le numéro de série 25 907 et ses Figures 7-10.
Les informations qui
précède, nombreux différents dispositifs, structures et méthodes sont possibles
incarner les principes et lignes directrices du système de la présente
invention, qui en général utiliseront une matière ou substance ou une structure
de placer une force à l'angle approprié aux particules gyroscopiques de 20,
30, dans lequel les particules de 20, 30 suivre un chemin d'accès ou
chemins d'accès qui ne s'annulent pas mutuellement à, produisant ainsi un
courant électrique aux sorties appropriés pour une utilisation ultérieure ou
pour augmenter l'énergie électrique potentiel disponible pour utilisation
finale.
Premier mode de
réalisation (Fig.1)
Un mode de réalisation
possible, exemplaire en utilisant les principes du système de la présente
invention est schématiquement représenté dans l'illustration généralisée de Fig.1.

Tel qu'illustré à la Fig.1, il est
fourni un générateur de courant électrique 100 comprenant un gardien
externe 115 du logement et une pression intérieure, contenant, fermé
logement 116 prises en charge qui y est en isolant soutient 105. Un vide existe dans la zone 106 entre les
deux boîtiers, 115, 116, quel vide est réglementé et induite par le
biais de la conduite d'aspiration 104 avec son calibre 107 et son
régulateur de 108. Le cercle
extérieur 115 actes de logement comme un gardien pour des champs
magnétiques de la force et peut être fait par exemple de fer doux, tandis que
le vide dans la zone 106 empêche la fuite ou le rejet des charges
électriques statiques qui pourrait s'accumuler sur l'extérieur de l'intérieur,
logement 116.
Un gaz ou un mélange de
gaz-liquide 117 qui peut également inclure des particules solides tels
que des dépôts par exemple plomb ou en laiton, est compris dans le cercle
intérieur logement 116 entourant une série d'aimants alignés 120 portés
par des isolants accolades ou prend en charge les 121 et produisant un
niveau élevé, combiné de champ électromagnétique. Les aimants 120, qui peuvent par
exemple être aimants cryogéniques, ont leur " Nord " et " Sud
" les poteaux orienté (comme en témoigne la " Ns " et
" Ss ") de sorte que leurs champs magnétiques se renforcent
mutuellement.
Le niveau du gaz ou
mélange de gaz-liquide 117 dans le logement 116 est réglable
grâce à la ligne 122 avec sa jauge 123 et la vanne de régulation 124. Courant électrique fils 119 sont
fournis et s'étendent vers le bas pour électriquement se connectent avec un
système de ramassage de fil 118 (montré en gros plan à la Fig.2),
qui peut être par exemple sous la forme de très petits fils formant un réseau
très rapprochée ou un tissu ou d'un corps métallique conductrice poreux ou
feuille de sortie, situé à et étendu à l'ensemble du fluide 117 dans le
logement 116.
Il est à noter qu'un dé
de gaz contienne un fantastiquement grand nombre d'organes extrêmement
minuscules qui sont en mouvement continu, aléatoire, se déplaçant à des
vitesses extrêmement élevées. Par
conséquent, le fluide 117 continuellement applique une force le
déplacement de particules gyroscopiques (analogues aux particules 20, 30 de
Fig.3) à la vitesse de la lumière dans le haut du champ
électromagnétique (produit par les aimants 120) comme ils
continuellement entrent en collision avec l'autre, qui se traduit par le fluide
117 devient une charge électrique.
Le liquide chargé 117 s'acquitte sa charge électrique au réseau
fil pick-up 118 positionné dans le liquide, et le courant électrique
ainsi produite et généré est demontée pour utilisation via les câbles de sortie
électrique 119.
Comme alternative à
ayant contenu des aimants 120 en interne, le champ électromagnétique
nécessaire dans le fluide 117 pourrait être produit par une source
située à l'extérieur de l'enceinte du fluide 117 tant qu'un champ
significatif a été produit dans le liquide de 117.
Deuxième
incarnation (Fig.3)
Une application plus
exemplaire, généralisée, utilisant les principes du système de la présente
invention est montrée sous forme schématique en Fig.3. Le générateur de courant électrique 200 de
Fig.3 comprend un membre prolongé 201 d'un matériau spécial ayant
ses atomes alignés en particulier pour produire un courant électrique lorsque
placé dans un champ électromagnétique mais qui est pas sur sa propre pièce de
n'importe quel champ magnétique substantielle à l'extérieur de ses surfaces de
limite, mais contient substantiellement le champ intérieur de lui-même. Cette méthode diffère des matériaux "
magnétiques " qui ont même alignement atome, mais qui aussi pièce ou
produisent un champ magnétique considérable dans la région qui l'entoure.
Le générateur 200 plus
comprend par exemple deux aimants 202, 203, avec leurs pôles Nord et sud
face à face, avec le membre 201 placé entre eux et avec les trois
éléments 201-203 tenue statique à l'égard de l'autre. En raison de la nature particulière du
matériau du membre 201 et son alignement atome spéciale, il va produire
un courant continu par le biais de la ligne 204 de sortie du fait des
mesures gyroscopiques des particules du champ électromagnétique 205 produit
par les aimants face vers 202, 203, sur les atomes surtout alignés en
membre 201, quel phénomène se produit quand même et même si le membre 201
est complètement statique en ce qui concerne les aimants 212, 203.
Toutefois, il peut être souhaitable dans
certaines applications afin d'autoriser ou de produire un mouvement relatif
entre les éléments du générateur 201-203. La ligne de sortie 204 s'étend à un
approprié " charger " 206 pour utiliser le courant électrique
généré par le générateur de 200.
Une conduite de retour 207 complète le circuit sur l'élément 201.
Après des expériences à
ce jour, on croit qu'en laiton et plomb sont des matières qui peuvent avoir
leurs atomes alignés surtout pour interagir avec les particules gyroscopiques
(analogues aux particules 20, 30) s'écoulant entre les aimants, 202,
203 et contiendront considérablement dans leur périmètre de surface du
champ magnétique produit par les alignés atomes ou molécules.
Pour ce qui est de
produire le matériau approprié avec l'alignement de l'atome pour le membre 201,
il est à noter que la plupart des matériaux semblent aligner leurs atomes dans
des directions aléatoires quand formée par les méthodes conventionnelles de
production. Cependant, on constate que
certains matériaux peut être faite magnétique en mettant le matériel dans un champ
électromagnétique en refroidissant à une température d'environ un millier de
degrés centigrades. Le magnétisme est le
résultat de l'alignement atome de la matière dans une direction donnée (voir
pages DD19 par DD21 du Document d'information).
Tous les matériaux sont affectés afin d'aligner les parallèles ou dans
l'ensemble de lignes de force quand dans un champ électromagnétique
puissant. Par conséquent, si un matériau
tout en étant formé est refroidi dans un champ électromagnétique très puissant,
les atomes de la matière aura un alignement particulier. La direction d'alignement atome pourrait être
modifiée selon la question de savoir si le champ électromagnétique a été aligné
avec le matériel ou à un angle de quatre-vingt-dix degrés à la matière. Cela se traduirait par les atomes d'un matériau
ayant leur gisement de rotation électromagnétique particulière principalement
le long du même axe.
Cependant, ayant simplement l'alignement
atome n'est pas suffisant. De plus le
matériel pour l'invention devrait être telle qu'elle a très peu si n'importe
quel champ magnétique dans la zone qui l'entoure. Ainsi il convient de noter que le champ
électromagnétique extérieur qui se produit à partir de l'alignement de l'atome
de l'aimant conventionnel n'est pas dupliqué dans la matière de l'invention, parce
que l'énergie électromagnétique résultant d'alignement atome dans la matière de
l'invention sera principalement contenue dans les limites de la matière, on
croit que le plomb, fait supraconducteur par immersion dans un bain d'hélium
liquide par exemple, est un matériau spécial et pourrait par exemple servir
comme matériel pour membre 201.
Il en résulte alors
avoir un matériau qui imposerait une force à l'angle approprié sur les
particules de type gyroscopique se déplaçant dans le champ électromagnétique
afin de provoquer un EMF à produire même lorsque le matériau était toujours
assis. (Voir aussi page DD23, premier alinéa et aux paragraphes 4, A à E, de la
page DDl9 du Document d'information).
On croit que des
pressions élevées, confinées, ainsi que d'autres méthodes, peuvent produire
aussi probablement l'alignement atome comme les atomes d'un chef d'orchestre ou
du matériel réagiront à une force extérieure suffisante. (Voir le premier paragraphe de la page DD35
du Document d'information). Cette possibilité
est également indiquée par le fait que les chocs ou impacts seront démagnétiser
un aimant.
La procédure appropriée
de la production matérielle pour atteindre l'alignement atome avec confinée à
l'intérieur de champs de force provoque la libération contrôlée de l'énergie
électrique dans des champs électromagnétiques de force lorsque la matière de
l'invention est placée dans les lignes de force du champ électromagnétique.
Troisième et quatrième incarnations (Fig.5
et Fig.6)
A. les principes
1. De nombreux tests scientifiques et des expériences effectuées par
l'inventeur indiquent que le champ magnétique résultant d'un courant électrique
qui circule dans un conducteur est le résultat de l'alignement atome dans ce
chef d'orchestre à une vitesse extrêmement élevée avec une capacité d'inverser
l'alignement atome tout aussi rapidement sans l'hystérésis magnétique associé à
des matériaux conventionnels considérés " magnétiques ". Avant cette période, il a été cru et enseigné
par la communauté scientifique que le champ magnétique associé à un conducteur
électrique actuel était le résultat de courant lui-même et non du matériau
conducteur, par exemple le cuivre, qui était considéré comme " non
magnétiques ". Même
l'inventeur a été influencé et induire en erreur par ces enseignements et a
tenté d'expliquer et de justifier les enseignements antérieurs, comme on le
voit sur la page DD-27 du Document divulgation qui est une partie importante de
cette demande de brevet mécaniquement.
Toutefois, tel
qu'enseigné dans la présente invention, ce qui se passe mécaniquement est que
les particules gyroscopiques qui composent le courant électrique se déplaçant
dans un conducteur interagissent avec le maquillage électromagnétique des
atomes du conducteur, obligeant à aligner extrêmement rapidement, ce qui et en
relâchant certains de leur maquillage électromagnétique sous la forme d'un
champ magnétique exactement comme il est expliqué dans les moindres détails
pour les matériaux magnétiques classiques dans le Document d'information.
Cela est facilement
prouvée et compris en prenant par exemple, un conducteur de calibre 14 taille
un pied de long, en enroulant dans une bobine et en reliant la bobine à un
mètre et une pile de 1,5 volt. Le
courant total inscrit sur le compteur sera 1,5 ampères et la force du champ
magnétique créé du conducteur court sera extrêmement faible. Ensuite, le même type de test est exécuté à nouveau, mais avec la
longueur du conducteur est passé à, par exemple, deux mille pieds, mais
toujours dans une bobine. Le courant
total inscrit sur le compteur sera maintenant beaucoup moins, mais la force du
champ magnétique dégagée du conducteur sera désormais extrêmement volumineux !
Cela montre que le champ magnétique n'est
pas de l'écoulement du courant électrique, mais est le résultat des
interactions entre les particules gyroscopiques qui composent le courant
électrique interagissant avec les atomes du conducteur ! Cela entraîne les
particules gyroscopiques de courant ne pas pour pouvoir faire le circuit de
retour à la batterie si vite et par conséquent le montre compteur moins courant
utilisé.
Le champ magnétique est
le résultat de l'alignement de l'atome du conducteur. Les atomes plus dans un
conducteur (jusqu'à un point), plus le champ magnétique produit d'une quantité
donnée d'entrée de courant électrique. Encore une fois, cela est prouvé en
changeant le diamètre des fils conducteurs, et, avec les longueurs étant les
mêmes, le plus puissant champ magnétique résultera de la chef d'orchestre avec
le plus grand diamètre. La raison en est
qu'il ya plus mener des atomes pour interagir avec les particules gyroscopiques
du déplacement courant électrique par le conducteur, qui se traduit par un plus
grand nombre des atomes sont alignés, ainsi puis libérant certains de leur
maquillage électromagnétique, exactement comme l'ont expliqué en détail dans le
Document d'information comme étant possible pour toute matière.
Si le champ magnétique
produit était strictement basé sur la quantité de courant passant par un chef
d'orchestre, tel qu'enseigné dans l'état de la technique, puis le plus fort
champ magnétique se traduirait lorsque le courant a traversé un grand diamètre
et chef d'orchestre de courte durée, car l'écoulement du courant à travers tout
le circuit est plus grande à ce moment-là.
Cependant, les expériences prouvent que plus un conducteur est faite,
plus le débit actuel à travers tout le circuit et le moins de force du champ
magnétique entourant ce conducteur. Plus
ce même conducteur est faite (jusqu'à un point), plus le champ magnétique
entourant la masse totale de la chef d'orchestre et le moins de courant qui
fait le circuit complet de tout le système.
Raison: plusieurs atomes !
2. De nombreux
tests scientifiques et des expériences effectuées par l'inventeur indiquent
également que le champ magnétique créé lorsqu'un courant électrique se déplace
dans un conducteur n'utilise pas d'énergie mesurables lorsque vous effectuez un
travail évident ou non évidente, de force ou de puissance. C'est vrai quelle que soit la force ou est
comment immense de la puissance du moteur ou des électro-aimants.
Raison: le champ
magnétique provenant de la chef d'orchestre est le résultat de l'alignement
atome extrêmement rapide au sein de ce conducteur. Par conséquent, l'énergie du champ magnétique
est l'énergie qui compose les atomes du conducteur ! Cette énergie est littéralement équation
d'Oliver Heaviside E = mC2, et donc l'énergie est censé se déplacer
à la vitesse de la lumière.
Cette utilisation de
l'énergie ne peut pas être mesurée par les instruments de mesure
d'aujourd'hui. Cela a été expliqué en
détail dans la Document d'information et est censé être vrai de toute matière !
3. Le même est
vrai pour le courant électrique qui provient d'une batterie classique. L'énergie électromagnétique, provenant de la
batterie est l'énergie qui compose les atomes du matériau de la batterie ! Encore une fois, cette utilisation de
l'énergie n'est pas mesurable par les instruments de mesure d'aujourd'hui. Des compteurs électriques de tous types sont
simplement mécaniques qui mesurent la quantité de courant électrique qui vient
dans cet instrument. Ils ne mesurent pas
la quantité de masse qui a été convertie en énergie électromagnétique.
Présenter les
enseignements dans l'état de science que l'énergie électrique s'écoulant d'une
batterie est utilisé dans le dispositif actionné par que le flux de courant
électrique. Ce n'est pas vrai du tout !
L'énergie électromagnétique libérée de la composition de l'atome d'une batterie
a une capacité relativement infinie à faire travail évident, la force ou de
puissance.
Cela est prouvé
facilement même avec un petit moteur et une pile de 1,5 volt. Une batterie connectée au moteur pour le
faire fonctionner, avec un compteur pour prendre des lectures, le moteur est
alors physiquement arrête de tourner par physiquement tenant ou de retenue de
l'arbre. A ce moment, le moteur
n'effectue aucun travail évident, la force ou la puissance, mais le compteur
enregistrera un plus grand flux de courant. Les aimants du moteur peuvent être
retirées et la lecture sera toujours le même.
Si le courant électrique a été utilisé pour faire fonctionner le moteur,
le compteur enregistrerait plus courant lorsque le moteur était en marche.
Le courant électrique
sera exploitée non seulement pas le moteur mais, une fois qu'il circule dans le
circuit complet à la batterie, il fait aussi des travaux supplémentaires basé
sur les lois de d'électrolyse Faraday dans la batterie elle-même. Ce qui est arrivé est que l'énergie
électromagnétique libérée des atomes du matériau de la batterie une fois qu'ils
ont complété le circuit, puis prennent un " raccourci " et survolez
les gros morceaux de la masse d'un matériau de la batterie à l'autre matériau
de la batterie. L'inventeur a dit et
montré dans le Document d'information que l'effet de la gravité a été l'effet
non évidente d'énergie électromagnétique.
Une fois les matériaux de la batterie sont combinés, le désir extrême
pour les deux matériaux à fusionner est physiquement réduit. Ces matériaux tentera cette fusion toute
façon possible et, si le courant électrique, initialement publié par une
batterie n'est pas autorisé par des moyens mécaniques pour compléter le circuit
de retour au sein de lui-même, l'énergie électromagnétique puis dans les
dispositifs mécaniques perpétuellement (dans un sens relatif, théorique)
interprétera travail évident, de force ou de puissance. La raison : la force qui a initié cette
intensité de courant (maquillage électromagnétique des atomes de matière) est
constante, semblable à pression hydraulique, à l'exception notable que son
déplacement, il croit à la vitesse de la lumière et interagit avec le
maquillage électromagnétique des atomes d'autres matières, obligeant à sortir
certains de leur maquillage électromagnétique sous la forme d'un champ
magnétique. Cette puis multiples fonctionne pas la
capacité pour faire évident ou non évidente, force ou puissance, qui peut
ensuite réagir avec un autre bobine conductrice ou avec l'énergie
électromagnétique dans le champ magnétique d'un aimant conventionnel et
multiplier cet effet encore plus loin et sur et ainsi de suite pour une source
relativement illimitée d'énergie.
Il en va de même à ne
pas laisser l'EEG actuel vers un générateur conventionnel. Si un moyen mécanique est mis en place afin
que le courant électrique est " pris au piège ", sans avoir terminé
un circuit, les particules gyroscopiques du courant ont une capacité de travail
continu sans augmenter la puissance absorbée dans le système de générateur. Toutefois, si le circuit est terminé et que
le courant électrique se déplaçant dans le système ne travail absolument pas
évidente, d'alimentation ou de force, les particules gyroscopiques qui
composent le courant sur pour revenir à la génératrice augmentera alors la
nécessité d'une alimentation plus dans le système. Raison : l'effet adverse des champs
magnétiques tels que définis dans la Loi de Lentz. Cette loi est une simple observation de cet
effet, qui, jusqu'à présent, n'a jamais été pleinement comprise.
4. de nombreux
tests scientifiques et des expériences effectuées par l'inventeur indiquent
également qu'il existe une corrélation entre l'orientation de rotation
électromagnétique des atomes non conducteurs, des semi-conducteurs, des
conducteurs et les différents résultats obtenus avec un courant électrique en
essayant de se déplacer par le biais de ces matériaux, ou lors du déplacement
de ces matériaux à travers un champ magnétique tentant d'induire le courant
électrique. La propriété de résistance à
la circulation de courante électrique est en général le même facteur de type
déjà expliqué ci-dessus pour le courant électrique produisant un champ
magnétique lors d'un déplacement dans un conducteur.
Les particules
gyroscopiques dans un courant électrique mobile interagissent avec les atomes
de la matière au travers de laquelle le courant se déplace. Chaque atome peut efficacement seulement interagir avec montant maximal
exact du courant électrique du soleil, et, en cas de dépassement, il y a une
interruption du mouvement ordonné. Puis
l'angle de la libération des particules gyroscopiques les atomes sont telles
que le dégagement électromagnétique de ces atomes sont sous forme de chaleur,
exactement comme il est expliqué en détail dans le Document d'information. Cet effet est facilement observable par le fait que
la résistance diminue par rapport à une augmentation de la section transversale
de la matière. Raison : simplement, plus d'atomes dans ce compte tenu de zone
et, pour une entrée fixe électrique actuel, qu'il y sont des atomes plus de
recevoir et d'interagir efficacement avec les gyroparticles qui composent
l'électrique actuel.
Encore une fois le même
est vrai pour résistances conçus pour délibérément production de chaleur. Ces résistances ne sont pas les matériaux qui
sont considérés comme de bons conducteurs de courant électrique. Il est dit et
montré en détail dans le Document d'information que l'orientation de rotation
électromagnétique des atomes d'un non-conducteur est différente de celle des
atomes du conducteur, et donc se produira des résultats différents des mêmes
entrées d'énergie électromagnétique.
Cela se voit facilement
par le fait que, dans une résistance, pour une quantité donnée d'entrée de
courant électrique, la dégagement de chaleur augmente à mesure que le diamètre
augmente. Cela signifie que la propriété
de résistance a diminué. Sur un chef
d'orchestre, c'est tout le contraire. Si
le diamètre est augmenté la résistance est diminuée, mais ainsi est le
dégagement de chaleur. Encore une fois,
c'est une indication que les gyroparticles dans le mouvement actuel électrique
interagir avec chaque atome de la matière.
Ce même effet apparaît
de nouveau à induction électrique conventionnelle d'un chef d'orchestre en
interaction avec un champ magnétique. Expériences par
l'inventeur ont indiqué que la propriété d'induction conventionnelle est le
résultat de la même propriété de résistance.
Si l'on augmente le
diamètre d'un conducteur, longueurs reste la même, on diminue la quantité de
courant électrique produit par rapport au nombre total d'atomes dans les
conducteurs à l'étude. Ou, si l'on prend
un nombre donné de fils de même diamètre et de longueur, et se déplace un
aimant à travers eux, le courant produit sera beaucoup moins, que si l'on prend
le même fil de diamètre, mais qu'un seul fil et augmente sa longueur
considérablement et il forme alors dans une bobine formant le même nombre de
fils sur tout un côté et puis déplace l'aimant même sur un seul côté de cette
bobine, le courant électrique généré sera alors beaucoup plus grand. Raison :
la propriété de résistance. Il s'agit de
l'effet mécanique dans le maquillage électromagnétique gyroscopique et
l'orientation des atomes de tous les matériaux qui ont la capacité mécanique
pour effectuer une tâche donnée efficacement jusqu'à un point concernant
l'apport d'énergie électromagnétique supplémentaire et ensuite mécaniquement
provoque des résultats variables dès que ce seuil est dépassé.
Ceci et toutes les
autres pensées et innovations dans cela et les divulgations antérieures des
applications précédentes et le Document d'information déjà mis de l'avant
montrent qu'il existe différentes façons de libérer une source relativement
illimitée d'énergie de l'énergie électromagnétique qui constitue toute la
matière et qui résulte de cette invention mécaniques.
B. Prototypes opérationnels
Fig. 5 et Fig. 6 illustrent rugueux, prototypes fonctionnels
de cet aspect de l'invention. Ces
réalisations ne sont relativement inefficaces prototypes créés manuellement
dans le but de démontrer l'invention. Il
devrait aller de soi que les prototypes, par divers moyens mécaniques, dessins
et modèles, peuvent être facilement faits extrêmement efficaces et les modes de
réalisation illustrés sont présentés uniquement à des fins générales,
représentationnel.
Comme est illustrée à la Fig.5, il
n'y a fourni un générateur de courant électrique combiné et un moteur
électromagnétique comprenant un montés rotativement, aimant permanent 200,
une batterie 201, brosses et commutateur 202, roulements 203 et
puissance, arbre de montage 204 et un premier, primaire, magnétique
produisant 205 de bobine et une production électrique seconde,
secondaire avec 206. Les deux
bobines, 205, 206 sont juxtaposés ensemble en disposition parallèle avec
noyau simultanées-lignes centrales, avec l'aimant 200 positionné aux
côtés de bobine 205 à ou près de sa base axe avec l'axe de rotation de
l'arbre 204 placé perpendiculairement à l'axe.
Dans les prototypes,
une très petite pile 201, par exemple, la taille " N ", de 1,5
volts est utilisée. Lorsque le circuit est terminé, la batterie 201 convertit
une quantité incommensurable de sa masse en courant électrique (gyroscopiques
particules se déplaçant à la vitesse de la lumière) qui sort par le
communicateur et brosses 202 et puis entre dans la bobine magnétique de
chef d'orchestre produisant 205 issus, par exemple, calibre 14 ou 15
calibre fil de cuivre isolé, avec le poids total de l'être 205 bobine
par exemple soixante-dix à quatre-vingt dix livres. Cela provoque les atomes de bobine 205 pour
aligner extrêmement rapide puis en le relâchant certains de leur maquillage
électromagnétique (particules gyroscopiques) sous la forme d'un champ
magnétique. Ce champ puis interagit avec
les particules gyroscopiques qui composent le champ magnétique en venant les
atomes de la matière de l'aimant permanent 200.
Cela provoque l'aimant 200
tenter d'aligner son mouvement de champ magnétique avec le mouvement du
champ magnétique provenant des atomes de bobine 205, aboutissant à la
rotation de l'arbre 204 et aimant 200 auquel il est attaché. Cette puis change la position du collecteur
et les balais 202 par rapport aux positions initiales de l'uns des
autres, ce qui entraîne l'entrée courante électrique de batterie 201 pour
aller dans le sens inverse dans la bobine 205, causant les atomes de
bobine 205 à extrêmement rapidement inverse leur alignement et la
polarité de leur champ magnétique qui ils émettent. Le champ inversé interagit ensuite à nouveau avec le champ magnétique de
l'aimant permanent 200, amenant à tourner plus loin.
Ce processus est ensuite répété en continu,
produisant une rotation continue de l'arbre, 204, qui peut être utilisé
comme une source de puissance motrice de différentes manières. Une roue de ceinture de puissance 207 par
exemple à l'aide d'une ceinture continue de " V " est illustrée comme
une représentation générale de cette source d'énergie motrice pour produire un
travail utile, évident. Dans un essai de
prototype avec un petit 1,5 volts, tapez " N " pile, l'arbre 204 et
l'aimant 200 - rotation à grande vitesse pendant environ douze heures
avant de couler. En améliorant les
fonctionnalités de conception particulière du prototype et en utilisant les
piles durent plus longtemps, le temps de rotation de l'arbre 204 peut
être considérablement augmenté au point théorique avoisiner " perpétuel
" à toutes fins utiles. En même
temps, le champ magnétique alternatif produit par la bobine 205 induit
dans la bobine 206 induction électrique, qui provoque ensuite enrouler 206
pour produire un courant alternatif à travers ses " charger ",
quel courant peut faire dépasser la sortie classique de la batterie, 201. La source de batterie 201 peut être
remplacée si nécessaire.
Il est très important
de comprendre que, plus la longueur du fil conducteur dans la bobine 205,
le plus fort sera le champ magnétique produit et le moins courant qui va
compléter le circuit et revenir dans la batterie et détruire la source
mécanique du courant électrique. Cet
effet peut être renforcé par augmentation du diamètre du fil conducteur dans la
bobine 205 et puis qui augmente considérablement sa longueur encore
davantage dans la bobine.
Raison : Les particules
gyroscopiques qui composent le courant électrique interagissent avec les atomes
de bobine 205. Les atomes plus en
bobine 205, par rapport à sa longueur, plus il faut la gyroparticles du
courant électrique pour les influencer et sortir de l'autre extrémité de la
bobine. Il est alors facilement vu que si le sens du courant qui circule dans
la bobine 205 est alors inversé, cela puis encore augmente le temps de
latence. Raison : Les particules gyroscopiques ont inertie et sont censés se
déplacer à la vitesse de la lumière et ils interagissent avec les particules
gyroscopiques qui composent les atomes des bobines conductrices 205. Ces atomes possèdent également d'inertie, et
lorsque le sens du courant dans la bobine 205 est inversé, le courant
entrant puis entre en collision avec le courant déjà en bobine 205 va
dans la direction opposée.
Cela provoque une brève
hésitation pendant le temps que du courant déjà dans la bobine se voit
contrainte de son inversion, ainsi puis inversion du sens des atomes au sein de
la bobine 205 qui ont déjà été influencé à sont alignés. Cela provoque une force constante tout au
long du circuit, mais ne permet pas très courant pour retrouver la batterie 201
à détruire les moyens mécaniques qui a initié la libération d'électrique
actuelle en premier lieu. Donc, il
devrait être également entendu que, plus vite le sens courant s'inverse dans la
bobine de 205, plus efficacement la question de batterie 201 est
convertie en énergie électrique pure 2 (E = mC2), sans destruction
de la situation mécanique qui déclenche la libération de courante électrique.
Il est également
important de comprendre que, le plus fort champ magnétique provenant de la
masse de l'aimant 200, la plus grande sera sa vitesse de rotation. En outre, plus le champ magnétique provenant
de la masse de la bobine 205, plus grande sera la rotation vitesse
d'aimant 200 et, jusqu'à un certain point, le plus élevé l'entrée de
courant électrique de batterie 201, plu la vitesse de rotation de
l'aimant 200.
Raison : plus le
courant électrique jettent bobine 205, plus grande sera la proportion
des atomes en bobine jusqu'à 205 qui sont alignés. Cela a probablement la même relation fait
réaliser l'alignement atome dans les matériaux magnétiques classiques. Une fois toutes les alignement atome est atteinte
en bobine 205, aucune quantité de courant ne provoquera ces atomes
augmenter la force de l'émission de champ magnétique de ces atomes.
Par conséquent, il
devrait être clair que, pour une entrée donnée d'un courant électrique de
batterie 201, la conception plus efficace est l'un dans lequel les
atomes de la plupart des bobines 205 sont influencés à alignement atome
par ce courant électrique donné, ce qui signifie augmenter le diamètre et la
longueur du fil conducteur de bobine 205 jusqu'à ce que la force du
champ magnétique produite est suffisante pour entraîner la rotation de l'aimant
200 à une vitesse qui permet aucune ou au moins très peu de courant qui
provient initialement de la batterie 201 pour compléter le circuit et se
remettre en batterie 201 et détruire ou réduire l'effet mécanique qui
induit la transformation de la matière de batterie 201 en courant
électrique en premier lieu. Encore une
fois cela désiré effet peut être augmentée en augmentant la force du champ
magnétique émis par les atomes de l'aimant permanent 200.
Dans le second prototype, incarnation de la Fig.6,
la structure et le fonctionnement du prototype est sensiblement identique à
celui de la Fig.5 à l'exception importante étant que les éléments arbre 304
et aimant 300 (et connexes sous-éléments, 302, 303 et 307)
sont positionnés à l'intérieur d'et dans le noyau de la bobine primaire 305,
par rapport à la mise en place les éléments aimant 200 et arbre 204 à
côté et le long côté de la bobine 205 de la Fig.5. Par conséquent, par souci de concision, une description
détaillée des éléments de la Fig.6 ne se reproduira pas, mais il est à
noter que les éléments correspondants et analogues et des sous-éléments sont de
même comptés dans la Fig.5 et Fig.6.
Il est également important à nouveau un stress du
fait que les dessins de prototype montrés sont présentés simplement pour
prouver la justesse de l'invention, et il devrait être clair que l'invention
peut être rendue extrêmement plus efficace en utilisant la totalité du champ
magnétique produit par bobine 205 et la conception de l'aimant 200 d'une
forme et une force qui interagit de manière efficace avec la majorité des
champs magnétiques de bobine 205.
Les prototypes illustrés est relativement très inefficace à cet égard,
mais malgré cela, les résultats de l'invention elle-même dépassent largement
l'état de la technique quant à l'utilisation de courant électrique de quelque
source et l'interaction avec un moteur électrique ou quelque travaux ont été
réalisés par convention.
La requérante se sent il est très important de
nouveau stress, dans la construction de beaucoup de différentes conceptions de
cette invention, il faut tenir compte du fait que l'énergie contenue dans la
champ de force d'un aimant de type est l'énergie qui compose les atomes de la
matière dont il s'agit ! Cette énergie est une entité réelle avec, il
croit, une action gyroscopique. Il est
littéralement équation d'Oliver Heaviside E = mC2 et on croit que
cette énergie se déplace à la vitesse de la lumière et représente toute la
matière. Et que cette énergie a un effet
de pression constante vers les atomes de la matière d'où ils provenaient,
semblable à la pression hydraulique. Cet
effet n'est en outre plus entièrement compris en indiquant les résultats
suivants, obtenus de l'expérimentation par la requérante dans le processus de
cette invention.
a) Lorsque le système est initialement fixé à une
batterie de N de taille de 1,5 volts 201 et 301 et les entités de
rotation 200 ou 300 et connexes aimant sont placées près d'ou
dans le centre de la bobine 205 ou 305, on observe les résultats
suivants :
Si le courant électrique produit en bobine 206 (306)
est alors alimenté en bobine 205 (305) conformément à la polarité
correcte, la vitesse de rotation de l'aimant, 200 ou 300 accélérera
ensuite. Si réinjectés dans bobine 205
(305) à inversion de polarité, va ralentir la vitesse de rotation de
l'aimant 200 (300).
Cela prouve que la force totale de la bobine 205
(305) interagissant avec l'aimant 200 (300) est plus
grande lorsque l'énergie électrique de la bobine 206(306) est
reversé dans bobine 205 (305), puis lorsque seulement l'énergie
électrique initiale de batterie 201 (301) est injecté dans la
bobine 205 (305) ! Quand
deux ou trois batteries sont électriquement reliées en série, afin de créer par
exemple trois ou 4,5 volts d'entrée électrique, cet effet est multiplié.
N'oubliez pas, jusqu'à un point, plus l'entrée électrique, plus le pourcentage
de l'alignement atome au sein de la bobine 205 (305).
Cela prouve encore que le courant électrique produit
en bobine 206 (306) est le résultat des particules gyroscopiques
d'énergie libérée des champs magnétiques qui vient de la make-up
électromagnétique des atomes de bobine 205 (305) et ne fait pas
partie de l'énergie électrique initiale les atomes qui composent les matériaux
de batterie 201 (301) !
La bobine 206 (306) peut être prise hors du système, ou
son courant électrique alimentée de ce système, et la vitesse de rotation de
l'aimant 200 (300) ne changera pas observable. Cependant, la vitesse de rotation de l'aimant
200 (300) changera sensiblement lorsque le courant électrique de
la bobine 206 (306) est reversé dans bobine 205 (305)
!
Maintenant un résultat différent :
b) Lorsque le
courant électrique de batterie 201 (301) s'affaiblit jusqu'à ce que
le champ magnétique provenant de bobine 205 (305) a affaibli et
diminué permettant le champ magnétique de l'aimant rotatif 200 (300)
pour étendre et ensuite sensiblement induire courant électrique dans la bobine 206
(306) et dans la bobine 205 (305), puis des résultats
inverses sont observés. Lorsque le champ magnétique de la bobine 205 (305)
est grand, le champ magnétique de l'aimant 200 (300) reste
valable ! Si bobine 206 (306)
est alors court circuit, la rotation de l'aimant 200 (300) va
ralentir sensiblement.
Si un courant
électrique de la bobine 206 (306) est alimenté en bobine 205 (305)
à inversion de polarité, la rotation de l'aimant 200 (300)
s'arrête. Si réinjectés dans bobine 205
(305) en polarité, va ralentir la rotation de l'aimant 200 (300). À ce moment-là, la rotation de l'aimant 200
(300) s'accélérera pas, peu importe comment connecté !
Ces résultats montrent
que, pour l'instant, le champ magnétique de l'aimant 200 (300) a
sensiblement induit un courant dans les bobines 206 (306) et 205
(305) qui s'oppose à la rotation de l'aimant 200 (300). Cet effet a déjà été expliqué mécaniquement,
et il a été démontré que la Loi de Lenz est une simple observation de cette
explication mécanique. Ces résultats
démontrent que le développement et réduction des champs magnétiques de bobine 205
(305) et 206 (306) ne pas sensiblement effectuent
l'autre négativement.
Parce que les champs
magnétiques résultants de toutes les bobines sont le résultat de fluctuations
alignement atome dans les bobines ! N'oubliez
pas, les particules d'énergie gyroscopique qui composent les champs magnétiques
ont un effet de la pression hydraulique vers les atomes d'où ils
proviennent. Aussi n'oubliez pas que les
atomes qui composent la matière de l'aimant permanent 200 (300)
restent fixes quant à direction d'alignement atome ! Par conséquent, l'effet de la pression
résultant d'un champ adverse qui induit de l'aimant 200 (300),
est immédiate. Comme c'est la pression
hydraulique.
Toutefois, le champ
magnétique émis par les atomes de bobine 205 (305) par rapport à
induction dans les atomes de bobine 206 (306) fluctuent et sortir
de l'étape, pour ainsi dire et c'est pourquoi, en harmonie avec l'autre. L'effet de la pression de l'induction de
bobine 205 (305) en bobine 206 (306) est un effet
d'actions et de réactions qui renforce l'action de retournement des atomes de
bobine 205 (305) et dans les atomes de bobine 206 (306).
Cette action est vu à nouveau lorsque
l'invention est accrochée dans cent-quinze volts en courant alternatif, et
batterie 201 (301) n'est pas utilisé. L'aimant 200 (300) ne tournera pas
même si le champ magnétique de la bobine 205 (305) est fort et
est en alternance. Raison : Le champ
magnétique fluctuant est si rapide, que la masse d'inertie de l'aimant 200 (300)
ne peut pas commencer dans un sens avant que le champ magnétique de la bobine 205
(305) a infirmé, ainsi, causant aimant 200 (300) à
vibrer seulement au microscope à 60 cycles par seconde. Et, si une ampoule de 60 watts est accrochée dans le système de bobine 205
(305), il s'allumera seulement faiblement. Et il y a un décalage de deux à trois secondes
avant il s'allume encore faiblement.
Si alors serpentin 206
(306) est relié à un compteur, il y a une lecture de quarante-neuf
volts, et si le compteur est remplacé par une autre ampoule de 60 watts, il
s'allumera seulement très faiblement. Cependant, l'ampoule de 60 watts accroché à
bobine 205 (305) va maintenant devenir sensiblement plus lumineux
! Cela montre encore une fois que les
résultats des actions et de réactions des atomes des bobines ne nuisent pas
sensiblement les uns aux autres. En
raison de la période de latence (en décalage, pour ainsi dire), ce qui renforce
l'alignement atome retournement des bobines.
De cette explication
supplémentaire de l'invention, il est considéré que les résultats souhaitables
peuvent être obtenus par le texte suivant:
Par exemple, de la Fig.6
l'aimant 300 peut-être être conçus et/ou être situés à une distance de
l'intérieur diamètre de bobine 305 et bobine 306, par lequel la
majorité du champ magnétique de l'aimant 300 ne coupe pas la réalisation
d'une boucle de bobine 305 ou 306. Pourtant, le champ magnétique alternatif
produit par bobine 305 devrait avoir efficacement la majorité de ses
particules gyroscopiques interagissant avec la majorité des particules qui
composent le champ magnétique de l'aimant permanent 300, mais ne réagit
pas directement avec les atomes qui composent la bobine 305 ou aimant 300
gyroscopiques !
Quand les lignes de
force magnétique, de la Croix (300) aimant 200 à angle droit avec
les fils conducteurs de bobine 205 (305), 206 (306),
une action de freinage soient engagées.
Il est à noter que, comme le diamètre intérieur des augmentations (305)
bobine 205, le pourcentage de temps de l'effet de freinage diminue.
Dans cette même veine
d'enseignement, les segments de commutateur 202 (302) peuvent
être faites de grand diamètre et la zone de pinceaux petits, selon lequel,
lorsque les brosses traversent les lacunes dans les segments du collecteur, il
y n'aura aucun court-circuit à tout moment directement à la batterie 201 (301).
En combinant les bagues
collectrices et les pinceaux (les bagues collectrices peut être faites de petit
diamètre) sur le côté ou les côtés des brosses et des segments de commutateur 202
(302), puis batterie 201 (301) n'a pas à tourner avec
aimant 200 (300).
Le calibre 14 et 15
calibre fil de cuivre isolé pesant soixante-dix et quatre-vingt-dix livres
respectivement (31,5 et 40,5 kilogrammes) utilisés pour le bobinage du moteur 205
(305) et la bobine du générateur 206 (306),
respectivement, dans les premiers prototypes fabriqués à la main des modes de
réalisation de la Fig.5 et Fig.6, uniquement, à des fins de
démonstration viennent godets standards de différents poids de points de vente
en gros.
Il a été ensuite
enroulé en rouleaux comme indiqué, et, comme enseigné, le fil conducteur plus
utilisé, les meilleurs seront les résultats.
Les aimants 200 et 300 ont été chacune au départ sur un
cube de 2,5 pouces (6,25 cm) et peuvent être de toute taille et la force
souhaitée.
Dans une démonstration
supplémentaire, rugueuse, fabriqué à la main, prototype de l'invention du type
de travail illustré à la Fig.6, la bobine primaire ou moteur 305 a
été faite de fil de cuivre de calibre 5 dans un fil unique, continu, pesant
environ 4 100 poids (1 845 kg) avec un diamètre de bobine boucle de 4,5 pieds
(135 cm), tandis que la bobine secondaire ou générateur de 306 a été
faite de fil de cuivre de calibre 24 à un seul fil continu pesant environ 300
poids (135 kilogrammes) avec la même, diamètre de boucle de bobine
approximative de 4,5 pieds (135 cm), avec les deux bobines, 305, 306 par
hasard formant un cylindre d'environ 30 pouces (75 centimètres) de long. Les
bobines, 305, 306 ont été construits autour d'un corps de base en fibre
de verre cylindrique, d'environ 200 poids (90 kilogrammes) ayant un axe de la
ligne médiane verticale, longitudinale.
L'aimant tournant 300
était composée de six, distinct, colonnes cylindriques magnétiques
parallèles espacés et disposés sur la périphérie de la surface cylindrique
creux en fibre de verre d'environ vingt pouces (cinquante centimètres) de
diamètre. Chaque colonne a 30 pouces (75
cm.) de long et était composé d'un empilement de 70, aimants individuels bague
en céramique en forme de disque comme faite par Jobmaster aimants de
Randallstown, Maryland, 21133, États-Unis d'Amérique Chaque disque a une
épaisseur de sept-seizièmes de pouce (1,09375 cm), diamètre intérieur de 1
pouce (2,5 cm.) et un diamètre extérieur de 4 pouces (10 cm.). Les disques ont
été empilés et attachés ensemble dans des tubes de fibre de verre de diamètre
de 4 pouces (10 cm.) montés longitudinalement sur la surface intérieure du
cylindre en fibre de verre diamètre 20 pouces (50 cm.).
L'aimant composite 300
avait un poids total d'environ 400 poids (180 kg) et une longueur totale de
30 pouces (75 cm.) et un diamètre approximatif de 20 pouces (50 cm.).
L'aimant 300 a
été monté pour la rotation sur un axe horizontal 304 traversant le noyau creux
des bobines 305, 306, traversant le point central de l'axe longitudinal
du cylindre et perpendiculairement à l'axe longitudinal de l'aimant 300 pour
une rotation dans la zone centre ouvert des bobines cylindrique disposés 305,
306 avec les axes longitudinaux des bobines étant disposés verticalement.
Avec une source de
batterie CC, 301 de deux batteries de 12 volts lanterne et dix-sept
batteries de lanterne de 6 volts en série (pour un total de 126 volts), une
tension mesurée de 126 volts et un courant mesuré de 99 milliampères dans la
bobine primaire 305 ont été notées.
Simultanément, une
lecture de tension de volts 640 et une mesure d'intensité supérieure à 20
milliampères ont été relevées dans le secondaire ou générant bobine 306,
avec l'aimant 300 tournant à une vitesse de 120 tours par minute
(tr/min). Ainsi, le système était sortie et produisant de l'énergie génératrice
électrique utilisable 306 serpentin supérieur à 102 % de celui entré
dans la bobine du moteur 305 !
Ce surplus d'énergie électrique utile, bien sûr, est en plus la plus
utile énergie mécanique disponible à l'exemplaire drive décollage 307 sur
l'axe de rotation 304, sur lequel la livre 400, aimant long 30 pouces 300
tournait à 120 tr/min !
Ainsi, l'invention, en
utilisant l'énergie des particules dans le champ magnétique, gyroscopiques
produit un rendement énergétique plus grande que l'apport d'énergie dans le
système, produisant ainsi des résultats au-delà des enseignements scientifiques
actuellement reconnus du monde.
Ce prototype atteint
exactement ce qui a déjà été décrite en détail dans les demandes de brevet
antérieures du demandeur. Il a été utilisé simplement dans ce prototype un
aimant plus fort et un plus grand diamètre des câbles de grande longueur, possédant
un nombre considérablement plus élevé d'atomes alignés lorsque le courant est
mis dans le système et utiliser un plus grand nombre d'atomes dans la bobine du
générateur de fine diamètre des fils.
Alors que les résultats
de l'énergie libérée de ce prototype particulière est très impressionnant à
d'autres, la requérante a de toujours qu'effleurer la surface de l'énergie qui
peut être libérée en utilisant les principes de la présente invention.
Encore une fois, comme
l'a déjà été souligné, la conception plus efficace, est l'un dans lequel le
moins d'entrée de courant provoque la plus grande quantité de l'alignement de
l'atome.
Ces données ne
constituent aucune dérogation à des travaux antérieurs du demandeur, mais il ne
doit plus le document ce qui a déjà été souligné dans les demandes de brevet
antérieures.
Varier la tension
continue pour batterie source 301 spectacles qui l'efficacité évidente
continuera d'augmenter tant que la tension d'entrée va vers le haut ! En outre, l'avantage de facteur de puissance
de l'invention, combinée avec l'inertie de la 400 livres aimant 300 tournant
à 120 tours/minute (tout en causant le générateur électrique à sortir de plus
de 100 % de l'apport énergétique) prouve l'invention d'être considérablement
plus efficace même à cette lente tr/min à 100 %.
Il est prévu que le
prochain prototype utilisera Super conductrice type matériel pour la bobine 305
avec un aimant ayant un champ magnétique comparable à celui de l'aimant
crycogenic-type par rapport au pourcentage d'alignement de l'atome ou de la
taille de 300. Cela provoquera la
taille de l'appareil étant beaucoup plus petit et fonctionne encore avec la
disposition sortie étant beaucoup plus grand que le prototype vient de décrire.
Raison : La définition de type
plus efficace est l'une par laquelle le moins d'entrée de courant dans la
bobine du moteur produit l'alignement atome plus grand de ladite moteur bobine
et avoir rotatif aimant également comparable dans la force, par rapport à la
taille.
L'invention peut être faite sans utiliser la bobine
206 (306) et la production d'énergie mécanique juste utile.
Bobine 206 (306)
peut être fusionné ou enroulé avec bobine 205 (305).
L'aimant 200 (300)
peut être un électro-aimant, un à un aimant permanent, un aimant cryogénique ou
un aimant.
La conception d'aimant 200 (300)
peut créer un champ magnétique fort, mais non.
La conception de bobine
205 (305) permet de conserver davantage le champ magnétique de
l'aimant 200 (300).
Courant alternatif
(C.A.) peut être utilisé à la place de la batterie de courant continu (CC) 201
(301), si l'aimant 200 (300) est conçu en conséquence.
Les bobines 205 (305)
et 206 (306) peuvent être composés de plusieurs bobines plutôt
qu'une seule bobine.
L'aimant 200 (300)
peut être composé de plusieurs aimants individuels plutôt que juste un simple
aimant.
De ce qui précède, il
faut bien comprendre que, contrairement à l'enseignement de l'état de la
technique, ce qui suit est souhaité dans la conception de la bobine 205/305 en
vertu des principes de la présente invention :
a) courant initialement coulant dans et à
travers la bobine doit être faible par rapport à la production d'énergie du
système ;
b) un fil de diamètre assez important ou son
équivalent est utilisé pour la batterie ;
c) un nombre relativement important de boucles de
bobines ou des bobines est utilisé ;
d) une longueur relative de longue et continue de
fil bobine ou son équivalent est utilisée ; et
e) le plus grand magnétisme pour une masse donnée de l'aimant 200/300 est
souhaité, mais peut être conçu de sorte que les lignes de force de magnétique
ne coupera pas les bobines à angle droit.
La présente invention
s'applique à tout dispositif mécanique, qui est administré par énergie
électrique. Conformément aux principes
de la présente invention, le dispositif mécanique doit être conçu dans lequel
le courant électrique aussi bien que sera possible ne peut pas revenir à sa
source, mais le circuit est complété, auquel cas la " force de pression
" est constante dans tout le système.
Ce qui a été inventé,
construit et divulguée est une invention de l'immense importance pour le
bien-être du monde entier. Il y aura de nombreux appareils construits à partir
de ce qui a été montré et enseigné. Il
devrait maintenant être connu que toute matière est composée d'énergie
électromagnétique et qu'il existe de nombreux moyens mécaniques pour libérer
cette énergie, comme cela a été dit tout au long de l'avant cinq, demandes de
brevet relatives présentes et le Document d'information. Tous ces développements futurs seront à la
suite de la présente invention qui - libère de l'énergie au-delà des mécanismes
de libération des énergies conventionnelles, avant cette invention.
Certaines des approches
fondamentales de l'invention sont décrits ci-dessous :
l. Tout dispositif qui utilise un moyen par lequel le courant électrique
(énergie électromagnétique) est maintenu dans un ou plusieurs membres en dehors
de la source de courant électrique original, a déclaré et puis, en conséquence,
est capable de produire un mouvement électromagnétique continu ou courant si
vous le souhaitez au-delà des enseignements scientifiques présents.
2. Tout dispositif qui libère l'énergie électromagnétique se composent de
matière à un tel degré impressionnant comme le fait cette invention qu'il défie
plusieurs d'entre les lois actuelles acceptées de physique et génie électrique
à partir de ce moment.
3. Que la libération d'énergie est nettement plus élevé et dans certains cas
plus contrôlables que les moyens classiques de libération d'énergie de ce
temps.
Car de nombreuses
variables et différents modes de réalisation peuvent être faites dans le cadre
du concept inventif enseigné ici, et parce que de nombreuses modifications
peuvent être faites dans les modes de réalisation détaillées ici descriptive
aux prescriptions de la Loi, il doit être entendu que les détails qui précèdent
doivent être interprétés comme illustration et pas dans un sens restrictif.
CHARLES FLYNN: CADRE MAGNETIQUE
Brevet américain 6 246 561 12 juin 2001 Inventeur: Charles J.
Flynn
MÉTHODES POUR CONTRÔLER LE CHEMIN D'ACCÈS DE FLUX
MAGNÉTIQUE DE A
AIMANT PERMANENT ET DES DISPOSITIFS INCORPORANT LA MÊME
CHOSE
Ce
brevet couvre un appareil qui est censé avoir une puissance plue que la
puissance d'entrée nécessaire pour l'exécuter.
RÉSUMÉ
Un
périphérique à un aimant permanent comprend un aimant permanent ayant nord et
pôle Sud visages avec un premier morceau de pôle positionné adjacent un pôle
visage son et un deuxième morceau de pole positionné adjacente l'autre pôle
face à celle-ci afin de créer au moins deux chemins possibles de flux
magnétique. Une première bobine de
contrôle est positionnée le long du chemin un flux et une deuxième bobine de
contrôle est positionnée le long du chemin autres flux, chaque bobine étant
relié à un circuit de commande pour commander la mise sous tension. Les bobines de commande peuvent être
alimentés dans une variété de façons à motif souhaitable obtenu et les
dispositifs statiques, y compris les dispositifs à mouvement alternatif
linéaires, dispositifs de mouvement linéaire, dispositifs de mouvement rotatif
et conversion de puissance.
DESCRIPTION
DOMAINE DE L'INVENTION
Cette
invention se rapporte généralement aux dispositifs de l'aimant permanent et
plus particulièrement, à un aimant permanent composant contrôle où le débit du
flux d'un aimant permanent est contrôlé entre deux ou plusieurs chemins de flux
en utilisant chronométré livraison des signaux électriques à travers une ou
plusieurs bobines placés le long d'au moins un des chemins de flux. Aimant permanent contrôle composants peuvent prendre une variété de
configurations, facilitant l'utilisation de ces composants dans une variété
d'applications, y compris les applications impliquant la production de
mouvement alternatif, linéaires, et un mouvement rotatif et conversion de
puissance. Plusieurs dispositifs d'un
mouvement rotatif de roman à un aimant permanent des constructions moteurs qui
opèrent en contrôlant le chemin du flux magnétique d'un ou plusieurs aimants
permanents sont décrites, telles constructions de moteur rotatif aimant
permanent ayant augmenté l'efficacité et les caractéristiques de couple plus
souhaitables par rapport à beaucoup actuellement utilisé des moteurs.
CONTEXTE DE L'INVENTION
La force magnétique d'attraction
est couramment utilisée dans une variété de types de périphériques à un aimant
permanent y compris moteurs linéaires et rotatifs. Dans le domaine de ces dispositifs à un
aimant permanent, il y a une poursuite continue d'accroître l'efficacité et de
complexité réduite.
Par
conséquent, un objet de la présente invention est de fournir un élément de
contrôle à un aimant permanent dont le chemin d'accès d'un niveau donné du flux
de l'aimant permanent peut être contrôlé par un moindre niveau de flux
électromagnétique.
Un
autre objet de la présente invention est de fournir un élément de contrôle à un
aimant permanent où, presque la totalité du flux d'un aimant permanent peut
être commutée entre au moins deux chemins différents flux de la composante de
contrôle à un aimant permanent afin de permettre un travail utile sous forme de
mouvement linéaire alternatif et rotatif.
Encore
un autre objet de la présente invention est de fournir des composants du
système à un aimant permanent et des constructions moteurs quel flux de
contrôle de chemin d'accès est fourni par énergisant un électro-aimant 10 pour
s'opposer au flux magnétique d'un ou plusieurs aimants permanents.
Un
autre objet de la présente invention est de fournir des composants du système à
un aimant permanent et des constructions moteurs quel flux de contrôle de
chemin d'accès est fourni par énergisant un électro-aimant pour faciliter le
flux magnétique d'un ou plusieurs aimants permanents.
Encore
un autre objet de la présente invention est de fournir à un aimant permanent
moteurs 15 autres constructions comportant des caractéristiques de
fonctionnement améliorés.
RÉSUMÉ DE L'INVENTION
Ces
et autres objets de l'invention sont atteints par un appareil qui, sous un
aspect, est un périphérique à un aimant permanent, comprenant un aimant
permanent ayant faces nord et pôle Sud, un premier morceau de pôle, un deuxième
morceau de poteau, une première bobine de contrôle, une deuxième bobine de commande
et circuit signifie, la première pièce polaire positionnée à côté du pôle Nord
face de l'aimant permanent et comprenant une première partie de chemin d'accès,
un chemin de la deuxième partie et troisième partie, la première partie de
chemin d'accès s'étendant au-delà d'un périmètre de la face du pôle Nord et la
deuxième partie de chemin d'accès s'étendant au-delà du périmètre du pôle Nord
face à définir tout d'abord et deuxième flux chemins de flux magnétique émanant
de la face du pôle Nord de l'aimant permanent, la première partie de chemin
d'accès de la première pièce de pôle relié à la deuxième partie de chemin
d'accès de la première pièce polaire de la troisième partie qui s'étend à
travers le visage du pôle Nord de l'aimant permanent, le deuxième morceau de
pole positionné adjacente le visage du pôle Sud et dont une première partie de
chemin d'accès et une deuxième partie de chemin d'accès, la première partie de
chemin d'accès s'étendant au-delà d'un périmètre de pôle Sud font face et
largement alignent sur la première partie de chemin d'accès de la première
pièce de pôle, le deuxième chemin partie s'étendant au-delà du périmètre de la
face du pôle Sud et sensiblement alignés avec la deuxième partie de chemin
d'accès de la première pièce polaire, la première spire de contrôle placée
autour de la première partie de chemin d'accès de la première pièce de la pole,
la deuxième bobine de contrôle placée autour de la deuxième partie de chemin
d'accès de la première pièce polaire, les circuits connectés à chacun de la
bobine de commande première et la deuxième bobine de contrôle pour dynamiser
alternativement la première Spire et la deuxième bobine de manière séquentielle
chronométrée.
Un
autre aspect de la présente invention fournit une méthode pour contrôler le
chemin du flux magnétique d'un aimant permanent qui consiste à placer une pièce
polaire premier adjacent un premier visage de pôle de l'aimant permanent afin
d'avoir au moins la première et deuxième parties de chemin s'étendant au-delà
d'un périmètre de la première pole face.
Un deuxième morceau de poteau est placé adjacent un deuxième visage de
pôle de l'aimant permanent afin d'y inclure au moins une partie qui
sensiblement s'aligne sur les portions de chemin d'accès de première et
deuxième de la première pièce polaire.
Une première bobine de contrôle est placée le long et autour de la
première partie de chemin d'accès de la première pièce polaire et une deuxième
bobine de contrôle est placée le long et autour de la deuxième partie de chemin
d'accès de la première pièce polaire. La
première spire de contrôle est sous tension à plusieurs reprises dans un flux
magnétique d'aimant permanent s'opposer de manière afin d'empêcher les flux
magnétique de l'aimant permanent qui traversent la première partie de chemin
d'accès de la première pièce de pôle, et la deuxième bobine de contrôle est
sous tension à plusieurs reprises dans un flux magnétique d'aimant permanent
s'opposer de manière afin d'empêcher les flux magnétique de l'aimant permanent
qui traversent la deuxième partie de chemin d'accès de la première pièce
polaire.
Encore
un autre aspect de la présente invention fournit une méthode pour contrôler le
chemin du flux magnétique d'un aimant permanent en plaçant une pièce polaire
premier adjacent un premier visage de pôle de l'aimant permanent afin d'avoir
au moins la première et deuxième parties de chemin s'étendant au-delà d'un
périmètre de premier pôle font face. Un
deuxième morceau de poteau est placé adjacent un deuxième visage de pôle de
l'aimant permanent afin d'y inclure au moins une partie qui sensiblement
s'aligne sur les portions de chemin d'accès de première et deuxième de la
première pièce polaire. Une première
bobine de contrôle est placée le long et autour de la première partie de chemin
d'accès de la première pièce de pôle, et une deuxième bobine de contrôle est
placée le long et autour de la deuxième partie de chemin d'accès de la première
pièce polaire. Alternativement, les
étapes suivantes sont effectuées de manière répétée : i énergisant la première spire de contrôle
dans un flux magnétique d'aimant permanent aidant de manière à coupler avec la
quasi-totalité des flux magnétique de l'aimant permanent tel que
substantiellement aucun flux magnétique de l'aimant permanent ne traverse la deuxième
partie de chemin d'accès de la première pièce du pôle lors du premier contrôle
de bobine est tellement excitée ; et
(i)
énergisant la deuxième bobine de contrôle dans un flux magnétique d'aimant
permanent s'opposer de manière à coupler avec la quasi-totalité des flux
magnétique de l'aimant permanent tel que substantiellement aucun flux
magnétique de l'aimant permanent ne traverse la première portion de chemin
d'accès de la première pièce de la pole lors de la deuxième bobine de contrôle
est tellement excitée.
Un
autre aspect de la présente invention fournit méthode pour contrôler le chemin
du flux magnétique d'un aimant permanent en plaçant une première pièce polaire
adjacente un premier visage de pôle de l'aimant permanent afin d'avoir au moins
la première et deuxième parties de chemin s'étendant au-delà d'un périmètre de
la première face de pôle et en plaçant une deuxième pièce polaire adjacente
font face à un deuxième pôle de l'aimant permanent afin d'y inclure au moins
une partie qui sensiblement s'aligne sur les portions de chemin d'accès de
première et deuxième de la première pièce polaire. Une première bobine de contrôle est placée le
long et autour de la première partie de chemin d'accès de la première pièce de
pôle, et une deuxième bobine de contrôle est placée le long et autour de la
deuxième partie de chemin d'accès de la première pièce polaire. Alternativement, les étapes suivantes sont
effectuées de manière répétée : i énergisant la première spire de contrôle dans
un flux magnétique d'aimant permanent aidant de manière à coupler avec la
quasi-totalité des flux magnétique de l'aimant permanent tel que
substantiellement aucun flux magnétique de l'aimant permanent ne traverse la
deuxième partie de chemin d'accès de la première pièce du pôle lors du premier
contrôle de bobine est tellement excitée ; et
(ii)
énergisant la deuxième bobine de contrôle dans un flux magnétique d'aimant
permanent s'opposer de manière à coupler avec la quasi-totalité des flux
magnétique de l'aimant permanent tel que substantiellement aucun flux
magnétique de l'aimant permanent ne traverse la première portion de chemin
d'accès de la première pièce de la pole lors de la deuxième bobine de contrôle
est tellement excitée.
BRÈVE DESCRIPTION DE
L'INVENTION
Pour une meilleure compréhension
du présent renvoi invention peut être faite pour les dessins annexés dans
lequel :

Fig.1 est une vue en perspective d'un dispositif
magnétique dans lequel le flux magnétique provenant d'un membre magnétique
traversent un seul chemin pour produire une force d'accouplement ;

Fig.2 est une vue en perspective d'un dispositif magnétique dans lequel le flux
magnétique provenant d'un membre magnétique se divise entre deux chemins ;
Fig.3 est une vue de
côté de deux membres magnétiques organiser en parallèle entre les pièces
polaires ;
Fig.4 est une vue de
côté de deux membres magnétiques disposés en série entre les pièces polaires ;
Fig.5 et Fig.6 ont les vues d'un
dispositif d'aimants permanents dont un à un aimant permanent ayant les pièces
polaires positionné contre les parois de la pole et notamment une armature
mobile ;
Fig.7, Fig.8 et Fig.9 ont les vues
d'un dispositif d'aimants permanents dont un à un aimant permanent ayant les
pièces polaires positionné contre les parois de la pole à fournir deux chemins
d'accès de flux magnétique et comprenant une armature mobile qui peut être
positionnée le long de chaque chemin d'accès de flux magnétique ;
Figs.10, 10A-10H sont vues en perspective
des différents modes de réalisation de composants de contrôle à un aimant
permanent 5 incluent deux ou plusieurs chemins de flux magnétique ;

Figs.11, 11A-11F sont les vues d'un
dispositif d'aimants permanents dont un à un aimant permanent ayant les pièces
polaires positionné contre les parois de la pole et notamment une armature
mobile et une dérivation permanente qui s'étend entre les pièces polaires ;


Figs.12, 12A-12E sont les vues d'un dispositif d'aimant permanent avec
deux chemins comprenant deux voies de contournement ;
Figs.13A-13C ont les vues d'un appareil à mouvement
alternatif linéaire à un aimant permanent ;
Fig.14 est une vue de côté d'un appareil à mouvement alternatif linéaire
électromagnétique ;
Fig.15 est une vue de côté d'un appareil d'aimant
permanent avec deux chemins comportant des bobines de contrôle sous tension
d'une manière supérieure ;

Figs.16A-E sont une vue de côté d'un appareil à
mouvement alternatif linéaire avec bobines de contrôle sous tension d'une
manière supérieure ;

Figs.17A-17D représentent un autre mode de réalisation
d'un appareil à mouvement alternatif linéaire ;

Figs.18A-18E montrent un dispositif de mouvement
linéaire ;
Fig.19 est une vue en perspective éclatée d'un appareil à mouvement rotatif ;

Fig.20 est partiellement assemblés et couper la vue de l'installation d'un
mouvement rotatif des Fig.19 ;


Figs.21A-21E sont meilleurs vues de l'Assemblée
partielle de Fig.20, quelles vues représentent son mouvement de
rotation,
Fig.22 est une vue
Assemblée, écorché de l'appareil de mouvement rotatif de la Fig.19, y
compris un logement ;
Fig.23 est une vue en perspective éclatée d'un autre mode de réalisation d'un
dispositif de mouvement rotatif ;
Fig.24 est une vue en perspective de l'installation d'un mouvement rotatif des
Fig.23 assemblés ;
Figs.25A-25B ont fin vues
de l'appareil de mouvement rotatif de Fig.24 avec le capuchon
d'extrémité retirée pour exposer les membres de rotor ;
Figs.26-28 voir la vue de fin différentes
configurations pour déformer le sens de rotation dans l'appareil de mouvement
rotatif de Fig.24 ;

Figs.29A-29D ont des vues de la fin de l'installation
d'un mouvement rotatif des Fig.24 illustrant une séquence de ses mouvements de
rotation ;

Fig.30 est une vue en perspective partielle éclatée d'un autre mode de
réalisation d'un dispositif de mouvement rotatif ;
Fig.31 est une vue en perspective de l'installation d'un mouvement rotatif des
Fig.30 assemblés ;

Figs.32A-32D st vues haut de l'appareil de mouvement
rotatif de Fig.31 illustrant son mouvement de rotation ;
Fig.33 est une vue de
côté de l'appareil de mouvement rotatif de Fig.31 assemblés et y compris
un logement ;
Fig.34 est une vue en perspective d'un autre mode de réalisation d'un
dispositif de mouvement rotatif ;

Fig.35 est une vue de
dessus de l'appareil de mouvement rotatif de Fig.34 ;
Fig.36 est une vue en perspective du membre aimant permanent du rotor de
l'appareil de mouvement rotatif de Fig.34 ;

Fig.37 et Fig.38 montrent des
configurations alternatives pour la composante de contrôle intégrée à
l'appareil de mouvement rotatif de Fig.34 ;
Figs.39A-39D sont vues haut de l'appareil de mouvement
rotatif de Fig.34 dépeignent son mouvement de rotation ;

Figs.40-44 sont des variantes alternatives du circuit pour
contrôler la mise sous tension minutée de bobines de contrôle dans les
différents dispositifs de la présente invention ;
Figs.45A-45C et Figs.45X-45Z
sont vues de côté de deux dispositifs de conversion de puissance de chemin ;


Fig.46 est une vue schématique de la portion de
l'aimant permanent du rotor pour une utilisation dans certains modes de
réalisation du présent dispositif ;
Fig.47 et Fig.48 montrent des autres modes de réalisation d'un dispositif
de mouvement linéaire ;
Fig.49 est une vue de dessus d'un autre mode de réalisation d'un moteur
rotatif comme construction ; et
Fig.50 est une vue schématique de l'une des trois portions du stator de
l'appareil illustré à Fig.49.
DESCRIPTION DÉTAILLÉE DES DESSINS
Se référant maintenant aux
dessins, Fig.1 à Fig.4 sont fournies pour faciliter la
compréhension des divers aspects ou caractéristiques de la technologie utilisée
dans la présente invention. Fig.1
représente une unité de 10 ayant un flux magnétique produisant membre 12
qui peut être un aimant permanent ou électro-aimant avec les pôles
magnétiques 14 et 16 comme indiqué.
Pièces polaires 18 et 20 sont des pôles respectifs positionnés
adjacents 14 et 16 pour fournir un chemin d'accès pour le flux
magnétique de membre 12. Chaque pièce
polaire 18 et 20 a un visage de fin de morceau par pôle 22 et 24. Tel qu'utilisé dans cette spécification, il
est entendu qu'une pièce polaire, quelle que soit sa forme ou sa taille, est
préférence formée de fer doux, en acier ou un autre matériau magnétique, avec
le matériel préféré étant un qui donne faible réluctance, pièces faible
hystérésis et a une capacité de haute densité de flux magnétique. En conséquence, les pièces polaires divers communiqués
et décrit ci-après pourraient être de même de la construction de type
stratifié.
Se
référant à nouveau à Fig.1 une armature 26, également formé de
matériaux magnétiques, est montré avec des visages de fin 28 et 30 qui
sont positionnés et dimensionnés pour être placé des faces adjacentes de pôle
morceau fin 22 et 24, telle que lorsqu'il est ainsi positionné un tracé
essentiellement continu réticence faible 32 provient de flux magnétique
du pôle Nord 14, pièce polaire 18, à travers l'armature 26,
à travers pôle pièce 16, et au sud de pôles 16. Le flux magnétique qui voyagent le long de
ces 32 résultats de chemin en une force qui tend à maintenir l'armature 26
en position alignée sur des faces de pôle morceau fin 22 et 24.
Magnétique résultant de couplage ou tenue à l'arrachement F condition
entre pôles adjacents morceau fin visage 22 et fin induit face à 28 et
entre pôle adjacentes morceau fin face 24 et armature fin face 30,
peut être approchée par l'équation suivante :
![]()
où
B est le passage de la densité de flux magnétique à travers les faces
d'extrémité adjacentes et A est l'aire de la surface des faces d'extrémité
adjacentes. En supposant que, si B
est uniforme tout au long de trajet de flux 32 et que la surface A
de l'ensemble des faces d'extrémité 22, 24, 28, et 30 est le même, alors
la force de retenue totale FT26 de l'armature 26 contre les
pièces polaires 18 et 20 sera :
![]()
Dans la Fig.2
un dispositif 40 ayant le même flux magnétique produire de l'élément 12
avec les pôles magnétiques 14 et 16 est représentée. Les pièces polaires 42 et 44 sont
positionnés face à pôle adjacent respectif 14 et 16 pour fournir deux
chemins, par opposition à celle ci-dessus, pour le flux magnétique de l'élément
12, en particulier, la pièce polaire 42 comprend une première
partie de trajet 46 qui s'étend au-delà d'un périmètre de face nord
polaire 14 dans un sens et une seconde partie de trajet 48 s'étendant
au-delà du périmètre de la face nord polaire 14 dans une autre
direction. De même, la pièce polaire 44
comprend une première partie de trajet 50 qui s'étend au-delà du
périmètre de la face 16 du pôle sud dans une direction et une seconde
partie de trajet 52 qui s'étend au-delà du périmètre de la face 16 du
pôle sud dans une autre direction.
Chaque portion de la pièce polaire de trajet 46, 48, 50, 52 comporte
une face d'extrémité respective. Une
première armature 54 qui peut être positionnée de façon adjacente aux
faces d'extrémité des pièces polaires composants de chemin 48 et 52 fournit
un premier trajet de flux magnétique 56 et une seconde armature 58 est
ce qui peut être positionnée de façon adjacente aux faces d'extrémité des
pièces polaires composants de chemin 46 et 50 fournit un deuxième trajet
de flux magnétique 60. Si la zone
de transport de flux le long de trajets de flux 56 et 60 est la même que
la zone de flux de transport le long de trajet de flux 32 de la Fig.1,
la densité de flux magnétique le long de chaque trajet de flux 56 et 60 sera
demi de la densité de flux magnétique le long trajet de flux 32 de la Fig.1
parce que la même quantité de flux est réparti entre les deux comme des
chemins. L'effet de diviser une quantité
donnée de flux magnétique le long de deux trajets de flux comme à la place de
celui-ci en passant le long de seulement une zone de flux peut être vu par
l'examen de la force de maintien sur l'armature 54 par rapport à la
force de maintien sur l'armature 26 de la Fig.1. Comme déjà noté la densité de flux magnétique
le long du trajet 56 sera la moitié de celle le long trajet de flux 32
et donc le total FT54 de la force de maintien peut être déterminé
comme suit :
![]()
On
voit donc que la division de la même quantité de flux magnétique le long de
deux trajets de flux, plutôt que le long d'un trajet de flux magnétique réduit l'exploitation
ou de la force de couplage sur une armature à un quart plutôt que la moitié
comme on aurait pu s'y attendre. Cette prise de participation ou de la force de
couplage magnétique différentiel inattendu, résultant de multiples chemins de
flux, peut fournir des propriétés avantageuses en linéaire, alternatif et
dispositifs de mouvement rotatifs.
En
se référant maintenant à la Fig.3 et la Fig.4, le comportement de
plusieurs sources de flux magnétique disposé en parallèle et série est décrit par
rapport à une seule source de flux.
Lorsque les sources de flux ou de flux magnétiques identiques produire
membres 70 et 72 sont positionnées en parallèle, comme illustré sur la Fig.3
avec des pièces polaires 74 et 76 positionnée de façon adjacente aux
pôles de celui-ci pour fournir un trajet de flux à travers l'armature 78,
la densité de flux B à travers l'armature 78 est double de ce que
la densité de flux serait si un seul membre de la production de flux magnétique
étaient présents. Cependant,
l'intensité du champ H, résultant des deux éléments 70 et 72 reste
inchangée. Ce résultat est vrai que des
membres 70 et 72 sont les deux aimants permanents, sont les deux
électro-aimants, ou sont une combinaison d'un aimant permanent et un
électro-aimant. D'autre part, les
propriétés résultant de membres magnétiques de flux de production 80 et 82 disposées
pôle à pôle en série entre des pièces polaires 84 et 86, avec l'armature
88, comme représenté sur la Fig.4, va varier en fonction de la
nature de l'membres 80 et 82.
Dans
un premier cas, si les deux éléments 80 et 82 sont des aimants
permanents, l'intensité de champ magnétique H obtenu à partir de deux
aimants permanents sera le double de celui d'un aimant permanent et la densité
de flux B à travers l'armature 88 sera le même que le flux
densité serait si seulement un élément de type à aimants permanents étaient
présents.
Dans
un second cas, si les deux membres 80 et 82 sont des électroaimants,
l'intensité du champ H est doublé et la densité de flux B augmente
en fonction du B / H courbe ou de la relation de la pièce polaire 84,
86 et 88 induit matériaux.
Dans
un troisième cas, si le membre de 80 est un aimant permanent et membre 82
est un électro-aimant, l'intensité du champ H double encore, mais,
depuis l'aimant permanent est proche de la saturation de la densité de flux Br
la densité de flux ne peut être augmenté de Br à Bmax de
l'aimant permanent. Au point où organe
de type électro-aimant 82 contacts membre de type à aimant permanent 80
le flux de l'élément de type électro-aimant 82 couple avec le flux
de l'élément permanent de type à aimant 82 jusqu'à ce que la densité de
flux à travers l'élément du type à aimant permanent 80 atteint Bmax. À ce moment-flux supplémentaire de type à
électro-aimant 82 élément ne contribue pas à la densité de flux le long
de la trajectoire de flux à moins d'un trajet de dérivation autour de l'élément
du type à aimant permanent est prévu. L'utilisation de ces chemins de
dérivation sera décrite ci-dessous.

Le
contrôle de l'écoulement du flux le long de l'un et de plusieurs trajets de
flux est le mieux décrit en référence à la Figs.5-9. Dans la Fig.5 et la Fig.6 un
dispositif à aimant permanent 90 comprenant un aimant permanent 92 ayant
des pièces polaires 94 et 96 positionné de manière adjacente à son faces
polaires, et un induit 98 remplissant un trajet à faible réluctance 104
de pôle à pôle est représenté. Des
bobines de commande 100, 102 sont positionnées le long du trajet 104 Lorsque
bobines de commande 100, 102 ne sont pas sous tension, le flux
magnétique de l'aimant permanent 92 suit le chemin 104, comme
illustré et de l'armature 98 est maintenue en place contre les pièces
polaires 94, 96 en raison de la résultante forces de couplage
magnétique. Cependant, si les bobines 100,
102 sont excités pour fournir un flux magnétique égale mais opposée à celle
de l'aimant permanent 92, il en résulte que le flux magnétique de
l'aimant permanent 92 est bloqué et aucun flux magnétique traverse le
chemin qui inclut l'armature 98 et donc pas de forces de couplage
magnétiques agissent sur l'armature 98 qui lui permet de tomber comme le
montre la Fig.6. Le dispositif à
aimant permanent 90 est utile, bien que, comme on le verra ci-dessous,
il est plus avantageux de prévoir plusieurs chemins de flux plutôt qu'un.
À cet égard, la Fig.7 un
dispositif d'aimant permanent 110 comprend un aimant permanent 112 ayant
des pièces polaires 114, 116 positionné de manière adjacente aux faces
polaires de celui-ci, avec des armatures 118, 120 remplissant deux
trajets à faible réluctance 130 132, d'un pôle à de ceux-ci. Contrôle bobines 122, 124 sont
positionnés le long du chemin 130 et de contrôle des bobines 126, 128
sont positionnés le long du chemin 132. Les deux voies prévues sont supposés avoir la même
réticence. En l'absence de bobines sous
tension, le flux magnétique de l'aimant permanent 112 divise également
le long du trajet de flux 130 et 132 chemin de flux de telle sorte que
les deux armatures 118, 120 sont soumis à une force de couplage
magnétique, qui les maintient en place contre les pièces polaires 114, 116.
Si
les bobines 122, 124 sont mis sous tension pour fournir un flux
magnétique égal mais opposé au flux magnétique qui se déplace le long du trajet
de flux 130 de l'aimant permanent 112 en l'absence de bobines
sont alimentées, il en résulte que le flux magnétique de l'aimant permanent 112
est bloqué et aucun flux magnétique traverse le chemin qui inclut
l'armature 118 et par conséquent aucune force de couplage magnétique agissant
sur l'armature 118 qui lui permet de tomber comme le montre la Fig.8. En outre, le chemin de déplacement du flux
magnétique 132 sera le double de celui de pas lorsque les bobines sont
excitées et par conséquent la force de couplage magnétique sur l'armature 120
sera d'environ quatre (4) fois plus élevé que lorsqu'il n'y a pas de
bobines sont alimentées. En mettant sous
tension des bobines 126, 128 d'une manière opposée à un résultat
similaire pourrait être obtenu que par exemple l'armature 120 se trouvent
à une distance tomber et de sorte que la force de couplage magnétique induit
sur 118 serait augmenté.
Si
les bobines 122, 124 sont mis sous tension pour fournir un flux
magnétique égale à et facilitant le flux magnétique qui se déplace le long du trajet
de flux 130 en l'absence de bobines sont alimentées, il en résulte que
le couple des bobines de commande complètement avec le flux magnétique de
l'aimant permanent 112 et pas flux magnétique traverse le chemin qui
inclut l'armature 120 et par conséquent aucune force de couplage
magnétique agissant sur l'armature 120 qui lui permet de tomber comme le
montre la Fig.9. En outre, le
chemin de déplacement du flux magnétique 130 sera le double de celui de
pas lorsque les bobines sont excitées et par conséquent la force de couplage
magnétique induit sur 118 sera d'environ quatre (4) fois plus élevé que
lorsqu'il n'y a pas de bobines sont excitées.
En mettant sous tension des bobines 126, 128 d'une manière
facilitant le même résultat serait obtenu de telle sorte que l'armature 118 tomberait
et la force de couplage magnétique induit sur 120 serait augmenté.
Sur
la base de ce qui précède, on voit que la force de couplage magnétique complet
disponible à partir de l'aimant permanent 112, peut être commuté d'une voie
à une autre voie par l'application d'une moitié de la puissance, il faudrait
une bobine seule pour produire la même magnétique de flux le long d'une
trajectoire. La possibilité de passer de
la force de couplage magnétique complet facilement d'un chemin à l'autre,
permet alternatif efficace, linéaire, et un mouvement de rotation et de
conversion de puissance à atteindre.
L'appareil de base utilisée pour
réaliser des aimants permanents division de flux et de contrôler une telle
division de flux à un aimant permanent est défini dans la présente comme une
" composante de contrôle à un aimant permanent ", diverses
configurations dont sont fournis à titre d'exemple uniquement et non par voie
de prescription, dans Figs.10A-10F.
Fig.10A représente un élément de contrôle à un aimant permanent 150
dans quel pôle pièces 152 et 154 sont positionnés adjacents aux
visages pôle d'un aimant permanent 156 pour fournir deux chemins d'accès
de flux magnétique qui s'étend de côtés opposés d'un aimant permanent. Bobines
de commande 158 sont positionnés le long de chaque chemin.
Fig.10B représente un élément de contrôle à un
aimant permanent 160 dans quel pôle pièces 162 et 164 sont
positionnées contre les parois du pôle de l'aimant permanent 166 pour
fournir deux espacées, chemins adjacents de flux magnétique qui s'étend du même
côté de l'aimant permanent 166.
Bobines de commande 168 sont positionnés le long de chaque
chemin.
Fig.10C représente un élément de contrôle à un
aimant permanent 170 dans quelles pièces polaires 172 et 174 sont
configurés afin d'être positionné adjacentes les visages de pôle de l'aimant
permanent 176 afin de fournir quatre chemins d'accès de flux, chaque
flux chemin s'étendant dans une direction respective de 176 à un aimant
permanent. Bobines de contrôle 178 sont
également positionnés sur chaque voie.
Fig.10D représente une autre configuration de
quatre-chemin d'accès d'un composant de contrôle permanent magnet 180 dans
quel pôle pièces 182, 184 sont configurés et placée pour fournir quatre
chemins de flux d'un aimant permanent 186, avec une paire de chemins
adjacentes, espacés de flux qui s'étend de chaque côté de l'aimant permanent 186. Bobines de commande 188 sont
positionnés le long de chaque chemin.
Fig.10E représente une autre configuration de
quatre-chemin d'accès d'un composant de contrôle à un aimant permanent 190 dans
lequel tous les chemins de quatre flux formés par les pièces polaires 192,
194 s'étendent d'un côté de l'aimant permanent 196. Encore une fois, contrôle bobines 198 sont
positionnés le long de chaque chemin d'accès de flux.
Fig.10F encore représente une configuration de
quatre-chemin d'accès d'un composant de contrôle à un aimant permanent 200 dans
quelles pièces polaires, 202, 204 s'étendent d'un côté de l'aimant
permanent 206, avec pièce polaire 202 définissant quatre chemins
de flux et avec pôle pièce 204, y compris une voie de retour
continue. Bobines de commande 208
sont positionnés le long de chaque chemin d'accès de la pièce polaire 202.
Nombreuses autres variantes sont
possibles.
En
conséquence, on voit qu'une variété de configurations différentes des
composants du système à un aimant permanent est possible, conformément à la
présente invention. Incluent les considérations importantes pour la division du
flux d'un aimant permanent dans ces composants de contrôle à un aimant
permanent, qui s'étend de chaque pièce polaire à, ou au-delà, le périmètre
extérieur de la face de pôle de l'aimant permanent dans chaque région où un
chemin d'accès de flux est destiné et en assurant que le visage de pôle de
l'aimant permanent croise chacun des chemins de flux. Il n'est pas nécessaire pour chaque pôle
d'inclure le même nombre de portions de chemin d'accès qui s'étend au-delà du
périmètre de la face de pôle respectifs à un aimant permanent comme il est
indiqué en ce qui concerne la composante de contrôle à un aimant permanent 200. Bien que les deux bobines sont affichés le
long de chacun des chemins de flux en Figs.10A-10E, il ressort de la
composante 200 en bobine de Fig.10F que l'on contrôle positionné
le long d'un chemin d'accès du flux de contrôle est généralement suffisante aux
fins de la présente invention . En outre, bien que dans les configurations
illustrées que chaque pièce polaire est positionné pour communiquer avec un
visage respectifs de pôle de l'aimant permanent, un petit espace entre une
pièce polaire et son visage de pôle adjacent à un aimant permanent pourrait
être fourni, notamment dans les applications où se produira un mouvement relatif
entre la pièce polaire de sujet et de l'aimant permanent.
Dans sa forme la plus simple, un
composant de contrôle à un aimant permanent avec deux chemins exige seulement
une bobine de contrôle placée le long d'un des chemins de contrôle pour permettre
le flux magnétique d'un aimant permanent pour commuter entre les deux chemins .
En particulier, une vue de côté d'un tel composant avec deux chemins 210 est
montrée dans Fig.10G et comprend un aimant permanent 211 pole
pièces 212 et 213 et contrôler la bobine 214, qui peut être relié
à un circuit de contrôle approprié. En alternant
contrôle énergisante bobine 214 de manière défavorable et une manière
d'aider aide que le flux magnétique de l'aimant permanent peut être commuté
entre le chemin d'accès y compris armature 215 et le chemin d'accès y
compris armature 216. Contrôle
bobine 214 est mise sous tension provoque de façon adverse le flux
magnétique va traverser le chemin y compris armature 215 et quand la
bobine du contrôle 214 est excitée dans un aidant façon le flux
magnétique va traverser le chemin y compris armature 216. Contrôle
bobine 214 pourrait également être placé à n'importe lequel des postes 217,
218 ou 219 pour atteindre le basculement de chemin d'accès du
flux.
En outre, dans les deux bobines
incarnation montrée dans Fig.10H contrôle bobine 217 est
ajoutée. Dans un tel dispositif, flux de
commutation peut être réalisé en énergisant simultanément la bobine 214 de
contrôle dans un flux à l'aide de manière et contrôler les bobines 217 un
flux s'opposer de manière et en ensuite simultanément inversant la mise sous
tension des bobines contrôle respectif 214 and 217.
Il est fait référence à Figs.11A-11F
qui représentent des dispositifs similaires à celui de Figs.5-6 sauf
qu'un by-pass, formé d'un matériau magnétique, est prévu dans chaque cas. Dans le dispositif 220 de Figs.11A-11C une
dérivation 222 est prévue à partir de la pièce polaire 224 à 226 et
la pièce polaire se trouve entre l'aimant permanent 228 et des bobines
de commande 230, 232, 234 de l'armature située au voisinage des
extrémités des pièces polaires 224, 226. dans Fig.11A sans
alimentation de la bobine, aimant flux composants 236 et 237 comme
indiqué voyage.
Lorsque les bobines 230 et
232 sont alimentés dans une aide ou l'adjonction manière que dans Fig.11b,
le résultat est à aimants permanents composants magnétiques de flux de
déplacement 236 et 237 comme représenté, et à la composante de flux
magnétique supplémentaire 238 à partir de bobines 230 et 232 également
comme voyager représenté. Ainsi, dans le
dispositif 220 exciter les bobines dans un des résultats, de quelque
manière aidant à une force de couplage magnétique accrue sur l'armature 234.
En Fig.11C bobines 230,
232 sont excités de manière adverse supérieure qui se traduit par des
composants de flux magnétique permanent 236 et 237 voyageant comme
indiqué et excès flux magnétique composant 238 voyageant comme
indiqué. Ainsi, dans l'appareil 220 énergisant
les bobines dans un résultats de manière excédant adverse en force
d'accouplement magnétique sur armature 234, quoique plus petit que les
favoriser le plus de cas.
Dans
dispositiv 240 de Figs.11D-11F une dérivation 242 est
assurée entre la pièce polaire 244 et la pièce polaire 246 mais
est situé sur un côté opposé de l'aimant permanent 248 par rapport aux
bobines de contrôle 250, 252 et l'armature 254. Aimant permanent flux composants 256 et 257 sont illustrés pour
aucune excitation bobine dans Fig.11D.
En Fig.11E les chemins d'accès de flux magnétique 258, de
bobine de composants 256 et 257, ainsi qu'excès du flux aimant permanent
sont indiqués quand les bobines 250, 252 sont excités d'une manière
supérieure aider aide.
Dans Fig.11F le chemin
d'accès de chaque composant de flux magnétique, 256, 257 et 258 est
montré quand les bobines 230, 232 sont excités de manière opposée
excédant.
Figs.12A-12E dépeignent un dispositif 270 similaire
à celle montrée dans la Figs.7-9 sauf que contournements 272 et 274 sont
offerts de la pièce polaire 276 à pièce polaire 278. Contournement 272 est située entre à
un aimant permanent 280 et contrôle bobines 282, 284 et
contournement 274 est située entreà un aimant permanent 280 et contrôle bobines 286, 288. Armatures 290 et 292 sont également
fournis. Quand aucun bobines ne sont des
composants de flux magnétique aimanté à excitation 294, 296, 298 et 300 de
voyage comme le montre dans Fig.12A.
Si les bobines 282, 284 sont
excités dans un adverse manière aimant permanent flux composants 295, 297,
et 299 voyage comme indiqué, avec aucun composant de flux qui traversent le
chemin d'accès qui comprend l'armature 290 et donc aucune force de
couplage magnétique agissant à ce sujet.
Cela devrait être le cas pour bobines 282, 284 sont excités au
niveau où le flux magnétique de bobines bloque juste, mais ne dépasse pas, le
composant de flux magnétique 294 (Fig.12A) à un aimant permanent 280. Toutefois, si les bobines 282, 284 sont
excités dans manière excédant opposée qu'est un
bobine excès composant de flux magnétique 301 produites qui
parcourt un chemin d'accès y compris induit 290 et contourner 272 résultats
comme sur la Fig.12C.
Bobines 286, 288 peuvent
être alimentés de manière aider aide telle que tous les flux magnétique de
l'aimant permanent se déplace le long du chemin qui comprend l'armature 292 comme
indiqué dans Fig.12D. Si les
bobines 286, 288 sont excités dépassant le niveau de Fig.12D,
puis le composant de flux magnétique excessif 304 traverse le chemin
d'accès qui comprend l'armature 292 et contournement 274 comme
indiqué dans Fig.12E, ce qui augmente la force d'accouplement magnétique
sur armature 292 par rapport à Fig.12D. L'avantage d'intégrer ce contourne en aimant
permanent contrôle composants dans certaines applications apparaîtront
ci-dessous.
Mouvement Alternatif
Comme mentionné ci-dessus, le
contrôle de la trajectoire de flux magnétique d'un aimant permanent peut être
utile dans une variété d'applications telles que la réalisation de mouvement
alternatif. A cet égard, si le
dispositif 110 de Figs.7-9 est modifié de telle sorte que les
armatures 118 et 120 sont fixés à un arbre coulissant 320, comme
indiqué dans Figs.13A-13C, et si la distance entre les armatures est
supérieure à la fin à la longueur de la fin de pièces polaires 114, 116,
un mouvement linéaire limité dans deux directions (gauche et à droite dans Figs.13A-13C),
et le mouvement de va et vient donc linéaire, peut être réalisé par le
chronométrée, une autre livraison de signaux électriques pour commander des
bobines 122 , 124 et commande des bobines 126, 128. A titre
d'exemple, Fig.13A représente la position de l'arbre armatures reliées 118,
120 lorsque les bobines 122, 124 sont excités de manière opposée
pour bloquer le flux de l'aimant permanent 112 de telle sorte que toutes
magnétique flux traverse le chemin 132 et comme représenté de telle
sorte que la force de couplage magnétique résultant d'actes à la gauche comme
indiqué par la flèche 322.
Comme
le montre la Fig.13B lorsque les bobines 122, 124 sont hors
tension le flux magnétique de l'aimant permanent 112 peut à nouveau se
déplacer le long du trajet à travers l'armature 130 118. Toutefois, en raison de l'entrefer entre
l'armature 324 et 118 des pièces polaires 114, 116 de la
réluctance le long du chemin 130 sera beaucoup plus grande que la
réluctance le long du trajet 132 en conséquence, la quantité de flux
magnétique qui circule le long du chemin 130 sera inférieure à la
quantité de flux magnétique qui circule le long du trajet 132 de telle
sorte que la force de couplage magnétique induit sur 118 agir pour le
droit sera nettement inférieure à la force de couplage magnétique sur
l'armature 120 agissant à la gauche comme indiqué par les flèches 326
et 328, qui sont dimensionnés flèches pour représenter la force de la force
directionnelle respective.
Fig.13C représente la position de l'arbre 118, les
armatures 120 connectés après les bobines 126, 128 sont mis sous
tension de façon à s'opposer au flux de l'aimant permanent 112 de telle
sorte que tout le flux traverse le chemin 130 et la force de couplage
magnétique résultant sur l'armature 118, représentée par flèche 330,
déplace l'arbre 10 armatures connectés 118, 120 à la droite.
Contrôle
de bobines 122, 124 et 126, 128 peut aussi être alimenté à la manière
d'aide apportée à flux pour obtenir le même résultat. Dans un tel dispositif, Fig.13A représenterait
bobines 126, 128 sous tension à l'aide de flux magnétique le long du
chemin 132, Fig.13B serait à nouveau ne représentent bobines sous
tension, et Fig.13C représenterait bobines 122, 124 sous tension
à l'aide de flux magnétique le long du chemin 130.
Ainsi,
en alternance énergisant et hors tension de bobines de commande 122, 124 et
126, 128 un mouvement alternatif linéaire de l'arbre armatures connectés 118,
120 peut être réalisé. En outre, un
tel mouvement de va et vient peut être obtenue par l'excitation des bobines en
soit de manière opposée ou en aidant. La
force de couplage magnétique exercée sur une armature donné lorsque 20 les
bobines de commande sont activés pour mettre en place l'ensemble de flux
magnétique le long d'un chemin unique qui comprend ce que l'armature est
sensiblement supérieure à la force de couplage magnétique qui serait exercée
sur cette armature par une excitation identique de l'bobines de commande en
l'absence de l'aimant permanent.
Cela
est démontré en se référant à la Fig.14 qui représente un dispositif à
mouvement alternatif 340, dans lequel seules des bobines ou
électro-aimants sont utilisées. Comme
armatures représentées 342 et 344 sont reliés par un arbre 346,
et chaque armature 342, 344 comporte un pôle en forme de U trajet pièce
respective 348, 350 dont les pièces de chemin de pôles sont reliés
mécaniquement par un matériau non-magnétique 352. Chaque pièce de trajet des pôles 348 et
350 a des bobines de commande respectives 354, 356 et 358, 360 disposés
le long de leur. En comparaison avec le
dispositif de Figs.13A-13C, si des bobines 358, 360 du dispositif
340 sont sous tension pour provoquer l'écoulement du flux magnétique
dans les deux sens, dans le sens horaire ou anti-horaire, le long du chemin 362,
la quantité d'énergie électrique qui serait nécessaire pour pour obtenir la
même force de couplage magnétique induit sur 344 réalisés comme
ci-dessus sur l'armature 120 dans Fig.13A serait double de celle
délivrée aux bobines 122, 124 ou 126, 128 dans Fig.13A. Il est donc démontré, qu'en contrôlant ou de
changer le débit du flux magnétique d'un aimant permanent entre au moins deux
résultats chemins différents dans de plus grandes forces de couplage par unité
d'intrant énergie électrique, et donc que le contrôle ou la commutation
permettront à plus de travail pour être atteint par unité d'intrant énergie
électrique.
Comme
décrit ci-dessus, si une bobine est excitée au-delà du point où le flux
magnétique produit par la bobine d'aider la quantité de flux de l'aimant
permanent qui est soit opposée ou assistée par ordinateur, le flux magnétique
supplémentaire a besoin d'un chemin à faible réluctance entre les pôles de la
bobine qui produit l'excès de flux magnétique.
Si un chemin d'accès complet à faible réticence n'est pas fourni pour
l'excédent de flux magnétique, il ya peu de potentiel pour profiter de l'excès
de flux magnétique en termes de production des forces de couplage magnétiques
supplémentaires. Le chemin de l'excédent
de flux ne peut pas se faire par un élément d'aimant permanent. Dans les ensembles qui comprennent une armature sur chaque chemin,
l'armature fournira le chemin à faible réluctance nécessaire.
En se référant à la Fig.15,
diverses composantes du flux magnétique dans le dispositif 110 (Figs.7-9)
sont représentés par des chiffres 380, 382, et 384 dans le cas où les
bobines 122, 124 sont excités à s'opposer au flux magnétique de l'aimant
permanent 112, en une quantité qui dépasse le niveau de flux magnétique
à aimant permanent 112 qui provoquerait à s'écouler à travers l'armature
118 lorsque aucun bobines sont alimentées. Fig.15 est également représentatif du
cas où les bobines 126, 128 sont excités à l'aide du flux magnétique de
l'aimant permanent 112 en une quantité qui dépasse le niveau de flux
magnétique à aimant permanent 112 qui provoquerait à s'écouler à travers
l'armature 118 en l'absence de bobines sont sous tension. En particulier, le composant de flux magnétique 380
représente le flux magnétique de l'aimant permanent 112 qui s'écoule
normalement à travers le chemin d'accès incluant l'armature 120 ;
composant de flux magnétique 382 représente le flux magnétique de
l'aimant permanent 112 qui est dévié par le champ opposé de bobines 122,
124 de manière à traverser la trajectoire, qui comprend l'armature 120 ;
et le composant de flux magnétique 384 représente le flux magnétique
produit par les bobines 122, 124 qui est en excès du flux magnétique
dévié 382. Comme on le voit,
l'excédent de flux magnétique 384 produit par les bobines 122, 124 traverse
le chemin qui inclut l'armature 120 et contourne permanent aimant 112
de manière à traverser également le chemin qui comprend armature 118 ainsi,
le flux magnétique en excès produite par les bobines 122, 124 ajoute au
flux de l'aimant permanent qui traverse le chemin qui inclut l'armature 120,
augmentant ainsi la force de couplage magnétique sur l'armature 120,
tout en fournissant en même temps une force de couplage magnétique induit sur 118.
Dans
un dispositif alternatif où armatures 118 et 120 sont reliés par un
arbre 320 comme indiqué dans Figs.13A-13C et de nouveau en Fig.16A,
l'excès de flux magnétique 384 va augmenter la force de couplage
magnétique 390 sur l'armature 120 agissant sur la gauche. Cependant, parce que l'excédent de flux 384
traverse également le chemin qui comprend armature 118, l'excédent
de flux magnétique 384 se traduit également par une force de couplage magnétique
392 sur l'armature 118 qui agit pour le droit. Même si l'excès de flux magnétique 384 traversant
le chemin qui comprend une armature 118 a une polarité opposée à celle
qui traverserait le chemin en raison d'aimant permanent 112, la force de
couplage magnétique sur l'armature 118 agit encore sur la droite car
armature 118 n'est pas sensible à la polarité , c'est-à-armature 118 est
attirée quelle que soit la direction du flux magnétique traversant la
trajectoire. L'effet global est que la
force résultante qui est la différence entre la force 390 et la force 392
va agir sur les armatures en forme d'arbre relié 118, 120 Toutefois,
si armatures 118 et 120 ont été formés par des aimants permanents ayant
des polarités comme indiqué en haut et fond de ces armatures, la force agissant
sur chaque armature serait dans la même direction et donc l'additif.
A cet égard, il est fait
référence à Fig.16B dans lequel un dispositif de chemin deux 371 ayant
quatre bobines de commande 373, 375, 377 et 379 est représenté avec les
armatures illustrées étant formés par des aimants permanents 381 et 383 ayant
des polarités comme illustré. En
l'absence de bobines sous tension les deux armatures d'aimants permanents 381
et 383 sont attirés par les extrémités des pièces polaires 385 et 387 de
bobines 373, 375 excités de manière opposée et des bobines 377, 379 sous
tension de manière aidant, la force d'attraction sur l'aimant permanent induit 383
sera généralement augmenter et la force d'attraction sur l'armature de
l'aimant permanent 381 seront généralement diminuer.
Cela
est démontré en se référant au graphique de la Fig.16C qui représente un
graphique du courant circulant dans les bobines de commande sur l'axe des x
vers le flux magnétique en gauss sur l'axe des y à la ligne 389 qui
représente le flux le long du côté de l'aide apportée de dispositif 371 et
la ligne 391 qui représente le flux le long du côté opposé du dispositif
371 comme le montre, le flux magnétique sur le côté opposé de la bobine
diminue à mesure que la bobine courant augmente et passe par zéro au point 393
Après le point 393, inverser le flux magnétique commence à produire
et se traduirait par une force de répulsion sur l'aimant permanent armature 381
dans certaines applications, en particulier celles où les armatures et les
rotors à aimant permanent ne sont pas utilisés, il est essentiel d'identifier
le point 393 de sorte que le flux magnétique inverse n'est pas
produit.
À cet égard, il est fait
référence à Fig.16D et Fig.16E, dans lequel on utilise des commutateurs
à effet Hall 401 et 403 est faite pour permettre le contrôle du courant
d'excitation de la bobine dans des situations où il est souhaitable d'empêcher
le flux magnétique inverse. Comme on le
voit, contourne petit 405 et 407 sont fournies avec des commutateurs à
effet Hall 401 et 403 positionnées dans les espaces libres sur les
commutateurs étant reliés au circuit de commande 409. Comme le déplacement du flux le long du
chemin de dérivation tombe à zéro, le commutateur à effet Hall peut être
utilisé pour empêcher la mise sous tension des bobines de commande de sorte
qu'aucun flux inverse est créée.
Un autre mode de réalisation d'un dispositif
400 qui donnerait un mouvement alternatif est représenté sur la Figs.17A-17D,
dans lequel un composant de commande de l'aimant permanent 402 ayant
deux chemins de flux peut est fourni. Une première
pièce polaire 404, a deux espacées parties de chemin adjacentes 406
et 408 s'étendant au-delà du périmètre de la face polaire de l'aimant
permanent 410, et une deuxième pièce polaire 412 ne comporte
qu'une seule partie continue 414 qui s'étend au-delà du périmètre de la
surface de pôle de l'aimant permanent 410, chaque partie de trajet 406
et 408 de la pièce polaire 404 est sensiblement aligné avec au moins
une partie de la portion 414 de la pièce polaire 412 de contrôle
bobine 416 est positionné le long de la pièce polaire portion de voie 406
et la bobine de commande 418 est positionnée le long de la pièce
polaire partie 408. Une armature 420
est positionné dans la région entre les parties de chemin de pièce polaire 404,
406 et pôle partie de pièce 414 et est libre de glisser de gauche à
droite, comme indiqué par les flèches 422 et 424.
Une vue de face
de dispositif composant 400 sans bobines sous tension et de l'armature 420
à un point médian représente flux s'écoulant du visage pôle nord de
l'aimant permanent 410, à travers chacune des pièces polaires portions
de voie 406 et 408, par le biais induit 420, et le retour à le
visage pôle sud par pôle partie de pièce 414. Ainsi, le flux magnétique divise également
par deux voies. Si la bobine 416 est
excitée d'une manière aidé, ou si la bobine 418 est excitée de manière
opposée, la totalité ou la majorité du flux magnétique des aimants permanents
peut être amené à s'écouler à travers la partie de la pièce polaire 406 de
sorte qu'une force de couplage magnétique résultant sur l'armature 420 l'amène
à se déplacer vers la gauche, comme indiqué dans Fig.17C.
De même, si la
bobine de commande 416 est excité de manière opposée, ou si la bobine de
commande 418 est excitée d'une manière facilitant, la totalité ou la majorité
du flux de l'aimant permanent peut être amené à s'écouler à travers la partie
de trajectoire de la pièce polaire 408 de telle sorte qu'une résultante
magnétique force de couplage sur l'armature 420 provoque son déplacement
vers la droite comme le montre la Fig.17D. En conséquence, par des bobines alternativement mise sous tension ou
hors tension 416 et 418 un mouvement alternatif de l'armature 420 peut
être atteint.
Mouvement Linéaire
En
se référant maintenant à Figs.18A-18E, le mouvement linéaire en
conformité avec la présente invention est décrit. En particulier, un élément de commande à
aimant permanent 440 comprenant un aimant permanent 442 à une
pièce polaire 444 positionnée contre c'est le visage pôle nord et une
pièce polaire 446 positionnée contre il est sud face polaire est
représenté dans une vue éclatée en Fig.18A et assemblé à la Fig.18B.
La
pièce polaire 444 comporte cinq portions de voie 448A-448F qui
s'étendent au-delà du bord de la surface de pôle nord de l'aimant permanent 442
sur un côté de celui-ci et dans des positions respectives le long de sa
longueur, et il a portion de voie 448A-448F chacun avec une bobine de
commande 450A-450E positionné autour d'eux. La pièce polaire 446 comporte une
partie 452 s'étendant au-delà du bord de la face du pôle sud de l'aimant
permanent 442 à l'un des côtés de celui-ci, et cette partie 452 s'étend
sur toute la longueur de l'aimant permanent 442. Un certain nombre d'armatures 454 définissent
un trajet de un mouvement relatif entre le composant de commande de l'aimant
permanent 440 et 454 de ces armatures, et en fournissant l'excitation
synchronisée des bobines de commande donnés 450A-450E tel mouvement
relatif peut être obtenu.

La séquence de vues secondaires décrits dans
Figs.18C-18E illustrent un tel mouvement relatif,
avec des bobines 450A, 450C et 450E étant
excités de manière opposée dans Fig.18C simultanément,
avec des bobines 450A 450D et étant
alimenté en même temps d'une manière opposée dans Fig.18D et
avec des bobines 450B et 450D étant
excités simultanément de manière opposée dans Fig.18E.
Dans Fig.18C, le flux magnétique ne
s'écoule le long de portions de trajet 448b et 448c de la pièce polaire 444,
provoquant des forces de couplage magnétiques résultants représentés par les
flèches 456, 458 qui agissent pour déplacer l'organe de commande de
l'aimant permanent 440 vers la gauche, en supposant armatures 454 sont
fixées. De même, en raison du
calendrier de suite retombée de la bobine forces magnétiques qui en résultent
représenté par les flèches 460, 462 en Fig.18D et flèches 464,
466 en Fig.18E agir pour continuer le mouvement de l'organe de
commande à aimant permanent 440 vers la gauche. Ainsi, si le composant de commande de
l'aimant permanent 440 ont été fixés à un dispositif ou une structure,
le mouvement contrôlé de l'appareil ou de la structure le long de la
trajectoire définie par les armatures 454 pourrait être réalisé. A l'inverse, si le composant de commande de
l'aimant permanent 440 et ont été fixées les armatures 454 étaient
situés sur un dispositif ou une structure, un mouvement contrôlé de l'appareil
ou de la structure pourrait également être obtenue. Il est également reconnu
que facilement en faisant varier la séquence de mise sous tension de la bobine
de synchronisation et un mouvement relatif dans le sens inverse peut être
réalisé. En outre, si l'aimant permanent
a été beignet en forme et les armatures ont été disposés dans un schéma
circulaire, un mouvement de rotation serait également possible.
Mouvement Rotatif
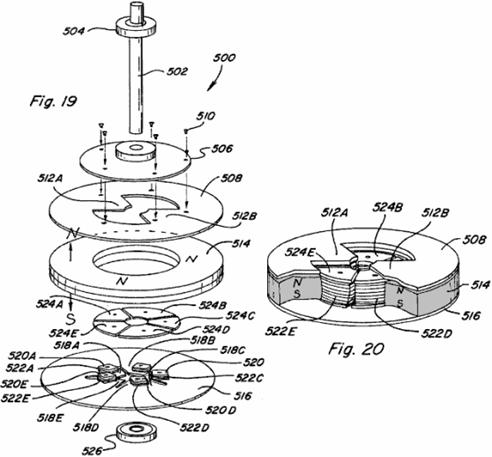
Un
mode de réalisation d'un dispositif à mouvement rotatif ou un moteur 500 qui
incorpore différents aspects de contrôle de flux aimant permanent de la
présente invention est représenté sur la vue éclatée de la Fig.19 et
dans la vue partielle de la Fig.20 assemblé. Moteur 500 comprend un ensemble de
rotor qui comprend un arbre 502 et le palier supérieur associé 504,
un élément de disque non-magnétique 506 monté pour tourner avec l'arbre 502,
et un pôle de rotor pièce 508 qui est monté à rotation avec l'élément de
disque 506, par exemple par l'l'utilisation de vis 510 de la
pièce polaire du rotor 508. comprend une partie annulaire s'étendant
vers l'intérieur présentant deux parties magnétiques de trajet de flux 512A
et 512B. Ensemble de stator de
moteur 500 comprend un anneau ou une bague en forme de l'aimant
permanent 514 ayant une face polaire nord dirigé vers le haut en
position adjacente et à proximité immédiate des pôles de rotor pièce 508,
et une surface de pôle sud dirigé vers le bas en position adjacente et en
contact avec un stator pièce polaire 516 stator pôle pièce comprend une
partie en forme d'anneau ayant cinq saillie vers l'intérieur chemin parties 518A-518E. Chaque portion de voie comprend un poste
d'enroulement 520A-520E respectif s'étendant à partir de et ayant une
bobine de commande 522A-522F respectif enroulé sur elle. Stator pièce polaire fait face à 524A-524F
sont qui peut être positionné sur des postes de bobinage respectifs 518A-518B
et, comme le montre l'assemblage partiel de la Fig.20, sont sensiblement
alignés avec la surface supérieure de l'aimant permanent 514 de manière
à être qui peut être positionnés rotor adjacent chemin portions 512A et 512B
avec celle-ci quand elles sont alignées.
Chacun des postes de bobinage 518A-518E et de pièces polaires de
stator faces sont formées d'un matériau magnétique, et, bien que représenté
comme des pièces séparées, une intégrale, une pièce de stator peuvent être
formés avec des postes d'enroulement et similaires pièce polaire fait face
usinée sur elle. Palier inférieur 526 est également
représentée.
Figs.21A-21E illustrent des vues de dessus de l'assemblage partiel de Fig.20
à flux magnétique indiqué. Dans Fig.21A
voyage flux magnétique lorsque aucun des bobines 522A-522F sont
excités est représenté. Abstraction
faite de flux de fuite, du fait du chemin de faible réluctance fourni par rotor
pièce polaire portions de voie 512A et 512B, la majorité du flux
magnétique à partir de la surface de pôle nord de l'aimant permanent 514 va
se déplacer radialement vers l'intérieur le long d'une de ces parties de chemin
avant de passer vers le bas à travers l'ensemble de stator et retourner à la
face du pôle sud de l'aimant permanent 514. Il est à noter que pôle de rotor pièce 508
comprend deux parties de trajet et le pôle statorique pièce 516 comporte
cinq portions de trajet de telle sorte que le rotor pièce polaire portions de
voie 512A et 512B sera toujours biaisé par rapport à la pièce polaire de
stator fait face 524A-524F. Seule
la partie de la trajectoire de pièce polaire de rotor peut aligner directement
avec une face de la pièce polaire de stator à un instant donné. En excitant alternativement les bobines de
commande de chacun des chemins de pièces polaires de stator, un mouvement de
rotation du rotor peut être obtenue.
En particulier, en se référant à
Figs.21B-21D, une séquence d'excitation qui se traduit dans ce mouvement
de rotation est décrit. Dans Fig.21B,
bobines de commande 522A et 522C sont alimentés d'une manière flux
magnétique s'opposant permanent.
L'aimant permanent du flux magnétique se propageant le long du mât de
rotor pièce portion de voie 512A a tendance à traverser au stator pièce
polaire visage 524B provoquant une force de couplage magnétique indiqué
par la flèche 526. De même, le
flux de l'aimant permanent se déplaçant le long partie de trajet de pièce polaire
de rotor 512B tend à traverser à pôle statorique morceau visage 524D provoquant
une force de couplage magnétique indiqué par la flèche 528. Le résultat est la rotation de pôle de rotor
pièce 508 dans le sens des aiguilles d'une montre comme indiqué par la
flèche 530.
Se
référant à Fig.21C, juste après la partie de trajet de pièce polaire de
rotor 512B n'est plus aligné avec la pièce polaire du stator visage 524D,
522C bobine de commande est désactivé et la bobine de commande 522D est
alimenté de manière opposée de sorte que le flux de l'aimant permanent se
déplaçant le long rotor chemin de pièce polaire 512B a tendance à
traverser au stator pôle 524E pièce faciale résultant de la force de
couplage magnétique indiqué par la flèche 532 contrôle bobine 522A reste
sous tension de sorte qu'une force de couplage magnétique indiqué par la flèche
534 résultats. En conséquence, la
rotation dans le sens horaire d'un pôle de rotor pièce 508 se poursuit.

Dans
Fig.21D, juste après la partie de trajet de pièce polaire de rotor 512A
n'est plus aligné avec la pièce polaire de stator 524B de la face, 522A
de la bobine de commande est mis hors tension et le contrôle 522B de
la bobine est excitée dans un flux magnétique de l'aimant permanent opposé de
manière à ce que l'aimant permanent flux magnétique qui se propage le long du
mât rotor chemin de pièce 512A tend à traverser au stator pôle 524C morceau
de visage de sorte qu'une force de couplage magnétique indiqué par la flèche 536
résultats. Bobine de commande 522D
reste sous tension de sorte qu'une force de couplage magnétique indiqué par
la flèche 538 résultats, et la rotation des aiguilles d'une montre d'un
pôle de rotor pièce 508 se poursuit.
Comme
représenté sur la Fig.21E, juste après la partie de trajet de pièce
polaire de rotor 512B n'est plus aligné avec la pièce polaire de stator
visage 524F, bobine de commande 522D est désexcité et 522F de
la bobine de commande est alimenté en un flux magnétique de manière opposée de
l'aimant permanent de telle sorte que la l'aimant permanent du flux magnétique
se déplaçant le long de la trajectoire de la pièce de pôle de rotor 512B tend
à traverser au stator face de la pièce polaire 524A de sorte qu'une
force de couplage magnétique indiqué par la flèche 540 résultats. Contrôle bobine 522B reste sous
tension de sorte qu'une force de couplage magnétique indiqué par la flèche 542
résultats, et la rotation dans le sens horaire d'un pôle de rotor pièce 508
se poursuit.
Ainsi,
par une alternance de bobines de commande d'excitation et la désexcitation 522A-522F,
dans une séquence temporelle prédéterminée en fonction de la rotation de
l'ensemble de rotor, la poursuite du mouvement de rotation de la pièce de pôle
de rotor 508 peut être réalisée.
Un tel système sous tension / mise hors tension peut être réalisé en
utilisant un circuit commun dans l'art, tel que le circuit de commande décrit
dans le brevet US de la demanderesse. Nos. 5.463.263 et 5.455.474, ainsi que
plusieurs des configurations de circuits décrits ci-dessous.
En se référant maintenant à la Fig.22,
une vue assemblée du moteur rotatif 500 est représenté comprenant un
boîtier ou un couvercle formé par un élément de logement supérieur 544 et
un élément de boîtier inférieur 546, avec des parties de chaque élément
de boîtier coupée pour exposer la structure du moteur décrite ci-dessus. Il est
reconnu que ces éléments de boîtier 544 et 546 doivent être construits à
partir d'un matériau non magnétique, de même que l'arbre du moteur 502 et
des paliers 504, 526 doivent être construits à partir d'un matériau non
magnétique.
Dans
un autre mode de réalisation, un dispositif à mouvement rotatif ou moteur 580
conformément à la présente invention est représenté dans une vue en
perspective éclatée à la Fig.23 et dans une vue en perspective assemblée
de la Fig.24. Deux aimants
permanents espacés 582 et 584 sont positionnés entre les pièces polaires
de stator 586 et 588 du stator 586 pièce polaire comprend deux
portions de voie 590A et 590B s'étendant à partir des aimants permanents
582, 584 dans des directions opposées.
De même, le stator pièce polaire 588 comprend deux portions de
voie 592A et 592B s'étendant à partir d'aimants permanents 582, 584 dans
des directions opposées et qui peut être aligné avec pièces polaires de stator
portions de voie 590A et 590B.
Contrôle de bobines 594, 596, 598, et 600 sont respectivement
positionnés le long d'une portion de voie de pièce polaire de stator comme
indiqué. Un arbre non magnétique 602 comprend
une paire d'appariement des éléments de rotor allongées 604 et 606,
formée d'un matériau magnétique, montés à des emplacements espacés sur l'arbre
et est fixé à un angle par rapport à l'autre, l'arbre 602 qui passe
entre les aimants permanents espacés 582 et 584. Deux éléments de capuchon d'extrémité 608
et 610, fabriqués à partir de matériau non-magnétique, sont fixés aux
extrémités des pièces polaires de stator 586 et 588 et sont configurés
pour recevoir l'arbre 602 et les paliers respectifs 612 et 614.
Les extrémités des pièces
polaires de stator 506 et 508 sont configurés pour une relation donnée
d'accouplement souhaité avec des éléments de rotor 604 et 606. Par exemple, comme le montrent les vues en bout
exemplaires de Fig.25A et Fig.25B, avec capuchon d'extrémité 608 retiré,
l'extrémité de pôle de stator pièce 586 peut comprendre une partie
incurvée 616 qui est configuré pour créer un entrefer à réluctance
variable 618 avec un élément de rotor allongé 604 l'extrémité du
stator pièce polaire 588 comporte une partie incurvée 620 qui est
également configuré pour créer une à réluctance variable entrefer 622 avec
un membre du rotor 604.
En
particulier, la partie 618 comporte une courbure circonférentielle qui a
un point décalé en dessous de l'axe de rotation de l'arbre 602 et le
rotor 604 élément central, comme indiqué par le cercle 624 montré
dans l'ombre. De même, la partie 620 comprend
un rayon périphérique de courbure qui a un point de décalage au-dessus de l'axe
de rotation de l'arbre 602 et l'élément de rotor 604. Lorsque le flux magnétique passe le long du
trajet qui comprend une extrémité donnée de l'ensemble, de couplage maximal
entre le centre élément de rotor et de stator pièces polaires se produit
lorsque le rotor est positionné comme représenté sur la Fig.25B. En conséquence, les configurations d'élément
de rotor et illustré pièces polaires de stator d'eux-mêmes ne fournissent pas
de l'inclinaison de la direction de rotation de l'ensemble de rotor.

A cet égard, différentes
configurations pour le rotor et des extrémités de la pièce polaire du stator
sont représentés dans la vue d'extrémité de Figs.26-28, qui fournissent
des configurations biaiser le sens de rotation.
En particulier, dans le dispositif 620 de la Fig.26 un
élément de rotor 622 présentant des encoches 624 et 626, qui
encoches fournissent une plus grande couplage magnétique avec les pièces
polaires de stator 628 et 630 au niveau des coins 632 et 634 de
telle sorte que la rotation est asymétrique dans le sens horaire. Si encoches étaient plutôt situés dans les
coins 632 et 634, la rotation en biais dans le sens inverse des
aiguilles serait le résultat. Dans le
dispositif 620 dans le sens antihoraire telle rotation peut également
être obtenue en retirant l'arbre de rotor 622, en la retournant à bout à
bout, et de le remplacer sur l'arbre 636.
Dans
le dispositif 640 de la Fig.27, une portion 642 de la
partie d'extrémité incurvée de la pièce polaire du stator 644 est
retiré, et une partie 646 de la partie d'extrémité courbée de pièce
polaire de stator 648 est retiré.
Cette configuration entraîne une plus grande couplage magnétique entre
l'élément de rotor et le stator 650 pièce polaire 644 au coin 652,
et plus couplage magnétique entre l'élément de rotor et le stator 650 pièce
polaire 648 au coin 654, de sorte que la rotation est biaisée
dans le sens inverse des aiguilles.
Rotation dans le sens horaire pourrait être réalisé en modifiant la
place de l'autre côté de pièces polaires de stator 644 et 648.
Fig.28 représente une vue d'extrémité d'un
dispositif 660 dans laquelle l'axe 662 de la partie d'extrémité
incurvée de la pièce polaire du stator supérieur et le stator inférieur 664 pièce
polaire 666 est placée à un angle A, comme illustré. Cette configuration crée un écart inégal à
réluctance variable, l'air où des angles opposés de l'élément de rotor 668 sont
plus proches de stator pièces polaires 664 et 666. En outre, l'angle de couplage magnétique
maximal entre l'élément de rotor 668 et polaires de stator pièces 664
et 666 se produit est retardé par l'angle de rotation A. Serait dans le sens anti-horaire pour la
configuration illustrée.
Référant à nouveau à moteur 580
de Figs.23-25, un mouvement de rotation d'un tel dispositif est
représenté dans les vues en bout de Figs.29A-29D. Dans chaque extrémité de pouvoir utiliser le
capuchon d'extrémité a été retirée pour montrer la rotation des éléments de
rotor et dans chacune des Figs.29A-29D une vue d'extrémité illustrant
élément de rotor 604 et une vue en bout illustrant élément de rotor 606
sont représentés côte-à-côte. Dans
Fig.29A, élément de rotor 604 est définie comme étant à zéro degré
et l'élément de rotor 606 est définie comme étant à quatre vingt dix
degrés. Bobines de contrôle 594,
598 sont alimentées en un flux magnétique de l'aimant permanent aider de
manière telle qu'aucun flux magnétique traverse polaires de stator chemin de
pièce parties 590B et 592B. Ceci
permet élément de rotor 606 à se déplacer de sa position de quatre-vingt
dix degrés, et le couplage magnétique entre l'élément de rotor 604 et
polaires de stator chemin de pièce portions 590A et 592A provoque la
rotation de la position représentée sur la Fig.29B puis la Fig.29C. Quand élément de rotor 604 atteint la
position de quatre vingt dix degrés présenté en bobines de commande 594, 598
dans Fig.29D sont hors tension et bobines de commande 596, 600 sont
alimentées en un flux magnétique de l'aimant permanent aider manière provoquant
la rotation se poursuivre en raison du couplage magnétique entre le rotor
membres et 606 pôles de stator chemin de pièce parties 590B et 592B. Ainsi, en alimentant alternativement les
bobines de commande de chaque chemin à chaque rotation de quatre-vingt dix
degrés éléments de rotor 604 et 606, un mouvement de rotation continu
est réalisé.
Le
sens de rotation initial peut être commandée par les moyens de circuit servant
à exciter les bobines de commande 594, 598 et 596, 600, ce qui signifie
que le circuit comprend un circuit pour détecter la position angulaire des
éléments de rotor. En particulier, si
les membres du rotor 604 et 606 sont au repos dans la position indiquée
dans Fig.29A, et les bobines 594, 598 sont alimentés d'une
manière aidant, la rotation peut être dans le sens horaire ou antihoraire. Si la direction souhaitée est dans le sens
horaire, mais lors de l'excitation de bobines 594, 598 du rotor membres
commencent à se déplacer dans le sens antihoraire, le circuit de détection sera
immédiatement désexciter les bobines 594, 598 et exciter les bobines 596,
600 de sorte que le sens des aiguilles est réalisée.
En
outre, contourne autour des aimants permanents 582 et 584 pourraient
être prévus dans le dispositif de mouvement de rotation 580, tel que
ceux représentés sur la Fig.12, et des éléments de rotor 604 et 606 peuvent
être formés par des aimants permanents de manière à profiter de l'excitation
des bobines de commande en d'une manière ne dépassant.
Un
troisième mode de réalisation d'un dispositif de mouvement rotatif ou moteur 650
est représenté dans la vue en perspective éclatée partielle de Fig.30 et
dans la vue en perspective partielle assemblé Fig.31. Dans le moteur 650 de l'ensemble de
stator comprend un élément de commande 651 comprenant un aimant
permanent 652 ayant une pièce polaire de stator 654 positionné de
manière adjacente à une face polaire de l'aimant et une pièce polaire de stator
656 positionné de manière adjacente à la surface de pôle opposé. Stator pièce polaire 654 comporte une
partie de trajet 658A s'étendant sur un côté de l'aimant permanent 652
et une portion de voie 658B s'étendant à l'une de ses faces et à
distance de la première partie de trajet 658A. Bobines de commande 660 et 662 sont
positionnés le long polaires de stator chemin de pièce parties respectives 658A
et 658B.
De
la même manière, le pôle statorique pièce 656 comprend des parties de
chemin d'accès 664A et 664B qui s'étendent d'une manière similaire à
partir de lui de façon à être alignés avec des portions de chemin de stator 658A
et 658B respectivement. Bobines de
commande 666 et 668 sont positionnés le long polaires de stator chemin
de pièce parties respectives 664A et 664B. Positionné à l'opposé, et l'organe de
commande 651 faisant face, est un composant de commande similaire 670
comprenant l'aimant permanent 672 stator pièce polaire 674 avec
des parties de chemin 676A et 676B ayant les bobines de commande 678
et 680, et le pôle statorique pièce 682 avec des portions de trajet 684A
et 684B ayant leur bobines de commande 686 et 688. L'extrémité de chacun des pôles de portions de
trajet pièce 658A, 658B, 664A, 664B, 676A, 676B, 684A, 684B et est d'une
configuration généralement incurvée.
Ensemble
de rotor de moteur 650 comprend un arbre non magnétique 700 ayant
un élément de rotor à aimant permanent 702 monté sur elle et qui tourne
avec elle. Aimant permanent élément de
rotor 702 est généralement en forme d'anneau et segmentée pour inclure
nord distincte et faces polaires sud qui reverse sur chaque quatre-vingt dix
degrés autour d'eux. Lorsqu'ils sont
assemblés, les surfaces supérieure et inférieure de l'aimant permanent élément
de rotor 702 s'alignent avec les pièces polaires 654, 656, 674, et
682 de l'ensemble de stator et sont de préférence configurés de telle sorte
qu'il existe un écart minimal entre la surface extérieure de l'élément de rotor
à aimant permanent 702 et les surfaces incurvées des pièces polaires
portions de trajet.
La
rotation du dispositif 650 peut être obtenue par contrôle, à temps
d'excitation et la désexcitation de bobines de commande 660, 662, 666, 668,
678, 680, 686, 688 et rotation exemplaire est démontrée en se référant aux
vues de dessus de Figs.32A -32B qui représentent une rotation
antihoraire de l'aimant permanent élément de rotor 702 à travers un cent
quatre-vingt degrés. Dans Fig.32A partie
de trajet de pièce polaire de stator 658A du composant 651 est
active et la partie de trajet de pièce polaire de stator 658B n'est pas
actif, qui peut être obtenue en excitant la bobine de commande 660 dans
un flux magnétique d'aimant permanent aidant manière ou en alimentant la bobine
de commande 662 en un aimant permanent de manière adverse flux
magnétique. Partie de la trajectoire de
la pièce polaire de stator 676B du composant 670 est active et la
partie de trajet de pièce polaire de stator 676A n'est pas activé, ce
qui peut être réalisé en mettant sous tension la bobine de commande 680 dans
un flux magnétique d'aimant permanent aidant manière ou en mettant sous tension
la bobine de commande 678 à un aimant permanent aimanté de flux de
manière opposée.
Ainsi,
les parties 690 et 692 de membre permanent aimant du rotor 702,
qui ont toutes deux une polarité magnétique nord, seront repoussés par la
polarité nord du stator pièce polaire portions de voie 658A et 676B alignés
avec elle. Parties 694 et 696 de
membre permanent aimant du rotor 702, qui ont tous deux une polarité
magnétique sud, seront attirés par les portions de trajet actifs 658A et
676B. A l'instant où la partie de
l'élément de rotor 694 s'aligne avec le pôle statorique partie de trajet
de pièce 658A, comme représenté sur la Fig.32B, toutes les
bobines sont hors tension de telle sorte que toutes les parties de pôles de
trajet de pièce sont actifs comme illustré.
Pôle portions de voie de pièce 658B et 676A sont ensuite
maintenus en activité tandis que la pièce de pôle portions de voie 658A et
676B est inactive. Ceci est réalisé
en mettant sous tension des bobines de commande 662 et 678 dans un flux
magnétique d'aimant permanent ou d'aider manière en excitant les bobines de
commande 660 et 680 dans un flux magnétique de l'aimant permanent opposé
manière. Des parties d'élément de rotor 690
et 692 seront de nouveau repoussés par la polarité nord de parties de
chemin 658B et 676A alignée avec elle de manière que la rotation du
rotor à aimant permanent 702 est poursuivie.
Dans
Fig.32D toutes les bobines sont indiqués hors tension lorsque la partie
de rotor 692 s'aligne avec la partie de trajet de pièce polaire 658A. En continuant cette séquence synchronisée de
la mise sous tension et la mise hors tension des bobines de commande, un
mouvement de rotation continue est obtenue.
Comme expliqué plus haut, le sens de rotation initial peut être
commandée par des moyens de circuit qui détecte la direction initiale de
l'aimant permanent du rotor 702 et modifie le régime d'alimentation de
la bobine si la direction initiale est incorrecte immédiatement.
Une
vue de côté de moteur assemblé 650 est représenté sur la Fig.33 et
comprend un boîtier supérieur du boîtier ou une portion 710, une partie
de boîtier inférieure 712, 714 palier supérieur et un palier inférieur 716.
Un quatrième mode de réalisation
d'un dispositif à mouvement rotatif ou moteur 740 est illustré dans Figs.34-39. Moteur 740 comprend cinq composants de
commande de stator 742A-742E positionnés autour d'un élément aimant
permanent du rotor en forme d'anneau 744 (Fig.36). Comme on le voit en se référant aux Fig.37
à 742A composant, chaque composant de stator 742A comprend un
aimant permanent 746A avec une pièce polaire supérieure 748A positionné
de manière adjacente à une face polaire et une pièce polaire inférieure 750A
positionné de manière adjacente à la face de pôle opposé. Des bobines de commande 752A, 754A sont
positionnées le long des pièces polaires respectives 748A, 750A. Une dérivation 756A s'étend de la
pièce polaire 748A à pièce polaire 750A et est positionné entre
l'aimant permanent 746A et bobines de commande 752A, 754A. En variante, une dérivation 756A pourrait
être prévue sur le côté opposé de 746A à aimant permanent comme le
montre la Fig.38. Bien que non
représenté, il est prévu que membre de l'aimant permanent du rotor 744 pourrait
être monté sur un axe pour tourner avec elle et en ce qu'un carter de moteur ou
de l'enceinte pourrait être prévu, tel que représenté en relation avec le
moteur 650 de Fig.33.
Se
référant aux vues de dessus de Figs.39A-39D, le mouvement de rotation de
l'élément de rotor 744 est représenté par la séquence de vues. Les régions 770 et 772 dans Figs.39A-39D
représentent les régions magnétiques nord de la partie supérieure de
l'aimant permanent du rotor 744.
Dans Fig.39A bobines de commande 752E et 752C sont
alimentés en un aimant permanent et d'aider dépassant de manière telle que les
régions 770 et 772 de aimant permanent du rotor 744 sont
repoussés par les composants 742E et 742C tandis que les régions de
moteurs à aimants permanents 774 et 776 sont attirés par les composants 742E
et 742C. Les résultantes des forces
de couplage agissent pour déplacer le rotor à aimant permanent dans le sens
antihoraire à la position représentée sur la Fig.39B. Juste après aimant permanent région de rotor 772
passe sur le point indiqué dans Fig.39C, de la bobine de commande 752B
est alimenté en un aimant permanent d'aider et dépassant manière, tout en
bobines de commande 752E et 752C aussi restent sous tension, et en sens
inverse la rotation de rotor à aimant permanent 744 se poursuit. Juste après aimant permanent région de rotor
de 772 passes par élément de contrôle commande de 742C 752C de la
bobine est hors tension, alors que les serpentins de contrôle 752E et 752B restent
sous tension, afin de continuer à tourner dans le sens antihoraire. Puis, juste après aimant permanent région de
rotor 770 atteint l'endroit indiqué sur la bobine de commande 752D
dans Fig.39D est excité dans un flux de l'aimant permanent d'aider et
dépassant manière, alors que les serpentins 752E et 752B restent sous
tension, afin de continuer à tourner dans le sens antihoraire. Ainsi, comme dans les autres modes de réalisation,
l'excitation synchronisée et répétée et la mise hors tension des bobines de
commande entraîne le mouvement de rotation souhaitée.
En
termes de contrôle de l'excitation des bobines dans les dispositifs décrits
ci-dessus, divers circuit de commande électronique / moyens de commutation et
le circuit de commande électromécanique / machines de commutation sont
représentés dans Figs.40-44. Dans
le circuit 800 de la Fig.40 donné une bobine 802 est placé
en série entre une source d'énergie électrique 804 et un transistor
MOSFET de puissance 806. Une LED 808
est reliée à une source d'énergie électrique 804 à travers la
résistance 810 et est positionné pour frapper un phototransistor 812 qui
est connecté en série avec la résistance 814 A l'entrée de commande de
MOSFET 806 est connecté entre la résistance et le phototransistor 812. Par conséquent, lorsque LED 808 active
phototransistor 812, la chute de tension à travers la résistance 814 s'active
ou s'éteint, MOSFET 806 et la bobine 802 est sous tension. Retombée temporisée de bobine 802 est
assurée par le montage d'un interrupteur 816, comme le montre la Fig.42,
à l'arbre 816 du dispositif de moteur d'être commandé, de telle sorte
que comme interrupteur 814 tourne avec l'arbre 816 bobine 802 est
alternativement sous tension et ment sous tension. Dans un dispositif avec une pluralité d'enroulements d'une pluralité
correspondante de LED / paires de photorésistance peut être prévu.
Dans
le circuit 820 de la Fig.41 une bobine 822 est positionné
entre la source d'énergie électrique et de puissance 824, MOSFET 826 Un
commutateur à effet Hall 828 est connecté en série avec la résistance 830
Salle interrupteur 828 est également connectée à l'entrée de
commande du MOSFET 826 à travers la résistance 832 dans une salle
commutateur de périphérique donné 828 seraient positionnés pour réagir à
une variation du flux magnétique de façon à contrôler la commutation SUR / DE
de MOSFET 826, et donc la mise sous tension alternative et la retombée
de la bobine 822.
Dans
Fig.43 un circuit 840 de commande de deux bobines d'une manière
opposée est prévue de telle sorte que lorsque la bobine 842 est excitée
bobine 844 est désexcité, et de telle sorte que lorsque la bobine 842
est désexcité bobine 844 est excitée. Les deux enroulements 842 et 844 sont
connectés en série entre la source d'énergie électrique 846 et des
MOSFET de puissance respectifs 848 et 850 et une diode 852 phototransistor
agencement 854 est prévu, LED connectée en série avec une résistance 856
et un phototransistor connecté en série avec la résistance 858 lorsque
le voyant 852 tours phototransistor 854 sur la chute de tension
aux bornes de la résistance 858 tours MOSFET 848 et la bobine SUR
842 est excité. A cette époque,
la tension appliquée à l'entrée de commande du MOSFET 850 sera faible et
donc MOSFET 850 sera DE et la bobine 844 sera mis hors
tension. Lorsque interrupteur 814 blocs LED 852, phototransistor 854
est coupée et MOSFET 848 est également désactivé. L'entrée de commande du MOSFET 850 est donc
tirée vers le haut à travers la résistance 860 et MOSFET 850 est
activé de telle sorte que la bobine 844 est sous tension.
Dans Fig.44, de système 870
compris un élément 872 monté sur l'arbre rotatif 874 est
pourvu, sur le côté gauche de l'élément conducteur 872 étant
alternativement à 876 et non conducteur à 878 bobines 880 et
882 sont reliées aux balais respectifs 884 et 886 qui sont
positionnés pour contacter élément 872 au cours de chaque rotation de
l'arbre. Membre 872 est relié par
brosse 890 à alimentation 888.
Ainsi, les bobines 880 et 882 sera alternativement sous tension
et hors tension de celui-ci comme les brosses respectives en contact avec les
parties conductrices et non conductrices de membre 872.
N'importe
lequel de ces moyens de circuit, les variations de ceux-ci, ou d'autres moyens
de circuit peuvent être utilisés pour fournir l'excitation synchronisée des
bobines de commande dans les divers modes de réalisation de la présente
invention.
De
la description qui précède des modes de réalisation représentés, il est évident
que les buts de l'invention sont atteints.
Bien que l'invention ait été décrite et illustrée en détail, il doit
être clairement entendu que celle-ci est destinée à titre d'illustration et
d'exemple uniquement et ne doit pas être prise à titre de limitation.
Par
exemple, bien que les techniques de contrôle de flux magnétique de la présente
invention ont été examinés selon le cas notamment pour des applications
diverses motrices, de telles techniques de contrôle de flux magnétique sont
également utiles dans des applications statiques.
Conversion d'énergie
En
se référant à Figs.45A-45C, on a représenté le dispositif à aimants
permanents 900 qui comporte deux trajets de flux magnétiques fournis par
pièce polaire rectangulaire 902 qui comprend une partie supérieure 904
et la partie inférieure 906 de chaque positionnée contre une face de
pôle respective de aimant permanent 910. Contrairement au dispositif de Figs.7-9, tombent armatures ne
sont pas fournis. Au lieu de cela,
armatures fixes sous la forme de pôles intégrante pièce parties 912 et 914 s'étendent
à partir de la partie supérieure 904 à la partie 906 abaisser
remplir les deux chemins de flux d'une manière permanente. Des bobines de commande 916, 918 sont
prévus le long d'un flux avec la route et de commande des bobines 920, 922 sont
prévus le long de l'autre trajet de flux, ces bobines de commande agissant
enroulements comme primaires dans le dispositif 900. Une bobine 924 est positionné
autour de la partie de la pièce polaire 912 et une autre bobine 926 est
positionné autour de la partie de pièce polaire 914, ces bobines 924,
926 agissant comme bobinages secondaires dans le dispositif 900.
Dans Fig.45A aucun
bobines sont sous tension et le flux magnétique de l'aimant permanent divise
également entre les chemins 930 et 932, couplage avec les deux bobine 924
et la bobine 926.

Dans
Fig.45B bobines 916, 918 sont alimentés en un flux magnétique de
manière à aider à aimant permanent de manière à coupler avec tout le flux
magnétique de l'aimant permanent 910.
Tout le flux magnétique
circule le long du trajet 930, comme illustré, et donc des couples avec
bobine 924.

En Fig.45C
bobines 920, 922 sont alimentés dans un flux magnétique de l'aimant
permanent aider de manière telle que tous flux magnétique traverse le chemin 932
et les couples avec bobine 926 par des bobines en continu
alternativement sous tension et de mise hors tension 916, 918 et 920, 922 dans
un tel une conversion de l'énergie de manière est obtenue grâce au couplage
avec les bobines 924 et 926. le flux magnétique dans les intégrales des
parties de pièces polaires 912 et 914, et donc le couplage de flux avec
des bobines respectives 924 et 926, varie d'un facteur de deux fois la
quantité d'flux magnétique généré par les bobines d'excitation 916, 918 et
920, 922.
La
construction représentée sur la Fig.45A et Fig.45X sont similaires à la
construction représentée sur la Fig.7 et la Fig.47. La différence dans les deux cas concerne le
remplacement des deux chemins et armatures de flux avec un trajet de flux
continue . L'agencement de la Fig.7 a un aimant permanent et quatre
bobines et l'agencement de la Fig.47 a deux aimants permanents et deux
bobines. Bien que les aspects physiques
des deux modalités et les détails de la commande de flux varient, la méthode de
contrôle pour faire varier les aimants permanents flux sont similaires et sera
décrite en même temps et que des différences sera souligné.
Avec
les chemins de flux continu le flux statique de la ou les aimants permanents
est inutile. Cependant, si le flux
statique de l'aimant permanent limité aux trajets de flux ont été modifiés pour
être variable dans le temps qu'elle aurait utilité pour les appareils à
induction électromagnétique pour la conversion d'énergie, comme des
transformateurs et des convertisseurs de puissance. Cependant, le même procédé de base pour
commander le flux d'un aimant permanent pour fournir un mouvement rotatif et
linéaire peut également être appliquée à la variable dans le temps du flux
statique de l'aimant permanent. La
construction représentée sur la Fig.45X utilise quatre bobines de
commande et un seul aimant permanent tandis que la construction représentée sur
la Fig.45A utilise deux bobines de commande et les deux aimants
permanents. Le flux qui devraient
normalement être fournie par un enroulement primaire est alimenté par le flux
statique de l'aimant ou des aimants permanents et des bobines de commande
convertir ce flux statique en un temps variant de flux d'une manière nouvelle.
Les deux arrangements utilisent deux bobines secondaires, les bobines
secondaires sont placés dans la région de la zone de flux continu qui serait
occupée par un induit ou rotor en régime linéaire ou rotatif. Les régions des trajets de flux qui
effectuent le travail sont les mêmes dans tous les cas.
Dans
tous les cas, les bobines de commande peuvent être connectés soit en série ou
en parallèle et les enroulements secondaires peuvent être soit enroulée en
série ou en parallèle. Plus d'un
enroulement secondaire ou plusieurs enroulements secondaires avec les robinets
peuvent être placés dans les zones de travail et d'autres chemins de flux
multiples peuvent être utilisés avec un ou plusieurs enroulements secondaires
placés dans chacune des zones de travail.
Ceci est rendu évident par les descriptions des dispositifs linéaires et
rotatifs présentes et basé sur le fait que les zones de travail des chemins de
flux sont identiques.
Fig.45X Fig.45A et montrent également les chemins du flux statique de
l'aimant permanent ou les aimants lorsque aucun courant ne circule dans les
bobines de commande. Dans l'agencement
représenté sur la Fig.45X le flux de l'aimant permanent unique se divise
entre les deux zones de travail du chemin de flux. Dans l'agencement de la totalité de la Fig.45A
flux de l'un des aimants permanents passe à travers l'une des zones de
travail et tout le flux du second aimant permanent passe à travers l'autre
région de travail. Chacune des régions
de travail dans les deux cas, sont occupés par des bobines secondaires.
Fig.45Y et Fig.45B montrent les bobines de commande alimentés avec la
polarité indiquée par rapport à la polarité de l'aimant permanent ou les
aimants inclus. Dans Fig.45Y la
bobine adverse, bloque le passage du flux de l'aimant permanent, et les couples
de bobines aider avec le flux de l'aimant permanent et donc tout le flux de
l'aimant permanent traverse une région de travail comme indiqué. Dans Fig.45B le côté opposé des blocs
de bobine le passage du flux de l'aimant permanent sur le côté opposé de la
bobine et le côté aide des couples de bobines avec le flux de l'autre aimant
permanent et donc la totalité du flux des deux les aimants permanents passent à
travers la zone de travail comme le montre.
Fig.45Z et Fig.45C montrent les bobines de commande sous
tension avec une polarité inverse de celui indiqué dans Fig.45Y et Fig.45B. Le même effet se produit et conduit à
l'ensemble de la trajectoire de l'aimant ou des aimants permanents de flux passant
à travers les régions de travail opposées.
En alternant la polarité des
bobines de commande pendant un cycle, une zone de travail subit une
augmentation de flux et la région opposée subit une diminution de flux et au
cours du cycle suivant le contraire qui se produit. Cela se traduit par l'induction d'une tension dans
les bobines secondaires qui est déterminé par l'amplitude de la variation de
flux dans la zone de travail et la durée pendant laquelle ce changement se
produit. La nouveauté de cette découverte
est que le flux primaire induisant la tension dans les bobines secondaires est
fournie par le ou les aimants permanents et est beaucoup plus grand que le flux
fourni par les bobines de commande.
En outre, dans les dispositifs
de mouvement de rotation des Fig.31 et Fig.34, il n'est pas nécessaire
que les éléments de rotor respectifs 702 et 744 se former des aimants
permanents. Chacun pouvait prendre
la forme présentée dans Fig.46 où les sections 950 et 952 sont
formés d'un matériau magnétique comme le fer doux et les articles 954 et 956
sont formés par un matériau de remplissage non-magnétique.
Fig.47 and Fig.48 montre un autre mode de réalisation du
dispositif 1000 de l'objet. Le
mode de réalisation 1000 comprend deux aimants permanents espacés 1002
et 1004 dont chacune a son pôle nord à proximité de la surface supérieure
et son pôle sud à proximité de la surface inférieure. Un élément de transition magnétisable 1006
s'étend sur et entre en contact avec les pôles magnétiques nord des aimants
1002 et 1004 et un autre élément magnétisable de pontage 1008 entre
en contact avec les pôles magnétiques sud des deux aimants permanents 1002
et 1004.
Les
éléments 1006 et 1008 se prolongent légèrement au-delà des côtés opposés
des aimants permanents respectifs 1002 et 1004, et une paire d'éléments
d'armature espacés 1010 et 1012 sont positionnées pour se déplacer dans
et hors de prise avec les extrémités des éléments 1006 et 1008. bobines 1014
et 1016 sont montés respectivement sur les organes 1006 et 1008 dans
l'espace entre les aimants permanents 1002 et 1004 et des armatures 1010 et
1012 sont représentés reliés entre eux par une tige 1018 qui leur
permet de se déplacer vers l'arrière et vers l'avant en prise avec les éléments
respectifs 1006 et 1008 lorsque des tensions différentes sont appliquées
aux bobines respectives 1014 et 1016.
Dans
Fig.47, les bobines 1014 et 1016 sont excités comme montré avec
la bobine 1014 ayant son extrémité nord magnétique vers la gauche et son
extrémité sud magnétique vers la droite et l'inverse est vrai de la bobine 1016. Dans Fig.48, la tension appliquée aux
bobines respectives 1014 et 1016 est inversée de sorte que la polarité
de l'extrémité gauche de la bobine 1014 est sud et la polarité de
l'extrémité opposée de la même bobine 1014 est un pôle magnétique
nord. L'inverse est vrai de la bobine 1016. Dans Fig.47 et Fig.48 il convient de
noter que la relation d'aide et d'opposant est indiqué sur les chiffres pour
indiquer la relation lorsque les bobines sont alimentées. Par exemple, dans Fig.47 lorsque les
bobines sont alimentées comme le montre la relation s'oppose à l'aimant
permanent 1002 et est aidait par rapport à l'aimant permanent 1004. L'inverse est vrai lorsque la tension sur les
bobines est inversée comme le montre la Fig.48. Le mouvement de l'armature est donc contrôlée
par au bon moment, la tension sur ces bobines. Les mêmes principes peuvent être appliqués pour produire un mouvement de
rotation comme le montre la Fig.42.
Fig.49 montre un autre mode de réalisation 1030 de la
présente invention en utilisant des principes similaires à ceux décrits en
liaison avec les Fig.47 et Fig.48. Le mode de réalisation 1030 comprend
une pluralité, trois étant représenté, de membres fixes 1032, 1034 et 1036.
Les
détails de ces éléments sont mieux représentés sur Fig.50 qui montre les
détails de l'élément 1036. Cet élément comprend une paire d'aimants
permanents 1038 et 1040, qui ont chacun des membres magnétisables montés
adjacents à des côtés opposés, il est, comme dans le précédent
construction. Les éléments 1042 et
1044 ont également bobines 1046 et 1048, respectivement, et les
bobines sont alimentées comme décrit en relation avec Fig.47 et Fig.48 aider
à produire et à s'opposer magnétisme. La
construction représentée sur la Fig.49 peut comporter trois parties de
stator comme indiqué, ou il peut avoir plusieurs parties de stator si
besoin. Le rotor 1050 est
positionné dans l'espace entre les éléments 1032, 1034 et 1036 et
comprend un permanent d'aimant de partie dont une partie a son pôle nord
magnétique sur la surface, comme indiqué, et les autres parties ont leur pôle
magnétique sud de la même surface, comme illustré. Les aimants permanents 1038 et 1040 sur les stators interagissent
avec les aimants permanents sur le rotor pour produire le mouvement de rotation
et est commandé par l'excitation des bobines.
STEPHEN PATRICK et
Al: GÉNÉRATEUR ÉLECTROMAGNÉTIQUE IMMOBILE
Brevet américain 6 362 718
26 mars 2002
Inventeurs: Stephen Patrick, Thomas Bearden,
James Hayes, Kenneth Moore et James Kenny
GÉNÉRATEUR ÉLECTROMAGNÉTIQUE IMMOBILE
S'il vous plaît noter
que ceci est un extrait reformulé de ce brevet.
Il décrit un dispositif électrique qui lui-même et alimente en courant
l'équipement externe supplémentaire pouvoirs.
RÉSUMÉ
Générateur
électromagnétique sans pièces en mouvement comprend un aimant permanent et un
noyau magnétique comprenant des premier et second trajets magnétiques. Une première bobine d'entrée et une première
bobine de sortie s'étendent autour de parties du premier chemin magnétique,
tandis qu'une seconde bobine d'entrée et une deuxième bobine de sortie
s'étendent autour de parties de la seconde voie magnétique. Les bobines d'entrée sont alternativement
pulsé pour fournir des impulsions de courant induit dans les bobines de
sortie. Conduite courant électrique à
travers chacune des bobines d'entrée réduit un niveau de flux de l'aimant
permanent à l'intérieur de la trajectoire de l'aimant autour de laquelle la
bobine d'entrée s'étend. Dans une
variante de réalisation d'un générateur électromagnétique, le noyau magnétique
comprend des plaques annulaires espacées, avec des poteaux et des aimants
permanents qui s'étendent d'une manière alternée entre les plaques. Une bobine de sortie s'étend autour de chacun
de ces postes. D'entrée des bobines
s'étendant autour de parties des plaques sont pulsés pour provoquer l'induction
de courant dans les bobines de sortie.
DESCRIPTION
Domaine de
l'invention : Cette invention concerne un générateur magnétique, sans
pièces mobiles, servant à produire de l'énergie électrique, et plus
particulièrement, à un tel dispositif capable de lui-même sous tension.
Description de
la technique apparentée : La littérature des brevets décrit un certain
nombre de générateurs magnétiques, chacun d'entre eux comprend un aimant
permanent, deux chemins magnétiques externe de l'aimant permanent, dont chacun
s'étend entre les pôles opposés de l'aimant permanent, des moyens de
commutation pour amener le flux magnétique à circuler alternativement le long
de chacun des deux chemins magnétiques, et une ou plusieurs bobines de sortie
dans lequel le courant est amené à s'écouler au moyen de changements dans le champ
magnétique à l'intérieur du dispositif.
Ces dispositifs fonctionnent en accord avec une extension de la loi de
Faraday, ce qui indique que le courant électrique est induit dans un conducteur
dans un champ magnétique variable, même si la source de champ magnétique est
stationnaire.
Procédé de commutation
de flux magnétique de circuler principalement le long l'un des deux chemins
magnétiques entre les pôles opposés d'un aimant permanent est décrit comme un
principe de " transfert de flux " par RJ Radus Digest de l'ingénieur,
le 23 juillet, 1963. Ce principe est
utilisé pour exercer un puissant champ magnétique à une extrémité des deux
pôles nord et sud et une force très faible à l'autre bout, sans être utilisé
dans la construction d'un générateur magnétique. Cet effet peut être provoqué mécaniquement,
par déplacement de la gâche, ou électriquement, en conduisant un courant
électrique à travers un ou plusieurs enroulements de commande s'étendant
versions autour du type allongé, les pièces polaires 14. Plusieurs dispositifs utilisant cet effet sont décrits dans les brevets
US. 3.165.723, 3.228.013, et 3.316.514.
Une autre étape pour l'élaboration d'un
générateur magnétique est décrit dans le brevet US n ° 3.368.141, comme un
dispositif comportant un aimant permanent en combinaison avec un transformateur
ayant des premier et second enroulements autour d'un noyau, avec deux chemins
de flux magnétique qui part de chaque pôle de l'aimant permanent à chaque
extrémité du noyau, de sorte que, quand un courant alternatif induit magnétique
changements de direction du flux dans le noyau, le flux magnétique de l'aimant
permanent est automatiquement dirigé à travers la trajectoire qui correspond à
la direction prise par le flux magnétique à travers le noyau à cause du
courant. De cette manière, le flux
magnétique est intensifiée. Ce
dispositif peut être utilisé pour améliorer le facteur de puissance d'un
circuit de courant alternatif généralement chargé par induction.
D'autres brevets décrivent des générateurs
magnétiques dans lesquels un courant électrique à partir d'une ou plusieurs
bobines de sortie est décrite comme étant mises à disposition pour entraîner
une charge, de la manière la plus classique d'un générateur. Par exemple, le brevet US n ° 4,006,401 décrit
un générateur électromagnétique comprenant un aimant permanent et un élément de
noyau, dans lequel le flux magnétique de l'aimant dans l'élément de base est
rapidement en alternance par commutation pour générer un courant alternatif à
un enroulement sur le noyau membre. Le dispositif
comprend un aimant permanent et deux pistes de circuit magnétique de flux
distincts entre les pôles nord et sud de l'aimant. Chacun des chemins de circuit comprend deux
moyens de commutation pour alternativement ouvrir et fermer les chemins de
circuit, la génération d'un courant alternatif dans un bobinage de l'élément de
noyau. Chacun des moyens de commutation
comprend un circuit de commutation magnétique croisant le chemin de circuit,
avec le circuit magnétique de commutation comportant une bobine à travers
laquelle le courant est commandé pour induire un flux magnétique pour saturer
le trajet de circuit qui s'étend de l'aimant permanent. Alimentation pour conduire ces bobines est dérivée
directement de la sortie d'une source de courant alternatif appliqué en
continu. Ce qui est nécessaire est un
générateur électromagnétique ne nécessitant pas l'application d'une telle
source de courant.
Le brevet US n °
4,077,001 décrit un générateur magnétique, ou convertisseur continu / continu,
comprenant un aimant permanent ayant des pôles espacés et un champ magnétique
permanent qui s'étend entre les pôles de l'aimant. Un noyau à réluctance variable, est disposé
dans le champ par rapport à l'aimant fixe et la réluctance du noyau varie de
façon à provoquer le motif de lignes de force du champ magnétique à
décaler. Un conducteur de sortie est
disposé dans le champ par rapport à l'aimant fixe et est positionnée pour être
coupé par les lignes de force magnétique de décalage permanent de telle sorte
qu'une tension est induite dans le conducteur.
Le flux magnétique est commuté entre des chemins de remplacement au
moyen de la commutation des bobines s'étendant autour de parties de l'âme, avec
la circulation de courant étant alterné entre ces bobines de commutation par
l'intermédiaire d'une paire de transistors pilotés par les sorties d'un
flip-flop. L'entrée de la bascule est
entraînée par un oscillateur à fréquence réglable. Alimentation pour ce circuit
de commande est alimenté par une source d'énergie supplémentaire, séparé. Ce qui est nécessaire est un générateur
magnétique ne nécessitant pas l'application d'une telle source de puissance.
Brevet US n ° 4,904,926 décrit un autre
générateur magnétique utilisant le mouvement d'un champ magnétique. Le dispositif comprend un enroulement
définissant une zone magnétiquement conducteur électrique ayant des bases à
chaque extrémité, y compris les éléments d'enroulement pour la retirer d'un
courant induit par celui-ci. Le générateur
comporte en outre deux aimants polaires, ayant chacune un premier et un second
pôle, chaque premier pôle magnétique en communication avec une base de la zone
magnétiquement conducteur. Le générateur
comprend en outre un troisième aimant de pôle, la troisième aimant de pôle
orienté de façon intermédiaire des premiers pôles des deux électro-aimants de
pôle, la troisième aimant de pôle ayant un axe magnétique sensiblement
transversale à un axe de la zone magnétiquement conducteur, le troisième aimant
ayant un pôle plus proche de la zone conductrice et en relation d'attraction
magnétique pour les premiers pôles des deux électro-aimants de pôles, dans
lequel celui-ci les premiers pôles sont comme les pôles. Sont également inclus
dans le générateur sont des éléments, sous la forme d'enroulements, de manière
cyclique pour inverser les polarités magnétiques des électro-aimants. Ces moyens d'inversion, par une modification
cyclique des polarités magnétiques des électro-aimants, provoquent les lignes
de flux magnétiques associés à la relation d'attraction magnétique entre les
premiers pôles des électro-aimants et le pôle le plus proche de la troisième
aimant pour inverser de façon correspondante, ce qui provoque un effet
d'essuyage dans la zone magnétiquement conducteur, que les lignes de flux
magnétique oscillant entre des première pôles des deux électro-aimants,
induisant ainsi un mouvement d'électrons à l'intérieur des enroulements de
sortie et générant ainsi un flux de courant dans les enroulements de sortie.
Le brevet US n °
5,221,892 décrit un générateur magnétique sous la forme d'un transformateur de
compression directe du flux de courant comprenant une enveloppe ayant des pôles
magnétiques définissant un axe magnétique et caractérisé par un motif de lignes
de flux magnétique à symétrie polaire autour de l'axe. Les lignes de flux magnétique se déplacent
dans l'espace par rapport à l'enveloppe magnétique en utilisant des éléments de
commande qui sont mécaniquement fixe par rapport au noyau. Complémentaires fournies sont des éléments inductifs qui sont aussi
mécaniquement fixe par rapport à l'enveloppe magnétique. Déplacement spatial du flux par rapport aux
éléments inductifs provoque un flux de courant électrique. À condition en outre des vannes de flux
magnétique qui assurent la variation de la réluctance magnétique pour créer un
motif de domaine de temps de respectivement augmentée et diminuée reluctance
magnétique à travers les vannes magnétiques, et, de ce fait, à travers les
éléments inductifs.
D'autres brevets décrivent
des dispositifs utilisant des éléments supraconducteurs pour provoquer le
déplacement du flux magnétique. Ces
dispositifs fonctionnent en accord avec l'effet Meissner, qui décrit
l'expulsion de flux magnétique à partir de l'intérieur d'une structure
supraconductrice de la structure subit le passage à une phase
supraconductrice. Par exemple, le brevet
US n ° 5.011.821 décrit un dispositif de génération d'énergie électrique
comportant un faisceau de conducteurs qui sont placés dans un champ magnétique
généré par au nord et au sud pièces polaires d'un aimant permanent. Le champ magnétique est déplacé d'avant en
arrière à travers le faisceau de conducteurs par une paire de films minces de
matériau supraconducteur. L'un des films minces est placé dans l'état
supraconducteur tandis que l'autre film mince est dans un état non
supraconducteur. Comme les Etats sont
cycliquement inversées entre les deux films, le champ magnétique est dévié en
arrière à travers le faisceau de conducteurs.
Le brevet US n ° 5.327.015
décrit un appareil pour produire une impulsion électrique, comprenant un tube
en matériau supraconducteur, une source de flux magnétique monté sur une
extrémité du tube, un moyen, tel qu'une bobine, pour intercepter le flux monté
le long du tube et un moyen pour changer la température du supraconducteur
monté sur le tube. Comme le tube est
progressivement rendu supraconducteur, le champ magnétique est piégé à
l'intérieur du tube, créant ainsi une impulsion électrique dans les moyens
d'interception. Une reprise de l'état
supraconducteur produit une seconde impulsion.
Aucun des dispositifs
brevetés décrits ci-dessus utilisent une partie de la puissance électrique
générée dans le dispositif pour alimenter les moyens d'inversion utilisés pour
modifier le chemin de flux magnétique.
Ainsi, comme des générateurs tournants classiques, ces dispositifs
nécessitent un apport constant d'énergie, qui peut être sous la forme d'énergie
électrique d'entraînement des moyens d'inversion de l'un de ces générateurs magnétiques
ou le couple d'entraînement du rotor d'un générateur rotatif
conventionnel. Cependant, la fonction
essentielle de la partie magnétique d'un générateur électrique est simplement
de changer les champs magnétiques conformément à une synchronisation
précise. Dans la plupart des
applications conventionnelles des générateurs magnétiques, la tension est
commutée entre les bobines, ce qui crée des champs magnétiques dans les bobines
qui sont utilisées pour remplacer les champs d'aimants permanents, de telle
sorte qu'une quantité substantielle de l'énergie doit être fournie au
générateur pour alimenter les moyens de commutation, ce qui réduit l'efficacité
du générateur.
Les progrès récents en matière magnétique,
qui ont notamment été décrits par Robert C. O'Handley dans les matériaux
magnétiques modernes, principes et applications, John Wiley & Sons, New
York, pp. 456-468, fournissent alliages magnétiques nanocristallins, qui sont
particulièrement bien adapté de suite commutation rapide du flux magnétique. Ces alliages sont essentiellement constitués
de grains cristallins, ou cristallites, dont chacune a au moins une dimension
de l'ordre de quelques nanomètres. Les
matériaux nanocristallins peuvent être préparés par des alliages amorphes de
traitement thermique qui forment des précurseurs pour les matériaux
nanocristallins, dans laquelle les éléments insolubles, tels que le cuivre, on
ajoute pour favoriser la nucléation massif, et dans laquelle la stabilité, des
matériaux d'alliage réfractaires, tels que le niobium ou le tantale sont
ajoutés pour inhiber la croissance des grains.
La majeure partie du volume des alliages nanocristallins est composé de
cristallites distribués de façon aléatoire ayant des dimensions d'environ 2 à
40 nm. Ces cristallites sont nucléées et
passée d'une phase amorphe, avec des éléments insolubles rejetées au cours du
processus de croissance des cristallites.
En termes magnétiques, chaque cristallite est une particule unique
domaine. Le volume restant d'alliages
nanocristallins est constitué d'une phase amorphe sous la forme de joints de
grains ayant une épaisseur d'environ 1 nm.
Les matériaux
magnétiques ayant des propriétés particulièrement utiles sont formées à partir
d'un Co amorphe - Nb - B (cobalt-niobium-bore) en alliage ayant une
magnétostriction proche de zéro et relativement forte aimantation, ainsi qu'une
bonne résistance mécanique et résistance à la corrosion. Procédé de recuit de ce matériau peut être
modifiée pour modifier la taille des cristallites formées dans le matériau,
avec un fort effet résultant sur la coercitivité CC. La précipitation de nanocrystallites améliore
également les performances CA des alliages amorphes contraire.
Autres matériaux
magnétiques sont formées en utilisant des alliages amorphes et nanocristallins
riches en fer, qui montrent généralement plus aimantation des alliages à base
de cobalt. De tels matériaux sont, par
exemple, Fe - B - Si - Nb - Cu (fer-bore-silicium-cuivre-niobium) alliages. Bien que la perméabilité des alliages amorphes
riches en fer est limitée par les niveaux relativement importantes de la
magnétostriction, la formation d'un matériau nanocristallin à partir d'un tel
alliage amorphe réduit considérablement à ce niveau de la magnétostriction,
favorisant aimantation facile.
Des progrès ont
également été accomplis dans le développement de matériaux pour aimants
permanents, en particulier dans le développement de matériaux, y compris des
éléments de terres rares. Ces matériaux
comprennent du samarium cobalt, SmCo5, qui est utilisé pour former un matériau
d'aimant permanent ayant la plus grande résistance à la démagnétisation de tout
matériau connu. D'autres matériaux
magnétiques sont réalisés, par exemple, en utilisant des combinaisons du fer,
du néodyme et bore.
RESUME DE
L'INVENTION :
C'est un premier but de
la présente invention est de fournir un générateur magnétique qui élimine le
besoin d'une source d'alimentation externe pendant le fonctionnement du
générateur.
C'est un deuxième
objectif de la présente invention est de fournir un générateur magnétique dans
lequel un trajet de flux magnétique est modifiée sans qu'il soit nécessaire de
maîtriser un champ magnétique pour changer sa direction.
C'est un troisième but
de la présente invention est de fournir un générateur magnétique dans lequel la
génération de l'électricité est réalisée sans partie mobile.
Dans l'appareil de la
présente invention, le chemin de flux magnétique d'un aimant permanent est
commuté d'une manière ne nécessitant pas l'écrasant des champs magnétiques. En outre, un processus d'auto-initié
commutation itératif est utilisé pour basculer le flux magnétique de l'aimant
permanent entre les chemins magnétiques alternés au sein de l'appareil, avec la
puissance d'opérer la commutation itératif étant fourni par un circuit de
commande comprenant des composants connus pour utiliser la faible niveaux de
pouvoir. Grâce à auto-commutation, un
besoin pour une source d'alimentation externe pendant le fonctionnement du générateur
est éliminé, avec une source d'alimentation distincte, telle qu'une batterie,
utilisée uniquement pour très peu de temps lors du démarrage du générateur.
Selon un premier aspect
de la présente invention, un générateur électromagnétique est prévu, comprenant
un aimant permanent, un noyau magnétique, une première et une deuxième bobines
d'entrée, des premier et second enroulements de sortie, et un circuit de
commutation. L'aimant permanent a des
pôles magnétiques au niveau des extrémités opposées. Le noyau magnétique comprend un premier
circuit magnétique, autour de laquelle les premières bobines d'entrée et de
sortie s'étendent, et un second chemin magnétique, autour de laquelle les
secondes bobines d'entrée et de sortie s'étendent, entre les extrémités
opposées de l'aimant permanent. Le
circuit de commutation conduit le courant électrique en alternance à travers
les première et deuxième bobines d'entrée.
Le courant électrique à travers le premier conduit d'entrée d'huile
provoque la première bobine d'entrée pour produire un champ magnétique
s'opposant à une concentration de flux magnétique de l'aimant permanent dans le
premier chemin magnétique. Le courant
électrique conduit à travers la deuxième bobine d'entrée provoque la deuxième
bobine d'entrée pour produire un champ magnétique s'opposant à une
concentration de flux magnétique de l'aimant permanent à l'intérieur de la
seconde voie magnétique.
Selon un autre aspect
de la présente invention, un générateur électromagnétique est prévu, comprenant
un noyau magnétique, une pluralité d'aimants permanents, une première et une
seconde pluralités de bobines d'entrée, une pluralité de bobines de sortie, et
un circuit de commutation. Le noyau
magnétique comprend une paire de plaques espacées, dont chacune a une ouverture
centrale et des première et seconde pluralités de montants s'étendant entre les
plaques espacées. Les aimants permanents
s'étendent chacune entre la paire de plaques espacées. Chaque aimant permanent comporte des pôles
magnétiques au niveau des extrémités opposées, les champs magnétiques de tous
les aimants permanents étant alignés pour s'étendre dans une direction
commune. Chaque bobine d'entrée s'étend
autour d'une partie d'une plaque à l'intérieur des plaques espacées, entre un
poste et un aimant permanent. Une bobine
de sortie s'étend autour de chaque poste.
Le circuit de commutation conduit le courant électrique en alternance à
travers les première et deuxième bobines d'entrée. Le courant électrique conduit à travers
chaque bobine d'entrée dans la première pluralité de bobines d'entrée provoque
une augmentation du flux magnétique à l'intérieur de chaque poste au sein de la
première pluralité de messages depuis des aimants permanents de chaque côté de
la poste et une diminution du flux magnétique au sein de chaque poste au sein
de la deuxième pluralité de messages depuis des aimants permanents de chaque
côté de la poste. Le courant électrique
conduit à travers chaque bobine d'entrée dans la seconde pluralité de bobines
d'entrée provoque une diminution du flux magnétique au sein de chaque poste au
sein de la première pluralité de messages depuis des aimants permanents de
chaque côté de la poste et une augmentation du flux magnétique à l'intérieur de
chaque poste au sein de la deuxième pluralité de messages depuis des aimants
permanents de chaque côté du poste.
BREVE
DESCRIPTION DES DESSINS:
La Fig.1 est une
élévation de face en partie schématique d'un générateur magnétique et les
circuits électriques associés construits conformément à une première version du
premier mode de réalisation de la présente invention :
Fig.2 est une vue
schématique d'une première version d'un circuit de commutation et de commande
dans les circuits électriques associés de la Fig.1 :
Fig.3 est une
représentation graphique des signaux de commande produits dans le circuit de la
Fig.2 :
Fig.4 est une vue schématique d'une deuxième version
d'un circuit de commutation et de commande dans les circuits électriques
associés de la Fig.1 :
Fig.5 est une
représentation graphique des signaux de commande produits dans le circuit de la
Fig.3 :
Fig.6A est une représentation graphique d'un premier
signal de commande à l'intérieur de l'appareil de la Fig.1,
Fig.6B est une représentation graphique d'un second
signal de commande à l'intérieur de l'appareil de la Fig.1,
Fig.6C est une représentation graphique d'un signal de
tension d'entrée à l'intérieur de l'appareil de la Fig.1,
Fig.6D est une représentation graphique d'un signal de
courant d'entrée à l'intérieur de l'appareil de la Fig.1,
Fig.6E est une représentation graphique d'un premier
signal de tension de sortie à l'intérieur de l'appareil de la Fig.1,
Fig.6F est une représentation graphique d'un deuxième
signal de tension de sortie à l'intérieur de l'appareil de la Fig.1,
Fig.6G est une représentation graphique d'un premier
signal de courant de sortie à l'intérieur de l'appareil de la Fig.1,
Fig.6H est une représentation graphique d'un deuxième
signal de courant de sortie à l'intérieur de l'appareil de la Fig.1:
Fig.7 est une représentation graphique de la puissance
de sortie mesurée à l'intérieur de l'appareil de la Fig.1, en fonction
de la tension d'entrée :
Fig.8 est une représentation graphique d'un coefficient
de performance, calculé à partir des mesures à l'intérieur de l'appareil de la Fig.1,
en fonction de la tension d'entrée :
Fig.9 est une vue en élévation en coupe transversale
d'une deuxième variante du premier mode de réalisation de la présente invention
:
Fig.10 est une vue de dessus d'un générateur magnétique
construit conformément à une première version d'un second mode de réalisation
de la présente invention :
Figure 11 est une vue de face du générateur magnétique de la
Fig.10 :

Fig.12 est une vue de dessus d'un générateur magnétique
construit en accord avec une seconde version du second mode de réalisation de
la présente invention :
DESCRIPTION DETAILLEE DE L'INVENTION:
Fig.1 est une
élévation de face en partie schématique, d'un générateur électromagnétique 10,
construit conformément à un premier mode de réalisation de la présente
invention, d'inclure un aimant permanent 12 pour fournir des lignes
d'entrée de flux magnétique qui passent du pôle nord 14 de l'aimant 12,
vers l'extérieur dans le chemin de flux magnétique matériau de base 16.
Le matériau d'âme 16 de trajet de flux est
configuré pour former un chemin magnétique 18 droite et gauche d'un
chemin magnétique 20, à la fois de l'extérieur qui s'étendent entre le
pôle nord 14 et le pôle sud 22 de l'aimant 12.
Le générateur électromagnétique 10 est entraîné
par l'intermédiaire d'un circuit de commutation et de commande 24, qui
entraîne en alternance le courant électrique à travers une bobine d'entrée de
droite 26 et une bobine d'entrée gauche 28. Ces bobines d'entrée s'étendent chacun autour
d'une partie de la matière de noyau 16, avec l'bobine d'entrée droite 26
entourant une partie du trajet magnétique droit 18 et avec la bobine
d'entrée de gauche 28 entourant une partie du trajet magnétique gauche 20
a de la bobine de sortie droit 29 entoure également une partie du
trajet magnétique de droite 18, tandis qu'une sortie gauche bobine 30
entoure une partie de la trajectoire magnétique gauche 20.
Selon une version préférée de la présente
invention, le circuit de commutation et de commande 24 et les bobines d'entrée
26, 28 sont disposés de telle sorte que, lorsque la bobine d'entrée à
droite 26 est excitée, un pôle magnétique nord est présente, à son
extrémité gauche 31, l'extrémité la plus proche du pôle nord 14 de
l'aimant permanent 12, et de sorte que, lorsque la bobine d'entrée de
gauche 28 est excitée, un pôle magnétique nord est présente, à son
extrémité droite 32, qui est aussi l'extrémité la plus proche du pôle
nord 14 de l'aimant permanent 12.
Ainsi, lorsque la bobine d'entrée de droite 26 est aimanté, le
flux magnétique de l'aimant permanent 12 est repoussée à partir de
l'extension à travers la bobine d'entrée de droite 26 de même, lorsque
la bobine d'entrée de gauche 28 est aimanté, le flux magnétique à partir
de la l'aimant permanent 12 est repoussée à partir de l'extension à
travers la bobine d'entrée de gauche 28.
Ainsi, on voit que la conduite de courant
électrique à travers la bobine d'entrée 26 droit s'oppose à une
concentration de flux de l'aimant permanent 12 à l'intérieur du circuit
magnétique 18 à droite, ce qui provoque au moins une partie de ce flux
doit être transférée vers le chemin magnétique gauche 20. d'autre part, la conduite de courant
électrique à travers la bobine d'entrée de gauche 28 est opposée à une
concentration de flux de l'aimant permanent 12 dans le trajet magnétique
de gauche 20, ce qui provoque au moins une partie de ce flux doit être
transférée vers le chemin magnétique droit 18.
Alors que dans l'exemple de la Fig.1,
l'entrée bobines 26, 28 sont placés de part et d'autre du pôle nord de
l'aimant permanent 12, est disposé le long d'une portion de l'âme 16 s'étendant
depuis le pôle nord de l'aimant permanent 12, il est entendu que
l'entrée bobines 26, 28 pourrait tout aussi bien être placés
alternativement de chaque côté du pôle sud de l'aimant permanent 12, est
disposé le long d'une portion de l'âme 16 s'étendant à partir du pôle
sud de l'aimant permanent 12, avec les bobines d'entrée 26, 28 étant
raccordés pour former, lorsqu'elles sont excitées, des champs magnétiques ayant
des pôles sud dirigés vers le pôle sud de l'aimant permanent 12. En général, les bobines d'entrée 26, 28 sont
disposées le long du noyau magnétique de part et d'autre d'un extrémité de
l'aimant permanent formant un premier pôle, par exemple comme un pôle nord,
avec les bobines d'entrée étant agencé pour produire des champs magnétiques de
la polarité du premier pôle dirigé vers le premier pôle de l'aimant permanent.
En outre, selon une version préférée de la présente
invention, l'entrée les bobines 26, 28 sont donc jamais entraîné avec le
courant que la matière de noyau 16 se sature plus. Conduire le matériau de base de 16 à
saturation signifie que les augmentations ultérieures de courant d'entrée peut
se produire sans effectuer des changements correspondants dans le flux
magnétique, et donc que la puissance d'entrée peuvent être gaspillé. De cette manière, l'appareil de la présente
invention est muni d'un avantage en termes de l'utilisation efficace de la
puissance d'entrée sur l'appareil du brevet US n ° 4.000.401, dans lequel une
partie des deux extrémités de chaque circuit magnétique est amené à saturation
pour bloquer écoulement de flux.
Dans le générateur électromagnétique 10, la
commutation de la circulation du courant dans les bobines d'entrée 26, 28 n'a
pas besoin d'être suffisante pour arrêter l'écoulement du flux dans l'un des
chemins magnétiques 18, 20, tout en favorisant la circulation du flux
magnétique dans l'autre magnétique chemin.
Le générateur électromagnétique 10 œuvres de changer le modèle de
flux; il n'a pas besoin d'être complètement commuté d'un côté à l'autre.
Des expériences ont déterminé que cette
configuration est supérieure, en termes de l'efficacité de l'utilisation de la
puissance à l'intérieur des bobines d'entrée 26, 28 pour produire de
l'énergie électrique dans les bobines de sortie 29, 30, pour la variante
d'agencement des bobines d'entrée et les circuits eux entraînement de telle
sorte que flux de l'aimant permanent est entraîné à travers les bobines
d'entrée tels qu'ils sont sous tension.
Cet agencement de la présente invention fournit un avantage significatif
par rapport aux procédés de l'art antérieur montre, par exemple, dans le brevet
US n ° 4.077.001, dans lequel le flux magnétique est entraînée à travers les
bobines excitées.
La configuration de la présente invention présente
également un avantage par rapport aux configurations de l'art antérieur du
brevet US n °. 3.368.141 et 4.077.001 en ce que le flux magnétique est commuté
entre deux chemins alternatifs magnétiques 18, 20 avec seulement une
bobine d'entrée unique 26, 28 entourant chacun des chemins magnétiques
alternés. Les configurations des brevets
US n °. 3,368,141 et 4,077,001 nécessitent chacun deux bobines d'entrée sur
chacun des trajets magnétiques. Cet
avantage de la présente invention est importante à la fois dans la
simplification du matériel et en augmentant l'efficacité de conversion de
puissance.
La bobine de sortie droit 29 est relié
électriquement à un redresseur et un filtre 33, dont une sortie est
commandé par un régulateur 34, qui fournit une tension de sortie
réglable à l'aide d'un potentiomètre 35.
La sortie du régulateur linéaire 34 est à son tour fourni en tant
que une entrée de détection et un circuit de commutation 36. Sous des conditions de démarrage, le circuit
de détection et de commutation 36 connecte le circuit de commutation et
de commande 24 à une source d'alimentation externe 38, qui est,
par exemple, une batterie de démarrage.
Après que le générateur électromagnétique 10 est correctement
lancé, le circuit de détection et de commutation 36 détecte que la
tension disponible à partir de régulateur 34 a atteint un niveau
prédéterminé, de sorte que la puissance d'entrée du circuit de commutation et
de commande 24 est commutée à partir de la source d'alimentation externe
de 38 à la sortie du régulateur 34 Après cette commutation se
produit, le générateur électromagnétique 10 continue à fonctionner sans
application d'une force externe.
La bobine de sortie de gauche 30 est reliée
électriquement à un redresseur et un filtre 40, dont la sortie est
reliée à un régulateur 42, la tension de sortie est réglée au moyen d'un
potentiomètre 43. La sortie du
régulateur 42 est relié à son tour à une charge extérieure 44.
Fig.2 est une vue schématique d'une première version du
circuit de commutation et de contrôle 24. Un oscillateur 50 entraîne l'entrée
d'horloge d'une bascule 54, avec le Q et sorties Q 'de la bascule 54 étant
relié par pilote les circuits 56, 58 de transistors de puissance 60,
62 de sorte que l'entrée de bobines 26, 28 sont entraînés en
alternance. Selon une version préférée
de la présente invention, la tension V appliquée aux bobines 26, 28 à
travers les FET 60, 62 est dérivée de la sortie du circuit de détection
et de commutation 36.
Fig.3 est une représentation graphique des signaux de
commande aux portes de transistors FET 60, 62 de la Fig.2, avec
la tension de commande de la grille FET 60 étant représenté par la ligne
64, et avec la tension d'attaque FET 62 étant représenté par la
ligne 66. deux bobines 26, 28 sont
entraînées par des tensions positives.
Fig.4 est une vue schématique d'une deuxième version du
circuit de commutation et de contrôle 24. Dans cette version, un oscillateur 70 entraîne
l'entrée d'horloge d'une bascule 72, avec le Q et sorties Q 'de la
bascule 72 étant connectée pour servir de déclencheurs pour une coups 74,
76. Les sorties des monostables 74,
76 sont à leur tour reliés par des circuits de commande 78, 80 pour
entraîner FET 82, 84, de sorte que les bobines d'entrée 26, 28 sont
alternativement conduit avec des impulsions plus courtes en durée que le Q et
sorties Q' de la bascule 72.
Fig.5 est une représentation graphique des signaux de
commande aux portes de transistors FET 82, 84 de la Fig.4, avec
la tension de commande de la grille FET 82 étant représenté par la ligne
86, et avec la tension de commande de la grille FET 84 étant
représenté par la ligne 88.
En se référant à nouveau à la Fig.1,
l'énergie est générée dans la bobine de sortie de droite 29 uniquement
lorsque le niveau de flux magnétique se modifie dans le droit chemin magnétique
18, et dans la bobine de sortie 30 à gauche uniquement lorsque le
niveau de flux magnétique se modifie dans l'gauche chemin magnétique 20 Il
est donc souhaitable de déterminer, pour une configuration de générateur
magnétique spécifique, la largeur d'une impulsion fournissant le changement
pratique le plus rapide dans le flux magnétique, et ensuite à fournir cette
largeur d'impulsion, soit en faisant varier la fréquence de l'oscillateur 50
de l'appareil de la Fig.2, de sorte que cette largeur d'impulsion
est fourni avec les signaux représentés sur la Fig.3, ou par variation
de la constante de temps des monostables 74, 76 de la Fig.4, de
sorte que cette largeur d'impulsion est fourni par les signaux de la Fig.5
à une fréquence de l'oscillateur basse.
De cette façon, les bobines d'entrée ne sont pas laissées sur plus
longtemps que nécessaire. Lorsque l'une
des bobines d'entrée est laissé pendant une période de temps plus longue que
celle nécessaire pour produire le changement de direction du flux, l'énergie
est gaspillée par chauffage à l'intérieur de la bobine d'entrée sans production
supplémentaire d'énergie dans la bobine de sortie correspondant.
Un certain nombre d'expériences ont été menées pour
déterminer la pertinence d'un générateur électromagnétique construit comme le
générateur 10 dans la Fig.1, pour produire de l'énergie à la fois
de conduire la logique de commutation et de contrôle, fournir de l'énergie pour
les bobines d'entrée 26, 28, et à conduire une charge externe 44 dans
la configuration utilisée dans cette expérience, l'entrée les bobines 26, 28
avaient 40 spires de fil de cuivre de calibre 18, et les bobinages de
sortie 29, 30 a 450 tours de fil de cuivre de calibre 18. L'aimant permanent 12 a une hauteur de
40 mm. Entre ses pôles nord et sud, dans
le sens de la flèche 89, une largeur de 25,4 mm. Dans le sens de la flèche 90, et dans
l'autre direction, une profondeur de 38,1 mm.
l'âme 16 a une hauteur, dans le sens de la flèche 89, de
90 mm, une largeur, dans le sens de la flèche 90, de 135 mm et une
profondeur de 70 mm. L'âme 16 avait
un trou central avec une hauteur, dans le sens de la flèche 89, de 40 mm
pour accueillir l'aimant 12, et une largeur , dans le sens de la flèche 90,
de 85 mm. L'âme 16 a été fabriqué
en deux moitiés en forme de "C", est entré au niveau des lignes 92,
pour recevoir l'enroulement de sortie des bobines 29, 30 et les bobines
d'entrée 26 , 28 sur le matériau de base.
Le matériau de base était un alliage magnétique à
base de fer laminé vendu par Honeywell comme alliage magnétique 2605SA1
Metglas. Le matériau magnétique est une
combinaison de fer, de néodyme et bore.
Les bobines d'entrée 26, 28 sont entraînées à une fréquence de
l'oscillateur de 87,5 KHz, qui a été déterminée pour produire une efficacité
optimale en utilisant un circuit de commutation de commande configurée comme
montré sur la Fig.2. Cette
fréquence a une période de 11,45 microsecondes.
La bascule 54 est disposé, par exemple, être fixé et
réinitialiser sur les fronts montants de l'entrée de signal d'horloge provenant
de l'oscillateur, de sorte que chaque impulsion de commande un des FET 60,
62 a une durée de 11,45 microsecondes, et de sorte que séquentiel impulsions
sont également séparés pour chaque FET sont également séparés par 11,45
microsecondes.
Fig.6A à Fig.6H, sont des vues
graphiques des signaux qui sont produits simultanément pendant l'opération de
l'appareil représenté sur la Fig.1 et la Fig.2, lorsque la
tension d'entrée appliquée était de 75 volts.
Fig.6A représente un premier signal de commande 100 conduite
FET 60, qui mène à conduire la bobine d'entrée droite 26. Fig.6B représente un deuxième signal
de commande 102, conduite FET 62, qui, quand elle mène, fournit
le lecteur à l'entrée gauche bobine 28.
Fig.6C et Fig.6D
montrent des signaux de courant et de tension produite lors de l'entraînement
du courant des transistors FET 60, 62 est fournie par une source de
batterie. Fig.6C illustre le
niveau de tension de 104 V. Bien que la
tension nominale de la batterie est de 75 volts, un signal transitoire
décomposition 106 est superposée à la tension présente à chaque fois que
l'un des transistors FET 60, 62 est mise en marche. Le motif spécifique de ce signal transitoire
dépend de la résistance interne de la batterie, ainsi que d'un certain nombre
de caractéristiques du générateur magnétique 10. De même, Fig.6D montre le courant 106
circulant dans les FET 60, 62 à partir de la source de
batterie. Comme les signaux 104, 106 montrent
les effets du courant circulant dans les deux FET 60, 62 les pointes
transitoires sont 11,45 microsecondes de l'autre.
Figs.6E à 6H, correspond à la
tension et de courant mesurées sur les bobines de sortie 29, 30. Fig.6E représente un signal de sortie
de tension 108 de la bobine de sortie de droite 29, tandis que Fig.6F
représente un signal de sortie de tension 110 de la gauche bobine de
sortie 30, par exemple, le signal de courant de sortie 116 de la
bobine de sortie droit 29 comprend un premier pic transitoire 112 causée
lorsqu'une impulsion de courant est générée dans la bobine d'entrée de gauche 28,
afin de renforcer le flux magnétique passant par la droite magnétique chemin 18,
et un second pic transitoire 114 causé lorsque l'entrée gauche bobine 28
est coupée comme la bobine d'entrée droite 26 est mis sous
tension. Fig.6G montre un signal
de courant de sortie 116 de la bobine de sortie de droite 29,
tandis que Fig.6H montre un signal de courant de sortie 118 de la
bobine de sortie gauche 30.
Fig.7 est une représentation graphique de la puissance de
sortie mesurée à l'aide du générateur électromagnétique 10 et huit niveaux de
tension d'entrée, allant de 10V à 75V.
La fréquence de l'oscillateur est maintenu à 87,5 KHz. Les valeurs mesurées sont représentées par
les points 120, tandis que la courbe 122 est généré par
régression polynomiale, (a moindres carrés).
Fig.8 est une représentation graphique d'un coefficient
de rendement, défini comme le rapport de la puissance de sortie à la puissance
d'entrée, pour chacun des points de mesure représentés sur la Fig.7. A chaque point de mesure, la puissance de
sortie est nettement supérieure à la puissance d'entrée. Mesures de puissance réel ont été calculées à
chaque point de données à l'aide tension mesurée et les niveaux actuels, les
résultats étant en moyenne sur la période du signal. Ces mesures sont d'accord avec la puissance
RMS mesurée à l'aide d'un oscilloscope numérique Textronic THS730.
Bien que le générateur électromagnétique 10 est
capable de fonctionner à des tensions et des courants beaucoup plus élevés,
sans saturation, la tension d'entrée est limitée à 75 volts en raison des
limites de tension des circuits de commutation étant utilisés. Ceux qui sont familiers avec l'électronique
comprendra que les composants des circuits capables de gérer des tensions plus
élevées de commutation sont disponibles pour une utilisation dans cette
application.
Les données expérimentales mesurées ont été
extrapolées à prévoir un fonctionnement à une tension d'entrée de 100 volts, le
courant d'entrée étant de 140 mA, la puissance d'entrée est de 14 watts et une
puissance de sortie résultante étant de 48 watts pour chacune des deux bobines
de sortie 29 , 30, à un courant de sortie moyenne de 12 mA et une
tension de sortie moyenne de 4000 volts.
Cela signifie que pour chacune des bobines de sortie 29, 30, le
coefficient de performance ("COP") serait de 3,44.
Bien que la tension de sortie de 4000 volts peut
être nécessaire pour certaines applications, la tension de sortie peut
également être modifiée au moyen d'un simple changement de la configuration du
générateur électromagnétique 10.
La tension de sortie est facilement réduit en réduisant le nombre de
spires dans les enroulements de sortie.
Si ce nombre de tours est diminué de 450 à 12, la tension de sortie est
tombée à 106,7, avec une augmentation résultante de la sortie de courant de 0,5
ampères pour chaque bobine de sortie 29, 30, (53 watts par
exemple). De cette manière, le courant
de sortie et la tension du générateur électromagnétique peut faire varier en
faisant varier le nombre de spires des bobines de sortie 29, 30, sans
effectuer de modification importante dans la puissance de sortie, qui est
plutôt déterminée par le courant d'entrée, qui détermine la quantité de flux
magnétique la navette au cours du processus de commutation.
Tous les coefficients de performance sont significativement supérieur à
1. Celles-ci sont
représentées sur la Fig.8 et ils indiquent que les niveaux de puissance
de sortie mesurés dans chacune des bobines de sortie 29, 30 sont
sensiblement plus grandes que les niveaux de puissance d'entrée correspondant
d'entraînement à la fois de l'bobines d'entrée 26, 28. Par conséquent, il est évident que le générateur
électromagnétique 10 peut être construit dans une forme auto-alimenté,
comme il est indiqué ci-dessus en référence à la Fig.1. Dans l'exemple de la Fig.1, sauf pour
une brève application de la puissance de la source d'alimentation externe 38
pour démarrer le processus de production d'énergie, la puissance nécessaire
pour conduire l'entrée bobines 26, 28 est dérivé entièrement de
puissance développée dans la sortie droite la bobine 29. Si la puissance générée dans la bobine de
sortie unique 29, est plus que suffisant pour entraîner les bobines
d'entrée 26, 28, une charge supplémentaire 126 peut être ajouté
pour être entraîné par l'énergie générée dans la bobine de sortie 29 d'autre
part, chacun des enroulements de sortie 29, 30 peut être utilisé pour
entraîner une partie des besoins en énergie de la bobine d'entrée, par exemple,
des bobines de sortie 26 peuvent fournir la tension de commande V pour
FET 60 tandis que la bobine de sortie 28 peut fournir la tension
de commande V pour FET 62.
En ce qui concerne les considérations
thermodynamiques, il est à noter que lorsque le générateur électromagnétique 10
est en fonctionnement, il est un système ouvert pas en équilibre
thermodynamique. Le système reçoit de
l'énergie statique du flux magnétique de l'aimant permanent. Étant donné que le générateur
électromagnétique 10 est auto-commuté sans un apport d'énergie
supplémentaire, le fonctionnement thermodynamique du système est un système
dissipatif ouvert, la réception, la collecte et dissiper l'énergie de son
environnement; dans ce cas, à partir du flux magnétique stockée à l'intérieur
de l'aimant permanent. La poursuite du
fonctionnement du générateur électromagnétique 10 causes de
démagnétisation de l'aimant permanent.
L'utilisation d'un matériau magnétique comprenant des éléments de terres
rares, par exemple un matériau de samarium cobalt ou un matériau contenant du
fer, du néodyme et bore est préférable dans la présente invention, car un tel
matériau magnétique a une relativement longue durée de vie dans la présente
demande.
Ainsi, un générateur électromagnétique fonctionnant
conformément à la présente invention ne doit pas être considéré comme une
machine à mouvement perpétuel, mais plutôt comme un système dans lequel les
flux rayonné à partir d'un aimant permanent est convertie en électricité, qui
est utilisée à la fois pour alimenter l'appareil et pour alimenter une charge
externe. Ceci est analogue à un système
comprenant un réacteur nucléaire, dans lequel un certain nombre de barres de
combustible émettre de l'énergie qui est utilisée pour maintenir la réaction en
chaîne en cours et pour chauffer l'eau pour la production d'électricité pour
conduire des charges externes.
Fig.9 est une vue en élévation en coupe transversale
d'un générateur électromagnétique 130 construit conformément à une
seconde version du premier mode de réalisation de la présente invention. Ce générateur électromagnétique 130 est
généralement similaire à la construction et au fonctionnement du générateur
électromagnétique 10 construit conformément à la première version de ce
mode de réalisation, sauf que le noyau magnétique 132 du générateur
électromagnétique 10 est construit en deux moitiés assemblées le long
des lignes 134, permettant à chaque des bobines de sortie 135 pour
être enroulée sur une bobine en matière plastique 136 avant d'être
placés sur les jambes 137 de l'âme 132.
Fig.9 montre également une variante de mise en place
d'une bobine d'entrée 138. Dans
l'exemple de la Fig.1, les deux bobines d'entrée 26, 28 ont été
placés sur la partie supérieure du noyau magnétique 16, ces bobines
étant configurées pour générer magnétique domaines ayant des pôles magnétiques
nord aux extrémités intérieures 31, 32 des bobines 26, 28, avec
ces pôles nord magnétique étant ainsi plus proche de la fin 14 de
l'aimant permanent 12 ayant son pôle nord magnétique. Dans l'exemple de la Fig.9, une
première bobine d'entrée 26 est tel que décrit ci-dessus en référence à
la Fig.1, mais le deuxième enroulement d'entrée 138 est placé à
côté du pôle sud 140 de l'aimant permanent 12 de ce bobinage
d'entrée 138 est configuré pour générer un pôle sud magnétique à son
extrémité interne 142, de sorte que, lorsque la bobine d'entrée 138 est
mis sous tension, le flux de l'aimant permanent 12 est orienté à l'opposé
de la trajectoire magnétique gauche 20 dans le trajet magnétique droit 18.
Fig.10 et la Fig.11 montrent un générateur
électromagnétique 150 construit conformément à une première version d'un
second mode de réalisation de la présente invention, avec la Fig.10
étant une vue de dessus, et la Fig.11 est une vue en élévation
frontale. Ce générateur
électromagnétique 150 comprend une bobine de sortie 152, 153 à
chaque coin, et un aimant permanent 154 qui s'étend le long de chaque
côté entre les bobines de sortie. Le
noyau magnétique 156 comprend une plaque supérieure 158, une
plaque inférieure 160, et un poste carré 162 qui s'étend à
l'intérieur de chaque bobine de sortie 152, 153 la fois la plaque
supérieure 158 et la plaque inférieure 160 comprend des ouvertures
centrales 164.
Chacun des aimants permanents 154 est
orienté avec un pôle comme, par exemple comme un pôle nord, contre la plaque
supérieure 158. huit bobines d'entrée 166, 168 sont placés dans
des positions autour de la plaque supérieure 158 entre une bobine de
sortie 152, 153 et un permanent.
Chaque aimant 154 de la bobine d'entrée 166, 168 est
agencé pour former un pôle magnétique au niveau de son extrémité la plus proche
de l'aimant permanent adjacent 154 de la même polarité que les pôles
magnétiques des aimants 154 au voisinage de la plaque supérieure 158. Ainsi, l'entrée des bobines 166 sont
mises sous tension pour dévier le flux magnétique des aimants permanents 154
des bobines de sortie adjacents 152, dans les chemins magnétiques à
travers les bobines de sortie 153.
Puis, les bobines d'entrée 168 sont activés pour dévier le flux
magnétique des aimants permanents 154 de la adjacent bobines de sortie 153,
avec ce flux étant déviés dans des chemins magnétiques à travers les bobines de
sortie 152. Ainsi, les
bobines d'entrée forment un premier groupe d'entrée bobines 166 et un
deuxième groupe d'entrée bobines 168, avec ces premier et deuxième
groupes de bobines d'entrée étant alternativement sous tension de la manière
décrite ci-dessus en référence à la Fig.1 pour les bobines d'entrée
individuelles 26, 28. Les bobines
de sortie produisent un courant dans le premier train d'impulsions se
produisant simultanément à l'intérieur des bobines 152 et dans un
deuxième train d'impulsions se produisant simultanément à l'intérieur des
bobines 153.
Ainsi, le courant d'entraînement à travers les
bobines d'entrée 166 provoque une augmentation du flux des aimants
permanents 154, dans les postes 162 s'étendant à travers des
bobines de sortie 153 et une diminution de flux des aimants permanents 154
à l'intérieur des postes 162 s'étendant à travers des bobines de
sortie 152. D'autre Par contre,
en cours d'entraînement par l'intermédiaire des bobines d'entrée 168 provoque
une diminution de flux des aimants permanents dans les postes 154 162 s'étendant
à travers des bobines de sortie 153 et une augmentation du flux des
aimants permanents dans les postes 154 162 s'étendant à travers des
bobines de sortie 152.
Bien que l'exemple de la Fig.10 et la Fig.11
représente l'ensemble des bobines d'entrée 166,168 déployés le long de
la plaque supérieure 158, il est entendu que certaines de ces bobines
d'entrée 166, 168 pourrait alternativement être déployés autour de la
plaque inférieure 160, de la manière généralement représenté sur la Fig.9,
avec une bobine d'entrée 166, 168 étant à l'intérieur de chaque circuit
magnétique entre un aimant permanent 154 et un poteau adjacent 162 s'étendant
à l'intérieur d'une bobine de sortie 152, 153, et à chaque bobine
d'entrée 166, 168 étant agencée de manière à produire un champ
magnétique ayant un pôle magnétique comme le pôle le plus proche de l'aimant
permanent adjacent 154.
Fig.12 est une vue de dessus d'une deuxième version 170
du deuxième mode de réalisation de la présente invention, qui est similaire
à la première version de celui-ci, qui a été discuté en référence à la
Fig.10 et la Fig.11, à l'exception que d'une plaque supérieure 172
et une plaque inférieure similaire (non représenté) sont de forme
annulaire, tandis que les aimants permanents et 174 postes 176 s'étendant
à travers les bobines de sortie 178 sont cylindriques. Les bobines d'entrée 180 sont orientés
et sont passés comme décrit ci-dessus en référence à la Fig.9 et la Fig.10.
Bien que l'exemple de la Fig.12 montre
quatre aimants permanents, quatre bobines de sortie et d'entrée de huit
bobines, il est entendu que les principes décrits ci-dessus peuvent être
appliqués aux générateurs électromagnétiques ayant des nombres différents
d'éléments. Par exemple, un tel
dispositif peut être construit pour avoir deux aimants permanents, deux bobines
de sortie, et les quatre bobines d'entrée, ou d'avoir six aimants permanents,
six bobines de sortie, et les douze bobines d'entrée.
Conformément à la présente invention, la matière
utilisée pour les noyaux magnétiques est de préférence un alliage
nanocristallin, et alternativement un alliage amorphe. Le matériau est de préférence sous une forme
stratifiée. Par exemple, le matériau de
noyau est un alliage cobalt-niobium-bore ou d'un alliage magnétique à base de
fer.
En outre, conformément à la présente invention, le
matériau d'aimant permanent comprend de préférence un élément de terre
rare. Par exemple, le matériau d'aimant
permanent est un matériau de cobalt de samarium ou une combinaison de fer, de
néodyme et bore.
DAN DAVIDSON: ACOUSTIQUE -
MAGNÉTIQUE GÉNÉRATEUR DE PUISSANCE
Brevet US 5.568.005 22 Octobre 1996 Inventeur: Dan A. Davidson
ACOUSTIQUE -
MAGNÉTIQUE GÉNÉRATEUR DE PUISSANCE
S'il vous plaît noter que
ceci est un extrait reformulé de ce brevet. Ce brevet décrit un dispositif
électrique très similaire au dispositif MEG, capable de lui-même la mise sous
tension pendant la mise sous tension d'autres éléments de l'équipement.
RÉSUMÉ
Le générateur de puissance
du champ magnétique acoustique utilise un signal acoustique de se concentrer
dans un aimant permanent pour stimuler la structure nucléaire de l'aimant à
causer le champ magnétique de l'aimant permanent à déplacer ou à osciller. Cet effet peut être utilisé pour taper la
puissance du champ magnétique oscillant en mettant une bobine de fil dans le
champ oscillant. Quand un générateur de
signal alternatif de courant est connectée simultanément à un transducteur acoustique
et une bobine de stimulation ; grâce à quoi, à la fois le transducteur
acoustique et la bobine de stimulation sont situés dans le champ magnétique de
l'aimant, le signal acoustique augmente l'effet stimulant de l'aimant permanent
du transformateur. Le transducteur
acoustique peut être n'importe quel dispositif de génération acoustique tel
qu'un piézo-électrique, magnétostrictif ou tout autre transducteur
acoustique. L'effet combiné du signal
acoustique et la bobine de stimulation augmente l'efficacité de l'aimant
d'induction transformateurs permanents.
CONTEXTE DE
L'INVENTION
La présente invention
concerne un générateur électrique à l'état solide ne comportant pas de pièces
en mouvement. Plus particulièrement,
l'invention met en oeuvre un nouveau procédé de stimulation de la matière
nucléaire d'un aimant permanent de sorte que la structure électronique de
l'atome se met à vibrer et ainsi provoquer le champ magnétique de l'aimant
permanent pour faire osciller. C'est un
fait bien connu que un champ magnétique oscillant va induire un courant
électrique dans une bobine comme cela a été découvert par Michael Faraday au
siècle dernier. Ce qui est nouveau dans
cette invention, est la découverte de la capacité d'un champ acoustique pour
stimuler la structure nucléaire d'un matériau à provoquer les électrons à
vaciller sous l'influence du champ acoustique.
Si le matériau est magnétique ou magnétisée temporairement par un champ
magnétique externe, le champ magnétique se met à vibrer sous l'impulsion du
champ acoustique. Si cet effet est associé à une bobine qui
stimule simultanément l'aimant alors l'efficacité de la stimulation du champ de
l'aimant permanent est améliorée. Si une bobine
de détection est placé dans le champ magnétique oscillant de manière à créer un
transformateur d'induction puis la combinaison de la stimulation acoustique et
magnétique va améliorer l'efficacité du transformateur à induction.
La technique le plus
pertinent connu de l'inventeur comprend le brevet US. N ° 4904926 (1990) de
Mario Pasichinsky, Magnet intitulé Générateur de mouvement électrique; et le
brevet des Etats-Unis. N ° 4077001 (1978) de Frank Richardson, intitulé
Converter électromagnétique Avec stationnaires Membres à réluctance variable;
et le brevet des Etats-Unis. N ° 4006401 (1977) à De Rivas, intitulé générateur
électromagnétique.
Les références
ci-dessus à Pasichinsky, Richardson, et de Rivas, tous utilisent des méthodes
inductives pour stimuler le mouvement d'un champ magnétique permanent. Dans l'invention de Rivas, " générateur
électromagnétique ", le flux de l'aimant permanent est " en
alternance en passant " par couplage inductif. Dans la description Richardson un "
système de conversion d'énergie " le flux de l'aimant permanent est
également " décalé " par des moyens inductifs. Dans la description Pasichinsky, alternant
des bobines magnétiques induisent des changements de flux dans un circuit de
bobines magnétiques fermés et sortie connectés au circuit sont induits par la
variation du flux à produire un champ magnétique. Tous ces dispositifs sont essentiellement des
variantes de conception du transformateur avec des aimants permanents en tant
que partie des noyaux de transformateurs et utilisent tous induction
magnétique. L'aspect du transformateur
de ces références est l'utilisation d'aimants permanents en tant que noyau du
transformateur avec des bobines enroulées autour du noyau magnétique, qui sont
mis sous tension pour produire un mouvement d'oscillation ou de champ de
l'aimant permanent. Les références ci-dessus seront, dans ce
document, sont appelés " les transformateurs à aimants permanents ".
Autre technique pertinent pour l'invention sont le brevet US. N °
2101272 (1937) de HJ Scott, intitulé combinée Magnétostriction et
piézoélectrique dispositif sélectif; et le brevet des Etats-Unis. N ° 2636135
(1953) de RL Peek, Jr. stress intitulé couplé de base et transformateur de
Cristal, et US. N ° 2834943 (1958) à RO Grisdale, Etal droit couplé
mécaniquement électromécanique et magnétomécaniques transducteurs, et US. N °
3246287 (1966) de HF Benson droit piézoélectrique transformateur, et US. N °
3261339 (1966) de HP Quinn droit Magnétostrictif transformateur, et US. N °
3274406 (1966) de HS Sommers, Jr. droit dispositif électromagnétique
acoustique, et US. N ° 3309628 (1967) de FA Olson droit YIG acoustique Ligne
Variable Delay, et US. N ° 3457463 (1969) de L. Balamuth Méthode et appareil
pour intitulé générer des courants électriques de faible amplitude, et US. N °
4443731 (1984) de Butler et al. intitulé Hybrid piézoélectriques et magnétostrictifs
onde acoustique du transducteur, et US. N ° 4552071 (1985) pour RB Thompson
Méthode et appareil pour intitulé Mesurer Stress.
La mention de PEEK précité, tire parti de la
différence de fonctionnement de cristaux piézoélectriques et magnétostrictifs
pour produire une réponse lorsqu'il est stimulé à une par l'autre. Le brevet de Peek ne pas utiliser une onde
acoustique à stimuler un aimant permanent dans la présente invention.
La référence à Sommers cité ci-dessus, est un
transducteur qui utilise une barre conductrice ou un tube, qui prend en charge
les ondes hélicon relativement lents, placé à côté d'un cristal
piézo-électrique ou magnétostrictif. Le
capteur est conçu de manière à améliorer une ou l'autre de l'onde acoustique ou
l'onde électrique par l'interaction de ces deux matériaux. Le brevet Sommers ne pas utiliser une onde
acoustique à stimuler un aimant permanent pour améliorer à oscillation du champ
magnétique de la présente invention fait.
La référence à Balmuth cité ci-dessus, utilise de
résonance mécanique roseaux, de tiges, ou des chambres, qui sont couplés à des
transducteurs piézoélectriques qui sont, magnétostrictifs, ou à
transistor. Le signal électrique de
sortie des transducteurs stimule un circuit électrique lorsque le résonateur
acoustique et reçoit de l'énergie de plus ne pas utiliser une onde acoustique
pour stimuler un aimant permanent afin d'améliorer à oscillation du champ
magnétique de la présente invention le fait.
La référence à Olson cité ci-dessus, utilise un
matériau acoustiquement sensible tel qu'un piézo-électrique ou un
magnétostrictif pour agir comme une ligne à retard pour les signaux micro-ondes
et à nouveau ne pas utiliser une onde acoustique pour stimuler un aimant
permanent afin d'améliorer à oscillation du champ magnétique la présente
invention ne.
Les références à Benson, Quinn, Grisdale, Scott, et
Butler précité, sont tous concernés par des transducteurs acoustiques qui
transforment la pression acoustique en un signal électrique ou vice versa en
utilisant uniquement le piézoélectrique et / ou l'effet magnétostrictif. Le brevet Benson est un transformateur
acoustique sous-marin, qui convertit des ondes acoustiques en appuyant sur un
transducteur dans un champ électromagnétique qui excite un transformateur. Le brevet Quinn utilise un effet
magnétostrictif à stimuler cristaux piézo-électriques à haute tension, une
sortie qui est un inverse du brevet Benson.
Le brevet Grisdale utilise piézoélectrique empilés mécaniquement ou
cristaux magnétostrictifs pour produire un gyrateur mécanique plus
efficace. Les utilisations de brevets
Scott et oscillateur électrique pour stimuler tiges magnétostrictifs qui
mettent la pression sur les cristaux piézo-électriques à la sortie une tension
élevée des cristaux piézoélectriques. Le
brevet Butler utilise un effet combiné de cristaux piézoélectriques et
magnétostrictifs pour produire un détecteur d'énergie acoustique améliorée.
La référence au nom de Thompson cité ci-dessus,
utilise un transducteur magnétique permanent pour induire des courants de
Foucault dans le métal qui se trouve dans le champ du capteur ou des
utilisations en mouvement des courants de Foucault dans une pièce de métal à
stimuler un champ magnétique.
L'induction de courants de Foucault est le résultat d'un champ
magnétique oscillant produit dans le transducteur.
Aucune des références
citées ci-dessus, l'utilisation d'une onde acoustique à stimuler les atomes
d'un aimant permanent et par conséquent ne sont pas liés à la présente
invention.
RESUME DE L'INVENTION
Un objet de la présente
invention est de fournir un générateur d'énergie sans parties mobiles.
Un autre objet de cette
invention est d'utiliser un champ acoustique pour stimuler le niveau nucléaire
de la matière magnétique et de fournir un procédé consistant à faire osciller
le champ magnétique d'aimants permanents.
Un autre objet de la
présente invention est de fournir un procédé simple de production d'énergie
électrique en incluant un transducteur piézoélectrique qui est utilisé pour
faire vibrer le champ magnétique d'un aimant permanent. Lorsque le noyau de l'atome est mis en
vibration par le piézo-électrique, à son tour, fait vibrer la structure
électronique de l'ensemble des atomes.
Etant donné que la structure électronique est la base du champ
magnétique de l'aimant alors l'ensemble du champ magnétique de l'aimant vibre
lorsque la structure électronique est mis en vibration. Les bobines placées dans le champ magnétique
vibrant auront tension et le courant induit dans les.
Il est un fait bien
établi, que lorsque le champ magnétique d'un aimant permanent est mis en
vibration, il est possible de générer un courant alternatif dans l'enroulement
d'une bobine placée dans le champ magnétique vibrant. Quelle est la particularité de cette invention,
est d'accroître l'efficacité des transformateurs à aimants permanents en
utilisant une stimulation acoustique de la piézoélectricité pour stimuler
davantage l'aimant permanent de manière à ajouter des effets inductifs des
transformateurs à aimants permanents. La
présente invention fait en stimulant les noyaux d'aimant permanent de
transformateurs d'aimants permanents avec un champ acoustique généré par un
générateur acoustique piézoélectrique active ou autre, qui est mis en vibration
à la même fréquence que l'induction électrique des transformateurs à aimants
permanents.
BREVE
DESCRIPTION DES DESSINS
Fig.1 illustre un
générateur de signal de fréquence fixé à la conduite et un transducteur
piézo-électrique qui se trouve dans la proximité acoustique d'un type d'aimant
permanent à barres avec une bobine de sortie placé dans le champ magnétique de
l'aimant permanent.
Fig.2 illustre un
générateur de signal de fréquence fixé à la conduite et un transducteur
piézo-électrique qui se trouve dans la proximité acoustique de type toroïdal
d'aimants permanents avec un bobinage de sortie enroulée autour de l'aimant
permanent toroïdal.
Fig.3 illustre un
générateur de signal de fréquence fixé à la conduite et un transducteur
piézo-électrique qui se trouve dans la proximité acoustique d'un type de
transformateur toroïdal à aimant permanent et le générateur de signal est
également entraîner la bobine d'entrée du transformateur toroïdal à aimant
permanent.

Fig.4 illustre un
générateur de signal de fréquence fixé à la conduite et les deux
transformateurs toroïdaux de base d'aimants permanents, ainsi qu'un
transducteur acoustique qui se trouve à proximité acoustique des noyaux
toroïdaux.
DESCRIPTION DÉTAILLÉE DE L'INVENTION
Dans la Fig.1,
un générateur de signal de fréquence 6 est reliée à un transducteur
piézo-électrique 1 par des fils 4 et 5 reliées aux surfaces
d'électrodes du transducteur piézo-électrique 2 et 3 respectivement. Le transducteur piézo-électrique 1 est
constitué d'un matériau diélectrique tel que le titanate de baryum ou du
titanate zirconate de plomb ou de tout autre matériau approprié pour le
transducteur acoustique du son et des générateurs à ultrasons. Le transducteur piézo-électrique 1 est
placé à proximité de l'aimant permanent 7 de telle sorte que le champ
acoustique du transducteur piézo-électrique 1 peut irradier dans le
matériau d'aimant permanent. Un
transformateur à aimant permanent montré que la bobine 8 est positionnée
dans le champ magnétique de l'aimant permanent 7 Lorsque le transducteur
piézo-électrique 1 est stimulée par le générateur de fréquence 6
puis une tension et un courant est généré entre les fils de sortie 9 et 10 de
l'aimant permanent transformateur.
Un autre mode de
réalisation de la présente invention est représenté sur la Fig.2 qui est
similaire à la Fig.1, avec un générateur de signal de fréquence
similaire 6 reliée à un matériau piézoélectrique 1 par
l'intermédiaire de fils 4 et 5 reliées aux surfaces d'électrodes du
transducteur piézo-électrique 2 et 3. Le transducteur piézo-électrique 1
est tel que défini ci-dessus, qui est à-dire qu'elle est construite à partir
d'un matériau approprié pour sonique et des générateurs à ultrasons. Le transducteur piézo-électrique 1 est
placé à proximité de l'aimant permanent 11 de sorte que le champ
acoustique du transducteur piézo-électrique 1 peut irradier dans le
matériau d'aimant permanent. Un
transformateur à aimant permanent montré que la bobine 12 est placée
dans le champ magnétique de l'aimant permanent 11 lorsque le
transducteur piézo-électrique 1 est stimulée par le générateur de
fréquence 6 puis une tension et un courant est généré entre les fils de
sortie 13 et 14 de la défini ci-dessus Transforme magnétiquer.
Fig.3 est analogue à
la Fig.1 et la Fig.2 avec un générateur de signal de fréquence 6
relié à un transducteur piézo-électrique 1 par des fils 4 et 5 reliées
aux surfaces des électrodes 2 et 3 du transducteur piézoélectrique. Le transducteur piézo-électrique 1 est
tel que défini dans la description ci-dessus.
Le générateur de signal 6 est également reliée à la bobine
d'entrée 20 du transformateur à aimant permanent défini par la toroïdal
noyau de l'aimant permanent 11, la bobine d'entrée 20 et la
bobine de sortie 19. Le
transducteur piézo-électrique 1 est placé à proximité de l'aimant
permanent 11 de sorte que le champ acoustique du transducteur
piézo-électrique 1 peut irradier dans le matériau d'aimant
permanent. Le transformateur magnétique
défini par 11, 19, et 20 se trouve dans le champ magnétique de l'aimant
permanent 11 et est connecté au générateur de signal de fréquence 6 par
des fils 15 et 16 du générateur de fréquence 6 stimule le
transducteur piézo-électrique 1, qui stimule l'aimant permanent
transformateur par l'intermédiaire du champ acoustique et à la fois le
générateur de signal stimule également la bobine électromagnétique. Une tension et du courant est généré dans la
bobine de sortie 19 et la puissance peuvent être prises à partir des
câbles de sortie 17 et 18 du transformateur magnétique.
Un autre mode de
réalisation de la présente invention, représenté sur la Fig.4, est un
générateur de signal de fréquence 6 d'entraînement d'une paire de
transformateurs d'aimants permanents définis par 26, 35, 27 et 25, 36, 28
respectivement, conduisant également un transducteur piézo-électrique 1. La piézoélectrique transducteur est tel que
décrit ci-dessus. Le générateur de
signal est relié par des fils d'entrée 23 et 24 de la bobine 26 d'entrée
du transformateur d'aimant permanent sur la gauche et à la bobine d'entrée 25
du transformateur sur la droite respectivement. L'autre fil d'entrée 38 du
transformateur de gauche aimant permanent est relié au fil d'entrée restante 39
du transformateur magnétique droit.
La sortie du générateur de signal est en outre raccordée au transducteur
piézo-électrique par l'intermédiaire d'une des connexions 21 et 22 à la
surface de connexion de l'élément piézoélectrique 33 et 34 respectivement. La sortie du transformateur d'aimant
permanent sur la gauche est reliée à une charge 40 par l'intermédiaire
de fils 30 et la sortie du transformateur d'aimant permanent situé sur
la droite est relié à la charge par l'intermédiaire de fils 29. Les fils de sortie restantes 31 et 32 de
la gauche et les transformateurs de bons aimants permanents sont également
connectés à la charge. La charge 40 peut
être n'importe quoi, tel qu'un moteur électrique ou lumières ou d'appareils.
La présente invention
n'est pas limitée aux quatre variantes de l'invention représenté sur les Figures.
1, 2, 3, et 4, car il ya un certain nombre de cascade et techniques de
branchement électrique qui peut être accompli pour amplifier la puissance et à
profiter de l'influence acoustique de la piézo-électrique sur le matériau
magnétique. De même, la présente
invention n'est pas limitée à la configuration du noyau toroïdal, car il peut y
avoir plusieurs types de transformateurs à aimant permanent avec un nombre
quelconque de configurations de noyau et la bobine magnétique qui peut être renforcée
par stimulation acoustique en fonction des exigences de puissance et de sortie
selon les règles de l'électronique et ceux qui sont familiers avec l'état de
l'art dans les transformateurs électriques à aimant permanent.
JOHN BEDINI: CHARGEUR DE BATTERIE
Brevet US 6.545.444 8 avril 2003 Inventeur: John C. Bedini
APPAREIL ET MÉTHODE POUR UTILISANT UN MOTEUR
DE MONOPOLE
POUR CRÉER DES BACK-EMF EN CHARGE BATTERIES
S'il vous plaît noter
que ceci est un extrait reformulé de ce brevet. Il décrit un dispositif
autonome qui peut charger une banque de la batterie ou de la batterie externe.
RÉSUMÉ
Une force
contre-électromotrice du moteur unipolaire et un procédé utilisant un rotor
contenant des aimants toutes de la même polarité et dans un état unipolaire
lorsqu'il est en apposition momentané avec une pièce polaire magnétisée d'un
stator ayant la même polarité, le stator étant constitué d'une bobine avec
trois enroulements: enroulement d'un pouvoir-bobine, un déclencheur-bobinage, et
une reprise à bobinage. La force
contre-électromotrice de l'énergie est redressée à l'aide d'un pont de tension
élevée, ce qui transfère l'énergie EMF de retour à un condensateur à haute
tension pour le stockage dans une batterie de récupération. L'énergie stockée peut être déchargée à
travers la batterie de récupération à travers le moyen d'un interrupteur de
contact de rotor pour un stockage ultérieur.
DESCRIPTION
Domaine
technique:
L'invention concerne de
manière générale la saisie d'une énergie électromagnétique disponible en
utilisant un dispositif et un procédé pour créer une force électromagnétique
("EMF"), puis en utilisant l'énergie stockée disponible pour le
recyclage dans le système sous forme d'énergie stockée. Le procédé de création de force
contre-électromotrice est le résultat d'accouplement / désaccouplement d'une
bobine à une source de tension.
Contexte:
Le fonctionnement des
moteurs magnétiques normales de jour présent, a le pôle de rotor attire le pôle
de stator, ce qui entraîne la production d'énergie mécanique à partir des
aimants du rotor et du volant. Au cours
de cette phase, l'énergie s'écoule depuis le magnétisme à rotor / volant
d'inertie et est stockée sous forme d'énergie cinétique dans la rotation
accrue. Un pôle de rotor en laissant un
pôle de stator et la création d'un état de " glisser " les résultats
de la puissance devant être remis dans la section magnétique par le rotor et le
volant pour surmonter la force de la traînée.
Dans un moteur parfait,
sans friction, le champ de force nette est donc considéré comme " la plus
conservatrice ". Un moteur EMF
plus conservatrice a une efficacité maximale.
Sans énergie supplémentaire continuellement amené au moteur, aucun
travail net peut être fait par le champ magnétique, étant donné que la moitié
du temps le champ magnétique ajoute de l'énergie à la charge (le rotor et le
volant) et l'autre moitié du temps, il soustrait l'énergie à partir de la
charge (le rotor et le volant). Par conséquent, la production totale
d'énergie nette est nulle dans tout processus rotatif tel sans apport d'énergie
supplémentaire. Pour utiliser un moteur
magnétique à jour actuelle, l'énergie continue doit être introduite dans le
moteur pour vaincre la traînée et pour alimenter le moteur et sa charge.
Moteurs et générateurs actuellement en
usage, utiliser tous ces domaines conservateurs et par conséquent, avoir des
pertes internes. Par conséquent, il est
nécessaire d'entrée en permanence toute l'énergie que la sortie du moteur à la
charge, ainsi que plus d'énergie pour couvrir les pertes à l'intérieur du
moteur lui-même. Moteurs de la FEM sont
conçus pour l'efficacité et la performance de la quantité d'énergie
"entrée" dans le moteur entraîne effectivement "sortie" de
l'énergie à la charge. Normalement, le
coefficient de performance ("COP") note est utilisé comme une mesure
de l'efficacité. Le COP est l'énergie de
sortie réelle d'entrer dans la charge et le mettre hors tension, divisé par
l'énergie qui doit être entré dans le dispositif avec sa combinaison moteur /
de la charge. Si il y avait zéro pertes
internes dans un moteur, ce moteur " parfait " aurait un COP égal à
1,0. C'est-à-dire tout apport d'énergie
dans le moteur serait sortie par le moteur directement à la charge, et aucune
partie de l'énergie d'entrée serait perdue ou dissipée dans le moteur lui-même.
Dans les générateurs
magnétiques du moteur actuellement en usage, cependant, en raison de la
friction et les défauts de conception, il ya toujours des pertes internes et de
l'inefficacité. Une partie de l'apport
d'énergie dans le moteur est dissipée dans ces pertes internes. En conséquence, l'énergie qui arrive à la
charge est toujours inférieure à l'énergie d'entrée. Ainsi, un moteur standard fonctionne avec un
COP de moins de 1,0, qui est exprimé en COP<1,0. Un moteur inefficace peut avoir un COP de 0,4
ou 0,45, tandis qu'un moteur spécialement conçu et très efficace peut avoir un
COP de 0,85.
Le champ conservateur
intérieur d'un moteur lui-même est divisé en deux phases. Produire un champ conservatrice implique
symétrie nette entre le " pouvoir sur " la phase de le magnétisme, le
rotor / volant et le pouvoir revenir en phase du rotor / volant vers le
magnétisme. Autrement dit, les deux flux
d'énergie sont identiques en amplitude mais de sens opposé. Chaque phase seul est dit " asymétrique
", c'est à dire qu'il a soit: 1) un flux net d'énergie sur le rotor /
volant; ou 2) refluer dans le magnétisme de rotor / volant une énergie nette. En termes simplifiés, il est désigné comme le
" pouvoir sur " et " pouvoir de retour dans " phases par
rapport aux moteurs magnétiques.
Pour la phase
d'alimentation sortante, l'énergie est dérivée de la force électromotrice
existant entre le pôle de stator et de pôles de rotor entrant dans un mode d'attraction. Dans cette phase, le mouvement de rotation
(du moment angulaire et de l'énergie cinétique) du rotor et le volant est
augmentée. En bref, on ajoute à la
puissance du rotor / volant d'inertie (et donc de la charge) entre les champs
de pôles de stator et de pôles de rotor (les aspects électromagnétiques du
système).
Pour le " retour
de courant dans la " phase, de l'énergie doit être réinjecté dans les
composants magnétiques du rotor et du volant d'inertie (et la charge) pour
surmonter les forces de traînée qui existent entre les pôles de stator et de
pôles de rotor sortant. Dans cette
phase, l'énergie est renvoyée à l'intérieur du système magnétique le mouvement
de rotation du rotor et le volant (du moment cinétique, ce qui est l'énergie de
rotation multipliée par le temps). Comme
il est bien connu en physique, le moment angulaire d'un rotor / volant offre un
moyen pratique pour stocker l'énergie avec le rotor de filage / masse d'inertie
agissant comme un réservoir d'énergie.
La plupart des moteurs
magnétiques conventionnels présente de jour utilisent diverses méthodes pour
surmonter et inverser partiellement EMF arrière. Retour EMF peut être défini comme l'impulsion
de la bobine de phase de retour et est le résultat de re-calibrage, qui est le
processus d'inversion de la polarité magnétiques, c'est-forme du Nord au Sud,
etc La FCEM est court-circuitée et le rotor est attiré revenir, éliminant ainsi
la traînée. Ceci peut être réalisé par
coulée en plus d'énergie, qui domine la force contre-électromotrice, en
produisant ainsi un EMF vers l'avant dans cette région. L'énergie nécessaire à ce procédé est fourni
par l'opérateur.
Il est bien connu que
la modification de la tension crée un seul EMF de retour et ne nécessite aucun
travail. C'est parce que de changer
l'énergie potentielle ne nécessite pas de modification de la forme de cette
énergie potentielle, mais seulement son ampleur. Le travail est le changement de la forme
d'énergie. Par conséquent, aussi
longtemps que la forme de l'énergie potentielle n'est pas modifiée, l'amplitude
peut être changée sans avoir à effectuer des travaux dans le processus. Le moteur de la présente invention tire
profit de cette opération autorisée pour créer force contre-électromotrice de
façon asymétrique, et de ce fait modifie son énergie potentielle disponible
utilisable.
Dans un système
d'alimentation électrique, le potentiel (tension) est modifié par
l'introduction d'énergie pour faire des travaux sur les charges internes du
générateur ou batterie. Cette énergie
potentielle est dépensée à l'intérieur du générateur (ou batterie) pour obliger
les charges internes de l'autre, formant un dipôle source. Ensuite, le système en circuit fermé externe
connecté à cette source dipôle pompes maladroitement les électrons passées dans
la ligne de masse à travers l'EMF arrière du dipôle source, dispersant ainsi
les frais et tuer le dipôle. Cette coupe
le flux d'énergie à partir de la source dipôle au circuit externe. En conséquence de ce procédé classique, il
est nécessaire de remplacer l'entrée et de l'énergie supplémentaire pour
restaurer de nouveau le dipôle. Les
circuits utilisés actuellement dans la plupart des générateurs électriques ont
été conçus pour continuer à détruire le flux d'énergie en diffusant en permanence
l'ensemble des frais de dipôle et se terminant le dipôle. Par conséquent, il est nécessaire de
continuer à entrer dans le générateur d'énergie pour maintenir la restauration
de sa source dipolaire.
A la recherche de l'art
antérieur n'a pas révélé tous les appareils à moteur de monopole et les
méthodes qui recyclent l'énergie disponible de l'arrière EMF pour charger une
batterie ou fournir de l'énergie électrique pour d'autres usages, comme décrit
dans la présente invention. Toutefois, les brevets antérieurs suivants
ont été examinés:
Le brevet des Etats-Unis. N ° 4055789 pour
Lasater, Fonctionnant sur batterie moteur avec FCEM charge.
Le brevet des Etats-Unis. N ° 2279690 à ZT
Lindsey, Combinaison Générateur moteur.
RESUME DE
L'INVENTION
Un aspect de l'appareil
et la méthode de la présente invention est un nouveau moteur électromagnétique
monopole qui capte l'énergie de retour EMF.
L'énergie EMF capturé dos peut être utilisé pour charger ou stocker de
l'énergie électrique dans une batterie de récupération. La quantité d'énergie récupérable, exprimée
en watts, dépend de la configuration, des circuits, des éléments de commutation
et le nombre et la taille des stators, des rotors, des aimants et des bobines
qui constituent le moteur.
Le moteur utilise une
petite quantité d'énergie à partir d'une batterie principale à "
déclencher " un plus grand apport
d'énergie disponible en fournissant force contre-électromotrice, ce qui
augmente l'énergie potentielle du système.
Le système utilise ensuite cette énergie potentielle disponible pour
réduire ou inverser, la FEM en arrière, augmentant ainsi l'efficacité du moteur
et, par conséquent, la COP.
Si l'énergie de la
phase 1 (la phase de puissance de sortie) est augmentée par l'énergie
supplémentaire disponible dans les électromagnétisme eux-mêmes, alors l'énergie
dans la phase 1 peut être supérieure à l'énergie dans la phase 2 (la puissance
de retour en phase) sans l'opérateur fournissant l'énergie utilisée. Cela produit un champ net non-conservatrice.
Nett puissance peut alors être prise à partir de la rotation du stator et le
volant, parce que l'énergie supplémentaire dans le stator et le volant par les
effets supplémentaires disponibles, est transformé par le rotor / volant en
excès moment angulaire et stockée en tant que tel. Le moment cinétique est conservée en toutes
circonstances, mais à présent, une partie du moment cinétique du volant
d'inertie ajoutée à, est évoqué par les effets supplémentaires en électromagnétisme,
plutôt que d'être fournie par l'opérateur.
Cela signifie que le
moteur est conçu pour créer délibérément une force contre-électromotrice
lui-même, et donc d'augmenter son énergie potentielle, retenant ainsi chaque
force supplémentaire pendant une période de temps et en l'appliquant à augmenter
le moment cinétique et de l'énergie cinétique du rotor et du volant. Plus précisément, ce retour de l'énergie EMF
avec sa force net est délibérément appliqué dans le moteur de la présente
invention est de surmonter et même inverser le glisser-retour classique
(l'arrière EMF). Ainsi, moins d'énergie
doit être pris dans le rotor et le volant à surmonter la FEM réduite en
arrière, et dans le cas idéal, cela n'est pas nécessaire puisque l'EMF arrière
a été maîtrisé et converti à transmettre EMF par l'arrière EMF énergie et la
force. Dans le moteur, la section de
traînée classique des Magnetics devient une section avant-EMF et ajoute
maintenant l'énergie du rotor / volant au lieu de le réduire. La caractéristique importante est que
l'opérateur ne paie que pour la petite quantité d'énergie nécessaire pour
déclencher l'EMF arrière de la batterie principale, et ne pas avoir à fournir
beaucoup plus grand retour de l'énergie de CEM elle-même.
Ainsi, lorsque
l'énergie désirée dans la phase 1 (la phase de la puissance de sortie) est
réalisée plus grande que l'énergie de traînée indésirable dans la phase 2, puis
une partie de la puissance de sortie normalement pris dans le rotor et le
volant par les champs de la phase 2, n'est pas requise. Par conséquent, en comparaison à un système
sans mécanismes de fcem spéciaux, une puissance supplémentaire est disponible à
partir du rotor / volant. Le rotor
maintient donc un moment angulaire supplémentaire et de l'énergie cinétique,
par rapport à un système qui ne produit pas de force contre-électromotrice
lui-même. Par conséquent, l'excès de
vitesse angulaire retenu par le rotor et le volant d'inertie peut être utilisée
en tant que puissance d'arbre supplémentaire pour alimenter une charge
extérieure.
Dans ce moteur, plusieurs procédés et
méthodes connus sont utilisés. Ceux-ci
permettent au moteur de fonctionner comme un système périodiquement ouverte
dissipative (disponible à recevoir l'énergie en excès de force contre-électromotrice)
loin de l'équilibre thermodynamique, grâce à quoi il produit et reçoit son
énergie en excès provenant d'une source externe connu.
Un procédé est utilisé
pour produire temporairement une plus grande source d'énergie externe
disponible autour d'une bobine excitée.
Les caractéristiques de conception de ce nouveau moteur offrent un
dispositif et un procédé qui peut produire immédiatement un deuxième
augmentation de cette énergie en même temps que le flux d'énergie est
inversée. Par conséquent, le moteur est
capable de produire deux champs électromagnétiques arrière asymétriques, l'une
après l'autre, de l'énergie à l'intérieur d'une seule bobine, ce qui augmente
considérablement l'énergie disponible et qui entraîne un excès d'énergie
disponible pour entrer dans le circuit alors que les impulsions qui sont
collectés et utilisés.
Le moteur utilise cet
excédent disponible de nouveau l'énergie EMF à surmonter et même inverser la
traînée EMF entre pôles de stator et de pôles de rotor, tout en fournissant
seulement une petite impulsion de déclenchement de l'énergie d'une batterie
primaire nécessaire pour commander et activer la direction de l'arrière le flux
d'énergie EMF .
En utilisant un certain
nombre de cette double auto asymétrique dos CEM pour chaque révolution du
rotor, le rotor et le volant se concentrent collectivement tous les excès
entrées impulsifs dans le moment cinétique accrue (exprimé en énergie
multipliée par le temps), couple arbre, et la puissance de l'arbre.
En outre, une partie de
l'énergie excédentaire produite délibérément dans la bobine par l'utilisation
de la double processus se manifeste sous la forme d'un excès d'énergie
électrique dans le circuit et peut être utilisée pour charger une batterie ou
des batteries de récupération. L'excès
d'énergie peut également être utilisé pour alimenter les charges électriques ou
pour alimenter le rotor et le volant, le rotor / volant fournissant aussi
l'arbre de puissance pour alimenter des charges mécaniques.
Le moteur utilise un
moyen de fournir la quantité relativement faible d'énergie d'une batterie
primaire pour initier l'auto asymétrique impulsif dos actions EMF. Ensuite, une partie de l'excédent d'énergie
électrique disponible soutiré EMF créé dos énergie est utilisée pour charger
une batterie de récupération augmenter considérablement les plus-tension des
impulsions.
Les caractéristiques de
conception de ce moteur de monopole utilisent un pôle magnétique de chaque
aimant du rotor et du stator. Le nombre
de impulsif auto-force contre-électromotrice dans une seule rotation du rotor
est doublé. Conceptions avancées peuvent
augmenter le nombre d'auto-arrière CEM en une seule rotation du rotor avec le
résultat qu'il ya une augmentation dans le nombre d'impulsions par rotation, ce
qui augmente la puissance de sortie de ce nouveau moteur.
La pointe de tension
brusque produite dans la bobine de ce moteur unipolaire par le champ de
s'effondrer rapidement la force contre-électromotrice dans la bobine est reliée
à une batterie de récupération en mode de charge et à une charge électrique
externe. Le résultat net est que la
bobine crée lui-même asymétriquement force contre-électromotrice d'une manière
qui ajoute de l'énergie et de l'impulsion à la disposition du circuit. L'énergie disponible recueillies dans la
bobine est utilisée pour inverser la phase de la force contre-électromotrice
champs stator-rotor à une condition d'EMF vers l'avant, avec l'ajout de
l'impulsion d'accélération et de vitesse angulaire du rotor et du volant. L'énergie de fcém disponibles recueillies
dans la bobine est utilisé pour charger une batterie. Les charges peuvent alors être entraînés par
la batterie.
Un dispositif et un
procédé dans lequel le moteur unipolaire modifie la section transversale de la
réaction des bobines dans le circuit, ce qui modifie rapidement la section de
réaction de la bobine, dans lequel il est appelé. Ainsi, étant donné que ce nouveau moteur
utilise seulement une petite quantité de courant sous la forme d'une impulsion
de déclenchement, il est capable de susciter et commander le changement
immédiat de la section transversale de la réaction de la bobine de cette
composante de flux d'énergie normalement perdue. Par conséquent, le moteur capture et dirige
une partie de cette énergie de l'environnement disponible habituellement
perdue, la collecte de l'excès d'énergie disponible dans la batterie et ensuite
la libérer pour une utilisation dans le moteur. Grâce calendrier et la
commutation, la conception de porte novateur de ce nouveau moteur dirige
l'excès d'énergie disponible, afin qu'il surmonte et inverse le EMF de retour
de la combinaison de pôles rotor-stator pendant ce qui serait normalement le
dos EMF et démontre la création du deuxième retour EMF du système. Maintenant, au lieu d'un " retard égal
" force étant produite dans la région arrière de la FEM, un EMF vers
l'avant est produite qui s'ajoute à l'énergie du rotor / volant d'inertie, au
lieu de la soustraction de celui-ci. En
bref, il accélère encore le rotor / volant.
Il en résulte un champ
magnétique non-conservatrice long de la trajectoire du rotor. L'intégrale de la ligne du champ autour de ce
chemin (c'est à dire, le travail net sur le rotor / volant pour augmenter son
énergie et du moment angulaire) n'est pas zéro, mais une quantité
importante. Par conséquent, la création
d'un EMF arrière moteur magnétique impulsion asymétrique:
1) Prend son excès
d'énergie disponible à partir d'une source externe connue, la grande partie
habituellement non interceptée de la circulation de l'énergie autour de la
bobine;
2) Augmente en outre la
dipolarité source par ce retour EMF énergie; et
3) Produit disponible
flux de l'excès d'énergie directement de l'augmentation de symétrie brisée du
dipôle source dans son échange de l'énergie féroce avec le vide local.
En opérant comme un
système dissipatif ouvert, pas en équilibre thermodynamique avec le vide actif,
le système peut recevoir de l'énergie disponible de façon admissible provenant
d'une source connue de l'environnement et la production de cette énergie à une
charge. Comme un système de dissipation
ouvert pas en équilibre thermodynamique, cette nouvelle et unique moteur de
monopole peut puiser dans le FEM à lui-même, les charges et les pertes
dynamiser simultanément, se conformer pleinement aux lois connues de la
physique et de la thermodynamique.
BREVE
DESCRIPTION DES DESSINS
Fig.1 est une vue de
côté en perspective d'un monopôle en arrière de la FEM moteur avec un seul
stator et un rotor unique.
Fig.2 est une vue de
dessus en perspective d'un monopôle en arrière de la FEM du moteur avec un seul
stator et un rotor unique.
Fig.3est un schéma de principe montrant le circuit de retour d'un moteur
unipolaire EMF.
 .
.
DESCRIPTION
DETAILLEE DE L'INVENTION
Un mode de réalisation
de la présente invention est un dispositif et un procédé pour un monopôle EMF
arrière de moteur électromagnétique.
Comme décrit dans le Résumé de l'invention, ce moteur de monopole est
conforme à toutes les lois applicables électrodynamiques de la physique et est
en harmonie avec la loi de la conservation de l'énergie, les lois de
l'électromagnétisme et d'autres lois connexes naturelles de la physique.
La force
contre-électromotrice du moteur unipolaire électromagnétique comprend une
combinaison d'éléments et de circuits disponible pour capturer l'énergie (force
contre-électromotrice) d'un élément de recouvrement, tel qu'un condensateur, à
partir de bobines de sortie. L'énergie emmagasinée disponible dans l'élément de
recouvrement est utilisé pour charger une batterie de récupération.
Comme point de départ,
une méthode arbitraire dans la description de ce dispositif sera utilisé, à
savoir, la circulation de l'énergie électrique et les forces mécaniques sera
suivie de la création de l'énergie à la batterie principale de son stockage
définitif dans la batterie de récupération.
Fig.1 est une vue de
côté en perspective du moteur unipolaire selon un mode de réalisation de
l'invention. Comme le montre la Fig.1,
l'énergie électrique de la batterie principale 11 se manifeste
périodiquement par le commutateur d'alimentation 12 et par la puissance
bobine câblage 13a. Dans un mode
de réalisation, interrupteur d'alimentation 12 est simplement un
interrupteur mécanique marche-arrêt et n'est pas électronique. Toutefois, l'interrupteur 12 peut être
un circuit de commutation à semi-conducteurs, un interrupteur reed magnétique,
un commutateur, un commutateur optique, un commutateur à effet Hall, ou un
autre commutateur à transistors classiques ou mécanique. Bobine 13 est composé de trois enroulements: 13a puissance bobinage, 13b déclenchement
bobine d'enroulement, et le rétablissement bobinage 13c. Toutefois, le nombre d'enroulements peut être plus
ou moins de trois, en fonction de la taille de la bobine 13, la taille
du moteur et la quantité d'énergie disponible pour être capturé, stocké et
utilisé, telle que mesurée en watts.
L'énergie électrique s'écoule ensuite périodiquement de puissance bobine
13a enroulement et à travers le transistor 14.
Énergie de
déclenchement aussi se manifeste périodiquement par la résistance variable 15
et la résistance 16 diode de serrage 17 pinces de la tension
base-émetteur inverse du transistor commutateur 14 à un niveau de
polarisation inverse sécurité qui n'endommage pas le transistor. Les flux d'énergie au stator 18a et 18b pièce
polaire, une extension du stator 18a.
La pièce polaire 18b est aimantée électriquement uniquement
lorsque le transistor interrupteur 14 est sous tension et maintient la
même polarité que les pôles du rotor 19 - pôle Nord dans ce cas - quand
magnétisées électriquement. Le Nord pôles du rotor 19a, 19b et 19c,
qui sont attachés à rotor 20, viennent en apposition momentanée avec
pièce polaire 18b création d'une interface de monopole temporaire. La pôles 19a, b, c, qui sont en fait
des aimants permanents avec leurs pôles Nord tournées vers l'extérieur du rotor
20, de maintenir la même polarité lors de l'alignement momentané avec
pièce polaire 18b.
Le rotor 20 est fixé à l'arbre du
rotor 21, qui a la poulie d'entraînement 22 ci-joint à l'arbre de
rotor 21 sont rotor-arbre blocs d'appui 31a et 31b, comme on le
voit sur la Fig.2. Comme le rotor
20 commence à tourner, les pôles 19a, b, c est respectivement en
alignement avec les pôles aimantés pièce 18b à une interface de type
monopôle momentanée de l'énergie circulant à travers le pont redresseur à
diodes 23 et le condensateur 24, le nombre de condensateurs peut
être d'une grande variété , en fonction de la quantité d'énergie à stocker
temporairement avant d'être expulsé ou le flash chargé dans la batterie de récupération
29 courroie de distribution 25 relie la poulie d'entraînement 22
sur l'arbre de distribution 21 à la roue de synchronisation 26. Attaché à la roue de synchronisation 26 est
le contact rotor 27, un cuivre commutateur que lors de la rotation, entre
en contact avec des balais sur l'interrupteur mécanique 28 les moyens
pour compter le nombre de tours du rotor peut être un pignon de distribution ou
une courroie de distribution isolé.
Enfin, l'énergie disponible provenant de la force contre-électromotrice
qui est stockée dans le condensateur 24 est ensuite déchargée et stockée
dans la batterie de récupération 29.
Fig.2 est une vue de
dessus en perspective mécanique du moteur unipolaire de la présente invention
sans circuit électrique. Stator 18a se
compose de la bobine 13, qui est constitué de trois enroulements de
bobine séparés: puissance 13a enroulement de bobine, la bobine de
déclenchement et de récupération d'enroulement 13b-13c bobine
d'enroulement. La pièce polaire 18b est
à la fin du stator 18a. Comme rotor 20 (qui est fixé à
l'arbre du rotor 21) tourne, chaque pôle 19 vient respectivement
dans une interface de type monopôle momentané avec la pièce polaire 18b. La polarité de la pièce polaire 18b est
constant lorsque aimantée électriquement.
Arbre rotor 21 a arbre du rotor billes 31a, b attaché à
elle pour la stabilisation de l'arbre du rotor 21 Attaché à l'arbre du
rotor 21 est la poulie d'entraînement 22 avec la courroie de
distribution 25 en prise avec elle.
Un autre moyen de synchronisation peut être un pignon de
distribution. Courroie de distribution 25
est en prise avec la roue de synchronisation 26 à son autre
extrémité. Roue de distribution 26 est
fixé à l'arbre de distribution 30.
Arbre 30 est stabilisé avec l'arbre de distribution des blocs de
palier 32a, b. Fixée à une
extrémité de l'arbre de distribution 30 est le contact rotor 27 avec
une brosse 28a, qui, lors de la rotation de l'arbre de synchronisation,
entre en contact momentané avec des brosses 28b, c.
Fig.3 est un schéma
de principe décrivant le circuit du moteur unipolaire. Bloc batterie primaire 40 représente 11
l'énergie qui s'écoule vers le bloc de bobine 41, qui représente les
enroulements de bobine 13a, b, c.
A partir du bloc de
bobine flux d'énergie dans 41 trois directions: pour déclencher circuit
bloc 42, bloc transistor-circuit 43, et le bloc
redresseur-circuit 44. L'énergie
circule de redresseur-bloc 44 au bloc de stockage condensateur 45 avec
l'énergie qui coule du bloc 45 à à la fois le bloc-batterie recouvrement
46 et le bloc 47 rotor-interrupteur.
En se référant à la Fig.1,
le fonctionnement du moteur est décrit selon un mode de réalisation de
l'invention. Pour les besoins de l'explication, on suppose que le rotor 20 est
d'abord immobile, et l'un des pôles 19 est dans la position trois
heures.
En premier lieu, le commutateur 12 est
fermé. Étant donné que le transistor 14
est hors tension, aucun courant ne circule à travers l'enroulement 13a. Ensuite, le moteur est démarré par la rotation du
rotor 20, par exemple, dans le sens des aiguilles d'une montre. Le rotor peut être tourné à la main, ou par
un dispositif ou circuit de départ à moteur classique (non représenté).
Lorsque le rotor 20 tourne,
les pôles 19 se déplace de la position trois heures vers la pièce
polaire 18b et génère un flux magnétique dans les enroulements 13a,
13b et 13C. Plus précisément, le
stator 18a et 18b de la pièce polaire comprend un matériau
ferromagnétique tel que du fer. Par
conséquent, comme le poteau 19 se déplace plus près de la pièce polaire 18b,
on magnétise la pièce 18b à un pôle de polarité - Sud, dans ce cas - qui
est opposée à la polarité du pôle 19 (qui est du Nord). Cette aimantation de la pièce polaire 18b génère
un flux magnétique dans les enroulements 13a-13c. En outre, cette aimantation provoque aussi
une attraction magnétique entre le pôle 19 et la pièce 18b pôle. Cette attraction attire le pôle 19 vers
la pièce polaire 18b, et renforce ainsi la rotation du rotor 20.
Le flux magnétique dans
les enroulements 13a-13c génère des tensions aux bornes des enroulements
respectifs. Plus précisément, comme le
poteau 19 tourne vers la pièce polaire 18b, l'aimantation de la 18a
du stator et la pièce polaire 18b, et donc du flux magnétique dans
les enroulements 13a-13c, augmente.
Cette augmentation de flux génère des tensions aux bornes des
enroulements 13a-13c de telle sorte que le (sommet) en pointillé
extrémité de chaque enroulement est plus positive que l'extrémité opposée. Ces tensions sont proportionnelles à la
vitesse à laquelle le flux magnétique augmente, et ainsi, ils sont
proportionnels à la vitesse de la perche 19.
À un certain moment, la
tension aux bornes de l'enroulement 13b est suffisamment élevé pour
rendre le transistor 14c sur.
Cette mise en marche, c'est-à-déclenchement, la tension dépend de la
résistance de série combinée du potentiomètre 15 et la résistance 16. Plus cette résistance combinée est élevée, plus la tension de
déclenchement, et vice-versa. Par conséquent,
on peut régler le niveau de la tension de déclenchement en agissant sur le
potentiomètre 15.
De plus, selon le
niveau de tension aux bornes du condensateur 24, la tension aux bornes
de 13c enroulement peut être suffisamment élevée pour provoquer un
courant de récupération de l'énergie à circuler à travers le 13c enroulement,
le redresseur 23 et le condensateur 24. Ainsi, lorsque l'les flux de courant de
récupération, le bobinage 13c est de convertir l'énergie magnétique du
pôle de rotation 19 en énergie électrique, qui est stockée dans le
condensateur 24.
Une fois activé, le
transistor 14 génère un flux magnétique opposé dans la enroulements 13a-13c. Plus précisément, le transistor 14 tire
un courant à partir de la batterie 11, par l'intermédiaire du
commutateur 12 et l'enroulement 13b. Ce courant augmente et génère un flux
magnétique qui s'oppose à l'augmentation du flux généré par le pôle de rotation
19.
Lorsque le flux
magnétique s'opposant dépasse le flux généré par le pôle de rotation 19,
le flux opposé renforce la rotation du rotor 20. Plus précisément, lorsque le flux opposée
(qui est générée par l'augmentation du courant à travers l'enroulement 13a)
est supérieur au flux généré par l'mât 19, l'aimantation de la pièce
polaire 18 inverse de pôle Nord.
Par conséquent, la pièce polaire 18 d'inversion magnétique
repousse le pôle 19, et ainsi confère une force de rotation au rotor 20. La pièce polaire 18 fait tourner le
rotor 20 avec un maximum d'efficacité, si l'aimantation pièce polaire
inverse au nord lorsque le centre de l'pôle 19 est aligné avec le centre
de la pièce polaire. Typiquement, le
potentiomètre 15 est réglé pour régler la tension de déclenchement du
transistor 14 à un niveau qui atteint ou se rapproche de cette
efficacité maximale.
Le transistor 14 devient
alors hors tension avant de le flux adverse peut travailler contre la rotation
du rotor 20. Plus précisément, si
la pièce polaire 18 reste aimantée au pôle Nord, il repoussera la
prochaine pôle 19 dans une direction (dans le sens antihoraire dans cet
exemple) à l'opposé à la direction de la rotation du rotor 20. Par conséquent, le transistor 14 devient
moteur hors tension, et démagnétise ainsi la pièce polaire 18, avant
cette répulsion indésirable se produit.
Plus précisément, lorsque le flux dépasse opposée du flux généré par le
pôle 19, la tension aux bornes de l'enroulement 13b polarité
inverse de telle sorte que l'extrémité en pointillé est moins positive que
l'extrémité opposée. La tension aux
bornes de l'enroulement 13b diminue à mesure que le flux augmente
opposées. À un moment donné, la tension
à la base du transistor diminue à un niveau qui rend le transistor 14 hors
tension. Ce point de coupure dépend de
la résistance combinée du potentiomètre 15 et la résistance 16 et
le condensateur (non représenté) à la base du transistor. Par conséquent, le potentiomètre 15 peut
être ajusté, ou d'autres techniques classiques peut être utilisé pour ajuster
le calendrier de ce point de coupure.
Le redresseur 23 et
le condensateur 24 de récupérer l'énergie qui est libérée par le champ
magnétique (énergie qui serait autrement perdue) lorsque le transistor 14 se
met hors tension. Plus précisément, le transistor 14 se
tournant brusquement, coupe le courant circulant dans l'enroulement 13a. Cela génère des pics de tension aux bornes
des enroulements 13a-13c où les extrémités en pointillés sont moins
positifs que leurs extrémités opposées respectives. Ces pointes de tension représente l'énergie
libérée dans l'aimantation induite par le courant de stator 18a et 18b effondrements
pièce polaire, et peuvent avoir une amplitude de plusieurs centaines de
volts. Mais, comme le pic de
tension aux bornes des 13c enroulement augmente au-delà de la somme des
deux gouttes de diodes du redresseur 23, il provoque un courant de
récupération d'énergie à circuler à travers le redresseur 23 et la
tension aux bornes de la charge le condensateur 24 au condensateur 24. Ainsi , une partie importante de l'énergie
libérée lors de l'effondrement du champ magnétique induit par un courant est
récupéré et stocké sous la forme d'une tension dans le condensateur 24 en
outre, la diode 17 évite d'endommager le transistor 14 par le
serrage de la tension base-émetteur inverse causée par le pic de tension aux
bornes de l'enroulement 13b.
L'énergie récupérée
peut être utilisée dans un certain nombre de façons. Par exemple, l'énergie peut être utilisée
pour charger une batterie 29.
Dans un mode de réalisation, la roue de synchronisation 26 fait
deux tours pour chaque tour du rotor 20.
Le rotor de contact 27 ferme un interrupteur 28, et donc
décharges la charge du condensateur 24 dans la batterie 29, une
fois par tour de roue 26. Autres
dispositifs et techniques de l'énergie et de recapture peut également être
utilisé. Rotor 20 peut être arrêté,
soit par l'application d'un frein à elle ou en ouvrant l'interrupteur 12.
D'autres modes de
réalisation du moteur unipolaire sont envisagés. Par exemple, au lieu de rester fermé pendant l'ensemble du
fonctionnement du moteur, le commutateur 12 peut être un commutateur
optique classique ou un commutateur à effet Hall qui s'ouvre et se ferme
automatiquement au moment approprié. Pour augmenter
la puissance du moteur, le nombre de stators 18a et 18b des pièces
polaires, peut être augmentée et / ou le nombre de pôles 19. En outre, on peut magnétiser le stator 18a
et 18b pièce polaire pendant l'attraction de la perche 19 à la place
ou en plus de magnétisation du stator et la pièce polaire pendant la répulsion
de la perche 19.
En outre, le stator 18a
peut être omise de sorte que la bobine 13 est une bobine à air, ou
le stator 18a et 18b de la pièce polaire peut composer d'un aimant
permanent. En outre, bien que le
transistor 14 est décrit comme étant un transistor bipolaire, un
transistor de type MOSFET peut également être utilisé. En outre, l'énergie récupérée peut être
utilisée pour recharger la batterie 11.
En outre, bien que
décrit comme tournant dans le sens des aiguilles d'une montre, le rotor 20 peut
tourner dans le sens anti-horaire. De
plus, bien que décrit comme attirer un pôle de rotor 19 lorsque aucun
courant ne circule à travers l'enroulement 13a et repoussant le pôle 19
quand un courant circule à travers enroulement 13a, la pièce polaire
18b peut être construit de sorte qu'il attire le pôle 19 quand un
courant circule à travers l'enroulement 13a et repousse le pôle 19 quand
aucun courant ne traverse enroulement 13a.
Dans de nombreux systèmes de stator / rotor, chaque stator individuel
peut être excité à la fois une ou l'ensemble des stators peut être mis sous
tension simultanément. N'importe quel
nombre de stators et rotors peut être incorporé dans la conception de ces
multiples stator / rotor combinaisons de moteur de monopole. Toutefois, s'il peut y avoir plusieurs
stators par rotor, il ne peut y avoir qu'un seul rotor pour un seul
stator. Le nombre de stators et
rotors qui comprend un moteur particulier dépend de la quantité d'énergie
nécessaire, sous la forme de watts.
N'importe quel nombre d'aimants, utilisé dans un mode monopolaire, peut
comprendre un seul rotor. Le nombre d'aimants incorporés dans un rotor
particulier dépend de la taille du rotor et de la puissance requise du moteur. La taille et puissance désirée du moteur
détermine si les stators seront en parallèle ou déclenchements successifs. L'énergie est accessible à travers la capture de
l'énergie disponible à partir de la force contre-électromotrice en raison d'un
circuit unique et le timing du moteur unipolaire. Les moteurs individuels peuvent être reliés en séquence avec chaque
moteur ayant diverses combinaisons de stators et rotors, ou ils peuvent être
montés en parallèle. Chaque rotor
peut avoir n'importe quel nombre de aimants du rotor, le tout arrangé sans
changement de polarité. Le nombre de
stators pour un moteur individuel peut également être d'une grande variété.
Une caractéristique qui distingue ce moteur à
partir de toutes les autres, est l'utilisation d'aimants unipolaires en
apposition momentané avec la pièce polaire du stator en maintenant la même
polarité lorsque magnétisée. Dans ce
mode de réalisation particulier, il ya trois aimants et une pièce polaire, la
pièce polaire étant une extension d'un stator à aimant permanent.
JOHN BEDINI: MOTEUR / GÉNÉRATEUR
Brevet US 6.392.370 21 mai 2002 Inventeur: John C. Bedini
DISPOSITIF ET PROCÉDÉ DE A DOS EMF PERMANENT
GÉNÉRATEUR DE
MOTEUR ÉLECTROMAGNÉTIQUE
RÉSUMÉ
Cette invention est une
force contre-électromotrice du moteur-générateur électromagnétique permanent et
un procédé utilisant un procédé de recalibrage pour capter l'énergie
électromagnétique dans le système. Le
dispositif comprend un rotor avec des aimants de même polarité ; une roue de
synchronisation en apposition à un effet Hall magnétique sélecteur de micros à
semi-conducteur ; et un stator composé de deux barres reliées par un aimant
permanent à pièces polaires aimantées à une extrémité de chaque barre. Il existe des bobines d'entrée et de sortie
créées en enroulant chaque barre avec un matériau conducteur tel que du fil de
cuivre. L'énergie provenant des bobines
de sortie est transférée à un redresseur à diode ou la récupération. Les aimants du rotor, qui se trouve sur un
arbre avec la roue de synchronisation, sont en apposition aux pièces polaires
aimantées des deux barres. L'invention
fonctionne grâce à un procédé de recalibrage, à savoir les champs de flux créés
par les bobines sont effondrés à cause d'une inversion du champ magnétique dans
les pièces polaires aimantées, permettant ainsi la capture de l'énergie disponible
de la force contre-électromotrice.
Énergie disponible supplémentaire peut être capturé et utilisé pour
re-dynamiser la batterie, et / ou envoyé dans une autre direction pour être
utilisé pour le travail. En variante,
l'énergie disponible de la force contre-électromotrice peut être dissipée dans
le système.
ARRIERE-PLAN DE
L'INVENTION
1 Domaine de
l'invention
L'invention concerne de
manière générale la capture de l'énergie électromagnétique en utilisant un
procédé et un dispositif pour créer force contre-électromotrice (force
électromagnétique) et remise en phase de la force contre-électromotrice et à
recycler capter l'énergie disponible de la force contre-électromotrice. Force contre-électromotrice est également
désigné sous le nom recalibrage et peut être définie comme l'énergie créée par
le champ magnétique de bobines, et qu'à partir de bobines, et pas des aimants.
2.
Renseignements et connexes Art
Fonctionnement d'un
moteur magnétique normal a le pôle de rotor attire le pôle de stator, ce qui
entraîne la génération de puissance des aimants de rotor et le volant. Au cours de cette phase, l'énergie s'écoule
depuis le magnétisme à rotor / volant d'inertie et est stocké dans la rotation
accrue. Un pôle de rotor en laissant un
pôle de stator et la création d'un état des résultats de glisser-retour au
pouvoir d'avoir à être remis dans la section magnétique par le rotor et le
volant à surmonter la force de glisser-retour.
Dans un moteur parfait,
sans friction, le champ de force net est donc considéré comme le plus
conservateur. En d'autres termes, un
moteur EMF plus conservatrice a une efficacité maximale. Sans énergie supplémentaire continuellement
amené au moteur, aucun travail net peut être fait par le champ magnétique,
étant donné que la moitié du temps le champ magnétique ajoute de l'énergie à la
charge (le rotor et le volant) et l'autre moitié du temps, il soustrait
l'énergie à partir de la charge (le rotor et le volant). Par conséquent, la production totale d'énergie net est égal à zéro dans
tout processus rotatif tel sans apport d'énergie supplémentaire. Pour utiliser un moteur magnétique à jour
actuelle, l'énergie continue doit être introduite dans le moteur à surmonter
glisser en arrière et pour alimenter le moteur et de sa charge.
Moteurs et des générateurs de champs
électromagnétiques présents tous utiliser ces champs conservatrices et donc,
avoir des pertes internes. Par
conséquent, il est nécessaire d'entrée en permanence toute l'énergie que la
sortie du moteur à la charge, ainsi que plus d'énergie pour couvrir les pertes
à l'intérieur du moteur lui-même. EMF
moteurs sont prévus pour l'efficacité et la performance de la façon dont
l'entrée beaucoup d'énergie dans le moteur se traduit en fait l'énergie de
sortie à la charge. Normalement, le
coefficient de performance (COP) notation est utilisée comme une mesure de
l'efficacité. La Conférence des Parties
est l'énergie de sortie réelle d'entrer dans la charge et le mettre hors
tension, divisée par l'énergie qui doit être entrée dans le dispositif à sa
charge. COP est la puissance de
sortie dans la charge, divisé par la puissance absorbée de la combinaison
moteur / charge. Si il y avait zéro
pertes internes dans un moteur, ce moteur «parfait» aurait un coefficient de
performance (COP) égal à 1,0. C'est-à-dire toute l'énergie injectée dans le
moteur serait sortie par le moteur directement à la charge, et aucune partie de
l'énergie d'entrée serait perdue ou dissipée dans le moteur lui-même.
Dans les générateurs
magnétiques du moteur actuellement en usage, cependant, en raison de la
friction et les défauts de conception, il ya toujours des pertes internes et de
l'inefficacité. Une partie de l'apport
d'énergie dans le moteur est dissipée dans ces pertes internes. En conséquence, l'énergie qui arrive à la
charge est toujours inférieure à l'énergie d'entrée. Ainsi, un moteur standard fonctionne avec un
COP de moins de 1,0, ce qui est exprimé en COP<1,0. Un moteur inefficace peut avoir un COP de
0,4 ou 0,45, tandis qu'une spécialement conçu, moteur très efficace peut avoir
un COP de 0,85.
Le champ conservateur
intérieur d'un moteur lui-même peut être divisé en deux phases. Produire un champ conservatrice implique
symétrie net entre le «pouvoir sur» la phase de le magnétisme, le rotor / volant
et le " pouvoir revenir en " phase du rotor / volant vers le
magnétisme. Autrement dit, les deux flux
d'énergie (un des composants magnétiques dans le rotor et le volant, et l'autre
du rotor et le volant vers le magnétisme) sont identiques en amplitude mais de
sens opposé. Chaque phase seul est dit " asymétrique
" ; qui est, soit il a :
1) un flux d'énergie
net sur le rotor / volant ; ou
2) refluer dans le magnétisme de rotor / volant une énergie nette. En termes simplifiés, il est désigné comme le
" pouvoir sur " et " pouvoir de retour dans " phases par
rapport aux moteurs magnétiques. Ainsi,
les deux phases sont asymétriques :
1) la phase
d'alimentation scolaire ; et
2) le " retour de
courant dans la " phase, en se référant aux magnétiques.
Pour la phase
d'alimentation sortante, l'énergie est dérivée de la force électromotrice
existant entre le pôle de stator et de pôles de rotor entrant dans un mode
d'attraction. Dans cette phase, le
mouvement de rotation (du moment angulaire et de l'énergie cinétique) du rotor
et le volant est augmentée. En bref, on
ajoute à la puissance du rotor / volant d'inertie (et donc de la charge) entre
les champs de pôles de stator et de pôles de rotor (les aspects électromagnétiques
du système).
Pour le " retour
de courant dans la " phase, de l'énergie doit être réinjecté dans les
composants magnétiques du rotor et du volant d'inertie (et la charge) pour
vaincre les forces de traînée de reprise existant entre les pôles de stator et
de pôles de rotor sortant. Dans cette
phase, l'énergie est renvoyée à l'intérieur du système magnétique le mouvement
de rotation du rotor et le volant (du moment cinétique, ce qui est l'énergie de
rotation multipliée par le temps). Comme
il est bien connu en physique, le moment angulaire d'un rotor / volant offre un
moyen pratique pour stocker l'énergie avec le rotor de filage / masse d'inertie
agissant comme un réservoir d'énergie.
Tous les moteurs magnétiques conventionnels
présente de jour utilisent diverses méthodes pour surmonter, et d'inverser
partiellement, EMF arrière. FCEM est la
rupture de l'impulsion de retour de phase à partir de la bobine et est aussi
appelé recalibrage. La FCEM est
court-circuité et le rotor est attiré revenir, éliminant ainsi dos glisser. Ceci peut être réalisé par coulée en plus
d'énergie pour vaincre la force contre-électromotrice, en produisant ainsi un
EMF vers l'avant dans cette région. L'énergie nécessaire à cette méthode doit
être fournie par l'opérateur.
Le moteur de la présente invention utilise
seulement une petite quantité d'énergie à " déclencheur " un plus
grand apport d'énergie disponible en fournissant force contre-électromotrice,
ce qui augmente l'énergie potentielle du système. Il utilise alors cet excès d'énergie potentielle
pour réduire ou inverser EMF arrière, augmentant ainsi l'efficacité du moteur
et, par conséquent, la valeur de la COP.
Si l'énergie de la
phase 1 (la phase de puissance de sortie) est augmentée par l'énergie
supplémentaire disponible dans les électromagnétisme eux-mêmes, alors l'énergie
dans la phase 1 peut être supérieure à l'énergie dans la phase 2 (la puissance
de retour en phase) sans l'opérateur fournissant l'énergie utilisée. Cela produit un champ net non-conservatrice. La puissance nette peut alors être prise à
partir de la rotation du stator et le volant, parce que l'énergie transférée
disponible dans le stator et le volant par les effets supplémentaires, est
transformé par le rotor / volant d'inertie supplémentaire à moment cinétique et
stockée en tant que tel. Moment
angulaire est conservé en tout temps; mais maintenant une partie du moment
cinétique du volant d'inertie ajoutée à est produite par les effets
supplémentaires des électromagnétique au lieu d'être fournies par l'opérateur.
Électrodynamiciens supposent
que l'énergie disponible potentiel de tout système peut être modifié à volonté
et sans coût. C'est EMF arrière et est
bien connu en physique. Il est aussi
régulièrement utilisé par électrodynamiciens dans les aspects théoriques. Toutefois, pour simplifier les mathématiques,
électrodynamiciens créeront un CEM à deux reprises simultanément, chaque EMF
arrière étant soigneusement sélectionnés de sorte que les deux forces
disponibles qui sont produites, sont égales et opposées et s'annulent "symétrique". Ceci est appelé "force
contre-électromotrice symétrique".
Un système de fcém symétrique ne peut pas produire un COP> 1.0.
D'autre part, le moteur
de la présente invention crée délibérément un EMF de retour elle-même et son
énergie potentielle qu'une seule fois à un moment, retenant ainsi chaque force
supplémentaire pendant une période de temps et en l'appliquant à augmenter le
moment cinétique et de l'énergie cinétique de l'rotor et le volant. Plus précisément, ce retour de l'énergie EMF
avec sa force net est délibérément appliqué dans le moteur de la présente
invention est de surmonter et même inverser le glisser-retour classique
(l'arrière EMF). Par conséquent moins
d'énergie doit être prise par le rotor et le volant à surmonter la FEM réduite en
arrière, et dans le cas idéal cela n'est pas nécessaire car l'arrière EMF a été
maîtrisé et converti à transmettre EMF par l'arrière EMF énergie et la
force. Dans le moteur de la présente
invention, la section arrière classique de faire glisser les composants
magnétiques devient une section de l'avant-CEM et ajoute maintenant l'énergie
au rotor / volant au lieu de le soustraire.
La caractéristique importante est que l'opérateur ne dispose que de
fournir la petite quantité d'énergie nécessaire pour déclencher l'EMF arrière,
et ne pas avoir à fournir beaucoup plus grand retour de l'énergie de CEM
elle-même.
Lorsque l'énergie
souhaitée dans la phase 1 (phase puissance de sortie) est ainsi supérieure à la
" faites glisser l'arrière" énergie indésirable dans la phase 2, qui
faisait alors partie de la puissance de sortie normalement traîna du rotor et
le volant par les champs en phase 2 n'est pas nécessaire. Ainsi, par rapport à un système sans les
mécanismes de fcem spéciales, la puissance supplémentaire est disponible sur le
rotor / volant. Le rotor maintient
moment angulaire supplémentaire et de l'énergie cinétique, par rapport à un
système qui ne produit pas de force contre-électromotrice lui-même. Par conséquent, l'excès de vitesse angulaire
retenu par le rotor et le volant d'inertie peut être utilisée en tant que
puissance d'arbre supplémentaire pour alimenter une charge externe reliée à
l'arbre.
Un moteur magnétique
standard fonctionne à la suite du moteur étant muni d'un apport d'énergie
externe dans le système par l'opérateur pour réduire la phase 2 (alimentation
dans le magnétisme du rotor / volant) par l'une de plusieurs méthodes et
dispositifs. Le but principal de cette
énergie d'entrée externe dans le système est de surmonter la force contre-électromotrice
et pour fournir également des inévitables pertes d'énergie dans le
système. Il n'y a pas apport d'énergie
distincte de l'entrée de l'opérateur.
Par conséquent, la Conférence des Parties de tout moteur magnétique
standard est de COP inférieur à 1,0. Le
rendement d'un moteur magnétique norme varie de moins de 50% à un maximum
d'environ 85%, et a donc un COP <1,0.
Jusqu'à l'introduction
du moteur de la présente invention, il a été une pratique standard universel
que l'opérateur doit fournir toute l'énergie utilisée pour réduire l'EMF
arrière, prévoir les pertes internes, et la puissance de la charge. Il est donc une croyance commune par la
communauté scientifique que d'un idéal (sans perte) moteur à aimant permanent
ne peut pas dépasser un COP de 1,0. C'est vrai, aussi longtemps que l'opérateur
lui-même doit fournir toute l'énergie.
En outre, comme de véritables moteurs magnétiques permanents ont des
pertes internes réels, une partie de l'énergie d'entrée est toujours perdue
dans le moteur lui-même, et que la perte d'énergie n'est pas disponible pour
alimenter le rotor / volant d'inertie et la charge. Par conséquent un véritable moteur magnétique
permanent de type classique aura toujours un COP <1,0.
Un problème a trait à
la façon dont l'énergie de retour EMF peut être obtenu à partir de
l'environnement externe de circuit pour la tâche spécifique de réduire la FEM
back-glisser sans que l'opérateur n'ait à fournir une entrée de cette énergie
excédentaire. En bref, le défi ultime
est de trouver un moyen de rendre le système :
1) devient un système
dissipatif ouvert, qui est un système de réception de l'énergie excédentaire
disponible à partir de son environnement, en d'autres termes, à partir d'une
source externe; et
2) d'utiliser ce
surplus d'énergie disponible pour réduire la traînée-back EMF entre stator et
rotor pôles comme le pôle de rotor quitte le pôle de stator.
Si cet objectif peut
être atteint, le système est retiré de l'équilibre thermodynamique. Au lieu de cela, il sera converti en un
système d'équilibre hors de thermodynamique.
Un tel système n'est pas obligé d'obéir à l'équilibre thermodynamique
classique.
Au lieu de cela, un
système thermodynamique hors équilibre doit obéir à la thermodynamique des
systèmes ouverts loin des paramètres établis et bien connus de l'équilibre
thermodynamique. Comme il est bien connu
dans la physique de la thermodynamique, ces systèmes ouverts peuvent de manière
admissible :
1) auto-ordre;
2) en auto-oscillation;
3) une sortie plus revenir énergie EMF de l'apport d'énergie par
l'opérateur (l'excédent disponible dos énergie EMF est reçu depuis une source
externe et de l'énergie est entrée par l'opérateur ainsi);
4) de puissance lui-même, ainsi que ses pertes de charges et simultanément
(dans ce cas, toute l'énergie est reçue à partir de la source externe
disponible et il n'y a aucun apport d'énergie à partir de l'opérateur); et
5) présentent une entropie négative, qui est, de produire une augmentation
de l'énergie qui est disponible dans le système, et qui est indépendant de
l'énergie dans le système mis par l'opérateur.
Par définition,
l'entropie correspond à peu près à l'énergie d'un système qui est devenu
indisponible à l'utilisation. Entropie
négative correspond à l'énergie supplémentaire d'un système qui est devenu
disponible.
Dans la force
contre-électromotrice aimant permanent générateur du moteur électromagnétique
de la présente invention, plusieurs procédés connus et des procédés sont
utilisés qui permettent à l'invention d'opérer périodiquement comme un système
dissipatif ouverte (réception disponible l'excès d'énergie de force
contre-électromotrice) loin de l'équilibre thermodynamique, grâce à quoi il
produit et reçoit son excès d'énergie à partir d'une source externe connue.
Un procédé est utilisé
pour produire temporairement une plus grande source d'énergie externe
disponible autour d'une bobine excitée.
Ensuite, les caractéristiques de conception uniques de ce nouveau moteur
fournit une méthode et un mécanisme qui peut produire immédiatement un deuxième
augmentation de cette énergie, en même temps que le flux d'énergie est
inversée. Par conséquent, le moteur est
capable de produire deux champs électromagnétiques arrière asymétriques, l'une
après l'autre, de l'énergie à l'intérieur d'une seule bobine, ce qui augmente
considérablement l'énergie disponible et qui entraîne un excès d'énergie
disponible pour entrer ensuite le circuit comme une impulsion, sont recueillis
et utilisé.
Le présent moteur
utilise cet excédent disponible dos énergie EMF à surmonter et même inverser
l'arrière-glisser EMF entre le pôle de stator et le pôle de rotor, tout en
fournissant seulement une petite impulsion de déclenchement d'énergie
nécessaire pour contrôler et activer la direction de l'arrière flux d'énergie
EMF.
En utilisant un certain
nombre de cette double auto asymétrique dos CEM pour chaque révolution du
rotor, le rotor et le volant se concentrent collectivement tous les excès
entrées impulsifs dans le moment cinétique accrue (exprimé en énergie multipliée
par le temps), couple arbre, et la puissance de l'arbre.
En outre, une partie de
l'énergie excédentaire produite délibérément dans la bobine par l'utilisation
de la double processus se manifeste sous la forme d'un excès d'énergie
électrique dans le circuit et est utilisée pour alimenter des charges
électriques, par exemple, une lampe, un ventilateur, un moteur ou autre les
appareils électriques. Le reste de
l'énergie excédentaire produite dans la bobine peut être utilisé pour alimenter
le rotor et le volant, le rotor / volant fournissant aussi l'arbre de puissance
pour alimenter des charges mécaniques.
Cette nouvelle et
unique moteur utilise un moyen de fournir la quantité relativement faible
d'énergie pour initier l'auto asymétrique impulsif dos actions EMF. Ensuite, une partie de l'excédent d'énergie
électrique disponible soutiré les CEM arrière est utilisé pour recharger la
batterie avec énormément augmenté au cours des impulsions de tension.
Les caractéristiques de
conception uniques de ce moteur utilisent les deux pôles magnétiques nord et
sud de chaque aimant du rotor et du stator.
Par conséquent, le nombre de travailleurs impulsif dos les champs en une
seule rotation du rotor est doublé.
Conceptions avancées augmenter le nombre de travailleurs de retour des
champs électromagnétiques en une seule rotation du rotor avec le résultat qu'il
ya une augmentation dans le nombre d'impulsions par tour qui augmentent la
puissance de ce nouveau moteur.
L'impulsion de tension
nette produite dans la bobine de ce moteur par le nouveau champ de s'effondrer
rapidement la force contre-électromotrice dans la bobine est connectée à une
batterie en mode de charge et à une charge électrique externe. Le résultat net est que la bobine crée
lui-même asymétriquement force contre-électromotrice d'une manière
impulsionnelle et ajouter de l'énergie à la disposition du circuit. L'excès d'énergie disponible dans la batterie
recueilli est utilisé pour inverser la phase de la force contre-électromotrice
champs stator-rotor à une condition d'EMF vers l'avant, et par une impulsion,
et l'ajout d'accélération de moment cinétique du rotor et du volant. Dans le même temps, une partie de l'énergie
en excès recueillie dans la bobine est utilisée pour alimenter les charges
électriques telles que la charge d'une batterie et faire fonctionner une lampe
ou tout autre dispositif.
Il est bien connu que
la modification de la tension seul, crée un EMF de retour et ne nécessite aucun
travail. C'est parce que de changer
l'énergie potentielle ne nécessite pas de modification de la forme de cette
énergie potentielle, mais seulement son ampleur. Strictement parlant, le travail est le
changement de la forme d'énergie. Par
conséquent, aussi longtemps que la forme de l'énergie potentielle n'est pas
modifiée, l'amplitude peut être changée sans avoir à effectuer des travaux dans
le processus. Le moteur de la présente
invention tire profit de cette opération autorisée pour créer force
contre-électromotrice de façon asymétrique, et de ce fait modifie son énergie
potentielle disponible utilisable.
Dans un système
d'alimentation électrique, le potentiel (tension) est modifié par
l'introduction d'énergie pour faire des travaux sur les charges internes du
générateur ou batterie. Cette énergie
potentielle est dépensée à l'intérieur du générateur (ou batterie) pour obliger
les charges internes de l'autre, formant un dipôle source. Ensuite, le système en circuit fermé externe
connecté à cette source dipôle pompes maladroitement les électrons passées dans
la ligne de masse à travers l'EMF arrière du dipôle source, dispersant ainsi
les frais et tuer le dipôle. Cette coupe
le flux d'énergie à partir de la source dipôle au circuit externe. En conséquence de ce procédé classique, il
est nécessaire de remplacer l'entrée et de l'énergie supplémentaire pour
restaurer de nouveau le dipôle. Les
circuits utilisés actuellement dans la plupart des générateurs électriques ont
été conçus pour continuer à détruire le flux d'énergie en diffusant en
permanence l'ensemble des frais de dipôle et se terminant le dipôle. Par conséquent, il est nécessaire de
continuer à entrer dans le générateur d'énergie pour maintenir la restauration
de sa source dipolaire.
Une enquête de la
physique des particules est nécessaire pour voir ce qui fournit l'énergie au
circuit externe. Puisque ni une batterie
ni eux fournit un générateur d'énergie pour le circuit extérieur, mais ne
fournit que de l'énergie pour former le dipôle de source, une meilleure
compréhension du principe de l'énergie électrique est nécessaire pour bien
comprendre comment ces nouvelles fonctions motrices. Une batterie typique utilise l'énergie chimique stockée pour former la
source dipôle. Un générateur d'énergie
utilise l'entrée de l'arbre de rotation pour générer un champ magnétique
interne dans lequel les charges positives sont obligés de se déplacer dans une
direction et les charges négatives dans le sens inverse, en formant ainsi le
dipôle source. En d'autres termes,
l'apport d'énergie dans le générateur n'est rien d'autre que la forme de la
source dipolaire. Aucune partie de
l'énergie d'entrée passe dans le circuit externe. Si l'augmentation de courant est aspiré dans
la charge extérieure, il est aussi l'augmentation du flux d'électrons étant
passé à travers percuté le dipôle de source, détruire rapidement. Par conséquent, dipôle-restauration-énergie
doit être introduite rapidement.
L'énergie chimique de la batterie est également dépensée seulement de
séparer les charges internes et forment dipôle sa source. Là encore, si l'alimentation est aspiré dans
le courant de charge augmente et externe, il est augmenté flux d'électrons
étant passé à travers la battue de la source dipolaire, détruire rapidement. Il en résulte un appauvrissement de l'énergie
stockée de l'accumulateur plus vite, en le forçant à avoir à tenir le
rétablissement rapide du dipôle.
Une fois que le
générateur ou une source de batterie dipôle est formé (le dipôle est relié
également au circuit externe), il est bien connu en physique des particules que
le dipôle (le même que toute charge) est une symétrie brisée dans le flux
d'énergie du vide. Par définition, ce
qui signifie que la source de commandes et des extraits dipolaires partie de
cette énergie reçue à partir de son interaction à vide, et qui se déverse
énergie comme l'énergie circulant à travers tout l'espace entourant les
conducteurs externes dans le circuit ci-joint.
La plupart de cet énorme flux d'énergie flambée dans l'espace entourant
le circuit externe ne frappe pas le circuit du tout, et ne pas interceptés ou
utilisés. Ni est-il détourné dans le
circuit pour alimenter les électrons, mais transmet dans l'espace et est juste
"perdu". Seule une petite "gaine" de la circulation de
l'énergie le long de la surface des conducteurs frappe les charges de surface
dans les conducteurs et est ainsi dévié dans le circuit pour alimenter les
électrons. Les textes standard montrent
la composante énorme disponibles mais perdu flux d'énergie, mais seulement de
calculer la petite partie de la circulation de l'énergie qui frappe le circuit,
est pris par elle, et est utilisé pour l'alimenter.
Dans un circuit
typique, l'énorme disponibles mais " gaspillé " composant du flux
d'énergie est d'environ 10 à la puissance 13 fois plus grande que
la petite partie intercepté par les charges de surface et détournée dans le
circuit pour l'alimenter. Ainsi, autour
de chaque élément de circuit et le circuit comme une bobine, il existe un
énorme non-interceptée, flux non divergé énergie qui est beaucoup plus important
que le flux d'énergie à petite étant détournées et utilisées par le circuit ou
élément.
Ainsi, il existe un
énorme flux d'énergie inexploitée entourant immédiatement chaque circuit de
puissance FEM, à partir de laquelle l'excès d'énergie disponible peut être
intercepté et recueilli par le circuit, si les actions non-linéaires respectifs
sont initiés qui affectent fortement et augmenter la section efficace de
réaction croisée du circuit (c'est à dire, sa capacité à intercepter ce flux
d'énergie disponible mais habituellement perdue).
Le procédé dans lequel
le moteur de la présente invention modifie la section transversale de la
réaction des bobines dans le circuit, est d'une nouvelle utilisation, qui
change momentanément la section transversale de la bobine de réaction dans
lequel il est appelé. Ainsi, par ce
nouveau moteur en utilisant seulement une petite quantité de courant sous la
forme d'une impulsion de déclenchement, il est capable de susciter et commander
le changement immédiat de la section transversale de la réaction de la bobine
de cette composante d'écoulement de l'énergie normalement perdue. Par conséquent, le moteur capture et dirige
une partie de cette énergie de l'environnement généralement perdu, en
recueillant l'excès d'énergie disponible dans la batterie et ensuite la libérer
pour une utilisation dans le moteur. Par
moment et la commutation, la conception de porte novateur dans ce nouveau
moteur dirige l'excès d'énergie disponible, afin qu'il surmonte et renverse la
FEM de retour de la combinaison de pôles rotor-stator pendant ce qui serait
normalement le dos EMF et démontre la création du deuxième retour EMF du
système. Maintenant, au lieu d'une "égalité retard" force produite dans
la région arrière EMF, un EMF avant est produit qui est additif à l'énergie du
rotor / de volant et non soustractive. En bref, il
accélère encore le rotor / volant.
Il en résulte un champ
magnétique non-conservatrice long de la trajectoire du rotor. L'intégrale de la ligne du champ autour de ce
chemin (c'est à dire, le travail net sur le rotor / volant pour augmenter son
énergie et du moment angulaire) n'est pas zéro, mais une quantité
importante. Par conséquent, la création
d'un EMF arrière moteur magnétique impulsion asymétrique :
1) prend son excès d'énergie
disponible à partir d'une source externe connue, la grande partie
habituellement non interceptée de la circulation de l'énergie autour de la
bobine ;
2) augmente encore la
dipolarité source par ce retour EMF énergie ; et
3) produit flow
disponible de l'excès d'énergie directement de l'augmentation de symétrie
brisée du dipôle source dans son échange de l'énergie féroce avec le vide
local.
Pas de lois de la
physique ou la thermodynamique sont violés dans le procédé et le dispositif de
la présente invention, et la conservation de l'énergie s'applique
rigoureusement à tout moment. Néanmoins,
en agissant comme un système ouvert dissipatif pas en équilibre thermodynamique
avec le vide actif, le système peut recevoir de façon admissible disponible
excès d'énergie provenant d'une source connue de l'environnement et la
production de plus d'énergie à une charge de doivent être entrées par
l'opérateur seul. Comme un système
ouvert pas en équilibre thermodynamique, cette nouvelle et unique moteur peut
puiser dans l'arrière EMF à lui-même, les charges et les pertes dynamiser
simultanément, se conformer pleinement aux lois connues de la physique et de la
thermodynamique.
A la recherche de l'art
antérieur n'a pas révélé tous les périphériques qui recyclent l'énergie
disponible de fcem d'un générateur de moteur électromagnétique permanent tel
que décrit dans la présente invention. Cependant, l'art antérieur brevets
américains suivants ont été examinés :
1. No. 5,532,532 to DeVault, et al.,
Hermetically Sealed Super-conducting Magnet Motor.
2. No. 5,508,575 to Elrod, Jr., Direct Drive
Servovalve Having Magnetically Loaded Bearing.
3. No. 5,451,825 to Strohm, Voltage
Homopolar Machine.
4. No. 5,371,426 to Nagate et al., Rotor For
Brushless Motor.
5. No. 5,369,325 to Nagate et al., Rotor For
Brushless Electromotor And Method For Making Same.
6. No. 5,356,534 to Zimmermann, deceased et
al., Magnetic-Field Amplifier.
7. No. 5,350,958 to Ohnishi,
Super-conducting Rotating Machine, A Super-conducting Coil, And A
Super-conducting Generator For Use In A
Lighting Equipment Using Solar Energy.
8. No. 5,334,894 to Nakagawa, Rotary Pulse
Motor.
9. No. 5,177,054 to Lloyd, et al., Flux
Trapped Superconductor Motor and Method.
10. No. 5,130,595 to Arora, Multiple Magnetic
Paths Pulse Machine.
11. No. 4,980,595 to Arora, Multiple
Magnetics Paths Machine.
12. No. 4,972,112 to Kim, Brushless D.C.
Motor.
13. No. 4,916,346 to Kliman, Composite Rotor
Lamination For Use In Reluctance Homopolar,
And Permanent Magnet Machines.
14. No. 4,761,590 to Kaszman, Electric
Motor.
15. No. 4,536,230 to
Landa, et al., Anisotropic Permanent Magnets.
16. No. Re. 31,950 to Binns, Alternating
Current Generators And Motors.
17. No. 4,488,075 to DeCesare, Alternator
With Rotor Axial Flux Excitation.
18. No. 4,433,260 to Weisbord et al.,
Hysteresis Synchronous Motor Utilizing Polarized Rotor.
19. No. 4,429,263 to Muller, Low Magnetic
Leakage Flux Brushless Pulse Controlled D-C Motor.
20. No. 4,423,343 to Field, II, Synchronous
Motor System.
21. No. 4,417,167 to Ishii et al., DC
Brushless Motor.
22. No. 4,265,754 to Menold, Water Treating
Apparatus and Methods.
23. No. 4,265,746 to Zimmermann, Sr. et al.
Water Treating Apparatus and Methods.
24. No. 4,222,021 to Bunker, Jr., Magnetic
Apparatus Appearing To Possess a Single Pole.
25. No. 2,974,981 to Vervest et al.,
Arrester For Iron Particles.
26. No. 2,613,246 to Spodig, Magnetic
System.
27. No. 2,560,260 to Sturtevant et al.,
Temperature Compensated Magnetic Suspension.
RESUME DE
L'INVENTION
Le dispositif et le
procédé de la présente invention est un nouveau générateur permanent
électromagnétique du moteur qui recycle dos énergie EMF (recalibrage),
permettant ainsi au moteur de produire un niveau de COP de l'énergie = 0,98,
plus ou moins, en fonction de la configuration, des circuits, des éléments de
commutation et le nombre et la taille des stators, des rotors et des bobines
qui constituent le moteur. Le rotor est
fixé entre deux pièces polaires du stator.
Le moteur-générateur est initialement mis sous tension à partir d'un
petit moyen de batterie de démarreur, analogues à une bougie d'allumage, qui
envoie une petite quantité d'énergie pour le moteur, stimulant ainsi un
mouvement de rotation du rotor. Lorsque
le rotor tourne, l'énergie est captée à partir du champ électromagnétique
environnant contenant une onde d'impulsion asymétrique de force
contre-électromotrice. L'énergie
produite peut être captée et dirigée dans une de plusieurs directions,
notamment le retour de l'énergie à la batterie de démarrage initiale, la
rotation d'un arbre de travail et / ou l'envoi d'un courant pour alimenter un
ventilateur, ampoule ou autre tel dispositif.
BREVE
DESCRIPTION DES DESSINS
Fig.1 est la vue de
dessus d'une force contre-électromotrice du moteur-générateur électromagnétique
permanent avec un seul stator et un seul rotor.
Fig.1A est une vue de côté d'un capteur de roue de synchronisation à effet Hall
magnétique de force contre-électromotrice du moteur-générateur.
Fig.1B est une vue de
côté du rotor de la force contre-électromotrice du moteur-générateur.
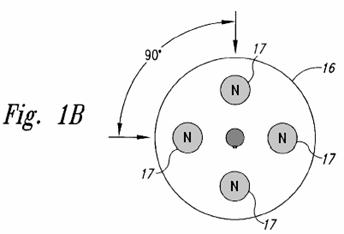
Fig.2 est un dessin schématique des circuits intégrant pour l'arrière EMF
moteur-générateur.
Fig.3 est un schéma
montrant les relations boîte de la force contre-électromotrice circuiterie de
générateur de moteur.

DESCRIPTION DETAILLEE DE L'INVENTION
La présente invention
est un dispositif et un procédé de création d'une force contre-électromotrice
moteur-générateur électromagnétique permanent.
Comme décrit dans les renseignements de base, ce nouveau générateur de
moteur est conforme à toutes les lois applicables électrodynamiques de la
physique et est en harmonie avec la loi de la conservation de l'énergie, les
lois de l'électromagnétisme et d'autres lois naturelles connexes.
La force
contre-électromotrice du moteur générateur électromagnétique permanent est
constitué d'une combinaison d'appareils électriques, la matière et des éléments
magnétiques, agencé pour capter de l'énergie électromagnétique disponible
(force contre-électromotrice) d'un redresseur à diode unique récupération ou à
partir de bobines de sortie. La capture
de retour EMF énergie est également connu comme " recalibrage ". Comme un point de départ arbitraire dans la
description de cette invention, une pile d'entrée, en tant que moyen de
l'énergie, transmet la puissance par le biais d'une puissance interrupteur
marche-arrêt et à un mécanisme de synchronisation, par exemple un commutateur
de synchronisation magnétique (un capteur magnétique à effet Hall à
semi-conducteur commutateur) qui est déclenché par un aimant sur une roue de
synchronisation. La roue de
synchronisation peut contenir n'importe quel nombre d'aimants (une ou
plusieurs), avec les pôles Sud tournées vers l'extérieur et aligné avec le
sélecteur de micros à effet Hall.
La roue de distribution
est monté à l'extrémité d'un arbre qui est situé le long de l'axe d'un rotor,
qui, à son tour, peut contenir un nombre quelconque d'aimants (par exemple deux
ou plus). Les aimants du rotor sont
disposés de sorte qu'ils aient la même polarité et sont équidistants les uns
des autres. Le corps a la roue de
distribution monté à une extrémité du rotor, et puis des moyens pour effectuer
un travail, par exemple une prise de force à l'extrémité opposée. Cependant, il existe d'autres modes de
réalisation dans lesquels la position du rotor, la roue de distribution et la
prise de force avoir d'autres configurations.
Le rotor est monté sur
une plate-forme ou d'un logement qui est fixé dans une position stationnaire à
l'intérieur d'un stator.
Le stator est constitué
d'un aimant permanent relié à un moyen pour conduire l'énergie
électromagnétique telle que deux barres parallèles, chaque barre comportant une
pièce polaire magnétisée à une extrémité.
Le matériau de conduction de la barre peut être ferreux, du fer en
poudre, en acier au silicium, l'acier inoxydable magnétique, des tôles de
matériau conducteur ou de tout autre matériau conducteur magnétique. Chaque barre a une bobine d'entrée placé autour
d'elle. La bobine peut être construit à
partir de cuivre, d'aluminium ou tout autre matériau conducteur approprié. La bobine primaire ou entrée est connectée au circuit de
commutation. Une deuxième bobine sur
le dessus de la bobine d'entrée est un enroulement secondaire ou de
sortie. L'enroulement secondaire ou de sortie est connecté au circuit de
redressement. Le rotor est situé
symétriquement entre les pièces polaires des barres du stator et contient une
série d'aimants ayant tous la même polarité, Nord ou Sud, avec chaque aimant du
rotor étant aligné avec la pièce polaire de la rotation du rotor.
Lorsque le rotor est
alimenté par la batterie du circuit de commutation, il existe un champ
magnétique initial qui est directement surmontée que les pièces polaires
aimantées sont alignées avec les aimants du rotor. Lorsque le rotor commence à se déplacer, ce
qui augmente l'énergie électromagnétique est produite par suite de gaiting flux
des aimants alignés du rotor et des pièces polaires. Les bobines entourant le bar " buck " l'aimant permanent
reliant les bars. Ceci est connu comme
le " buck booster " principe.
Quand l'aimant permanent est résisté par les bobines, on inverse la
polarité des pièces polaires qui sont alignées avec les aimants du rotor
entraînant le rotor pour augmenter sa vitesse de rotation. L'énergie disponible dans les champs qui
s'effondrent dans les bobines primaires et secondaires, (qui crée l'arrière EMF
dans le système), est maintenant en non-équilibre. L'énergie peut à présent être placé dans le système
par l'intermédiaire du circuit de commutation.
L'énergie disponible captée à partir de la force contre-électromotrice,
peut être appliquée dans différentes directions, y compris redynamiser la pile
d'entrée, le stockage dans un condensateur, la conversion par un redresseur de
récupération pour être stockée dans la pile d'entrée, un condensateur ou une
batterie d'accumulateurs ou de récupération.
Redresseurs de récupération sont utilisés pour convertir cette
alternatif en courant continu.
Disponible énergie peut être utilisée pour alimenter une ampoule
électrique, ventilateur ou toute autre utilisation.
L'arbre au centre du
rotor peut transférer de l'énergie sous la forme de travail à travers une prise
de force. La prise de force peut être
reliée à n'importe quel nombre d'arbres secondaires, des roues, des engrenages
et des courroies pour augmenter ou réduire le couple.
Il s'agit d'une
description de l'invention de base, cependant, il ya un nombre incalculable de
combinaisons et de modes de réalisation de stators, des rotors, des
commutateurs à effet Hall détection magnétique, bobines, redresseurs de
récupération et les modes de connexion électronique qui peut être combinée sur
un seul arbre ou plusieurs arbres reliés en diverses combinaisons et séquences,
et de différentes tailles. Il peut y
avoir un certain nombre de stators pour un rotor, (cependant, il ne peut y
avoir qu'un seul rotor actif si il ya un seul stator). Le nombre de commutateurs de ramassage à
effet Hall peut varier, par exemple, dans le cas de plusieurs stators de
bobines à haute résistance, les bobines peuvent être parallèles pour former une
bobine de faible résistance de sorte que d'un effet Hall pick-up avec un
circuit peut tirer tous les stators en même temps. Le nombre d'aimants à la fois la roue de
distribution et le rotor peut également varier en nombre, ainsi que la taille
et la puissance des aimants. N'importe
quel type d'aimant peut être utilisé. Le
nombre de spires des deux bobines d'entrée et de sortie sur chaque barre
conductrice peut également varier en nombre et en matériau conducteur.
Le moteur-générateur,
comme représenté sur la Fig.1, une vue d'un unique stator en perspective
de dessus, seul rotor arrière moteur EMF et est constitué d'un moyen de
fourniture d'énergie, tels que batteries d'entrée 10 relié à
l'interrupteur d'alimentation 11 (représentée sur la Fig.2) et à effet
Hall détection magnétique commutateur 13. Capteur magnétique 13 interfaces avec roue de synchronisation 12
pour former un commutateur de synchronisation. Roue de distribution 12 comporte
quatre aimants 14 avec le pôle Sud de l'aimant chaque tournée vers
l'extérieur vers capteur magnétique 13.
Timing roue 12 est fixée à une extrémité de l'arbre 15. Situé sur l'arbre 15 est rotor 16. Rotor 16 peut être de n'importe quelle
taille réaliste, et dans cet exemple, le rotor comporte quatre aimants de rotor
17. Les aimants du rotor 17 sont
agencés de sorte que tous possèdent la même polarité.
En face de la roue de
synchronisation 12 sur l'arbre 15 est un des moyens pour
effectuer un travail, par exemple une prise de force 18 du rotor 16 est
monté dans une position fixe avec les aimants du rotor 17 en alignement
avec les pièces polaires aimantée 19a et 19b. Chaque 19a et 19b pièce polaire est
relié à des barres de fer 20a et 20b.
Ces barres de fer sont reliées par un aimant permanent 21 de fil
est enroulé autour des barres de fer 20a et 20b pour former des bobines
d'entrée 22a et 22b. Superposée à
bobines d'entrée 22a et 22b sont des bobines de sortie 23a et 23b. Ces bobines de sortie sont connectés au pont
pleine onde d'abord une reprise redresseur 24a qui se connecte ensuite à
la batterie 10.
Fig.1A est une vue de
côté de la force contre-électromotrice du moteur générateur de la roue de
synchronisation 12 avec capteur à effet Hall magnétique 13 disposé
pour être déclenché par chacun des quatre aimants 14, à leur tour en
tant que roue de distribution 12 tourne.
Les aimants 14 ont
leurs pôles Sud face à l'extérieur et qu'ils sont régulièrement espacés avec
une séparation angulaire de 90 degrés.
Fig.1B est une vue de
côté du rotor 16 avec quatre aimants du rotor 17 avec un écart
angulaire de 90 degrés l'une de l'autre et ayant la même polarité.
Fig.2 est un schéma
de principe du circuit de générateur de moteur montrant les connexions de la
bobine d'entrée de la pile d'entrée 10 à travers le commutateur de
puissance 11, les transistors 30a, b, c les résistances 31a-e,
par alimentation conduire 32 (" VCC + ") et à capteur
magnétique 13 pick-up magnétique 13 est en alignement avec des
aimants de la roue de synchronisation 14 situés sur la roue de
synchronisation 12. Collector
conduire 33 et le câble de masse 34 transmettent les signaux de
capteur magnétique 13. Lorsque le
courant est inversé, il coule à travers la résistance 31e et le
transistor 30c à la batterie d'entrée 10. Bobines d'entrée 22a, b envoyer
pouvoir de pont pleine onde d'abord une reprise redresseur 24a qui
envoie la puissance à de récupération des interrupteurs 27 dans le
système, et / ou à l'entrée batterie 10 bobines de sortie 23a et 23b envoyer
de la puissance par le biais seule seconde diode récupération à redresseur 24b
batterie de récupération 25.
Dans ce mode de
réalisation particulier, le nombre des composants valeur et le type sont les
suivants :
À effet Hall capteur
magnétique interrupteur 13 est un n ° 3020;
Transistor 30a est un
2N2955;
Transistor 30b est une MPS8599;
Transistor 30c est un
2N3055;
Résistances 31a et 31b sont 470 ohms
Résistance 31b est de 2,2 K ohms
Résistance 31c est de 220 ohms
Résistance 31d est de 1 K ohms
Redresseur de récupération 24a est un 10 A,
400 volts pont redresseur.
Fig.3 est un schéma de boîte montrant le flux de la tension de l'entrée
batterie A, à travers le circuit de récupération B, circuit de
commutation C et moteur bobines bobines D. Moteur D envoyer l'énergie disponible de
FCEM à travers le circuit de récupération B, puis vers la guérison
batterie E et la batterie de l'entrée A. L'énergie disponible de FCEM peut aussi
découler de circuit de commutation C à la reprise circuit B.
Dans de nombreux systèmes de stator / rotor,
chaque stator individuel peut être excité à la fois une ou l'ensemble des
stators peut être mis sous tension simultanément. N'importe quel nombre de stators et rotors
peut être incorporé dans la conception de ces multiples stator / rotor de
générateur de combinaisons moteur.
Toutefois, s'il peut y avoir plusieurs stators par rotor, il ne peut y
avoir qu'un seul rotor pour un seul stator.
Le nombre de stators et rotors qui comprennent un générateur de moteur
particulier dépend de la quantité d'énergie nécessaire, sous la forme de
watts. La taille souhaitée et la
puissance du moteur détermine si les stators seront en parallèle ou séquentielle
tirée par le ramassage, ou micros à effet Hall magnétique. Le nombre d'aimants incorporés dans un rotor
particulier dépend de la taille du rotor et de la puissance requise du
moteur-générateur. Dans un stator / rotor du moteur générateur
multiple, la roue de distribution peut avoir un ou plusieurs aimants, mais doit
avoir un aimant à effet Hall pour chaque capteur stator si les stators sont pas
disposés en parallèle. L'EMF arrière
énergie est rendue disponible par l'inversion de la polarité des pièces
polaires aimantées s'effondrent ainsi le champ autour des bobines et d'inverser
le flux d'énergie aux diodes de récupération, qui capturent l'EMF arrière.
Les moteurs individuels peuvent être reliés
en séquence, chaque moteur ayant diverses combinaisons de stators et rotors, ou
ils peuvent être montés en parallèle. Chaque rotor
peut avoir un nombre quelconque d'aimants allant d'un minimum de 2 jusqu'à un
maximum de 60. Le nombre de stators pour
un moteur individuel peut varier de 1 à 60 avec le nombre de barres
conductrices allant de 2 à 120.
Ce qui distingue ce
moteur-générateur à partir de toutes les autres est la présence d'un aimant
permanent reliant les deux barres conductrices qui transfèrent de l'énergie
magnétique dans les pièces polaires du rotor, ce qui attire le rotor entre les
pièces polaires. Avec le rotor attiré
entre les deux pièces polaires, les bobines basculer la polarité du champ
magnétique des pièces polaires de telle sorte que le rotor est repoussé en
dehors. Il n'y a donc pas être courant
et la tension utilisée pour attirer le rotor.
Le seul courant étant utilisée est la répulsion du rotor entre les deux
pièces polaires à barres conductrices nécessitant ainsi seulement une petite
quantité de courant à repousser le rotor.
Ceci est connu comme " un système de recalibrage " et permet
la capture de l'énergie disponible de FCEM.
JOHN BEDINI: BATTERIE IMPULSION CHARGEUR
Demande de brevet US 2003/117111 26 Juin 2003 Inventeur: John C. Bedini
APPAREIL ET MÉTHODE POUR
RECHARGER UNE BATTERIE AVEC IMPULSIONS DE TENSION
ET POUR LA CONDUITE DES AUTRES
APPAREILS AVEC IMPULSIONS DE TENSION
Il s'agit d'une copie
légèrement modifiée de cette demande de brevet qui montre une méthode de
l'impulsion de recharge d'une banque de la batterie ou l'alimentation d'un
appareil de chauffage et / ou un moteur.
John Bedini est un génie intuitif avec la capacité pratique très
considérable, de sorte que toute l'information venant de lui doit être
considéré comme le plus grand soin. A la
fin de ce document, il est des informations supplémentaires non trouvée dans le
brevet.
RÉSUMÉ
Ce chargeur de batterie
à l'état solide à deux phases peut recevoir de l'énergie d'entrée à partir
d'une variété de sources, notamment de courant alternatif, une batterie, un
générateur de courant continu, un convertisseur CC-CC, des cellules solaires ou
de toute autre source compatible de l'énergie d'entrée. La phase 1 est la phase de charge et la phase
2 est la phase de décharge, où un signal, ou d'un courant, passe à travers un
commutateur de synchronisation double qui commande de façon indépendante les
deux canaux, ce qui produit deux phases.
L'interrupteur de
minutage est commandé par deux une puce logique, ou modulateur de largeur d'impulsion. Un potentiel de charge est autorisé à mettre
en place dans une banque de condensateur.
Le banc de condensateurs est ensuite déconnecté de la source d'entrée
d'énergie et une impulsion de haute tension est introduite dans la batterie qui
est là pour recevoir la charge. La
déconnexion momentanée de la capacité de la source d'énergie d'entrée permet
une charge potentiel flottant librement dans le condensateur. Une fois que le condensateur a fini de
décharger la charge dans le potentiel de la batterie, la déconnexion du
condensateur de charge de la batterie et re-connecte à la source d'énergie, en
complétant ainsi le cycle à deux phases.
DOMAINE
TECHNIQUE
Cette invention se
rapporte généralement à une batterie d'impulsion chargeur en utilisant un dispositif
à semi-conducteurs et de la méthode où la quantité de courant de la batterie
n'est pas constante. Le signal ou courant est interrompu
momentanément enclenchement lorsqu'il s'écoule à travers l'une ou l'autre
premier canal, (la phase de charge), ou le second canal, (la phase de
décharge). Ce cycle à deux phases
alterne le signal dans les deux canaux permettant ainsi un potentiel de charge
dans un condensateur de se déconnecter de sa source d'alimentation un instant
avant le condensateur se décharge son énergie potentielle emmagasinée dans une
batterie mis en place pour recevoir l'énergie stockée dans le
condensateur. Le condensateur est
ensuite déconnecté de la batterie et re-reliée à la source d'énergie lors de
l'achèvement de la phase de décharge, achevant ainsi le cycle de
charge-décharge. La batterie-chargeur
impulsion peut également entraîner des dispositifs, tels qu'un moteur et un
élément de chauffage, avec des impulsions.
CONTEXTE ET
ÉTAT DE LA TECHNIQUE
Présenter les chargeurs
de batterie de jour utilisent un courant de charge constant à leur
fonctionnement sans interruption momentanée du signal ou du courant lorsqu'il
s'écoule soit: (1) à partir d'une source d'énergie primaire pour le chargeur;
ou (2) à partir du chargeur lui-même dans une pile destinée à recevoir la
charge. Certains chargeurs sont
réglementées à un courant constant par l'un de plusieurs méthodes, tandis que
d'autres sont constants et ne sont pas réglementés. Il n'y a pas de chargeurs de batterie
actuellement dans l'art ou la disposition dans laquelle il ya un signal
momentané ou déconnexion du courant entre la source d'énergie primaire et le
chargeur condensateurs un instant avant que les condensateurs se déchargent
l'énergie potentielle emmagasinée dans une batterie recevoir la charge
d'impulsion. Il n'existe pas non
chargeurs dans l'art que Débranchez le chargeur de la batterie recevoir la
charge lorsque les condensateurs du chargeur reçoivent de l'énergie de la
source primaire. L'interruption de
courant momentanée permet à la batterie d'une "période de repos" à
court et nécessite moins d'énergie de la source d'énergie primaire en mettant
plus d'énergie dans la batterie recevoir la charge tout en exigeant une plus
courte période de temps pour le faire.
RESUME DE L'INVENTION
Un aspect de
l'invention concerne un dispositif à semi-conducteurs et de la méthode pour
créer un courant d'impulsion à charge d'une batterie ou d'un groupe de
batteries dans lequel une méthode nouvelle et unique est utilisé pour augmenter
et préserver, pendant une période de temps plus longue, l'énergie stockée dans
la batterie, par rapport à des chargeurs de batterie à courant constant. Le dispositif utilise une impulsion temporisé
pour créer une forme d'onde d'impulsion CC à être déchargée dans la batterie
recevoir la charge.
Un mode de réalisation
de l'invention utilise un moyen de double commutation comme un modulateur de
largeur d'impulsion (PWM), par exemple, un SG3524N PWM puce logique, et un
moyen de couplage optique à une batterie de condensateurs à haute énergie pour
stocker une première minuterie chargé d'impulsion. Il s'agit de la phase de
charge, ou la phase 1. La banque de
condensateur chargé se décharge alors l'énergie stockée dans la haute pile
recevoir la charge à impulsions chronométré.
Juste avant de décharger l'énergie stockée dans la batterie, la batterie
de condensateurs est momentanément déconnecté de la source d'alimentation
électrique, complétant ainsi la phase de charge, et en laissant ainsi la
batterie de condensateurs comme une redevance potentiel flottant déconnecté de
la source d'énergie primaire pour être ensuite déversées dans la batterie. Le transfert d'énergie de la batterie de
condensateurs à la batterie complète la phase de décharge, ou de la phase 2, le
cycle à deux phases se répète à présent.
Ce mode de réalisation
fonctionne de la batterie-chargeur impulsion de transférer de l'énergie
provenant d'une source, telle qu'une source de courant alternatif, à une source
de courant continu non filtrée de la haute tension devant être stockée dans un
condensateur ou une batterie de condensateurs. Un régulateur de commutation est
réglée à une impulsion temporisée, par exemple, une seconde impulsion qui est à
180 degrés hors de phase pour chaque ensemble de fonctions de commutation. La première fonction est de construire la
charge de la batterie de condensateurs de la source d'énergie primaire; la
deuxième fonction consiste à déconnecter la source de la batterie de
condensateurs de puissance; la troisième fonction est de décharger la haute
tension stockée à la batterie avec une pointe de haute tension en une impulsion
synchronisée, par exemple, une impulsion d'une seconde; et la quatrième
fonction est de re-connecter la batterie de condensateurs à la source d'énergie
primaire.
Le dispositif
fonctionne à travers un canal à deux Sur/De mécanisme ou un / fonction de
ré-évaluer jaugeage dans lequel le chargeur est débranché de sa source
d'énergie primaire un instant avant que l'impulsion chargeur de commutation
libère l'impulsion de haute énergie dans la batterie à charger. Comme le commutateur de charge primaire se
ferme, l'interrupteur de décharge secondaire est ouverte et vice-versa à des
impulsions cadencées pour compléter le cycle à deux phases.
Les moyens pour une alimentation
est variée avec plusieurs options disponibles comme source d'énergie
primaire. Par exemple, l'énergie
primaire d'entrée peut provenir d'une source de courant alternatif reliée à la
bonne tension (transformateur); à partir d'un générateur de courant alternatif;
à partir d'une batterie d'alimentation primaire; à partir de cellules solaires;
un onduleur de courant continu-continu; ou de toute autre source d'énergie
adaptée. Si un transformateur est la
source d'énergie d'entrée primaire, puis il peut être un transformateur de
rectification standard utilisé dans des applications d'alimentation ou de tout
autre transformateur applicables à la fonction désirée. Par exemple, il peut être de 120 volts à 45
volts CA transformateur abaisseur, et le redresseur peut être un pont pleine
onde de 200 volts à 20 ampères, ce qui est filtré lorsqu'il est connecté à la
sortie du transformateur. La borne de
sortie positive du pont redresseur est reliée aux drains des transistors à
effet de champ connectés en parallèle, et la borne négative est reliée à la
borne négative de la batterie de condensateurs.
Les commutateurs à transistors à effet de
champ (FET) peuvent être IRF260 FET, ou tout autre FET nécessaires pour
accomplir cette fonction. Tous les
transistors FET sont connectés en parallèle pour obtenir la capacité de réglage
de courant appropriée pour les impulsions.
Chaque FET peut être connecté via un 7 watts, résistance de 0,05 ohms
avec une connexion de bus commun à la source.
Toutes les grilles de FET peut être relié à travers une résistance 240 ohms
à un bus commun. Il peut également y
avoir une résistance 2 K ohms fil entre les grilles de FET et le bus de drain.
Un transistor, par
exemple un MJE15024, peut être utilisée comme un conducteur pour les portes, le
bus d'entraînement, et, à son tour, un coupleur optique pouvoirs le transistor
d'attaque par l'intermédiaire du premier canal.
Un premier commutateur de charge est utilisé pour charger la batterie de
condensateurs, qui agit comme une source de potentiel CC à la batterie. Le banc de condensateurs est alors déconnecté du circuit
redresseur. Le chargeur de batterie
d'impulsion est ensuite transféré à un second commutateur à effet de champ par
l'intermédiaire du second canal pour la phase de décharge. La phase de refoulement est entraîné par un
transistor, et que le transistor est commandé par l'intermédiaire d'un coupleur
optique. Lorsque le second (décharge)
commutateur est activé, la charge potentielle de banque de condensateur est
déchargé dans la batterie en attendant de recevoir la charge. La batterie recevoir la charge est alors
déconnecté de la batterie de condensateurs impulsion de chargeur pour répéter
le cycle. Le chargeur d'impulsion peut
avoir n'importe quelle source appropriée de puissance d'entrée comprenant :
(1) Les panneaux
solaires pour augmenter la tension de la batterie de condensateurs;
(2) une éolienne;
(3) un CC-to-CC onduleur;
(4) un alternateur;
(5) un moteur-générateur à courant
alternatif;
(6) une source statique, comme une étincelle
haute tension; et
(7) d'autres
dispositifs qui peuvent augmenter le potentiel de la batterie de condensateurs.
Dans un autre mode de
réalisation de l'invention, on peut utiliser le chargeur d'impulsions pour
piloter un dispositif, tel qu'un moteur ou un élément de chauffage avec des
impulsions d'énergie.
BREVE DESCRIPTION DES DESSINS
Fig.1 est un dessin
schématique d'une impulsion à l'état solide, le chargeur selon un mode de
réalisation de l'invention.
Fig.2 La figure 1
est un schéma de principe d'un convertisseur classique continu-courant continu
qui peut être utilisé pour fournir la puissance à l'impulsion chargeur de Fig.1
selon un mode de réalisation de l'invention.
Fig.3 est un dessin schématique d'une alimentation en courant alternatif
conventionnel qui peut être utilisé pour fournir la puissance à l'impulsion
chargeur de Fig.1 selon un mode de réalisation de l'invention.
Fig.4A à Fig.4D sont des dessins schématiques d'autres
alimentations classiques qui peuvent être utilisés pour fournir la puissance à
l'impulsion chargeur de Fig.1 selon un mode de réalisation de
l'invention.
Fig.5 est un schéma
de principe de l'impulsion à l'état solide chargeur de Fig.1 selon un
mode de réalisation de l'invention.
Fig.6 est un schéma d'un moteur à courant continu que le chargeur
d'impulsions de Fig.1 peut conduire, selon un mode de réalisation de
l'invention.

Fig.7 est un schéma
d'un élément de chauffage que le chargeur d'impulsions de Fig.1 peut
conduire, selon un mode de réalisation de l'invention.
DESCRIPTION
DETAILLEE DE L'INVENTION
Un mode de réalisation
de la présente invention est un dispositif et un procédé pour une impulsion
chargeur à l'état solide qui utilise une charge potentielle stockée dans une
batterie de condensateurs. À l'état solide impulsion chargeur comprend
une combinaison d'éléments et les circuits pour capturer et stocker l'énergie
disponible dans une batterie de condensateurs.
L'énergie stockée dans les condensateurs est alors chargée par impulsions
dans la batterie à charger. Dans une
version de ce mode de réalisation, il existe une première coupure momentanée
entre le chargeur et la batterie de réception de la charge au cours de la phase
de charge du cycle, et une seconde coupure momentanée entre le chargeur et la
source d'énergie d'entrée au cours de la phase de refoulement du cycle .
En tant que point de
départ, et un procédé arbitraire dans la description de ce dispositif et le
procédé, le débit d'un signal ou d'un courant électrique sera suivi de l'apport
d'énergie primaire pour le stockage définitif dans la pile de réception de la
charge d'impulsion.
Fig.1 est un dessin
schématique de l'impulsion à l'état solide-chargeur selon un mode de
réalisation de l'invention. Comme le
montre la Fig.1, la principale source d'énergie d'entrée pour le
chargeur d'impulsions est une source d'alimentation 11, dont des
exemples sont représentés sur la Fig.2, la Fig.3, et Fig.4A à
Fig.4D. Une batterie de 12 volts,
comme une source d'énergie basse tension 12, entraîne un moyen de contrôle de
commutation double comme une puce logique ou une impulsion à modulateur de
largeur (PWM) 13.
En variante, la tension
de l'alimentation électrique 11 peut être converti en une tension
appropriée pour alimenter le PWM 13.
La MLI 13 peut être une puce logique de SG3524N, et fonctionne comme un
oscillateur ou d'une minuterie pour entraîner une sortie à 2 canaux avec
" Sur / De "commutateurs qui
sont connectés quand le soit à un premier isolateur optique 14, ou
encore, à un deuxième isolateur optique 15 Les premier et second
isolateurs optiques 14 et 15 peuvent être isolateurs optiques
H11D3. Lorsque la puce de logique 13 est
reliée à un premier canal, il est déconnecté d'un second canal, ce qui entraîne
dans les deux phases de direction de signal; la phase 1, une phase de charge,
et de la phase 2, une phase de décharge.
Lorsque la puce de
logique 13 est mis à la phase de charge, le signal de flux pour le
premier isolateur optique 14 de l'isolateur optique 14, le signal
continue son écoulement à travers un premier transistor de puissance NPN 16 qui
active un MOSFET 18a à canal N et un N MOSFET à canal 18b. De passage de courant à travers le MOSFET 18a
et 18b accumule une tension aux bornes d'une batterie de condensateurs 20,
ce qui achève la phase de charge de l'activité de commutation.
La phase de refoulement
commence quand la puce de logique 13 est commuté vers le second canal,
avec un courant circulant vers le second isolateur optique 15, puis à
travers un second transistor de puissance NPN 17, qui actionne un
transistor MOSFET 19a à canal N et un transistor MOSFET 19b à
canal N . Après la puce logique 13 ferme le premier canal et ouvre le
second canal, le potentiel de charge à la batterie de condensateurs 20 flotte
librement entre la source d'alimentation 11, à partir de laquelle la
batterie de condensateurs 20 est maintenant déconnectée, et ensuite
relié à une batterie de 22 à recevoir la charge. C'est à ce moment que le potentiel de charge
dans la batterie de condensateurs 20 est évacué par une impulsion de
haute énergie dans la batterie 22 ou, une banque (non représenté) de
piles. La phase de décharge est terminée
une fois que la batterie 22 reçoit la charge. La puce logique 13 passe alors le
deuxième canal fermé et ouvre le premier canal complétant ainsi le cycle de
charge-décharge. Le cycle est répété
avec la puce de logique 13 commandant la direction du signal dans chaque
canal à une batterie de condensateurs ou de la deuxième chaîne de la batterie 22
à partir de la batterie de condensateurs.
La batterie 22 est une période de repos momentané sans un courant
continu au cours de la phase de charge.
Les valeurs des
composants pour le mode de réalisation décrit sont les suivants. Les résistances 24, 26,. . . 44b ont
les valeurs respectives suivantes: 4.7k, 4.7k, 47K, 330, 330, 2K, 47, 47, 0.05
(7W), 0,05 (7W), 2K, 47, 47, 0,05 (7 W), et de 0,05 (7W). Le potentiomètre 46 est de 10K, le
condensateur 48 est 22 mF, et la capacité totale de la batterie de
condensateurs 20 est 0.132F. La
tension de la batterie 22 est comprise entre 12 à 24 V, et la tension de
l'alimentation électrique 11 est de 24 à 50 V de telle sorte que la
tension d'alimentation est d'environ 12 à 15 V supérieure à la tension de la
batterie.
D'autres modes de
réalisation de l'impulsion-chargeur sont envisagés. Par exemple, les transistors bipolaires 16
et 17 peuvent être remplacés par des transistors à effet de champ, et les
transistors 18a, 18b, 19a, et 19b peuvent être remplacés par bipolaire
ou bipolaire à grille isolée (IGBT), des transistors. En outre, on peut modifier les valeurs des
composants pour modifier le temps de cycle, la tension d'impulsion de pointe,
la quantité de charge que la batterie de condensateurs 20 délivre à la
batterie 22, etc. En outre,
l'impulsion chargeur peut avoir un ou plus de deux les transistors 18a et
18b, et une ou plus de deux transistors 19a et 19b.
Toujours en référence à
la Fig.1, le fonctionnement du mode de réalisation décrit ci-dessus,
l'impulsion de chargeur est discutée.
Pour commencer la première phase du cycle au cours de laquelle la
batterie de condensateurs 20 est chargé, le circuit logique 13 désactive
l'isolateur 15 et actionne le sectionneur 14. Typiquement, le circuit 13 est
configuré pour désactiver l'isolateur 15 avant ou en même temps que il
active l'interrupteur principal 14, bien que le circuit 13 peut
être configuré pour désactiver l'isolateur 15 après qu'elle active
l'isolateur 14.
Puis, l'isolateur 14
activée génère un courant de base qui active le transistor 16 qui à
son tour génère un courant qui active les transistors 18a et 18b. Les transistors 18a et 18b activé
charger les condensateurs de la batterie 20 à une tension de charge
égale ou approximativement égale à la tension de l'alimentation électrique 11
inférieure la plus basse de la tension de seuil des transistors 18a et
18b. Pour commencer la seconde phase
du cycle au cours de laquelle l'impulsion de la batterie de condensateurs 20
charge la batterie 22, le circuit logique 13 désactive
l'isolateur 14 et actionne le sectionneur 15. Typiquement, le circuit 13 est
configuré pour désactiver l'isolateur 14 avant ou à l'en même temps
qu'il actionne le sectionneur 15, bien que le circuit 13 peut
être configuré pour désactiver l'isolateur 14 après qu'elle active
l'isolateur 15.
Puis, l'isolateur 15
activée génère un courant de base qui active le transistor 17 qui à
son tour génère un courant qui active les transistors 19a et 19b. Les transistors 19a et 19b activé
décharge les condensateurs de la batterie 20 dans la batterie 22 jusqu'à
ce que la tension aux bornes de la banque est de 20 ou est
approximativement égale à la tension aux bornes de la batterie 22 ainsi
que la plus faible tension de seuil des transistors 19a et 19b. Sinon, le circuit 13 peut désactiver
l'isolateur 15 à un moment avant que la banque 20 atteint ce
niveau de décharge. Etant donné que les
résistances des transistors 19a et 19b, les résistances 44a et 44b,
et la batterie 22 sont relativement faibles, les condensateurs dans la
décharge banque 20 plutôt rapidement, délivrant ainsi une impulsion de
courant pour recharger la batterie 22 par exemple, où l'impulsion
chargeur comprend des éléments ayant les valeurs indiquées ci-dessus, la banque
20 délivre une impulsion de courant d'une durée d'environ 100 ms et un
pic d'environ 250 A.
Fig.2 est un dessin
schématique d'un CC-CC converter classique 30 qui peut être utilisé comme
source d'alimentation 11 de la Fig.1 selon un mode de réalisation
de l'invention. Convertisseur
continu-continu convertit une tension continue basse en une tension continue
plus élevée ou vice-versa. Par
conséquent, un tel convertisseur permet de convertir une basse tension en une
tension plus élevée que le chargeur d'impulsions de la Fig.1 peut
utiliser pour charger la batterie de condensateurs 20 (Fig.1). Plus précisément, le convertisseur 30 reçoit
de l'énergie provenant d'une source 31, telle qu'une batterie de 12
volts. Un capteur d'isolateur optique 33
commande un transistor de puissance NPN, qui fournit un courant à un
enroulement primaire 36 d'un transformateur de puissance 32. A de la puce de logique ou de la largeur
d'impulsion modulateur (PWM) 34 commute alternativement sur et en dehors
d'un MOSFET 35a IRF260 premier canal N et un deuxième MOSFET à canal N
IRF260 35b de telle sorte que lorsque le MOSFET 35a 35b est sur
le MOSFET est hors tension et vice-versa.
Par conséquent, le MOSFET de commutation 35a et 35b conduire
sections respectives de l'enroulement primaire 36 pour générer une
tension de sortie aux bornes d'une bobine secondaire 38 un pont à double
alternance redresseur 39 redresse la tension aux bornes du bobinage
secondaire 38, et cette tension redressée est prévu pour l'impulsion
chargeur de la Fig.1. En outre,
l'enroulement secondaire 38 peut être exploité pour fournir une tension
inférieure à la MLI 13 de la Fig.1 de telle sorte que le courant
continu en courant continu le convertisseur 30 peut être utilisé à la
fois l'alimentation électrique 11 et l'alimentation à basse tension 12
de la Fig.1.
Fig.3 est un dessin
schématique d'une alimentation en courant alternatif 40 qui peut être
utilisé à la fois l'alimentation électrique 11 et l'alimentation 12 de
la Fig.1 selon un mode de réalisation de l'invention. L'entrée d'alimentation 42 à
l'alimentation 40 est de 120 V CA.
Un premier transformateur 44 et redresseur 46 composent
l'alimentation 11, et un second transformateur 48, redresseur 50,
et le régulateur de tension 52 composer l'alimentation 12.
Fig.4A à Fig.4D sont des
dessins schématiques de diverses sources classiques d'entrée d'énergie
primaire, qui peuvent être utilisés comme l'alimentation 11 et / ou
l'alimentation 12 de la Fig.1 selon un mode de réalisation de
l'invention. La Fig.4A est un
dessin schématique de batteries couplées en série. La Fig.4B est une représentation
schématique de cellules solaires en série couplés. Fig.4C est un dessin schématique d'un
générateur de courant alternatif, et Fig.4D est un dessin schématique
d'un générateur de courant continu.
Fig.5 est un schéma
de principe de la semi-conducteurs impulsion chargeur de la Fig.1 selon
un mode de réalisation de l'invention.
Le bloc A est la source d'alimentation 11, qui peut être
n'importe quel bloc d'alimentation approprié, tel que ceux représentés sur la Fig.2,
Fig.3, et Fig.4A à Fig.4D.
Le bloc B est le bloc d'alimentation 12, qui peut être
n'importe quelle source d'alimentation appropriée telle qu'une alimentation de
12 V en courant continu ou l'alimentation représentée sur la Fig.3. Bloc C est le PWM 13 et ses
composants périphériques. Le bloc D
est le commutateur de charge qui comprend la première puce optique d'isolateur 14,
le premier transistor de puissance NPN 16, le premier ensemble de deux
transistors MOS à canal N 18a et 18b, et leurs résistances
périphériques. Bloc E est la
batterie de condensateurs 20.
Bloc F est le commutateur de décharge comprenant la deuxième puce
optique d'isolateur 15, le second transistor de puissance NPN 17,
le deuxième ensemble de deux transistors MOS à canal N 19a et 19b, et
leurs résistances périphériques. Bloc G
est la banque de la batterie ou de la batterie 22 qui est en cours
d'impulsion chargé.
Une caractéristique
unique qui distingue une forme de réalisation du chargeur d'impulsions décrite
ci-dessus, à partir de chargeurs classiques est la méthode de chargement de la
batterie avec des impulsions de courant au lieu d'avec un courant continu. Par conséquent, la batterie est donnée une
période de réinitialisation entre les impulsions.
Fig.6 est un schéma
d'un moteur à courant continu 60 que le chargeur d'impulsions de la Fig.1
peut conduire, selon un mode de réalisation de l'invention. Plus précisément, on peut connecter le moteur
60 à la place de la batterie 22 (Fig.1) de telle sorte que
le chargeur d'impulsions pour alimenter le moteur avec des impulsions de
courant. Bien que l'on n'a pas besoin de
modifier l'impulsion chargeur pour entraîner le moteur 60, on peut le
modifier pour le rendre plus efficace pour entraîner le moteur. Par exemple, on peut modifier les valeurs des
résistances à la PWM périphérique 13 (Fig.1) pour faire varier la
largeur et la crête des impulsions d'entraînement à partir de la batterie de
condensateurs 20 (Fig.1).
Fig.7 est un schéma
d'un élément de chauffage 70, tel qu'un élément de la sécheuse ou de
l'eau de chauffage, que le chargeur d'impulsions de la Fig.1 peut
conduire, selon un mode de réalisation de l'invention. Plus précisément, on peut relier l'élément de
chauffage 70 à la place de la batterie 22 (figure 1) de telle
sorte que le chargeur d'impulsions entraîne l'élément avec des impulsions de
courant. Bien que l'on n'a pas besoin de modifier l'impulsion chargeur pour
entraîner l'élément 70, on peut le modifier pour le rendre plus efficace pour
entraîner l'élément. Par exemple, on peut modifier les valeurs des résistances
à la PWM périphérique 13 (figure 1) pour faire varier la largeur et la crête
des impulsions d'entraînement à partir de la batterie de condensateurs 20 (Fig.1).
Dans les modes de réalisation
décrits ci-dessus, les éléments et les composants électroniques spécifiques
sont utilisés. Cependant, il est connu
que de nombreux transistors disponibles, des résistances, des condensateurs,
des transformateurs, des composants de synchronisation, des isolateurs
optiques, les modulateurs de largeur d'impulsion, des MOSFET, et d'autres
composants électroniques peuvent être utilisés dans une variété de combinaisons
pour obtenir un résultat équivalent.
Enfin, bien que l'invention ait été décrite en référence particulière
des moyens, des matériaux et des modes de réalisation, il doit être entendu que
l'invention n'est pas limitée aux détails décrits, et s'étend à tous les
équivalents à l'intérieur du cadre des revendications.
Notes :
L'information suivante
n'est pas partie du brevet de John.
C'est une information destinée à être utile, mais il ne vient pas de
John, il doit être considéré comme opinion et non un fait. Dans les schémas ci-dessus, le circuit de
SG3524N intégré est susceptible d'être familier à beaucoup de lecteurs, et un
examen de la fiche technique ne fait-il pas évident que des connexions de
broches sont utilisés dans le circuit de John.
Les connexions de
broches suivantes sont considérées comme exactes, mais ne peuvent être
garantis.
En plus de ces
connexions de broches de SG3524N, il est suggéré que les repères 1, 4 et 5,
soit relié à la terre au lieu d'un axe 8, et en ce qu'un condensateur de 100nF
être connectée à la masse la broche 9.
Pins 3 et 10 sont laissées libres.
Les broches de la puce sont :
