Una Guida Pratica
ai Dispositivi di Energia-Libera
Autore: Patrick J. Kelly
Capitolo
1:
Una cosa che ci viene detto, è che i magneti permanenti non può fare qualsiasi lavoro. Oh, sì, i magneti possono sostenere contro la forza di gravità quando si attaccano sul vostro frigorifero, ma, ci viene detto, non possono fare qualsiasi lavoro. Davvero?
Cos'è un magnete permanente? Beh, se si prende un pezzo di adatto materiale
come l'acciaio 'mite', metterlo all'interno di una bobina di filo e guidare una
forte corrente elettrica attraverso la bobina, quindi che converte l'acciaio in
un magnete permanente. Quale lunghezza
di tempo fa l'attuale necessità di essere nella bobina per fare il magnete? Meno di un centesimo di secondo. Quanto tempo il magnete risultante può
supportare il proprio peso contro la gravità? Anni e anni. Non che colpisca voi come strano? Vedere quanto tempo si può sostenere il peso
del corpo contro gravità prima di arrivare stanchi. Anni e anni? No. Mesi, poi? No. Giorni, anche? No.
Beh, se non puoi farlo, come mai può il magnete? Lei suggerisce che un singolo impulso per un
minuto frazione di secondo può pompare abbastanza energia nel pezzo di acciaio
per alimentarlo per anni? Che non sembra
molto logico, lo fa? Così, come fa la
calamita per farlo?
La risposta è che il magnete non effettivamente
esercitare alcun potere a tutti. Allo
stesso modo che un pannello solare non mettere qualsiasi sforzo nella
produzione di energia elettrica, la potenza di un magnete fluisce dall'ambiente
e non dal magnete. L'impulso elettrico
che crea il magnete, allinea gli atomi all'interno d ell'acciaio e crea un
"dipolo" magnetico che ha lo stesso effetto che fa il
"dipolo" di una batteria elettrico. Polarizzano l'ambiente
quantistico che lo circonda e provoca grandi flussi di flusso di energia
intorno a sé. Uno degli attributi di
questo flusso di energia è ciò che chiamiamo "magnetismo" e che permette
il magnete ad attaccare sulla porta del vostro frigorifero e sfidare la gravità
per anni sull'estremità.
Diversamente la batteria, non metterlo in una posizione in cui distrugge immediatamente il suo dipolo propria, così come risultato, l'energia scorre attorno al magnete, praticamente all'infinito. Ci è stato detto che i magneti permanenti non possono essere utilizzati per fare un lavoro utile. Questo non è vero.

Shenhe Wang Motore a Magneti
Permanenti.
Questa è una foto di un uomo cinese, Shenhe Wang, che ha progettato e costruito un generatore elettrico di cinque KW. Questo generatore è alimentato da magneti permanenti e quindi non utilizza carburante per far funzionare. Esso utilizza particelle magnetiche sospese in un liquido. Avrebbe dovuto essere esposti al pubblico presso il World Expo di Shanghai dal 1 ° maggio 2010 al 31 ottobre 2010, ma il governo cinese è intervenuto e non lo permettono. Al contrario, essi permettono solo gli mostrano un orologio da polso in formato versione che ha dimostrato che il progetto ha funzionato, ma che non sarebbe di alcuna utilità pratica nella produzione di energia:

La maggior parte degli inventori non sembrano rendersene conto, ma quasi tutti i governi si oppongono a fare conoscere al pubblico di qualsiasi serio free-energy dispositivo (anche se sono felice di usare questi dispositivi loro stessi). Il loro obiettivo è quello di dominare e controllare la gente comune e un fattore importante in che è quello di controllare l'offerta e il costo di energia. Un secondo metodo utilizzato in tutto il mondo è quello di controllare il denaro, e senza accorgersene, i governi riescono a portare via circa il 78% del reddito delle persone, soprattutto con metodi nascosti, imposte indirette, tasse, canoni, ... Se vuoi sapere di più su di esso, quindi visitare www.yourstrawman.com ma vi prego di capire che il motivo per cui la free-energy dispositivi non sono in vendita nel vostro negozio locale ha a che fare con il controllo politico e di libero passaggio degli interessi finanziari e non ha nulla a che fare con la tecnologia. Tutti i problemi tecnologici sono stati risolti, letteralmente migliaia di volte, ma i benefici sono stati soppressi da chi è al potere.
Due del signor Wang 5 generatori chilowatt hanno completato con successo il programma "Affidabilità e sicurezza" , il test obbligatorio del governo cinese di sei mesi nel mese di aprile 2008. Un grande consorzio cinese ha iniziato a comprare centrali elettriche a carbone in Cina, al fine di ristrutturare con versioni di grandi dimensioni l'inquinamento-free generatore di Wang. Alcune informazioni sulla costruzione del motore Wang è disponibile qui: http://www.free-energy-info.tuks.nl/Wang.pdf.


Il motore è costituito da un rotore che ha quattro braccia e che si trova in un piatto fondo di liquido che ha una sospensione colloidale di particelle magnetiche in esso:

C'è un brevetto sul motore, ma non è in inglese e ciò che rivela non è una quantità principale.
E 'stata l'intenzione del sig Wang a dare il suo progetto del motore a tutti i paesi del mondo e invitarli a farlo da soli. Questo atteggiamento molto generoso non tiene in considerazione i molti interessi finanziari in ogni paese, non ultimo dei quali è il governo di quel paese, che si oppongono all'introduzione di qualsiasi dispositivo che si inserisce nella free-energy e che, di conseguenza, potrebbe distruggere i loro flussi continui di reddito. E 'anche possibile che non sarebbe stato permesso di andare in Cina, comprare uno e portarlo con voi per l'uso domestico.
Non è facile da organizzare magneti permanenti in un modello che può fornire una forza costante in un'unica direzione, come si tende ad essere un punto in cui le forze di attrazione e repulsione equilibrio e producono una posizione in cui il rotore si stabilizza ebastoncini. Ci sono vari modi per evitare che ciò accada. È possibile modificare il campo magnetico deviando attraverso un componente di ferro dolce.
Ci sono molti altri disegni di motore a magneti permanenti, ma prima di mostrare alcuni di essi, probabilmente vale la pena discutere quanto lavoro utile può essere eseguita dall'albero rotante di un motore a magneti permanenti. Con un motore a magneti permanenti costruito in casa, in cui componenti economici sono stati utilizzati e la qualità della lavorazione non può essere tutto così grande (anche se questo non è sicuramente il caso dei lavori in casa), la potenza all'albero non può essere molto elevata. Generazione di energia elettrica è un obiettivo comune, e che può essere ottenuto facendo passare magneti permanenti per bobine di filo. Il più vicino alle bobine di filo, maggiore è la potenza generata in tali bobine. Purtroppo, facendo questo crea resistenza trascinamento magnetico e che aumenta con la quantità di corrente elettrica è fornita dalle bobine.
Ci sono modi per ridurre questo peso per la rotazione dell'albero. Un modo è quello di utilizzare un Ecklin-Brown generatore elettrico in cui la rotazione dell'albero non passa i magneti per le bobine, ma invece, sposta uno schermo magnetico che blocca alternativamente e ripristina un percorso magnetico attraverso le bobine di generazione. Un materiale disponibile commercialmente denominato "mu-metal" è particolarmente buona come materiale di schermatura magnetica e un pezzo a forma di segno “più” viene utilizzato nella Ecklin-Brown generatore.
John Ecklin Generatore a Schermatura Magnetica.
John W. Ecklin è stato concesso brevetto Numero US 3,879,622 il 29 marzo 1974. Il brevetto è per un magnete/elettrico generatore motore che eroga una potenza superiore a quella di ingresso necessario per eseguirlo. Ci sono due tipi di funzionamento. L'illustrazione principale per il primo è:

Qui, l'(intelligente) idea è quella di utilizzare un piccolo motore a bassa potenza per ruotare una schermatura magnetica per mascherare la spinta di due magneti. Questo provoca un campo magnetico oscillante che viene utilizzato per ruotare un disco generatore.
Nel diagramma precedente, il motore a punto 'A' ruotare l'albero e le strisce di schermatura al punto ‘B ‘. Questi rettangolari mu-nastri di metallo formano un percorso molto conduttivo per le linee di forza magnetiche quando sono allineati con le estremità dei magneti e efficacemente spegnere la spinta del magnete nella zona di punto 'C'. Al punto 'C', la molla viaggiatore è tirato a sinistra quando la destra magnete è schermato e il magnete mano sinistra non è schermato. Quando l'albero motore ruota ulteriormente, il viaggiatore viene tirato a destra quando la sinistra magnete è schermato e il magnete mano destra non è schermato. Questa oscillazione è passata dal collegamento meccanico al punto 'D' dove viene utilizzato per ruotare un albero utilizzato per alimentare un generatore.
Come lo sforzo necessario per ruotare lo scudo magnetico è relativamente basso, si afferma che l'uscita supera l'ingresso e quindi può essere utilizzato per alimentare il motore che ruota la schermatura magnetica.
Il secondo metodo per sfruttare l'idea è mostrato nel brevetto come:

Qui, la stessa idea di schermatura è utilizzata per produrre un movimento alternativo che viene poi convertito in due moti rotatori per pilotare due generatori. La coppia di 'A' magneti sono posti in un contenitore e premuto verso l'altra da due molle. Quando le molle sono completamente estesi, sono solo chiari dello scudo magnetico 'B'. Quando un piccolo motore elettrico (non mostrato in figura) si sposta lo scudo magnetico di mezzo, i due magneti sono fortemente respinti tra loro come i loro poli Nord sono ravvicinati. Questo comprime le molle e attraverso i collegamenti a 'C' fanno girare due alberi per generare potenza.
Una modifica di questa idea è il Ecklin-Brown Generatore. In questa disposizione, la disposizione mobile schermatura magnetica fornisce un'uscita elettrica diretta piuttosto che un movimento meccanico:

Qui, il motore stesso e ruotando disposizione scudo magnetico viene utilizzato, ma le linee di forza magnetiche sono bloccati da fluisce attraverso un centrale I-pezzo. Questo I-pezzo è fatto di pezzi di ferro laminati e ha una bobina pickup o bobine avvolte intorno ad esso.
Il dispositivo funziona come segue:

Nella posizione mostrata a sinistra, le linee magnetiche di forza verso il basso del flusso attraverso le bobine di prelievo. Quando l'albero motore ha ruotato di altri 90 gradi, la situazione a destra si verifica e là, le linee magnetiche di flusso della forza verso l'alto attraverso le bobine pick-up. Questo è indicato dalle frecce blu nel diagramma. Questa inversione del flusso magnetico avviene quattro volte per ogni rotazione dell'albero motore.
Mentre il design Ecklin-Brown si presuppone che un
motore elettrico è utilizzato per ruotare lo schermo di mu-metal, ci non sembra
essere alcuna ragione perché la rotazione non dovrebbe essere fatto con un
motore a magnete permanente.
Forme toroidali sono chiaramente importanti in
molti dispositivi che tirano in ulteriore energia dall'ambiente. Tuttavia, il
generatore di Ecklin-Brown sembra un po' complicato per costruzione domestica,
il principio può essere utilizzato con uno stile molto più semplice di
costruzione dove i nuclei delle bobine di uscita sono barre diritte di
materiale adatto come ferro 'soft' o forse ancore la muratura più prontamente
disponibile:

Se usare le ancore di muratura, assicuratevi di
tagliare l'estremità conica come altera l'effetto magnetico in modo non
desiderato. Usando un seghetto a mano e una morsa, tagliando l'estremità è una
cosa molto facile da fare e che consente una bobina elicoidale ordinaria essere
ferita direttamente sull'albero o su una bobina semplice che scorre
sull'albero. Con qualsiasi tale bobina, la tensione prodotta aumenta come il
numero di girate in bobina aumenti. La massima corrente assorbita dipende lo
spessore del filo come il più spesso il filo, il maggiore di corrente che può
trasportare senza surriscaldamento.

Possiamo usare un magnete ordinario o un insieme
di magneti a ciascuna estremità del nucleo dritto a causa di un forte campo
magnetico di fluire attraverso il nucleo della nostra bobina. Come il motore
gira le due braccia di screening passano alternativamente tra il magnete ad una
estremità del nucleo e quindi il magnete a altra estremità del nucleo, creando
un campo magnetico oscillante, passando attraverso la bobina.
Il disegno Mostra solo una bobina di uscita, ma ci
potrebbero essere due bobine:

O ci potrebbero essere quattro bobine:
Le bobine possono essere collegate in parallelo
per aumentare la corrente in uscita, o può essere collegati in serie (in una
configurazione di catena) per aumentare la tensione di uscita. Mentre i disegni
mostrano gli scudi collegati direttamente all'albero motore motore (una breve
lunghezza del manicotto di plastica da un pezzo di filo sarebbe probabilmente
essere usata per aiutare con l'allineamento dell'albero motore e la schermatura
dell'asse) non non c'è nessuna ragione perché la schermatura non dovrebbe
essere un asse separato montato nei cuscinetti e guidato da una puleggia e
disposizione della rotella.
Con un asse separato schermante, permette un asse lungo, rigido per essere utilizzato e che permette ci siano magneti e bobine supplementari. Il risultato potrebbe essere simile a questa:
Howard Johnson Motore a Magneti Permanenti.
Tornando ai motori a magneti permanenti stessi, uno dei nomi più importanti in questo campo è Howard Johnson. Howard costruito, ha dimostrato ed ha guadagnato brevetto US 4,151,431 il 24 aprile 1979, da un ufficio brevetti molto scettico per il suo progetto di un motore a magneti permanenti. Ha usato potente ma molto costoso cobalto/samario magneti per aumentare la potenza e dimostrato i principi del motore per l'edizione Primavera 1980 di Scienza e la rivista Meccanica. La sua configurazione del motore è il seguente:
Il punto che fa è che il flusso magnetico del suo motore è sempre sbilanciato, producendo così una spinta continua rotazione. I magneti del rotore sono uniti a coppie a gradini, collegati da un giogo non magnetico. I magneti dello statore sono collocati su un cilindro coperto da uno strato di mu-metallo . Mu-metal è molto altamente conduttivo per flusso magnetico (ed è costoso). Gli stati di brevetto che il magnete armatura è 3.125 "(79.4 mm) di lunghezza ed i magneti dello statore sono da 1" (25,4 mm) di larghezza, 0,25 "(6 mm) di profondità e 4" (100 mm) di lunghezza. Essa afferma inoltre che le coppie di magneti del rotore non sono impostate a 120 gradi l'una dall'altra, ma sono sfalsati leggermente per appianare le forze magnetiche sul rotore. Si precisa inoltre che lo spazio d'aria tra i magneti del rotore e lo statore sono un compromesso in quanto maggiore è la distanza, la fluidità del funzionamento ma minore è la potenza. Quindi, uno spazio viene scelta per dare la massima potenza a un livello accettabile di vibrazione.
Howard ritiene magneti permanenti ad essere superconduttori a temperatura ambiente. Presumibilmente, vede materiale magnetico ad avere indicazioni di spin di elettroni in direzioni casuali in modo che il loro campo magnetico netto è vicino allo zero fino a quando gli spin elettronici sono allineati dal processo di magnetizzazione che crea quindi una netta complessiva campo magnetico permanente, sostenuto dal flusso elettrico superconduttore.
La disposizione magnete è mostrato qui, con gli inter-magnete lacune valutati dal disegno nel brevetto Howard:

Un articolo della rivista su questo può essere visto http://newebmasters.com/freeenergy/sm-pg48.html.
Il "Carousel" Magnete Permanente
Motore/Generatore.
Brevetto US 5,625,241 (riportata in appendice), presenta i dettagli specifici di un semplice generatore elettrico alimentato da magneti permanenti da solo. Questo generatore può anche essere utilizzato come un motore. La costruzione non è particolarmente complicato:

Esso utilizza una disposizione in cui sono associati magneti permanenti ogni seconda bobina attorno al rotore. Il funzionamento è autoalimentato e la disposizione magnete è chiaramente definito:

E la disposizione fisica del dispositivo non è particolarmente complicato:
Si tratta di un brevetto che vale la pena leggere e prendere in considerazione, soprattutto perché non è una presentazione complessa da parte degli autori, Harold Ewing, Russell Chapman e David Porter. Questo generatore apparentemente molto efficace sembra essere trascurato al momento attuale. Sembra chiaro che i motori a magneti permanenti sono un'opzione totalmente praticabile per il costruttore fai-da-te e sono capaci di potenze notevoli per lunghi periodi, tuttavia, va notato che i motori con magneti soli sono notoriamente di difficili operatività e mentre può essere fatto, i motori che utilizzano in movimento schermatura o pulsata schermatura elettrica sono molto più vitali per la prima volta costruttore - motori, come il motore o Flynn Charles Stephen Kundel motore.
Robert Tracy Motore a Magneti Permanenti.
Alcune persone hanno optato per motori a magneti permanenti in cui è schermato il campo al momento opportuno da un componente in movimento del motore. Robert Tracy è stato assegnato brevetto statunitense numero 3.703.653 il 21 novembre 1972 per un "motore alternativo con la conversione per mezzol del moto ". Suo dispositivo utilizza schermi magnetici posti tra coppie di magneti permanenti nel punto appropriato nella rotazione dell'albero motore:
Ben Teal Elettromagnete Motore.
I motori di questo tipo sono in grado di potenza considerevole. Il motore molto semplice, originariamente costruito da Ben Teal utilizzando il legno come materiale da costruzione principale, è stato assegnato numero di
brevetto 4,093,880 degli Stati Uniti nel mese di giugno 1978. Ha scoperto che, con le mani, non riusciva a smettere verso di rotazione dell'albero a dispetto di esso che tale disegno motore molto semplice:

Il funzionamento del motore è più semplice possibile con soli quattro interruttori in metallo elastico, spinto da una camma sull'albero del rotore. Ogni switch solo alimenta il suo elettromagnete quando deve tirare e si disconnette quando il tiro è completato. Il motore risultante è molto potente e molto semplice. Potenza addizionale può essere dovuto semplicemente impilare uno o più strati aggiuntivi sopra l'altro. Il diagramma mostra due strati impilati uno sopra l'altro. Solo una serie di quattro interruttori e una camma è necessaria indipendentemente dal numero di strati vengono utilizzati, come i solenoidi verticalmente sopra l'altro sono collegati tra loro in parallelo, come tirano contemporaneamente.
La potenza erogata dal motore Teal è un'indicazione della potenza potenziale di un motore a magneti permanenti che opera in modo abbastanza simile spostando schermi magnetici per ottenere un movimento alternativo. Posizionamento di un resistore e condensatore attraverso ciascun contatto di commutazione sia sopprime scintille e alimenta corrente alla batteria quando il contatto si apre, e questo si estende la durata della batteria notevolmente.
Il Jines Motore a Magneti
Permanenti.
James E. Jines e James W. Jines sono stati assegnati brevetto US 3469130 il 23 settembre 1969 "Modalità di Schermatura e Unshielding magneti permanenti e motori magnetici Utilizzando la stessa" e che si trova in appendice. Questo disegno motore a magnete utilizza selettiva schermatura dei magneti di azionamento per produrre una forza costante in una direzione. Essa ha anche una disposizione meccanica per regolare progressivamente la schermatura per regolare la potenza del motore.


Si tratta di un progetto molto interessante di motore magnetico, tanto più che non richiede materiali che non sono facilmente reperibili da molti fornitori. Essa ha anche il vantaggio di non richiedere alcun tipo di regolazione esatta o bilanciamento di forze magnetiche per farlo funzionare.
Stephen Kundel Motore a Magneti
Permanenti.
Design

Qui, il braccio giallo contrassegnato 38, rocce a destra e sinistra, spinto da un solenoide 74. Non vi è alcun motivo evidente questo movimento oscillante non può essere raggiunto da un collegamento meccanico connesso all'albero di uscita rotante 10. I tre bracci 20, 22 e 24, essendo imperniate ai loro punti superiori, vengono spinti in una posizione centrale dalle molle 34 e 35. I magneti 50, 51 e 52, sono mossi da queste armi, provocando una rotazione continua dell'albero motore di uscita 10. Il movimento di questi magneti evita la posizione in cui i magneti raggiungere un punto di equilibrio e serratura in un'unica posizione.
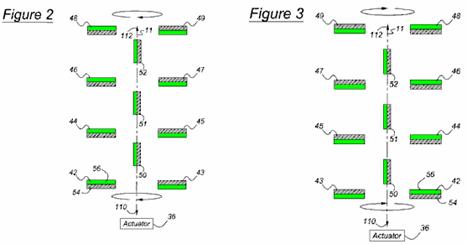
Le Figure 2 e 3 mostrano la posizione dei magneti, con la posizione di Figura 3 che mostra un punto nella rotazione dell'albero di uscita, che è di 180 gradi (mezzo giro) più avanti rispetto alla posizione mostrata in Figura 2
Alcuni altri accordi magnete più potenti che possono essere utilizzati con questo motivo sono mostrati nel brevetto piena in appendice.
Questo disegno non sembra interessare a molti costruttori nonostante il fatto che deve essere uno dei motori più semplici magnete per impostare e far funzionare. Il livello di potenza di uscita può essere grande come si desidera utilizzare come ulteriori strati di magneti possono essere aggiunti. Il funzionamento è molto semplice e può, forse, essere visti più facilmente se solo un braccio di leva è considerato. Il braccio di leva ha solo due posizioni di lavoro. In una posizione che agisce su una serie di magneti del rotore e nella seconda posizione agisce su un secondo gruppo di magneti del rotore. Quindi, vedremo ogni gruppo a turno. Se ci sono due magneti vicino l'un l'altro, uno fisso in posizione e l'altra libera di muoversi in questo modo:

I magneti hanno una forte attrazione per l'altro a causa i poli nord e sud, attirando ogni altro. Tuttavia, come i due poli sud si respingono, il movimento del magnete si avvicina non è direttamente lungo le frecce verdi mostrato ma inizialmente è nella direzione indicata dalla freccia rossa. Questa situazione continua con il magnete mobile si avvicina che ha fissato il magnete e l'attrazione tra loro sempre più forte per tutto il tempo. Ma la situazione cambia immediatamente il movimento raggiunge magnete è il punto più vicino al magnete fisso. Slancio inizia a portarlo passato, ma a quel punto la direzione di trazione tra i magneti inizia a contrastare il movimento in avanti del magnete mobile:

Se il magnete fisso rimane in quella posizione, poi il magnete mobile oscillare brevemente e venuto ad una fermata direttamente di fronte il magnete fisso come questo:

Le forze di attrazione tra i due magneti è ora interamente orizzontale e non non c'è nessuna forza sul magnete mobile per provocare lo spostamento. Questa è roba semplice, capito da chi ha esaminato a magneti permanenti per vedere quello che fanno. Stephen Kundel è ben consapevole di questo, e così egli si muove il magnete "fisso" rapidamente fuori strada prima di tirare il rovescio-direzione rallenta il magnete mobile. Egli si muove il magnete lateralmente e scivola uno altro in posizione come questo:

Il nuovo magnete è ora molto più vicino al magnete mobile e quindi ha una molto maggiore influenza su di esso. I poli del magnete nuovo partita i poli del magnete mobile che li induce a respingere molto fortemente, guidando il magnete mobile in avanti nella direzione in che si muoveva. Il magnete mobile si muove molto rapidamente e quindi ottiene fuori della gamma dei magneti fissi abbastanza rapidamente, a quel punto, i "fissi" magneti dello statore sono spostati indietro nella loro posizione originale dove agiscono allo stesso modo sul successivo magnete mobile collegato al rotore.
Questa operazione molto semplice richiede solo una piccola forza per spostare i magneti dello statore lateralmente tra loro due posizioni, mentre la forza tra i magneti dello statore e i magneti del rotore può essere elevata, producendo una notevole potenza rotazionale all'asse su cui sono attaccati i dischi rotore.
L'efficienza del sistema è ulteriormente potenziato perché quando i magneti dello statore sono in prima posizione indicata, il secondo magnete "fisso" non è inattivo, ma, invece, agisce sul magnete del prossimo disco di rotore:

Per questo, i magneti attaccati al disco rotore 2 devono essere posizionato in modo che i poli sono il contrario di quelle legate a disco rotore 1. Stephen utilizza un altoparlante ad per oscillare la barra orizzontale su cui sono montati i magneti dello statore, all'indietro e in avanti come un altoparlante ha quel meccanismo già costruito in esso. Motore a magnete permanente di Don Kelly utilizza anche questa molto semplice idea di movimento fuori strada i magneti dello statore al momento opportuno.
Charles “Joe” Flynn Motore a Magneti
Permanenti.
Brevetto US 5,455,474 del 3 ottobre 1995 e mostrato per intero in appendice, fornisce i dettagli di questo progetto interessante. Si dice: "La presente invenzione riguarda un metodo per produrre energia utile con magneti come motore e rappresenta un miglioramento importante sopra costruzioni note ed è uno che è più semplice da costruire, può essere fatto per essere auto partenza, è facile regolare , ed è meno probabile di uscire di regolazione. La costruzione attuale è relativamente facile da controllare, è relativamente stabile e produce una quantità di energia di uscita sorprendente considerando la fonte di energia di guida che viene utilizzato. La costruzione attuale fa uso di magneti permanenti come fonte di energia di guida ma mostra un nuovo mezzo per controllare l'interazione magnetica o accoppiamento tra i membri magnete e in un modo che è relativamente robusto, produce una notevole quantità di energia potenza e coppia, e in un dispositivo in grado di essere utilizzato per generare notevoli quantità di energia".
Il brevetto descrive più di un motore. Il primo è come questo, quando visto dal lato:

Una vista esplosa, mostra le diverse parti in modo chiaro:

Questa costruzione è relativamente semplice ma l'operazione è potente. L'alimentazione è fornita da tre magneti, ombreggiate mostrate in blu e giallo. Il magnete inferiore ha la forma di un disco con i poli disposti sui grandi, circolari, facce piane. Questo è il magnete-statore che non si muove. È posizionato sopra un disco di materiale non magnetico (in grigio) e che ha due magneti incorporati in esso. Questo disco è il rotore ed è fissato all'albero centrale verticale.
Normalmente, il rotore non ruota, ma tra i due dischi vi è un anello di sette bobine che vengono utilizzati per modificare i campi magnetici e produrre la rotazione potente. L'accensione di queste bobine è molto semplice ed è disposto da un fascio luminoso di luce ultravioletti da uno dei Light-Emitting Diodes attraverso una fessura in un disco otticotemporizzazione attaccato all'albero rotante. I LED e le foto-transistor sono allineati con i centri delle sette bobine. La posizione e la larghezza della fessura che controlla fototransistor viene acceso e per quanto tempo rimane acceso. Si tratta di un accordo molto ordinato e compatto. La parte veramente interessante del disegno è come le bobine modificare i campi magnetici per produrre la potenza di uscita del dispositivo. L'orientamento dei poli magnetici possono essere scambiati, a condizione che ciò avvenga per tutti e tre magneti.

Qui è illustrata la situazione in cui uno dei magneti rotore ha ruotato dove supera una delle bobine, che non è ancora acceso. Il polo sud del magnete del rotore è attratto verso il polo nord che è l'intera faccia superiore del magnete statore come indicato dalle tre frecce. Se viene applicata una tensione alla bobina, allora questo accoppiamento magnetico viene perturbato e alterato. Se qualsiasi coppia viene sviluppata come risultato della bobina viene alimentata, allora sarà sviluppato per entrambi i lati della bobina eccitata. Se la bobina non è acceso, allora non ci sarà piena attrazione tra i magneti e nessuna forza di rotazione sarà prodotto. Noterete che ci sono due magneti rotanti (un numero pari) e sette bobine (un numero dispari), in modo che quando uno dei magneti del rotore è superiore a una bobina, poi l'altro non lo è. Questo scaglionamento delle due posizioni è essenziale per generare liscia, coppia continua rotazione e di auto-avviamento senza necessità di ruotare manualmente l'albero.

Il diagramma mostra un pezzo da entrambi i lati del disco rotore, per spiegare il funzionamento delle bobine. A sinistra, magnete 56 bobina sovrapposizioni 32 e bobina 34. Bobina 32 è alimentato e questo interrompe il collegamento magnetico sul lato sinistro del magnete 56. Ma, la bobina 34 non è alimentata, quindi l'attrazione tra il magnete 56 ed il disco magnetico alle bobine rimane. Anche se questa attrazione è ad un angolo verso il basso, crea una spinta sul rotore, guidarlo verso destra, come indicato dalla freccia rossa.
Mentre ciò accade, la situazione intorno all'altro lato del disco rotore, è mostrato sulla destra. Qui, magnete 54 è al di sopra della bobina 36 e che la bobina non è alimentata, quindi non c'è movimento in entrambe le direzioni - solo una spinta verso il basso sul magnete del rotore, verso il magnete statore sotto di essa. La bobina 38 è adiacente anche non alimentato e pertanto non ha effetto sulla rotazione. Questo metodo di funzionamento è molto vicina a quella del disegno motore di Robert Adams descritto nel prossimo capitolo. È importante comprendere che questo metodo di funzionamento è niente come quello delle pulsers John Bedini sia causato la rotazione di un disco dell'impulso elettrico applicato ad una bobina creando una spinta repulsione per un magnete del rotore. Invece, qui, la bobina si comporta come uno schermo magnetico, essendo dotato della potenza minima possibile per fare il suo lavoro. La bobina è, in effetti, uno scudo che non ha parti in movimento, e così è un meccanismo molto intelligente per superare la tendenza per i magneti del rotore per agganciare i magneti dello statore e antirotazione.
In qualsiasi momento, sei dei sette bobine in questo disegno sono inattivi, in effetti, una sola bobina viene alimentata. Questa non è un
maggiore consumo di corrente. È importante comprendere che la potenza di questo motore è fornita dai magneti permanenti tirando verso l'altra. Ciascuno dei due magneti applica una trazione orizzontale sul rotore ogni settimo di giro, cioè ogni 51,1 gradi nella rotazione. Poiché le bobine sono in numero dispari, il rotore ottiene una forza magnetica ogni 25,5 gradi nella rotazione, prima da un magnete del rotore e quindi dal magnete del rotore altro.
Ne consegue quindi che la potenza del motore può essere aumentata aggiungendo più magneti. Il primo passo in questa ricerca di potenza aggiuntiva è aggiungere un secondo magnete disco e bobine sull'altro lato del rotore, in modo che vi sia una trazione secondo sul magnete. Questo ha il vantaggio aggiuntivo che equilibra tirare verso il basso del magnete primo disco con una trazione verso l'alto, dando una spinta maggiore ed equilibrata orizzontale come mostrato qui:

La bobina di commutazione con lo strato supplementare di bobine è mostrato di seguito:

Questo produce una spinta maggiore orizzontale. Mentre questo disegno va per prestazioni ottimali, suggerisco una forma molto più semplice di costruzione con un anello di standard di magneti al neodimio circolari potrebbe essere usato al posto di un magnete grande disco, e ordinari bobine circolari sovrapposti dei magneti circolari, e questo permette di rotori di grande diametro per essere costruito, il diametro maggiore dando maggiore potenza all'albero di uscita:

Per aumentare la potenza dell'albero di uscita ulteriore nuovo, gruppi aggiuntivi di magneti e le bobine possono essere aggiunti come illustrato di seguito:
Va ricordato che la sezione di temporizzazione mostrato sopra potrebbe essere sostituito da un circuito NE555 che genera un flusso costante di On / Off impulsi. Quando tali impulsi vengono alimentati alle bobine, il motore ruota, asservimento alla stessa frequenza degli impulsi. Questo dà un immediato controllo di velocità del motore e di evitare la necessità per il posizionamento preciso del disco scanalato che consente di LED colpisca direttamente ai fototransistori nell'istante appropriato. Se tale approccio è presa, quindi la sezione di temporizzazione sopra indicato sarebbe omesso.
Il circuito che Charles specifica per alimentare le bobine di bloccare i campi magnetici dei magneti permanenti utilizza MOSFET a canale N ed è molto semplice. Ecco il suo circuito per pilotare una delle bobine:
Solo cinque componenti sono usati. La corrente attraverso la bobina è controllato da un transistor. In questo caso si tratta di un Field-Effect Transistor solito chiamato "FET". Il tipo più comune di FET viene utilizzato, vale a dire una "N-channel" FET che è l'equivalente di un transistore NPN come descritto nel capitolo 12. Un FET di questo tipo è spento quando la tensione su di essa la "gate" (contrassegnata "g" nel diagramma) è 2,5 volt o inferiore. Si è acceso quando la tensione sul suo gate è 4,5 volt o più.
In questo circuito si desidera che il FET si accende quando il disco di sincronizzazione del
motore è in posizione corretta, e spento in tutti gli altri. Questo è disposta facendo accendere la luce da un diodo a emissione luminosa o "LED" attraverso un foro nel disco di fase che ruota con l'albero del motore. Quando il foro è opposto il LED per la bobina che deve essere alimentato, luce brilla attraverso il foro e su un dispositivo fotosensibile, Charles ha scelto di utilizzare un transistor fotosensibile, ma una resistenza dipendente dalla luce quale un ORP12 potrebbe essere utilizzato. Quando la luce splende sul dispositivo "Opto1" nello schema elettrico, la sua resistenza si riduce drasticamente, aumentando la tensione sul gate del FET e di accenderlo. Quando il foro del disco temporizzazione si sposta oltre il LED, la luce viene interrotta e la tensione di gate FET scende, la commutazione off FET. Questa disposizione fa sì che la bobina del motore per essere accesa e spenta al momento giusto per dare una forte rotazione dell'albero motore. Nel circuito, la resistenza "R1" è lì per assicurarsi che la corrente che fluisce attraverso il LED non è eccessiva. Il "R2" resistenza ha un valore basso rispetto alla resistenza di "Opto1" quando nessuna luce cade su di esso, e questo vale la tensione di gate del FET ad un valore basso, facendo in modo che il FET è completamente spento.
Come si può vedere, si tratta essenzialmente di un circuito molto semplice. Tuttavia, come uno di questi circuiti è usato per ogni bobina (o ciascuna coppia di bobine se vi è un numero pari di bobine in questa fetta del motore), il circuito nel brevetto sembra piuttosto complicato. In realtà è molto semplice. La resistenza "R1" è utilizzato per limitare il flusso di corrente attraverso tutti i LED utilizzati e non solo un LED. Si può, naturalmente, utilizzare una resistenza per ogni LED, se si voleva. Il circuito per l'alimentazione di due bobine (e non mostra il disco di fase) si presenta così:

La sezione all'interno della linea tratteggiata verde essendo il circuito identico per la seconda bobina. Questo oltre al circuito è fatto per ciascuna bobina, a questo punto, il motore è pronto a funzionare. Se, come sarebbe normale, diversi strati di magneti vengono utilizzati, allora le bobine posizionate sopra le altre possono essere collegati in:

Collegamento diverse bobine "in serie" (in una catena) come questo, riduce il numero di componenti elettronici necessari e si fa in modo che gli impulsi di ciascuna di queste bobine è esattamente nello stesso istante. In alternativa, è possibile collegare queste bobine attraverso l'altro "in parallelo", la scelta è generalmente dettata dalla resistenza delle bobine. Il disegno di brevetto sopra indicato sembra indicare che vi è una notevole differenza tra il LED e dispositivi ottici. Questo probabilmente non è il caso come molte persone scegliere di mantenere la distanza tra il LED e la luce-dipendente dispositivo più piccolo possibile, montandoli in modo che siano appena a di disco di fase su ogni lato di essa.
In questo brevetto, Charles Flynn osserva che questo motore a magneti possono essere utilizzati per qualsiasi scopo dove è richiesto un motore o azionamento del motore e in cui la quantità di energia disponibile o necessaria per produrre la forza di azionamento può variare poco a zero. Charles ha prodotto motori di questo tipo che sono in grado di ruotare a velocità molto alta - 20.000 rpm e coppia considerevole. Minori costi possono anche essere prodotte, e il motore può essere fatto per essere auto-avviamento. A causa della bassa potenza necessaria per il funzionamento del dispositivo, Charles è stato in grado di azionare il motore con solo una volt nove, già disponibili batteria a secco.
Una domanda che sembra più appropriata per questo progetto del motore è il riscaldatore Frenette mostrato nel Capitolo 14. Utilizzando questo motore per guidare i dischi all'interno del tamburo riscaldatore produrrebbe un riscaldatore che sembra essere guidata da soli nove volt. Tuttavia, mentre questo è l'aspetto, la realtà è che la potenza di questo motore deriva dai magneti permanenti e non dalla batteria. La corrente della batteria viene utilizzata solo per evitare la trazione all'indietro dei magneti e non viene utilizzato per azionare il motore.
Mentre l'utilizzo di un disco di fase è una disposizione molto soddisfacente, è anche possibile utilizzare circuiti elettronici invece del disco di fase meccanica, i dispositivi opto ei LED. Ciò è necessario qui è un dispositivo che produce una serie di impulsi di tensione che possono essere utilizzati per guidare la tensione di gate di ciascun FET da sotto 2,5 volt per oltre 4,5 volt. Sembra che il famoso chip di timer 555 sarebbe adatta a questo compito e sarebbe certamente uscito nove volt. Tuttavia, abbiamo più di una serie di bobine che devono essere eseguiti. Per esempio, se abbiamo detto, quattro serie di bobine per guidare dall'alimentazione quattro transistor FET diversi uno dopo l'altro, si potrebbe usare un chip "Dividere per otto ", come il chip 4022. Questo chip può essere impostato per dividere per qualsiasi numero 2-8. Tutto ciò che è necessario per selezionare il numero da dividere per, è una connessione tra due dei pin del chip.
La tensione di uscita sui pin contrassegnato "1", "2", "3" e "4" va alto uno dopo l'altro, come mostrato nel diagramma sopra. Così, ciascuno di questi piedini di uscita sarebbe collegato ai gate FET in questo ordine e il FET otterrebbe attivati nello stesso ordine.
Con il chip 4022, le connessioni per il tasso di divisione sono i seguenti:
Per 'Dividere per 7' operazione, collegare il pin 10 al pin 15
Per 'Dividere per 6' operazione, collegare il pin 5 al pin 15
Per 'Dividere per 5' operazione, collegare il pin 4 al pin 15
Per 'Dividere per 4' operazione, collegare il pin 11 al pin 15
Per 'Dividere per 3' operazione, collegare il pin 7 al pin 15
Per 'Dividere per 2' operazione, collegare il pin 3 al pin 15
Quando si utilizza un circuito come questo, la frequenza degli impulsi dal chip 555 è impostato ad un valore molto basso, come mezzo secondo, in modo che l'albero motore può iniziare. Una volta che si muove, la frequenza degli impulsi è aumentata gradualmente per accelerare il motore fino. Un vantaggio di questo metodo è che permette il controllo della velocità, e se il motore è stato utilizzato per alimentare un riscaldatore Frenette, allora il controllo della velocità agisce anche come un controllo della temperatura per il riscaldamento.
Un possibile 555 chip circuito potrebbe essere:
Ciò consente di controllare la velocità e quando la velocità è stata raggiunta, la durata dell'impulso può essere aggiustata per ottenere l'estrazione corrente minima di mantenere tale velocità. Ci sono, naturalmente, molti altri circuiti idonei che possono essere utilizzati al posto di questo e nel capitolo 12 vi compilare su alcune di esse oltre a spiegare come funzionano i circuiti e come costruirli.
Se succede che è difficile trovare le magneti circolari con i poli sulle facce opposte, allora suggerisco che dovrebbe essere possibile utilizzare standard magneti rettangolari tutta bobine e rettangolare come illustrato di seguito:
E mentre questa disposizione non è così efficiente come magneticamente un magnete circolare, ha comunque il vantaggio di consentire la realizzazione di un rotore di qualsiasi dimensione scelta. Idealmente, a differenza dello statore mostrato sopra, ci dovrebbe essere un numero dispari di magneti, o, altrimenti, un numero dispari di bobine. In alternativa, il rotore potrebbe avere un numero dispari di magneti in modo da consentire avvio automatico. Tuttavia, va notato che, se il motore deve essere azionato da un sistema elettronico di impulsi, allora è molto più semplice per avere un numero pari di magneti dello statore e avviare il motore in movimento a mano. Questo perché con un numero dispari di magneti dello statore, i sensori ottici non sono esattamente di fronte all'altra e quindi non vengono attivati assieme. Con un numero pari di magneti dello statore, le bobine che sono 180 gradi possono essere collegati insieme come fuoco esattamente nello stesso momento. Con il disco scanalato temporizzazione ottico, gli slot sono esattamente di fronte all'altra e corrispondere alla larghezza dei magneti del rotore, ma le bobine (quasi) opposti reciprocamente non sono alimentati e fuori esattamente allo stesso tempo, anche se i loro archi alimentati tendono a sovrapporsi per parte del loro funzionamento. Questo potrebbe essere soddisfatto elettronicamente utilizzando un ritardo monostabile per la bobina sul lato opposto del disco.
L'obiettivo di ciascuna bobina è solo, e appena, annullare il campo magnetico del magnete permanente sotto. Il campo magnetico prodotto dalla bobina dipende dalla corrente che fluisce nella bobina, il numero di spire della bobina e l'area della bobina. La corrente che scorre dipende dal diametro del filo e la tensione applicata ad esso. Probabilmente è necessario montare un solo magnete sullo statore e sperimentare con la bobina fino a quando l'unità corrente e la bobina consentono al rotore di ruotare liberamente. Qualunque sia il risultato bobina, dovrebbe essere ok per tutti i magneti anche se sono suscettibili di variare un po ' in intensità.
Steorn di Dispositivi Magnetici.
La società irlandese Steorn hanno prodotto un sistema che è quasi identico al Flynn Charles motore a magneti appena descritto. Lo chiamano il loro dispositivo "Orbo" e il suo funzionamento è praticamente la stessa. L'anticipo fatta da Steorn è che hanno messo a punto un sistema di mascheramento magnetico molto intelligente utilizzando toroidi in ferrite avvolto con una bobina di filo di rame. Questo è un metodo di commutazione liscia attrazione magnetica e spegnimento. Quando la bobina una corrente sufficiente che genera un campo magnetico circolare a spirale attorno al toroide e non andare fuori del toroide. Questo campo non ha un attrazione per i magneti fuori. Non fa differenza se la direzione del flusso di corrente attraverso la bobina viene invertito come il campo magnetico risultante gira dietro l'toroide nella direzione opposta ed esegue esattamente le stesse blocco magnetiche della ferrite dell'anello che forma il toroide. Se nessuna corrente, allora il filo di rame non bloccare l'influenza dell'anello ferrite ed i magneti permanenti del rotore sono fortemente attratto, causando il rotore a girare.
Sul loro sito web www.steorn.com, Steorn illustrare il loro progetto come questo:
In questa implementazione, otto anelli di ferrite sono montati sullo statore in quattro sedi 90 gradi. Questi sono avvolti con bobine di filo di rame, che può essere alimentato da una batteria, tramite un meccanismo di temporizzazione. Il rotore ha incorporato in esso, otto paia di magneti permanenti, anche distanziati 90 gradi.
Esattamente nello stesso modo come il motore Adams descritto nel capitolo 2, la corrente attraverso le bobine è impostato al livello minimo che consente al rotore di ruotare liberamente. Il meccanismo di temporizzazione viene attivata e il motore e il rotore fatta girare. I magneti del rotore sono fortemente attratti dai loro corrispondenti anelli di ferrite montati sui messaggi statore e questo accelera il rotore.
Se nessuna corrente passa attraverso le bobine, il rotore oscilla avanti e indietro per un breve periodo prima di fermarsi con i magneti più vicino agli anelli di ferrite possibile. Per evitare tale inconveniente, i sensi circuito di temporizzazione quando i magneti raggiungere gli anelli di ferrite, e passa quella minima corrente attraverso le bobine, intrappolando gli anelli all'interno di un campo magnetico che non ha alcun effetto sui magneti del rotore. La quantità di moto del rotore induce a ruotare sul passato gli anelli di statore ad una posizione in cui i magneti sono più vicini agli anelli che sono prossimi a quelli che hanno appena superato, a questo punto, la corrente viene interrotta e l'magnetico attrazione per i rendimenti anelli di ferrite. Questo è identico a una modalità di funzionamento del Motore Adams.
Il passo successivo è identica a quella del motore Adams, cioè, di aggiungere alcuni bobine di prelievo per convertire parte dell'energia magnetico rotante in energia elettrica, sia per ricaricare la batteria di guida o per alimentare altro o entrambi.
Steorn disposizione per fare questo è quello di aggiungere un disco aggiuntivo, con magneti permanenti, al rotore e bobine di filo di posizionamento di fronte quei magneti come è normale per un generatore. Steorn scegliere di visualizzare l'energia risultante di carica la batteria di nuovo:
Presentazioni video su questo stile di motore/generatore si trovano in:
http://www.youtube.com/watch?v=AXamGLyRkt8&NR=1
http://www.youtube.com/watch?v=rg3rLqYMzN4&feature=related e
http://jnaudin.free.fr/steorn/indexen.htm
Il 28 ottobre 2015, Steorn ha annunciato il loro ultimo prodotto chiamato Power Cube che assomiglia a questo:

Questa casella contiene una batteria agli ioni di litio, un circuito di ricarica e una porta di output USB-C. Questo è l'ultima versione della famiglia di porte USB ed è in grado di fornire 2,1 a 5 volt, che è in grado di ricaricare un tablet computer o un telefono cellulare. Se la batteria è Scarica, il circuito di ricarica interno può ricaricare la batteria interna due volte al giorno. Il prezzo di vendita è incredibilmente elevato a €1.200 e che rischia di incoraggiare le persone a offrire le prestazioni equivalenti ad un prezzo molto più basso, che suppongo che deve essere visto come una cosa buona.
Tendiamo a pensare a questo stile di motore alimentato a magnete come essendo a bassa potenza. Questo è probabilmente il motivo perché spesso le implementazioni di prova-di-principio di dimostrazione sono piccoli dispositivi. Questi motori possono essere molto potenti e quello mostrato qui, progettato e costruito dal signor Sung della Cina ha una potenza di 20 kW o venti-sette cavalli:

E un altro motivo che ha un diametro maggiore e circa magneti 144 ha una potenza di 225 cavalli riportato:
Noterete che ogni anello di magneti è posizionato più intorno al bordo del cilindro fornire impulsi da 64 potenti magneti ogni 22,5 gradi di rotazione, per cui non c'è da meravigliarsi che il motore ha un notevole potere dell'albero. Alcune delle bobine può essere commutato per raccogliere energia, se le condizioni di lavoro non ha bisogno della piena potenza di uscita albero, per la carica della batteria di alimentazione. Il cilindro interno rotante ha magneti permanenti montati su di esso.
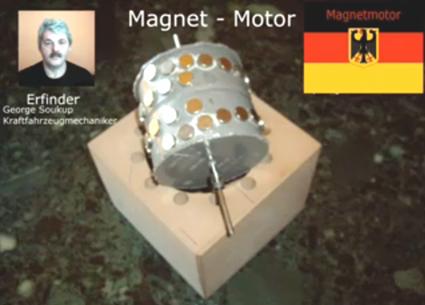
George Soukup
Motore a Magneti Permanenti
Ci deve essere utilizzato un video sul web, che mostra un motore a magneti costruito sullo stile "V" di posizionamento del magnete, che ha due serie di magneti permanenti distribuiti in questo modo:
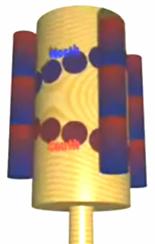

Questo stile di disposizione magneti (magneti Nord mostrato in blu e in rosso del Sud) ha un punto di chiusura in cui il passaggio da interdistanze a spaziatura stretta si verifica e questo fa sì che la rotazione di fermarsi lì.
L'implementazione mostrato in questo video ha i magneti V distanziati un po 'più ampiamente a parte come illustrato di seguito:
La conicità è molto meno pronunciata con un'intercapedine interna circa quattro volte maggiore del gap all'anello esterno. Risulta inoltre che il magnete interno ha uno spazio maggiore intorno al tamburo che il restante anello di magneti.
La custodia è molto semplice, cercando, con un anello a spaziatura uniforme di dodici fori di prendere magneti lunghi con alternanza di zone del Nord e del Sud magnetizzati lungo la loro lunghezza. Noterete dalle fotografie, che George ha cavità a prendere fino a dodici pile di magneti dello statore, anche se usa solo ogni cinque di loro per le sue dimostrazioni.

L'alloggiamento ha un notevole spazio per il tamburo e magneti. Il cuscinetto dell'albero posteriore è sufficiente impostare sul retro dell'alloggiamento:

La parte anteriore ha due fogli di acrilico, uno per contenere i magneti inserto in atto e uno per fornire il supporto cuscinetto anteriore dell'albero a:

Poiché non vi è alcun commento con il video è un po 'difficile da raccogliere tutti i dettagli, ma sembra che i magneti di posizionamento dello statore permette al motore di superare il punto di normale incollaggio del tipico motore V-accordo. Il video mostra varie modalità tra cui la non-simmetrica raggruppamento mostrato qui dove quattro o cinque magneti consecutivi sono utilizzati e gli slot rimanenti lasciati vuoti:

Dietmar Hohl
Motore a Magneti Permanent
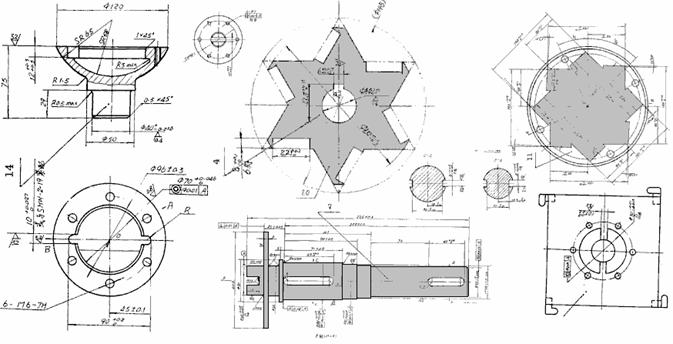
Se volete fare un semplice motore di questo tipo, quindi le informazioni fornite da Dietmar Hohl, passato a me da Jes Ascanio di Danimarca, vi mostra come. Egli utilizza 20 mm di diametro magneti al neodimio tondi spessore 10 mm, impilati a coppie nello statore di questo disposizione:
Questo mostra una disposizione magnetica cancello costruito su un pezzo di Medio-Density Fibreboard 30 mm di spessore. I fori in esso sono 20,1 millimetri di diametro e posizionati in modo da prendere due dei magneti 10 mm di spessore accatastati insieme. I fori sono realizzati con un angolo di 63 gradi a orizzontali o 27 rispetto alla verticale, in qualunque modo si preferisce pensare ad esso. Su un lato della tavola, i magneti sono inseriti i poli Nord rivolta verso l'alto, mentre sull'altro lato della scheda, i magneti sono inseriti con i loro poli sud rivolto verso l'alto. Dietmar mostra sei fori per prendere i bulloni o viti per fissare il pezzo di MDF ad una tavola più grande o una tabella. Quelli non costituiscono alcuna parte del sistema magnetico e può essere omesso. Un video di una versione di esso in azione sono disponibili all'indirizzo http://www.free-energy-info.tuks.nl/Vtrack.mpg.
Il cancello funziona provocando una pila di dieci dei magneti a rotolare lungo la pista a forma di V e passare agevolmente attraverso la giunzione con la serie successiva di Vposizionati magneti. Ci possono essere molti di questi V-set come si desidera e lo stack magnete sarà ancora continuare a tirare. Questo è uno dei pochi modelli di gate magnetici che si adatta a tamburo funzionamento come rotore di un motore.
I magneti sono posizionati ad un angolo al fine di utilizzare i campi magnetici al bordo dei magneti. Sono impilati a coppie in modo da aumentare la loro potenza. La potenza del motore dipende dalla forza dei magneti, come chiudere gli stack statore a magneti sono le tracce VF-magneti e il numero di pile di magneti dello statore. Se si decide di costruire uno di questi motori, allora si suggerisce che si fanno le cose più facili per voi stessi mantenendo la bassa curvatura, con tre o quattro del vs. Con dimensioni Dietmar, un 2-V tamburo sarebbe 216,5 millimetri (8,5 ") di diametro, un 3-V tamburo avrebbe un 325 mm (12,8") di diametro e una 4-V tamburo del diametro di 433 mm (17 ") e quelle dimensioni comprendono i 30 mm (1 3/16 ") striscia che contiene i magneti, in modo che i diametri tamburo interni sono 30 mm in meno in ciascun caso.
Quando si effettua il tamburo motore, è possibile utilizzare un materiale flessibile per tenere i magneti. Questo permette la striscia da distesi mentre la foratura, e poi applicata all'esterno di un tamburo rigido con un diametro di 60 mm inferiori a quelli sopra menzionati. Jes Acanius della Danimarca mostra come una maschera può essere fatto per rendere più facile la foratura:
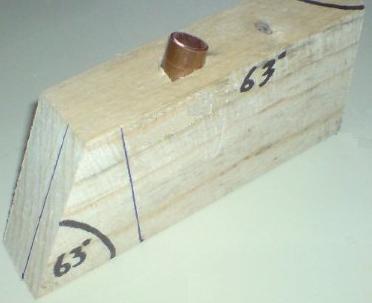
Questo ha una lunghezza di tubo di rame inserito il corretto angolo, in modo da dirigere la punta con l'angolo esatto richiesto. Questo motore è stato replicato con successo da Jes Ascanio della Danimarca che ha usato 10 magneti mm che erano a portata di mano, e di nuovo con magneti quadrati che sono stati spinti in fori rotondi e nemmeno angolato in questo proof-of-concept di attuazione che hanno avuto solo un'ora per costruire utilizzando materiale di scarto a portata di mano, e che ha fatto il lavoro:

Con un design Dietmar utilizzando angoli coppie di magneti, il numero di magneti necessari è piuttosto elevata. Per una V monofase, ci sono 58 magneti. Per un 2-V versione, 106 magneti. Per un 3-V versione, magneti 154 e per un 4-V versione, 202 magneti se vi è una sola pila di magneti dello statore, così dieci magneti supplementari devono essere aggiunti al conteggio per ogni ulteriore dieci magnete pila di magneti dello statore . La potenza del motore è destinato ad aumentare il diametro aumenta il braccio di leva che il magnete deve ruotare il tamburo, aumenta - doppio del diametro di (quasi) il doppio della potenza.
Semplici Motori a Magneti Permanenti
È molto difficile usare i magneti permanenti per fare un motore alimentato da soli. Il design Dietmar Hohl mostrato sopra è uno dei pochi che può facilmente essere fatti e testati in casa. Il problema è che quasi tutti i magneti hanno un campo magnetico simmetrico, mentre ciò che è necessario per un magnete motore alimentato è un campo magnetico asimmetrico. Di conseguenza, i magneti devono essere combinati in modo che falsano la loro forma normale campo. Si noterà che nel motore Hohl, i magneti sono angolate di azionamento e che è una caratteristica importante di utilizzare magneti in motori.
Le scuole attualmente insegnano che il campo che circonda un magnete a barra è come questo:
Questo si deduce disperdendo limatura di ferro su un foglio di carta tenuto vicino al magnete. Purtroppo, questo non è una deduzione corretta come la limatura di ferro distorcere il campo magnetico con la loro presenza, diventando ogniuno un magnete in miniatura nel suo pieno diritto. Misura più attenta mostra che il campo effettivamente prodotto da un magnete bar è simile a questo:
Ci sono molte linee di forza, anche se questi diagrammi
mostrano solo due di loro. In realtà, le
linee di forza agli angoli a ventaglio in tre dimensioni, con linee curve, che
scorre circolare sopra la cima del magnete, linee circolari sotto la faccia
inferiore del magnete. Queste linee di
forza sono più o meno a forma di un pallone da calcio con l'angolo del magnete
nel centro di gioco del calcio. In
realtà, ci sono molti strati di queste linee di forza magnetica, quindi è come
avere tutta una serie di palloni da calcio gradualmente più grande e più grande
tutto centrato sull'angolo del magnete. È estremamente difficile disegnare quelle
linee e mostrare loro chiaramente. Libro
di Howerd Johnston "Il Mondo Segreto
di Magneti" vi darà una buona idea delle linee di forza effettive
intorno una barra magnete. La disposizione di queste linee di forza magnetica
non è generalmente noto e se hai Google ' magnetic lines of force images ' solo troverete la finzione
insegnata nelle scuole. Tuttavia, il fatto importante è che c'è un campo
magnetico rotante ad ogni angolo di una tipica barra magnetica. Ne consegue
quindi che se una fila di magneti è posto a un angolo, poi ci sarà un campo
netto risultante in una sola direzione.
Ad esempio, se i magneti sono ruotati quarantacinque
gradi in senso orario, quindi il risultato sarebbe come questo:

Con questa disposizione, gli angoli opposti dei magneti, come mostrato qui, sono più in basso e quindi ci dovrebbe essere una forza netta magnetica spinta verso destra appena sopra la serie di magneti. Tuttavia, la situazione non è così semplice e lineare come si potrebbe immaginare. Le altre linee di forza magnetica che non sono stati indicati nello schema di cui sopra, agire più lontano dai magneti e interagiscono, creando un complesso campo magnetico composito. E 'frequente che, dopo quattro o cinque magneti che un divario breve deve essere lasciato prima che la linea di magneti è proseguito.


Due ragazzi: Anthony e Andreas, hanno utilizzato questa soluzione magnete per creare una traccia magnetica e hanno un sacco di divertimento, l'invio di un magnete di scorrimento tra due di questi file di magneti inclinati. Inizialmente, hanno usato i magneti più economici in ceramica e ha un movimento molto soddisfacente quando si utilizza un magnete al neodimio come componente mobile:

Noterete che sono riusciti una fila di 18 magneti in ceramica su ogni lato della loro pista e che i risultati che stanno ottenendo sono molto buoni. Hanno tre video sul web al momento attuale:
https://www.youtube.com/watch?v=Vo2-Qb3fUYs
https://www.youtube.com/watch?v=VeXrFfw4RSU
https://www.youtube.com/watch?v=VTbFfEEE_qU
Il magnete mobile è composto da quattro 12 mm x 12 mm x 12 mm (o mezzo pollice di mezzo centimetro per centimetro) magneti al neodimio fissati Nord - Sud - Nord - Sud -Nord - Sud - Nord - Sud:

Essi non hanno rivelato tutti i dettagli di ciò che stanno utilizzando (accidentalmente piuttosto che l'intenzione). Magneti dello statore in ceramica sono 48 mm x 20 mm x 10 mm con i poli su ciascuna delle facce principali. Posizionano ciascun magnete con il suopolo nord rivolto verso la pista e angolare i magneti a 45 gradi. È di 15 mm tra i magneti dello statore ei magneti mobili su entrambi i lati del binario. Listelli dirigere i magneti in movimento.
Magneti al neodimio hanno caratteristiche molto diverse da quelle dei magneti ceramici (e che non è solo la forza del campo magnetico). Non è insolito per sperimentatori per trovare che i dispositivi funzionano bene con un tipo di magnete, ma non con l'altro tipo. Qui gli sviluppatori hanno anche provato con due serie di cinque magneti al neodimio ad angolo su ogni lato della loro pista e il risultato è stato una spinta più potente sul loro magneti in movimento.

I magneti sono tenuti in posizione in figura, mediante tasselli di legno conficcati nella tavola base. Hanno usato questi in modo da evitare qualsiasi magnete-fissaggio materiale che potrebbe alterare il campo magnetico.
Il passo successivo sarebbe per loro di alimentare un motore con la loro tecnica magnetica traccia. Tuttavia, questo è stato provato molte volte e la conclusione è che è MOLTO difficile cambiare un binario diritto magnetico in una che forma un cerchio completo. Pertanto, vorrei suggerire la seguente disposizione:
Qui, un rotore semplice disco ha quattro magneti (del tipo utilizzato per spostare verso il basso la traccia magnetica) fissato al lato inferiore del disco e in modo che si muovono attraverso quattro serie di brevi magneti dello statore angolate con la rotazione del disco. Non importa se l'albero del rotore è orizzontale o verticale. Se il disco gira bene, quindi imposta due aria-core bobine di prelievo può essere posizionato tra ciascuna delle matrici magneti dello statore in modo che l'energia elettrica è generata da magneti del rotore passa da sovraccarico. Se un costruttore decide di attaccare due dischi rotorici all'albero un rotore, quindi i due rotori devono essere posizionati in modo che il rotore viene spinto ogni 45 gradi di rotazione anziché ogni 90 gradi, come mostrato qui. Questo tipo di motore è sicuramente nell'ambito della persona media per costruire dovrebbero essere inclini a farlo.
Mi è stato chiesto di dire come personalmente vorrei andare sulla costruzione di un prototipo di questa natura. Come ho già molto limitata abilità costruttiva, sarebbe fare come questo:
Per il cuscinetto, vorrei scegliere un computer
ventola di raffreddamento come questi hanno cuscinetti molto buoni e se uno è
non a portata di mano all'interno di un vecchio, computer obsoleti, quindi essi
possono essere acquistati molto, molto a buon mercato. Il diametro della ventola
non è importante. Questi ventilatori in genere guardare qualcosa come questo:

Come parte della ventola che gira intorno non progetto normalmente sopra il telaio fisso, un disco di spaziatura di legno o di plastica è necessario per fornire la liquidazione. Il disco è incollato al centro della ventola utilizzando forse, impatto Evostick, super colla o resina epossidica. Sarebbe quindi simile a questa:
Un pezzo quadrato di legno quindi può essere
avvitato per il distanziale, come questo:

Come sto molto male a creare dispositivi meccanici
di buona qualità, sarebbe quindi tenere una matita molto costantemente contro
un sostegno e dare al legno un giro, così che la matita disegna un cerchio
perfetto esattamente centrato sul cuscinetto del ventilatore. Quindi, così che
non c'è dubbio quanto a che modo rotondo il legno è attaccato al distanziale di
marcatura il legno e il distanziale, vorrei Svitare il legno e tagliare intorno
alla linea di matita molto attentamente, lisciando i bordi del disco delicatamente
con carta vetrata fine. Avvitare il disco al suo posto, un giro dovrebbe
confermare che il bordo del disco rimane costantemente in posizione con senza
tentennamenti del bordo. In realtà, se il disco non è perfetto, che non è un
problema importante come è i magneti di rotore che devono essere posizionati
con precisione, e per questo, un'altra linea di matita può essere prodotto
facendo girare il disco quando è stata determinata la posizione desiderata.
Magneti permanenti variano enormemente in dimensioni
e forza, così quando magneti vengono acquistati, è una questione di test
utilizzando una traccia del tipo usato da Anthony e Andreas. Statore magneti
sono inclinati a circa 45 gradi per la pista e con solo quattro per ciascun
lato, è un caso di trovare la spaziatura tra le due serie di magneti angolati
che spinge i magneti dello statore più lontano lungo la pista.
Muammer Yildiz Motore Magneti Permanenti.
Muammer Yildiz ha sviluppato un potente motore a magneti permanenti, è brevettato, e dimostrato al personale e agli studenti di un'università olandese. Durante la dimostrazione, la potenza meccanica è stato stimato a 250 watt e subito dopo la dimostrazione, il motore è stato completamente smontato per dimostrare che non ci fossero fonti di energia nascoste. C'è un video che mostra questa manifestazione, che si trova al seguente indirizzo:
http://pesn.com/2010/04/22/9501639_Yildiz_demonstrates_magnet_motor_at_Delft_University/


Si prega di notare che questa è una traduzione del testo tentativo di lingua tedesca del suo brevetto e così, la precisione del contenuto non è assolutamente certo, anche se è probabile che sia ragionevolmente accurata.
Brevetto EP
2,153,515 17 febbraio 2010
Inventore: Muammer Yildiz
 DISPOSITIVO DI AVERE UNA
DISPOSIZIONE DEI MAGNETI
DISPOSITIVO DI AVERE UNA
DISPOSIZIONE DEI MAGNETI
ASTRATTO
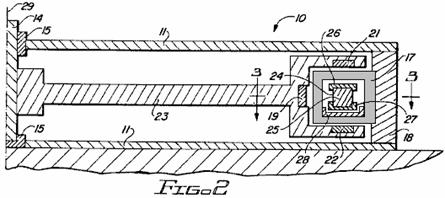
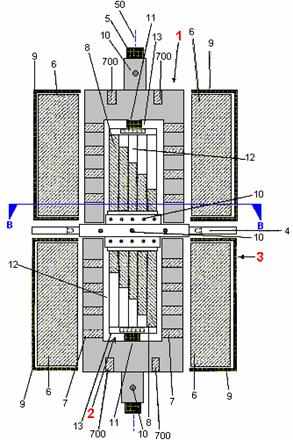
Il dispositivo ha un albero motore rotante 5 supportato assiale in modo che ruoti all'interno di uno statore 2, che è circondata da uno statore esterno 3. Il rotore è saldamente collegata all'albero motore. L'esterno dello statore ha magneti dipolo 6 che sono posizionati sulla superficie interna di un cilindro circolare 9. Questi magneti esterni sono distribuiti uniformemente attorno alla superficie del cilindro circostante.
DESCRIZIONE
Questa invenzione è un dispositivo per la generazione di un campo magnetico alternato che interagisce con un campo magnetico stazionario. L'interazione di un campo magnetico stazionario con un campo magnetico alternato è stato utilizzato per un certo tempo, per esempio in motori brushless DC e in levitazione magnetica.
Uno scopo della presente invenzione è quello di realizzare un dispositivo migliorato per la generazione di un campo magnetico alternato che interagisce con un campo magnetico stazionario. Questo risultato è ottenuto come descritto nella rivendicazione 1, per la particolare disposizione dei magneti dipolo dello statore interno, il rotore e lo statore esterno che crea un effetto magnetico che mantiene il rotore fluttuare liberamente tra lo statore interno e l'esterno dello statore, e questo agisce come un cuscinetto magnetico.
Sorprendentemente, è stato dimostrato che la particolare disposizione dei magneti dipolo dello statore interno, il rotore e lo statore esterno durante la rotazione del rotore, genera un campo magnetico alternato è che permette un movimento largamente senza perdita del rotore come giri tra l'interno dello statore e l'esterno dello statore. Questo effetto molto utile può essere utilizzato per una varietà di applicazioni tecniche, per esempio, un cuscinetto particolarmente basso attrito è preferito per supportare un albero che deve ruotare a velocità elevata.
Nella descrizione che segue, in cui termini matematici, in particolare termini geometrici, vengono utilizzati - termini come "parallelo", "perpendicolare", "piano", "cilindro", "angolo", ecc come è tipico nella produzione di disegni tecnici, ma si deve comprendere che queste cose non sono raggiunti in pratica, a causa delle tolleranze di fabbricazione deicomponenti. È quindi importante capire che questa descrizione si riferisce alla situazione ideale, che non sarà mai raggiunto. Pertanto, il lettore deve capire che tolleranze generalmente accettate saranno coinvolti nella pratica.
L'albero di uscita ruota attorno a un asse, denominato "asse dell'albero". Dell'albero stesso è preferibilmente costruito come un cilindro retto di sezione circolare.
In una forma di realizzazione preferita di questa invenzione, i magneti sporgere leggermente fuori dallo statore interno. Questo è anche il caso sia per il rotore e lo statore esterno. Una parziale sovrapposizione di due magneti si ottiene quando un piano perpendicolare all'asse dell'albero, passa tra i due magneti e due magneti sono considerati sovrapporsi se si verifica questa situazione.
Una parziale sovrapposizione di tre magneti si verifica quando un piano perpendicolare all'asse dell'albero attraversa ciascuno dei tre magneti. Il grado di sovrapposizione non influenza la descrizione e la quantità di sovrapposizione di due qualsiasi dei tre magneti può essere nulla da 1% a 100%, in cui i magneti sovrappongono completamente.
In una realizzazione particolarmente preferita dell'invenzione, i magneti dello statore interno e il rotore sono in grado di allineare completamente. In aggiunta a questo, lo statore esterno è costruito in modo da poter essere ruotato attorno all'asse dell'albero in modo che il rapporto di contatto tra i magneti del rotore ed i magneti dello statore esterno può essere aggiustata per ottenere un certo grado di sovrapposizione tra 0% al 100%.
Tre cilindri immaginari sono prodotti. Uno dai magneti dello statore interno, un secondo dai magneti del rotore quando ruotano attorno all'asse dell'albero ed il terzo è creato dai magneti dello statore esterno. Gli assi di questi tre cilindri è uguale all'asse dell'albero.
Idealmente, il rotore avrà la forma di un tamburo o una tazza, cioè un cilindro cavo con una sezione circolare o un pezzo di tubazione una cui estremità volto coperto da disco circolare. Nel centro del disco, il rotore ha un foro attraverso il quale passa l'albero. Il disco può anche avere un collare che viene utilizzato per bloccare il rotore all'albero mediante un bullone passante per l'albero motore o da grani filettati nel collare. Qualunque sia il metodo utilizzato, il gruppo del magnete del rotore sia ben collegato all'albero motore. L'uso di una vite di serraggio ha il vantaggio di permettere il rotore per essere smontato per manutenzione o riparazione. La sezione cava cilindrica del rotore, è disposta in modo che vi sia un piccolo traferro tra essa e le due statori interno ed esterno.
Il cilindro cavo rotore ha due, o più, magneti permanenti montati su di esso. Questi sono equidistanti lungo la circonferenza del cilindro rotore e posizionato in modo da essere parallelo all'asse dell'albero motore. L'esterno dello statore ha forma cilindrica e circonda il rotore, lasciando un piccolo spazio d'aria tra loro e suo asse sia allineato con l'asse dell'albero motore. Idealmente, i magneti montati sulla parte interna del cilindro esterno dello statore, sono allineati con l'asse dell'albero motore e loro facce polari sono ad angolo retto rispetto all'asse dell'albero. Vale a dire, una linea tracciata attraverso il polo nord e sud si affaccia di questi magneti punterà l'albero di trasmissione, e quindi una faccia poli si troveranno ad affrontare il rotore.
E 'anche possibile per i magneti dello statore esterno per essere a forma di asta e per formare un anello completo attorno alla faccia interna del cilindro esterno dello statore. Se questo è fatto, poi gli anelli magnetici devono essere separate l'una dall'altra da distanziatori non magnetici e l'intera lunghezza dello statore esterno sarà coperto con questi anelli magnetici e distanziali. In questo caso, gli statori interno ed esterno sono montati in un rapporto fisso tra loro mediante staffe o altri metodi di montaggio.
Idealmente, il rotore viene tenuto in posizione dai campi magnetici delle due statori e "galleggia libero" tra di loro. Questo è il metodo preferito. Tuttavia, è possibile che l'albero di azionamento per eseguire l'intera lunghezza del dispositivo e di essere sostenuti in cuscinetti a rulli.
Una costruzione è possibile avere sia degli statori realizzati in due parti separate. Questi devono essere esattamente simmetrica rispetto all'asse dell'albero motore. I pezzi statore esterno può anche essere predisposto per essere in grado di regolazione di rotazione rispetto allo statore interno che ha sempre una posizione fissa. Un'altra opzione con questa particolare disposizione è quello di avere la distanza delle componenti statore esterno regolabili, in modo che il traferro tra rotore e statore esterno i magneti possono essere regolati manualmente.
Un angolo "alfa" è definito come l'angolo tra l'asse magnetico di un magnete dello statore interno e una tangente alla circonferenza dello statore interno in quel punto. Un "beta" angolo viene definito come l'angolo tra l'asse magnetico di un magnete del rotore e una tangente alla circonferenza del rotore in quel punto. Un "gamma" angolo viene definito come l'angolo tra l'asse magnetico di un magnete dello statore esterno e tangente alla circonferenza dello statore esterno in quel punto. In una forma di realizzazione preferita della presente invenzione, ciascuno di questi angoli è tra 14 gradi e 90 gradi.
È un vantaggio particolare se i magneti permanenti sia statore interna ed esterna hanno una o rettangolare o trapezoidale sezione quando visto come essere tagliata da un piano perpendicolare all'asse dell'albero. È inoltre particolarmente vantaggioso se i magneti del rotore hanno una sezione circolare se visto come essere tagliati da tale piano perpendicolare all'asse dell'albero. Altri, non simmetrici magnete sezioni sono possibili, come ad esempio sezioni trapezoidali, triangolari, o di forma irregolare.
È possibile che tutti i magneti dello statore interna avere forme identiche. Analogamente, è possibile che tutti i magneti dello statore esterno avere forme identiche. E 'anche possibile per tutti i magneti
I magneti dello statore interno, il rotore e lo statore esterno hanno un orientamento magnetico che induce a respingersi in ogni posizione angolare del rotore. Ad esempio, i magneti dello statore interno può avere i loro poli Nord rivolte verso l'esterno e in tal caso, i magneti del rotore avranno i loro poli Nord rivolti verso l'interno verso l'interno dello statore. Allo stesso modo, i magneti dello statore esterno sarebbe quindi hanno i loro poli Sud rivolto verso l'interno, al fine di respingere gli (esterno), i poli sud dei magneti del rotore.
Ulteriori caratteristiche, dettagli e vantaggi dell'invenzione risulteranno evidenti dalla seguente descrizione di una forma di realizzazione dell'invenzione e dei disegni associati come mostrato qui:
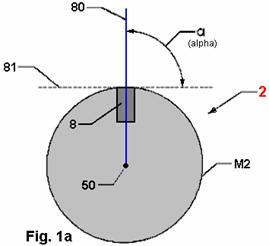
Fig.1 è una rappresentazione
schematica del dispositivo.
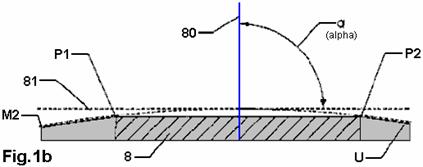

Fig.2a è una vista obliqua del
statore interno senza magneti e Fig.2b è
una vista dello statore interno perpendicolarmente all'asse dell'albero.

Fig.3 Mostra una disposizione per
il magnete interno dello statore.

Fig.4 una sezione attraverso
l'interno dello statore, lungo la linea A--A indicata
nella Fig.12b

Fig.5a è una vista del
dispositivo di fissaggio perpendicolare all'asse dell'albero e Fig.5b è una vista del dispositivo di
fissaggio nella direzione dell'asse dell'albero.


Fig.6 è una vista prospettica
del rotore.

Fig.7a è una vista schematica
dello statore e rotore interno. Fig.7b è un diagramma di possibile
angolo dell'asse magnetico dei magneti nel rotore;
Fig.8a mostra la disposizione
magnetico del rotore, lungo la direzione X-Y indicato in Fig.16. Fig.8b è una vista dettagliata
del rotore mostrato nella Fig.8a.
Fig.9a a 9h mostrano gli angoli di
insiemi di magneti installati nel rotore quando visto dal lato. Questi sono
mostrati in maggiore dettaglio più avanti in questa descrizione..
Fig.10 mostra la posizione delle
stringhe magneti incorporati nel rotore. Questi sono in dettaglio più avanti.
Fig.11 mostra la disposizione
dei magneti su entrambi statori e il rotore, indicata come una sezione lungo
l'asse dell'albero.
Fig.12a mostra la disposizione dei magneti del rotore, come si vede in una vista ortogonale all'asse longitudinale del rotore.
Fig.12b mostra la disposizione
dei magneti del rotore, come si vede in una vista ortogonale all'asse
longitudinale del rotore.
Fig.13 mostra il posizionamento a gradini dei magneti del rotore. Questa vista mostra la superficie del rotore ed il suo albero, apriva e disteso in piano. Cioè, lo spettacolo rettangolo qui è effettivamente la totalità della superficie cilindrica del rotore. In questa vista, le alette tra i magneti non mostra per sottolineare il passo dei magneti rispetto all'altro.
DESCRIZIONE
DETTAGLIATA
Fig.1 mostra una rappresentazione schematica del dispositivo avente uno statore interno 2, un rotore 1 ed uno statore esterno 3, che sono disposti coassialmente attorno all'asse dell'albero 50 di un perno astiforme albero 5. Lo statore interno cilindrico 2 presenta a ciascuna estremità, un cappuccio terminale 13 che è nella forma di un disco circolare con un cuscinetto a sfere 11 montato su di esso. Il cuscinetto 11, mantiene la posizione interna dello statore 2 rispetto all'albero 5. L'albero di azionamento 5 è normalmente costituito da un materiale non magnetico come plastica, (non acciaio) e tipicamente, ha un diametro di 10 mm a 40 mm e una lunghezza di 100 mm a 400 mm.
L'interno dello statore 2 presenta un nucleo 12 con magneti 8 montato sulla sua superficie esterna. L'interno dello statore 2 è tenuto fermo da un dispositivo 4 di montaggio, che viene fissato in posizione in un contenitore metallico (non mostrato), e viene tenuta saldamente fissato in questo modo.
Il rotore 1 è costituito da due speculari tamburi rotore, ciascuno con una sezione di tubo e di una sezione di disco circolare che è rigidamente fissata all'albero motore 5 mediante perni filettati 10. Ciascuno dei tamburi rotore ha magneti 7 montato su di esso. Questi magneti 7, sono posizionati in cinque punti distinti e hanno un polo magnetico rivolto verso l'albero e l'altro polo rivolto radialmente verso l'esterno.
I tamburi rotore sono posizionati in modo che ci sia un traferro cilindrico tra loro e l'interno dello statore 2. Questo traferro è generalmente dell'ordine di 3 mm a 50 mm. Sebbene le due metà del rotore sono separati dal 4 meccanismo di bloccaggio che impedisce lo statore interno dalla rotazione, le due metà del rotore sono posizionati in modo che i magneti in essi sono in equilibrio e quindi non c'è forza irregolare generato quando l'albero 5 è filata ad alta velocità. Alle estremità dei tamburi rotore vi sono 700 magneti come l'obiettivo di questo progetto è di avere il rotore sospeso magneticamente.
L'esterno dello statore 3 è composto da due cilindri mezzo separati 9. Ciascuno di questi cilindri 9, contiene magneti 6 montato sul suo lato interno. Benché ogni sezione dello statore esterno è costituito da un cilindro cavo, le estremità esterne del corpo statore formare un disco completo che circonda l'albero motore 5 e formando un involucro completo invece di lasciare il dispositivo aperto alle estremità. Vi è uno spazio d'aria tra le facce dei magneti montati sulla superficie interna della cornice cilindrica 9 e le facce dei magneti montati sul rotore. Questi insiemi di magneti di fronte all'altro e il traferro tra loro è anche tipicamente 3 mm a 50 mm. I magneti su ciascuno dei statori sono paralleli all'asse dell'albero 50. Gli statori esterno è costruito in modo che possa essere spostato rispetto allo statore interno, alterando così la loro sovrapposizione magnetici. Questa alterazione può essere effettuata spostando il statore esterno quando il motore è effettivamente in esecuzione.
I magneti designati 6, 7, e 8, sono magneti dipolo e in una forma di realizzazione preferita, questi sono magneti permanenti, per esempio, costituito da SmCo (Samaria cobalto) e / o NdFeB (neodimio / ferro / boro). E 'anche possibile che uno o più di questi magneti per essere un elettromagnete. La densità del flusso magnetico dei magneti 6, 7, e 8 è preferibilmente in un intervallo 0,4-1,4 Tesla.
Il telaio è realizzato preferibilmente da un materiale non magnetico come alluminio con uno spessore da 2 mm a 10 mm.
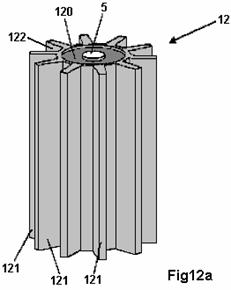
Fig.12a mostra un telaio interno statore costituito da un materiale non magnetico (ad esempio alluminio o rame). Il telaio 12 presenta un cilindro circolare 120 che è attaccato alla sua superficie esterna, nervature radiali 121. Ciascuna di queste nervature estende lungo l'asse centrale del cilindro 120 per tutta la lunghezza del cilindro, cioè dalla sua base 'alla superficie superiore. Le nervature sono distribuiti uniformemente lungo la circonferenza del cilindro, formando scanalature 122. Cilindro 120 ha un foro centrale lungo il suo asse per albero 5 a scorrere. Entrambe le superfici di estremità del cilindro 120 sono incassati per accogliere uno dei cuscinetti a sfera 11. Il diametro del nucleo di statore 12 è tipicamente da 50 mm a 500 mm con una lunghezza di 100 mm a 300 mm. La larghezza del nervature 121 è generalmente non più di 100 mm ed è di solito circa 20% della lunghezza delle nervature 121.
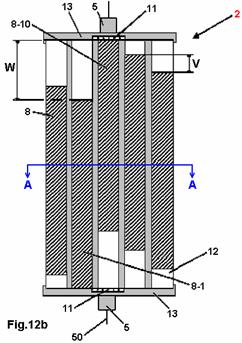
Fig.12b mostra una rappresentazione schematica
La fine tappi 13 hanno un diametro di 50 mm a 500 mm e spessore di 5 mm a 20 mm. Una lunghezza tipica di magneti 8 è 100 mm. Le dimensioni magnete sono disposte in modo che quando sono posizionate nelle scanalature 122, l'interno dello statore 2 presenta una superficie esterna sostanzialmente uniforme.
Fig.13 mostra una vista aperta-out della superficie esterna dello statore interno 2. Qui, dieci magneti 8 sono
disposti con spaziatura uniforme. La faccia inferiore del cono magneti nella direzione dell'asse dell'albero 50
e quindi hanno una larghezza minore, vicino al centro dello statore quanto non facciano sulla superficie esterna. 8-1 il primo magnete è posizionato con la sua faccia di estremità allineata con la base 125 del nucleo statore interno 12. Rimanenti nove magneti (8-2 a 8-10) sono ciascuno compensati dalla somma V con magnete 8-10 ultimi raggiungono la superficie superiore del nucleo dello statore interno 126.

Fig.14 mostra una sezione trasversale attraverso lo statore interno 2 lungo il piano A -A di Fig.12b. L'interno dello statore 2 presenta una cavità 120 cilindro, attraverso il quale l'asse centrale dell'albero 5 passaggi. Corre lungo la superficie esterna del cilindro sono le costole 121. Il cilindro cavo 120 ha tipicamente un diametro di 100 mm e una lunghezza di 170 mm. I vuoti formati tra le nervature 121 i magneti 8 sono posti. Quando visto nel piano A -A questi magneti hanno una sezione trasversale trapezoidale. Questi magneti hanno due poli magnetici ed i magneti sono posizionati in modo che l'asse magnetico 80 che passa attraverso i due poli è radiale all'interno del piano di sezione A -A. Un angolo α [alpha] formata alla intersezione dell'asse di dipolo magnetico di un magnete 80 8 e il 81 tangente alla nervature 121 può avere un valore compreso tra 14 gradi e 90 gradi. Nel caso mostrato in Fig.14 L'angolo alfa è di 90 gradi.
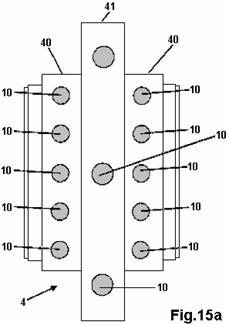
Fig.15a mostra il dispositivo di fissaggio 4 in una vista perpendicolare all'asse dell'albero 50. Il 4 dispositivo di fissaggio ha un interno cavo 40 cilindro con un raggio più piccolo ed una esterna piastra anello di fissaggio 41 con grande raggio. Il cilindro interno cavo 40 e l'anello esterno piastra di fissaggio 41 sono collegati insieme. Il cilindro cavo 40 è utilizzato per ricevere e fissare l'interno dello statore 2 per mezzo di viti 10. L'anello di fissaggio 41 è parte di un contenitore metallico (non mostrato) per trattenere il dispositivo saldamente posizionata.
Fig.15b mostra il dispositivo 4 di fissaggio in una vista nella direzione dell'asse dell'albero 50. Piastra anello di montaggio 41 ha a propria periferia, quattro viti 10 per il fissaggio al contenitore metallico del cilindro cavo 40, che presenta sulla sua circonferenza, una pluralità di viti 10 per il fissaggio statore interno in posizione.
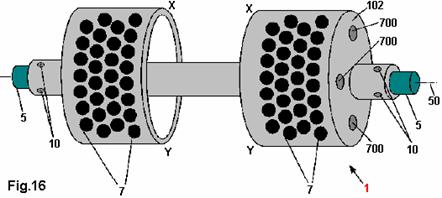
Fig.16 è una vista del rotore 1, che è fissata all'albero 5 tramite le viti 10. Il rotore 1 è costituito da due tamburi separati fissata ad un albero centrale cavo. Montato nella sua superficie esterna una serie di magneti 7 affondato in fori circolari. Rotore stesso è costruito utilizzando un materiale non magnetico come alluminio o rame. La distanza tra i due tamburi rotore è di 15 mm e hanno un diametro esterno di 165 mm, un'altezza di 70 mm e uno spessore di 26 mm. Ogni tamburo rotore ha una superficie superiore del disco anulare 102, in cui due o più magneti 700 sono affondate. Questi sono posizionati in modo uniforme attorno alla circonferenza del disco, come mostrato nel diagramma. L'asse di dipolo magnetico dei magneti 700 è parallelo all'asse dell'albero 50.
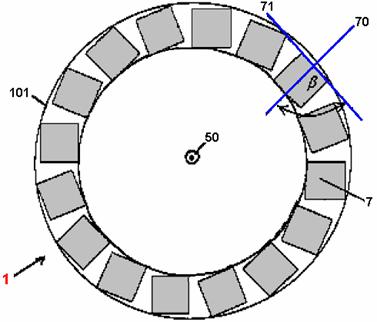
Fig.17a è una rappresentazione schematica dei possibili orientamenti del rotore magneti 7 quando visto come visto guardando parallelamente all'asse dell'albero 50. L'asse magnetico del rotore 70 dipolo magneti sette è in un piano radiale all'asse di albero 50. L'angolo β [beta] tra l'asse di dipolo magnetico 70 e la tangente 71 sfonda la periferia esterna del cilindro cavo 101 del rotore 1 e questo angolo può avere valori tra 14 gradi e 90 gradi.
Fig17b è una vista schematica di un tamburo del rotore e dello statore parte interna 2, in cui la vista è perpendicolare all'asse dell'albero 50. Il rotore 1 è fissato all'albero 5 tramite le viti 10 e tenuto rigidamente in posizione. L'albero 5 passa attraverso un cuscinetto a sfere inserto nello statore interno 2 e quindi può ruotare liberamente rispetto allo statore interno. Il rotore ha due tamburo, o campana, sezioni che circondano l'interno dello statore. Il rotore 1 presenta una sezione cilindrica cava 101, che si estende dalla superficie superiore 102. Poiché l'interno dello statore è fisso e impedisce la rotazione da esso è dispositivo di ancoraggio (componente 4 in Fig.1), il rotore gira il cilindro cavo 101 intorno. Il cilindro cavo 101 del rotore 1 è separato dallo statore interno 2 da un traferro anulare G1. L'incavo 101 cilindro del rotore 1 ha magneti 7 affondate nei fori in esso. La superficie superiore 102 del rotore 1 presenta inoltre fori in esso e questi sono utilizzati per installare il 700 magneti in esso.
Fig.18a mostra le superfici esterne delle due metà del tamburo rotore 1 distesi anziché curvato in un cerchio nel X -piano Y in Fig.16. Questa superficie è perpendicolare all'asse dell'albero 50 e sono posizionati righe di magneti 7 in righe 701-708. Ciascuna di queste righe è leggermente spostata rispetto alla fila accanto, risultante in un zig-zag disposizione dei magneti 7.
Fig.18b mostra in dettaglio ingrandito, il posizionamento
La lunghezza d varia da circa 3 mm a 50 mm. Una distanza che è particolarmente preferito, è di 5 mm. I f gamme delle distanze da circa 10 mm a 70 mm.
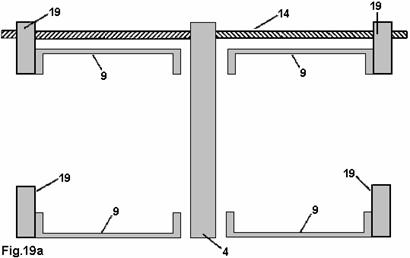
Fig.19a mostra una sezione longitudinale del contenitore metallico del dispositivo, cioè una sezione parallela all'asse dell'albero 50. L'alloggiamento meccanico comprende il pezzo di supporto 4 per il bloccaggio interno dello statore 2 per impedirne la rotazione, il supporto 19 per guidare le parti mobili dello statore esterno 3, ed uno stelo filettato 14 rotante che può spostare entrambe le metà dello statore esterno 3 rispetto al rotore e /
o l'interno dello statore 2. L'albero ingranaggio 14 ha due sezioni filettate con fili che corrono in direzioni opposte (filettature a destra e sinistra). La rotazione di tale albero provoca le due metà dell'alloggiamento esterno dello statore per spostare in modo simmetrico in direzioni opposte, verso l'interno o verso l'esterno. I dispositivi di guida 19 sono montati sull'albero primario 14 e quindi muoversi solo in un piano. Le sezioni cilindriche esterne 9 che casa lo statore esterno 3 sono fissati saldamente all'estremità tappi 19. Tipicamente, questo alloggiamento meccanico ha una altezza di 400 a 600 mm, una larghezza di 400 mm e una profondità di 530 mm.
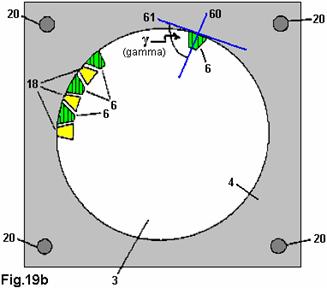
Fig.19b è una sezione attraverso lo statore esterno 3, il piano di sezione perpendicolare all'asse dell'albero 50. L'esterno dello statore 3 è disposto in esso, un anello di fissaggio non magnetiche 18, tra cui i magneti sono fissati 6. Per ragioni di chiarezza, solo alcuni dei magneti 6 sono presenti anche se questi magneti sono montati su tutta la circonferenza dello statore esterno 3. La dimensione dei magneti 6 e gli elementi di fissaggio non magnetici 18 è scelto in modo da formare un cilindro cavo, il cui asse centrale è nella direzione dell'asse dell'albero 50. L'asse di dipolo magnetico 60 dei magneti 6 sono perpendicolari all'asse dell'albero 50. Un angolo γ [gamma] tra l'asse di dipolo magnetico 60 e 61 tangente alla periferia esterna del cavo 3 cilindrico esterno dello statore è compreso tra 14 gradi e 90 gradi. L'esterno dello statore 3 è collegato al blocco di montaggio 4, che comprende le colonne di fissaggio 20.
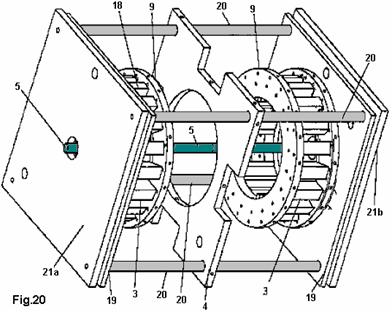
Fig.20 è una vista prospettica del contenitore metallico del dispositivo. Ulteriori dettagli pratici sono disponibili nel brevetto.
Donald Kelly Motore Magneti Permanenti.
Nel 1979, il signor Kelly è stato concesso un brevetto su un motore a magnete permanente del design. Egli commenti che oltre che essere molto difficile generare potenza sufficiente per spostare meccanicamente magneti dello statore leggermente per ottenere la rotazione continua, il tasso risultante di giri è molto bassa. Per tali motivi, si è scelto di spostare i magneti dello statore leggermente con piccoli motori DC. Il suo design è incluso qui perché è un concetto che è relativamente facile da capire. L'idea generale non è dissimile da quella di Stefano Kundel che
gira i magneti dello statore con un solenoide, come illustrato in precedenza in questo capitolo. L'obiettivo è quello di usare una piccola corrente elettrica per generare una rotazione potente molto maggiore di quanto sarebbe possibile dalla stessa corrente elettrica, e quindi, produrre ciò che è in effetti, una moltiplicazione di potenza attraverso l'uso di magneti permanenti. Una copia leggermente diversa del suo brevetto è mostrata in Appendice.

L'operazione è una strategia semplice. Otto serie di magneti sono montate su bilancieri. Questi hanno due posizioni principali. Nella prima posizione, i magneti bilancieri attirano i magneti montati sul rotore. Quando il rotore si sposta a causa di questa attrazione e raggiunge un punto in cui non è in procinto di essere un peso all'indietro sul rotore, la posizione dei bilancieri è modificato in modo che la prima serie di magneti bilancieri sono spostati fuori strada ad una posizione dove hanno scarso effetto a causa della loro distanza maggiore dal magneti del rotore. Questo movimento a bilico si muove anche magneti di polarità opposta che spingono i magneti del rotore sulla loro strada. In questo disegno, l'attrazione e la spinta sono applicati a diversi gruppi di magneti. Se l'attrazione è il magneti 1, 3, 5, ecc allora la spinta è di magneti 2,4,6, ecc Ma, nonostante ciò, la spinta e vengono applicate a ogni magnete del rotore che passa. La potenza necessaria per azionare il motore elettrico è minimo come la potenza del motore è fornita dai magneti. Invece di due motori piccoli, sarebbe possibile azionare i bilancieri utilizzando solenoidi piccole e se il motore viene usato per alimentare un generatore elettrico, quindi il disegno potrebbe essere autoalimentato utilizzando parte della produzione elettrica da fornire la necessaria potenza di ingresso. Il disegno qui sopra mostra un solo strato del motore, ma ci possono essere strati come che vuoi, ognuno di questi aziona l'albero di singola uscita, e aumentando il suo potere ad ogni livello.
Motore a Magnete "Perendev" di Mike Brady.
Uno dei motori a magneti permanenti più noto è il motore "Perendev", che cattura l'immaginazione di molte persone. Si dice che decine di questi motori sono stati fatti e venduti come motori / generatori con una potenza non inferiore a 100 kilowatt. Per quanto ne so, questo non è stato confermato, non ci sono stati test indipendenti effettuate sul motore diverso da un breve test da Sterling Allan. Tuttavia, vorrei sottolineare ancora una volta che è molto difficile ottenere qualsiasi magneti permanenti solo esercizio del motore ed è molto più facile per iniziare con uno come il motore Adams mostrato nel capitolo 2, o il Charles Flynn motore illustrato in precedenza in questo capitolo. Si prega di notare anche che i magneti utilizzati in questo progetto sono non standard magneti e così sarà difficile da ottenere e, probabilmente, molto costoso a causa di questo e specializzato schermatura magnetica viene utilizzata.
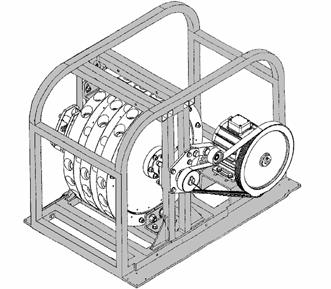
Brevetto di Mike WO 2006/045333 A1 del 4 maggio 2006, è mostrata in appendice. A metà del 2010, Mike aveva tanta difficoltà a ottenere il suo design nella produzione commerciale che i suoi finanziatori sono più insoddisfatti della situazione, e se Mike sta avendo difficoltà a replicare (come ha fatto Howard Johnson con il suo motore a magneti), poi un nuovo arrivato questo campo farebbe bene a restare con i motori a magneti che utilizzano il movimento dei magneti dello statore, come Don Kelly, Stephen Kundel e altri, o con motori a magneti meccanico o elettrico, come la schermatura Flynn Charles motore, il Robert Tracy motore, o Jines il motore.
La Schermatura Magnetica della Pasi Mäkilä
Un metodo per bloccare un campo magnetico
utilizzando materiali semplici, si formano Pasi Mäkilä della Finlandia. Suo
video mostrare questo è a https://www.youtube.com/watch?v=14ayyu9PVSI e
si concentra sulla immissione schermatura intorno un magnete cilindrico:

Tuttavia, quando viene utilizzato come protezione
generale, una serie di acciaio piatto e strati di alluminio può essere
utilizzata e mentre Pasi utilizza 1,5 mm spessore e zincato lamiera alluminio 1
mm spessore egli suggerisce usando fogli più sottili. Egli suggerisce usando quattro strati di
acciaio con un foglio di alluminio tra le lamiere di acciaio e forse uno o più
strati di alluminio all'esterno. Obiettivo
principale di Pasi è quello di condividere questa disposizione per permettere
alle persone di fare motori a magnete permanente. Una disposizione che potrebbe essere la pena
di provare è utilizzare la schermatura per bloccare il trascinamento
all'indietro dei magneti di rotore passando magneti dello statore, forse come
questo:
Con questa
disposizione, i poli sud dei magneti di rotore sono attratti ai poli nord
esposti dei magneti dello statore, causando il rotore ruotare. Appena un rotore
sud passa statore
Abbiamo poi la repulsione del polo nord del
magnete statore e il polo nord del magnete rotore. Per bloccare che, una breve
lunghezza della schermatura è posizionata accanto alla fine del polo nord del
magnete rotore. Probabilmente sarebbe un vantaggio per eseguire il polo nord di
statore schermatura sopra la parte superiore e parte inferiore del magnete
rotore per causare blocco magnetico principali.
Questo disegno di un motore magnetico è solo un
suggerimento e non ancora è stato costruito e testato.
Il Suggerimento di Due
Rotori
Quando pensi di schermatura magneti utilizzando
ferro o acciaio, è necessario ricordare che calamite frigo bastone a
frigoriferi perché i frigoriferi sono realizzati in acciaio. Ciò dimostra il
fatto che c'è un'attrazione tra magneti e di ferro o di acciaio. Di
conseguenza, se un magnete è schermato con acciaio in modo che blocca tutto il
campo magnetico del magnete, un secondo magnete sarà attratti a quel metallo
materiale di schermatura. Presso http://www.youtube.com/watch?v=vUcWn1x3Tss c'è, al momento attuale, un video di
"magneticveil", dove egli propone l'utilizzo di questa funzione di
schermatura semplice nella costruzione di un motore a magnete.
Egli suggerisce usando due rotori orientata
insieme. I rotori hanno magneti su di loro, ma ai fini della spiegazione, solo
un paio di magneti sono mostrati qui:
Ogni magnete è attratto al materiale metallo scudo tra i rotori. Questo fa sì che i rotori a ruotare nella direzione indicata dalle frecce rosse. I magneti sono attratti al punto più vicino allo scudo che essi possono raggiungere come indicato qui:

A questo punto ti aspetteresti i rotori per
fermare lo spostamento e la serratura in una posizione stazionaria. Tuttavia,
l'idea interessante è quello di regolare la forma dello scudo come questo:
Alla fine dello scudo, la larghezza è ridotta e
rastremata in modo che il campo magnetico da magnete dietro esso corrisponde
esattamente l'attrazione del magnete sul lato dello scudo. Questo ha l'effetto
di dare una zona completamente neutrale alla punta dello scudo, con né
un'attrazione o una repulsione in quella regione. Il grado di rastrematura
dipende dalla forza i magneti, lo spessore e il materiale lo scudo e la
spaziatura tra i magneti e lo scudo, e ha bisogno di essere scoperti da
esperimento.
Questa zona neutra si ferma lì, essendo un pull principale tra i magneti e lo scudo, e così lo slancio trasporta i rotori oltre la fine dello scudo. Questo produce una situazione come questa:
Qui, i magneti hanno spostato oltre lo scudo e
l'altro sono fortemente repellente. Sono oltre gli assi dei rotori, quindi la
forza di repulsione produce un effetto di tornitura su ogni rotore. Questa è la
situazione con solo un paio di magneti, ma ogni rotore avrà molti magneti su di
esso. Questo produce un effetto di rotazione supplementare. Considerare solo un
altro paio di magneti, nella stessa posizione come nostro primo diagramma:
L'attrazione tra i magneti "A" e lo
scudo, aggiunge alla rotazione causata dalla Spinta tra i magneti non
schermati. Questa disposizione dei magneti e scudo dovrebbe consentire una
rotazione continua di entrambi i rotori e il motore può essere fermata
rimuovendo lo scudo.
Si noti che questa disposizione utilizza magneti
in modalità di repulsione. Cioè, i polacchi rivolte dei magneti su entrambi i
rotori sono uguali. Ci sono state segnalazioni di motori a magnete permanente
dove i magneti erano in modalità repulsione, e mentre questi motori ha
funzionato bene, si è constatato che dopo circa tre mesi, i magneti hanno perso
la loro magnetizzazione. Se possibile, i magneti devono essere utilizzati nella
loro modalità di attrazione. Questo non è possibile nella disposizione
twin-rotor sopra, quindi se uno è in costruzione, potrebbe essere una buona
idea per organizzare la costruzione fisica in modo che i magneti del rotore
possono essere facilmente rimosso. Questo permette di remagnetisation dei
magneti, o in alternativa, la loro sostituzione, se vengono utilizzati tipi
molto economici.
Il Motore a Magnete Permanente di Victor Diduck
Numero domanda di brevetto USA US2007/0296284 del 27 dicembre 2007, ci
viene mostrato un design convincente per un motore potente magnete permanente. Ecco uno delle incarnazioni di tale brevetto –
uno che sembra ragionevolmente facile da costruire.
Motore Magnetico
Astratto:
Un motore magnetico, avendo un complessivo di azionamento
magnetico magneticamente accoppiato a un assembly schiavo magnetico. L'Assemblea di auto ha almeno un magnete di
azionamento. In una incarnazione il
magnete di azionamento è montato su una cappottatura. In un'altra incarnazione il magnete di
azionamento è montato su una ruota di azionamento. L'Assemblea di schiavo abbia almeno una ruota
di schiavo montata su un albero di schiavo. Magnete almeno uno schiavo è montato sulla
ruota schiavo. In una incarnazione
magneti schiavo sono montati in scanalature corre diagonalmente attraverso la
faccia della ruota schiavo. In un'altra
incarnazione i magneti schiavo sono montati in tacche tagliate alla ruota di
schiavo. Il magnete di azionamento è
accoppiato magneticamente al magnete schiavo con i pali disposti in un
orientamento come facce come. Il divario
tra il magnete di azionamento e schiavo magnete può essere regolato per
ottimizzare l'accoppiamento magnetico il tra di loro. Ruota schiavo ed il suo albero di schiavo sono
causati per ruotare tramite l'accoppiamento magnetico tra il magnete di
azionamento e il magnete di schiavo. L'albero
di schiavo può essere accoppiato ad un dispositivo di output come un generatore
elettrico.
SFONDO DELL'INVENZIONE
Ci sono stati
vari tentativi di perfezionare i motori magnetici; per esempio, US Pat. N°
4.151.431 rilasciato al Howard Johnson. Tuttavia,
nella maggior parte dei tali dispositivi non modelli di lavoro sono stati
raggiunti. Al fine di rendere un motore
a magnete permanente a farlo funzionare è necessario realizzare una funzione di
commutazione equivalente a quello compiuto in motori elettrici di pennelli, commutatori,
corrente alternata o altri mezzi. Nel
magnete permanente dispersione magnetica motori deve essere schermati in modo
da ridurre l'energia perduto come energia di correnti parassite. Una corretta combinazione di materiali,
geometria e magnetico concentrazione è necessaria per poter costruire un motore
magnetico che può funzionare continuamente.
RIASSUNTO DELL'INVENZIONE
Un motore
magnetico è fornito comprendente un complessivo di azionamento magnetico
magneticamente accoppiati a un assembly schiavo magnetico. Il montaggio magnetico schiavo include un
albero di schiavo girevole su cui è montato almeno una ruota girevole schiavo. Su slave ruota è magnete montato almeno uno
schiavo. Il complessivo di azionamento
magnetico include almeno un magnete di azionamento che è accoppiato
magneticamente al magnete in un orientamento come facce come schiavo. Come risultato il magnetico accoppiamento tra
il magnete di azionamento e il magnete di schiavo, forze magnetiche prodotte
tra unità unità accoppiate slave e magnete magnete ruota girevole schiavo,
facendolo ruotare e quindi causando lo schiavo dell'albero di ruotare. L'albero di schiavo è accoppiato ad un
dispositivo di output come l'armatura di un generatore elettrico.
L'Assemblea di
schiavo è accoppiato a un fotogramma. Le ruote schiavo sono fissate all'albero
in modo che le ruote ruotano insieme. Ogni
ruota schiavo ha incorporato nella sua superficie una pluralità di magneti
schiavo impostato in rientranze tagliate nella ruota di schiavo. Un polo di ogni magnete schiavo è esposto e
rivolto verso l'esterno dalla superficie della ruota schiavo, e l'altro polo
del magnete affronta la ruota di schiavo. Sia il polo nord o il polo sud dello schiavo
magneti possono affrontare verso l'esterno, finché ogni magnete ha il palo
stesso verso l'esterno.
In una
incarnazione rientri nelle ruote per ricevere la forma di magneti schiavo
schiavo distanziati solchi paralleli, separati in esecuzione da un lato della
superficie della ruota schiavo a altro per ricevere i magneti di schiavo. L'angolo di ogni solco su tutta la superficie
della ruota schiavo è preferibilmente circa 35 gradi rispetto alla orizzontale.
La direzione di orientamento delle
scanalature di altro delle ruote schiavo è anche circa 35 gradi al largo di
orizzontale, ma in direzione opposta a quella della prima ruota.
In un'altra
incarnazione rientri nelle ruote per ricevere i magneti schiavo schiavo sono
tacche tagliate a ruota schiavo ad intervalli uguali e misurati lungo i bordi
della ruota, a intervalli di 45 gradi essendo preferiti.
In questa
incarnazione "carenatura" dell'invenzione, il complessivo di
azionamento magnetico è costituito da una coppia di cappottature non magnetico
circostante e sostanzialmente allegando a ciascuna delle ruote schiavo. Ogni
coppia di cappottature forma una superficie semi-circolare, avendo un diametro
leggermente superiore al diametro della sua ruota rispettivi slave. La curvatura concava delle cappottature
affronta le ruote di schiavo. Montati sulla superficie convessa delle
cappottature sono una pluralità di magneti permanenti in auto. I magneti in auto sono montati in modo che essi presentano
per i magneti di schiavo il palo stesso come i magneti schiavo presenti i
magneti in auto; cioè, come facce come: Nord-a-nord o sud--sud. Ruotano le cappottature né loro magneti in
auto.
Nelle varie
incarnazioni, il divario tra i magneti del disco e i magneti schiavo è
regolabile..
BREVE DESCRIZIONE DEI
DISEGNI
Ulteriori
caratteristiche e vantaggi dell'invenzione sarà evidente dalla seguente
descrizione dettagliata in combinato disposto con i disegni di accompagnamento,
dove:
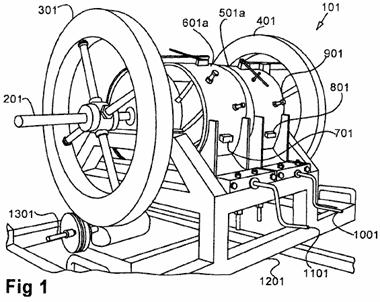
Fig.1 è una vista prospettica dell'incarnazione della
cappottatura del motore magnetico con volani associata.
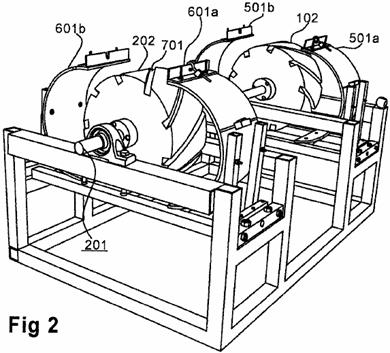
Fig.2 è parzialmente smontata vista prospettica
dell'incarnazione della cappottatura del motore magnetico.
Fig.3 è un diagramma del collocamento magnete sulla
cappottatura.
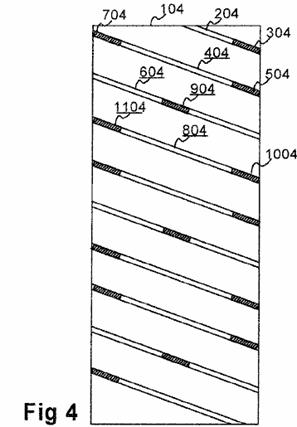
Fig.4 è un diagramma schematico della ruota di uno schiavo
dell'incarnazione di cappottature indicante la posizione dei magneti permanenti.
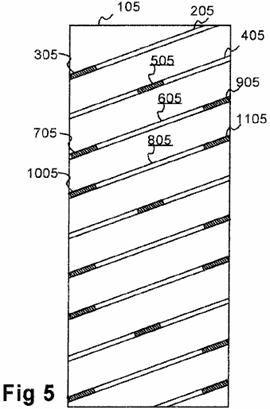
Fig.5 è un diagramma schematico di un'altra ruota schiavo
dell'incarnazione di cappottature indicante la posizione dei magneti permanenti.
DESCRIZIONE DETTAGLIATA
DELL'INVENZIONE
Nelle varie
incarnazioni dell'invenzione c'è generalmente fornito un complessivo di
azionamento magnetico e un montaggio magnetico schiavo, con un campo magnetico
complessivo di azionamento all'assembly schiavo di accoppiamento tale che
quando il complessivo di azionamento ruota si provoca l'Assemblea di schiavo
ruotare. L'accoppiamento è interamente magnetico, dove senza catene,
ingranaggi, pulegge, dischi worm o altri attacchi fisici sono necessari.
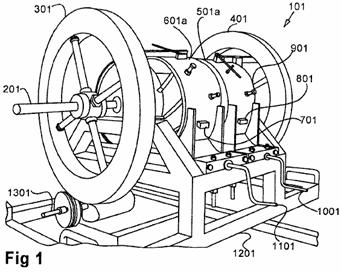
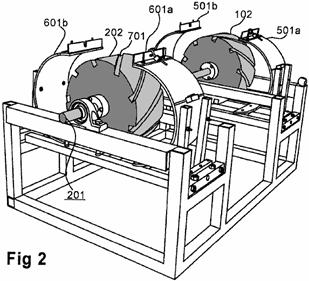
Fig.1 e Fig.2
mostrano una prima incarnazione dell'invenzione, indicato qui come
l'incarnazione di "carenatura". In questa incarnazione dell'assembly schiavo
magnetico del motore magnetico 101
comprende due ruote solido schiavo amagnetico 102 e 202, più
chiaramente visibile in Fig.2. Le ruote schiavo sono montate su un albero di
schiavo 201. Fig.1 Mostra un'incarnazione in cui
volani opzionale 301, 401 sono
montati sull'albero schiavo 201. I volani possono essere montate
convenientemente o in prossimità dell'estremità dell'albero schiavo. Un dispositivo 1301 per la generazione di corrente elettrica è condizione che è
direttamente accoppiato all'albero schiavo, o indirettamente accoppiato
attraverso un volano, come mostrato in Fig.1,
o anche se qualche altro elemento dell'assemblea magnetica schiavo.
Fatta eccezione
per gli elementi indicati nel presente documento, l'invenzione è costruito con
un materiale non magnetico. Pheotic
materiali di plastica o ceramica sono attualmente preferito per le ruote di
schiavo e guidano le ruote, ma una vasta gamma di materiali non-magnetici è
accettabile finché il materiale non creare o aggravare le correnti parassite. Il diametro delle ruote schiavo attualmente
operativi modelli è di circa 10 pollici (250 mm) e la larghezza di circa 5
pollici (125 mm). Le dimensioni ottimale
delle ruote schiavo saranno determinate dall'applicazione specifica
dell'invenzione.
Come si vede
nella Fig.2, ogni ruota schiavo ha
una pluralità di scanalature in esecuzione da un lato a altro. Una tale scanalatura è designato 701. Le scanalature in una ruota sono orientate con
un angolo di circa 35 gradi a bordo ruota schiavo, mentre le scanalature della
seconda ruota sono orientate a circa 35 gradi al bordo opposto, come si può
vedere chiaramente nella Fig.2.
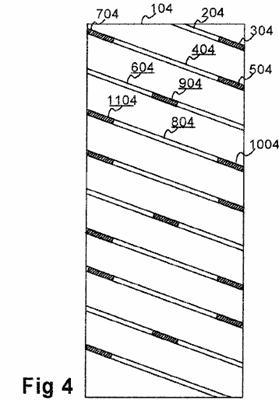
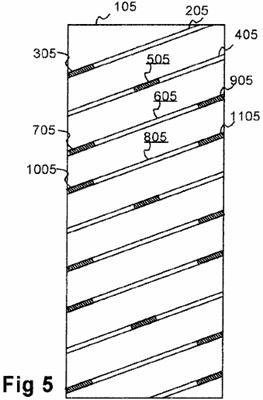
Fig.4 e Fig.5 dimostrano l'orientamento delle
scanalature e il posizionamento dei magneti schiavo. I rettangoli, 104 e 105 rappresentano
le superfici delle ruote schiavo, come se essi erano disposte di piatto. Le scanalature in pendio 104 di ruota schiavo verso il basso da sinistra a destra con un
angolo di circa 35 gradi sull'orizzontale. Le scanalature in pendio 501 di ruota schiavo verso l'alto da sinistra a destra con un
angolo di circa 35 gradi sull'orizzontale. Fig.4,
solchi 204, 404, 604 e 804 sono rappresentativi delle scanalature
nella ruota di uno schiavo. Scanalature 205, 405, 605 e 805 della ruota schiavo rappresentato in Fig.5 sono rappresentativi delle scanalature nell'altra ruota di
schiavo.
Magneti schiavo sono montati nelle scanalature. Fig.4,
rappresentante schiavo magneti sono 304,
504, 704, 904, 1004 e 1104. La posizione dei magneti schiavo preferita è
che due scanalature adiacenti hanno magneti posizionati alle estremità come con
304, 504 e 704 in scanalature 204 e
404. Il solco successivo 604 ha un magnete singolo schiavo 904 posizionato centralmente. Questo schema di due scanalature con magneti
di fine e il terzo con un magnete centrale si ripete. L'incarnazione preferito ha un totale di 9
scanalature e 15 schiavo magneti per ruota schiavo. Fig.5
mostra che lo stesso modello è utilizzato nella seconda ruota schiavo, per
esempio nel modo in cui schiavo magneti 305,
505, 706, 905, 1005 e 1105 sono
posizionati nelle scanalature 205, 405, 605 e 805.
In incarnazione
preferito, il polo nord di ciascun magnete schiavo si affaccia verso l'esterno
dal solco; Tuttavia, avendo il polo sud verso l'esterno produce risultati
altrettanto soddisfacenti. I magneti possono essere incollati
in posizione o altrimenti saldamente fissati in modo che non spostare. L'attraente forze questi magneti
prodotti fronte polacchi sono autorizzate a fare contatto magnetico richiede
circa 1200 ft. lbs a superare. Schiavo e
auto magneti sono magneti permanenti e hanno il palo stesso verso l'esterno,
generando forze repulsive su prescrizione di un misurato gauss 38.
Il complessivo
di azionamento magnetico dell'incarnazione "carenatura" comprende
appaiati conchiglia cappottature 601a,
601b e 501a, 501b, migliore
visto in Fig.2, che mostra le
cappottature in una posizione aperta, esponendo le ruote di schiavo. Fig.1 illustra le cappottature in
posizione chiusa, in cui opera l'invenzione. Manovella
maniglie 1001, 1101 operano
verme-unità a fornire per aprire e chiudere le cappottature per regolare il
divario tra le cappottature e le ruote di schiavo e, quindi, il divario tra i
magneti del disco e i magneti di schiavo.
Fig.1 mstra anche magneti auto 701, 801 posizionato sulla superficie esterna delle cappottature 501a e 601a rispettivamente. Una
pluralità di bulloni di ferro-magnetico 901
penetrare la cappottatura conchiglia attraverso fori filettati. Questi bulloni modificare il campo magnetico
ed eliminare i punti morti. L'immissione
dei magneti in auto e bulloni è discusso sotto.
Da Fig.1 si vede che la curvatura
combinata delle cappottature conchiglia appaiati risultati in loro quasi che
circonda la loro ruota rispettivi slave quando è in posizione chiusa. Cioè, ogni membro di una coppia di
cappottatura circonda un po' meno di 180 gradi della circonferenza di ruota
schiavo affinché quando giustapposti in posizione chiusa, insieme circondano
quasi a 360 gradi della circonferenza ruota schiavo.
Fig.3A e Fig.3B rappresentano
un modello per i magneti di schiavo di montaggio sulla superficie esterna, o
convessa, di una coppia di cappottature. La figura rappresenta le cappottature-metà 103, 703, come se essi sono state poste
piatta. Linee guida sono forniti nella
figura per indicare le linee longitudinali di Eliminammo 403 e linee orizzontali 503
dividendo ogni cappottatura in ottavi.
Per quanto
riguarda la cappottatura-metà mostrata in Fig.3A,
due magneti permanenti in auto, 203, 303
sono incollati alla superficie esterna della cappottatura sulla linea 403 bisettrice la cappottatura
longitudinalmente. Un magnete di azionamento 203 è collocato circa un ottavo del modo da un'estremità. Il secondo magnete di azionamento 303 è posto tre ottave del modo dalla
parte opposta. Bulloni ferro-magnetico 603 sono inseriti nella cappottatura
attraverso fori filettati. Lo scopo dei bulloni è di modificare il campo
magnetico per eliminare i punti morti.
Per quanto
riguarda la cappottatura-metà mostrato in Fig.3B,
magnete di azionamento 803 è posto
tre ottave del modo da un'estremità e magnete di azionamento 903 è collocato un ottavo (un sedicesimo?) del modo in cui l'altra estremità. Ancora una volta, bulloni ferro-magnetico 603 sono forniti per eliminare i punti
morti del campo magnetico.
Il diametro
attraverso ogni ruota schiavo è di circa 10 pollici (250 mm). Misurata dal fondo del solco 404 il diametro è di 9 pollici (225
mm). Di conseguenza, la lunghezza
dell'arco dalla parte inferiore di una scanalatura sul fondo di una scanalatura
adiacente è Pi pollici (cioè 3,14 pollici o 80 mm).
I magneti in
auto sono incollati o altrimenti fissati saldamente alle superfici esterne o
concave delle cappottature. Supponendo che i magneti schiavo aver montati nelle
scanalature delle ruote schiavo con il Polo Nord rivolto verso l'esterno, il
polo nord di ciascun magnete di azionamento è fissato contro la superficie del
cofano così che come poli faccia un altro. Come le cappottature sono spostati verso le
ruote schiavo ruotando le pedivelle 1101,
1001 i magneti auto respingono i magneti schiavo, causando le ruote schiavo
ruotare.
Regolazione
della spaziatura tra le cappottature e le ruote di schiavo mediante manovelle 1101, 1001 regola la forza
dell'interazione dei campi dei magneti del disco e magneti schiavo e, quindi,
la coppia sulle ruote schiavo.
Come mostrato
in Fig.1, volani 301, 401 facoltativamente può essere
montato sull'albero schiavo. La
posizione preferita è presso o vicino all'estremità dell'albero.
Schiavo albero 201
giri così come risultato la forza magnetica dalle cappottature applicati alle
ruote di schiavo. Questo albero può essere accoppiato ad un'uscita
come l'armatura di un generatore di 1301,
direttamente o tramite un volano, come mostrato. In
alternativa, il motore magnetico potrebbe stessa auto una pompa idraulica di
una trasmissione, riducendo così i numeri componenti di trasmissione e la
complessità generale delle trasmissioni. Molte applicazioni differenti per questo
motore diventano evidenti una volta che esso viene realizzato utilizzando unità
permanente molto forte potenza utile magneti può essere generata.
È possibile
variare le dimensioni delle ruote schiavo. Attualmente, il preferito di diametro è di
circa 10 centimetri e una larghezza di 5 pollici. Il motore può funzionare con l'albero di
schiavo 201 verticale o orizzontale.
Mentre l'alluminio è un materiale adatto
per il motore, l'uso di una plastica dura o materiali ceramici inoltre sono
stati usati con successo. Pheotic
plastica è attualmente preferito.
Utilizzando due
ruote schiavo piuttosto che solo uno, eventuali punti morti in una ruota sarà
compensati dall'altra ruota. Il limite
superiore o il numero di ruote di schiavo non è ancora noto. Il limite inferiore è uno.
Il Motore
a Magnete Permanente di Harold Miller e Andrew Colson
Un motore a
magneti permanenti molto grande, molto pesante e piuttosto costoso può essere
visto in queste posizioni di funzionamento:
https://www.youtube.com/watch?v=Q2JTwbIpf6o
https://www.youtube.com/watch?v=WWggsnpEk_s
https://patents.google.com/patent/US8487484B1/en
Si tratta di un motore potente, autoadescanti
e ha un forum di sviluppo qui:
http://www.energeticforum.com/renewable-energy/20583-miller-colson-magnetic-motor.html

Si tratta di un
design alternativo e in teoria, movimento scambiantesi è non così efficace come
un sistema puramente rotazionale come il Charles Flynn o i disegni di Robert
Adams. Tuttavia, ecco un estratto dal brevetto:
Brevetto
Magnete Permanente Unità
Apparato e Metodo Operativo
Riepilogo:
Un apparato di
azionamento magnetico comprende primo e secondo i vettori di magnete che
trasportano in primo luogo e secondo modalità di magnete permanente. Un vettore
intermedio magnete posizionato tra i vettori di primo e secondo magnete
trasporta un terzo accordo di magnete permanente. I vettori di magnete sono
disposti per rotazione uno rispetto a altro tale che il regime di magnete
producono interazioni magnetiche quale risultato in colpo di potere le forze
che causano i vettori di magnete subire relativo reciproco in direzioni prima e
la seconda corsa durante le porzioni di zona di
Descrizione:
BACKGROUND DELL'INVENZIONE
1. Campo dell'invenzione
La
presente invenzione si riferisce a trasmissioni meccaniche che convertire inpue
forze o coppie (applicate a un'unità di input) in uscita forze o coppie
(consegnato a un'uscita dell'inverter). L'invenzione riguarda più in
particolare, sistemi di azionamento alternativi che eseguono la conversione di
forza o coppia a titolo di campo magnetico interazioni tra magneti permanenti.
2. Descrizione Della Tecnica
A
titolo di sfondo, ci sono numerosi brevetti, domande di brevetto pubblicate e
altra letteratura proponendo l'uso di magneti permanenti per azionare
dispositivi di azionamento alternativi, quali convertitori di movimento,
trasmettitori di
Ancora
nessuno, a quanto pare, ha avvicinato costruzione unità di magnete permanente
dal punto di vista di un designer di motore avendo in mente principi di
funzionamento
RIEPILOGO
Un
anticipo nell'arte è fornito da un apparato di azionamento magnetico avere una
composizione di romanzo magnete che è particolarmente adatta per compressori
alternativi di funzionamento. In un'incarnazione, l'apparato di azionamento
magnetico comprende primo e secondo vettori di magnete che trasportano in primo
luogo e secondo modalità di magnete permanente. Un vettore intermedio magnete è
posizionato tra i vettori di primo e secondo magnete e trasporta un terzo
accordo di magnete permanente. Il vettore intermedio magnete e i vettori di
primo e secondo magnete sono disposte per rotazione uno rispetto a altro
(rotazione relativa). Durante tale rotazione relativa, il regime di magnete
producono interazioni magnetiche che si traducono in forze di colpo di potere.
Le forze di colpo di potere causano il vettore intermedio magnete e i vettori
di primo e secondo magnete di sottoporsi a reciproco uno rispetto a altro
(relativo reciproco) in direzioni prima e la seconda corsa durante le porzioni
di zona di
In
un'incarnazione dell'apparato di azionamento magnetico, una zona di transizione
esiste ogni transizione fra una delle zone morte e una delle zone di
In
un'incarnazione dell'apparato a trascinamento magnetico, la prima disposizione
di magneti permanenti, il secondo accordo di magnete permanente e la terza
disposizione di magneti permanenti comprendono una serie di magneti disposti in
un reticolo di magnete. I magneti sono orientati sul loro elementi portanti
rispettivi magnete per presentare un primo polo magnetico su un lato
In
un'incarnazione dell'apparato di azionamento magnetico, il primo vettore di
magnete ha un lato interno rivolto verso un primo lato
In
un'incarnazione dell'apparato di convertitore di coppia di azionamento
magnetico, un dispositivo di sincronizzazione viene utilizzato per
sincronizzare l'albero principale per quanto riguarda la sua rotazione e
reciproco posizioni affinché le zone morte coincidano con l'albero principale,
vicino alle prime posizioni di punto morto morto e inferiore. Ad esempio,
l'albero principale può essere sincronizzato affinché le zone morte sono
incentrate sulle prime posizioni di punto morto morto e inferiore. In
alternativa, l'albero principale può essere sincronizzato in modo che le zone
morte sono dinamicamente regolate in posizione o le dimensioni.
In
un'incarnazione dell'apparato di convertitore di coppia di azionamento
magnetico,
In
un'incarnazione dell'apparato di convertitore di coppia di azionamento
magnetico, il componente input può includere un motore rotativo e il componente
di uscita può includere un albero motore collegato all'albero principale da una
In
un altro aspetto della materia divulgata, un apparato di azionamento magnetico
è compreso come un apparato di vettore di due-magnete invece di un apparato di
vettore di tre-magnete. L'apparato di due magneti vettore comprende avversarie
prima e secondo vettori magnete invece
In
un altro aspetto della materia divulgata, un insieme di apparecchi plurale
azionamento magnetico può essere alimentato da uno o più componenti di input a
guidare un componente singola uscita. Ogni apparato plurale azionamento
magnetico può comprendere due o più apparecchi di unità tre-magnete vettore,
due o più due-magnete vettore unità apparati o qualsiasi combinazione di uno o
più apparecchi di vettore di tre-magnete e uno o più apparecchi di vettore di
due-magnete desiderata.
In
un altro aspetto della materia divulgata, viene fornito un metodo di
azionamento magnetico. In un'incarnazione di esempio
In
un altro aspetto della materia divulgata, un apparato di azionamento magnetico
ha opposti vettori magnete rispettivamente portando avversaria magnete accordi.
Il regime di magnete avversaria hanno opposti poli magnetici e sono configurato
per produrre interazioni magnetiche quando i vettori di magnete avversaria
subiscono la rotazione relativa. Le interazioni magnetiche producono forze di
colpo di alimentazione che causano i vettori di magnete avversaria a subire
relativo reciproco in direzioni prima e la seconda corsa durante le porzioni di
zona di
BREVE DESCRIZIONE DEI DISEGNI
Le
suddette ed altre caratteristiche e vantaggi risulterà dal seguente descrizione
più particolare delle incarnazioni di esempio, come illustrato nei disegni
d'accompagnamento, in cui:
Fig.1
è una vista di prospettiva schematica mostra un esempio tre-magnete apparecchio
di azionamento magnetico di vettore in una prima posizione operativa;

Fig.2
è una vista di prospettiva schematica mostra l'apparato di azionamento
magnetico di FIG.1 in una seconda posizione operativa;
Fig.3
è una vista di prospettiva schematica mostra l'apparato di azionamento
magnetico di FIG.1 in una terza posizione operativa;
Fig.4
è una vista di prospettiva schematica mostra l'apparato di azionamento
magnetico di FIG.1 in quarta posizione operativa;
Fig.5
è un diagramma di temporizzazione un timing di esempio dell'apparato di
azionamento magnetico di FIG.1;
Fig.6A-Fig.6H
sono ulteriori diagrammi di temporizzazione mostrando una temporizzazione di
esempio dell'apparato di azionamento magnetico di FIG.1;
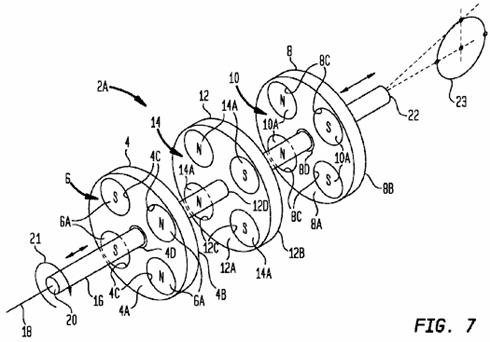
Fig.7
è una vista prospettica mostrando una costruzione esempio dell'apparato di
azionamento magnetico di FIG.1 in combinazione con un modulo d'ingresso e
un'uscita component per fornire un apparato di convertitore di coppia di
azionamento magnetico;
Fig.8
è una vista prospettica mostrando un altro esempio costruzione dell'apparato di
azionamento magnetico di FIG.1 in combinazione con un modulo d'ingresso e
un'uscita component per fornire un apparato di convertitore di coppia di
azionamento magnetico;
Fig.9
è una vista di pianta superiore mostrando la costruzione di apparecchi a
trascinamento magnetico di esempio di FIG.8;

Fig.10A
è una vista di sezione trasversale presa lungo linea 10A-10A in FIG.9;
FIG.10B
è una vista di sezione trasversale presa lungo linea 10B-10B in FIG.9;
FIG.10C
è una vista di sezione trasversale presa lungo linea 10C-10C in FIG.9;
FIG.10D
è una vista di sezione trasversale presa lungo linea 10D-10D in FIG.9;
FIG.10E
è una vista di sezione trasversale presa lungo linea 10E-10E in FIG.9;
FIG.10F
è una vista di sezione trasversale presa lungo linea 10E-10F in FIG.9;
Fig.11
è una vista di sezione trasversale di vista/parziale parziale laterale della
costruzione esempio azionamento magnetico apparato di FIG.8, con la sezione
trasversale presa lungo linea 11-11 in FIG.9;
Figg.
12A e 12B sono viste in prospettiva allargata mostrando una componente di
accoppiamento di uscita nella costruzione di apparecchi di azionamento
magnetico esempio di FIG.8;


Figg.
13A - 13H sono prospettiva vista mostrando il primo, vettori di seconda e
intermedi magnete dell'esempio magnetico guidare apparecchi, fabbricazione di
FIG.8, con i vettori di primi e seconda magnetici fissati contro rotazione e
reciproco e il vettore intermedio magnete viene mostrato in vari rotazionale e
posizioni di reciproco;
Fig.14
è una vista prospettica mostrando una modifica della costruzione esempio
azionamento magnetico apparato di FIG.8, in cui la posizione degli elementi
portanti della prima e seconda magnete può essere regolata;
Fig.15
è una vista di prospettiva schematica mostra un esempio due-magnete costruzione
di apparecchi a trascinamento magnetico vettore in una prima posizione
operativa;
Fig.16
è una vista di prospettiva schematica mostra la costruzione di apparecchi a
trascinamento magnetico di FIG.15 in una seconda posizione operativa;

Fig.17
è una vista di prospettiva schematica mostra la costruzione di apparecchi a
trascinamento magnetico di FIG.15 in una terza posizione operativa;
Fig.18
è una vista di prospettiva schematica mostra la costruzione di apparecchi a
trascinamento magnetico di FIG.15 in una quarta posizione operativa;
Fig.19
è una vista prospettica mostrando un'esempio azionamento magnetico apparato
costruzione con più insiemi di vettori di magnete guida un componente comune di
uscita; e
Fig.20
è una vista prospettica mostrando un altro esempio azionamento magnetico
apparato costruzione con più insiemi di vettori di magnete guida un comune
componente di uscita.
DESCRIZIONE DETTAGLIATA DELL'INCARNAZIONE DI ESEMPIO
Passando
ora ai disegni, che non sono necessariamente a scala, come riferimento numeri
verranno utilizzati per rappresentare come elementi in tutte le diverse
visualizzazioni. Come sarà descritto di seguito in relazione varie incarnazioni
alternativi, un apparato di azionamento magnetico come sopracitati può essere
utilizzato per convertire un rotativo input ricevuto da una fonte di
alimentazione in ingresso ad un output alternativo che può essere utilizzato
per pilotare un carico. L'input rotativo può essere continuo o intermittente,
unidirezionale o bidirezionale. L'output alternativo può comprendere un ciclo
di ripetizione dei colpi reciproci. L'apparecchio di azionamento magnetico
utilizza accordi di magnete permanente che sono ciascuno configurati in un
modello scelto per il magnete per creare interazioni magnetiche come il regime
di magnete vengono ruotato uno rispetto a altro della fonte di alimentazione in
ingresso. Queste interazioni magnetiche offrono
Passando
ora alla Fig.1 a Fig.4, vista schematica di un apparato di azionamento
magnetico di vettore di tre-magnete di esempio 2 è mostrata al fine di
illustrare i principi generali di funzionamento della materia in oggetto
descritte nel presente documento. Nell'incarnazione illustrato, l'estremità
sinistra dell'apparato di azionamento magnetico 2 ha un primo elemento portante
di magnete 4 portando una prima sistemazione di magnete permanente 6 con un set
di magneti permanenti 6A. L'estremità destra dell'apparato di azionamento
magnetico 2 ha un secondo magnete vettore 8 che trasportano un secondo accordo
di magnete permanente 10 con una serie di magneti permanenti 10A. Un vettore
intermedio magnete 12 è collocato tra i vettori di primo e secondo magnete e
trasporta un terzo accordo di magnete permanente 14 con un set di magneti
permanenti 14A.
I
vettori di magnete 4, 8 e 12 hanno rispettivi lati prima e la seconda 4A/4B,
8A/8B e 12A/12B che definiscono una dimensione di spessore elemento portante di
magnete. Anche se i vettori di magnete 4, 8 e 12 sono mostrati come essendo a
forma di disco, potrebbero essere utilizzati anche altre configurazioni di
vettore del magnete (ad es., poligonale, stella a forma di, ecc). I vettori di
magnete 4, 8 e 12 possono essere fabbricati utilizzando qualsiasi metallo
adatto o materiale non metallico di rigidità e resistenza sufficiente per
gestire le forze magnetiche, inclusi ma non limitati a alluminio, titanio,
acciaio inox, polimeri, compositi fibrorinforzati, ecc. Nel caso dei metalli, è
preferibile che il materiale sia sostanzialmente non magnetico (ad esempio
alluminio o titanio) o solo leggermente magnetico (come l'acciaio inox).
Materiali che sono più magnetici (ad esempio acciaio al carbonio) possono anche
essere utilizzati purché resta inteso che questi materiali possono influenzare
i campi magnetici dei magneti 6A, 10A e 14A.
I
magneti 6A, 10A e 14A sono illustrati come dischi magnetici che sono
magnetizzati assialmente in modo da avere una polarità magnetica nord sulla
faccia di un magnete e una polarità sud magnetica sulla faccia opposta
I
vettori di magnete 4, 8 e 12 possono portare loro rispettivi magneti 6A, 10A e
14A in qualsiasi maniera adeguata. Ad esempio, ogni vettore di magnete 4, 8 e
12 può formata con magnete-trasportare ritagli di forma e dimensioni adatte. Se
i magneti sono a forma di disco come mostrato in Figg.1-4, il vettore di
magnete 4 può essere costituito con quattro circolare cut-out 4C che ricevono
il 6A quattro magneti. Allo stesso modo, può essere costituito il vettore
magnetico 8 con quattro circolare cut-out 8C che ricevono quattro magneti 10A e
il vettore di magnete 12 può essere costituito con quattro aperture circolari
12C che ricevono quattro magneti 14A. Se lo si desidera, lo spessore della 6A
magneti, 10A e 14A da un magnete faccia a altro può essere selezionati in base
allo spessore dei vettori magnete 4, 8 e 12. In alternativa, i magneti 6A, 10A
e 14A potrebbe essere più spessi o più sottili rispetto alla quota di spessore
dei loro vettori rispettivi magnete 4, 8 e 12. Qualsiasi tecnica di
conservazione
La
prima disposizione di magnete permanente 6, il secondo accordo di magnete
permanente 10 e la terza disposizione di magneti permanenti 14 sono configurati
per produrre cambiando interazioni magnetiche quando un ingresso rotativo (non
mostrato in Figg.1-4) comunica la rotazione relativa tra il vettore intermedio
magnete 12 e i vettori di primo e secondo magnete 4 e 8. Figg.1-4, la rotazione
relativa tra il vettore intermedio magnete 12 e i vettori di primo e secondo
magnete 4 e 8 è rappresentata da frecce "A", "B" e
"C". In Fig.1, il vettore intermedio magnete 12 e i vettori di primo
e secondo magnete 4 e 8 sono mostrati in una posizione di rotazione relativa
prima. In Fig.2, il vettore intermedio magnete 12 e i vettori di primo e
secondo magnete 4 e 8 sono mostrati in una posizione di rotazione secondo
relativa dopo 180° di rotazione relativa tra il vettore intermedio magnete 12 e
i vettori di primo e secondo magnete 4 e 8. Fig.3 e Fig.4 Visualizza posizioni
di rotazione relativi che sono a metà strada tra le posizioni di rotazione
relative di Fig.1 e Fig.2.
Ci
sono vari modi che l'apparato di azionamento magnetico 2 può essere costruito
per facilitare la rotazione relativa tra il vettore intermedio magnete 12 e i vettori
di primo e secondo magnete 4 e 8. Ad esempio, il vettore intermedio magnete 12
potrebbe essere accoppiato a un componente di input e ruotato di per sé, mentre
i vettori di primo e secondo magnete 4 e 8 rimangono fissi contro la rotazione.
Al contrario, i vettori di primo e secondo magnete 4 e 8 potrebbero essere
accoppiati a un componente di input e ruotati insieme mentre il vettore
intermedio magnete 12 rimane fisso contro la rotazione. I vettori di primo e
secondo magnete 4 e 8 neanche potevano ruotare nella stessa direzione o in
direzioni opposte. Un'ulteriore alternativa sarebbe quella di ruotare la
direzione di 12 in un vettore intermedio magnete durante la rotazione i vettori
di primo e secondo magnete 4 e 8 in direzione opposta. Un esempio
Ci
sono anche vari modi che l'apparato di azionamento magnetico 2 può essere
costruita per facilitare il relativo reciproco tra il vettore intermedio
magnete 12 e i vettori di primo e secondo magnete 4 e 8. Ad esempio, il vettore
intermedio magnete 12 potrebbe essere accoppiato a un componente di uscita per
causare reciproco mentre i vettori di primo e secondo magnete 4 e 8 rimangono
fissi contro reciproco. Al contrario, i vettori di primo e secondo magnete 4 e
8 potrebbero entrambi essere accoppiati a un componente di uscita per causare
reciproco mentre il vettore intermedio magnete 12 rimane fissate contro
reciproco.
Un
esempio
Si
noti che qualsiasi vettore di magnete che è adattato a ricambiare per produrre
relativo reciproco tra il vettore intermedio magnete 12 e i vettori di primo e
secondo magnete 4 e 8 può anche essere adattato per ruotare al fine di produrre
la rotazione relativa tra il vettore intermedio magnete e i vettori di primo e
secondo magnete. Allo stesso modo, qualsiasi vettore di magnete che è stato
risolto contro reciproco può essere fissato anche contro la rotazione. Ad
esempio, come descritto più dettagliatamente qui di seguito in relazione le
costruzioni mostrato in Fig.7 e in Figg.8-12B, il vettore intermedio magnete 12
può essere adattato a entrambi ruotare e ricambiare mentre i vettori di primo e
secondo magnete 4 e 8 rimangono fissi contro rotazione e reciproco. Al
contrario, i vettori di primo e secondo magnete 4 e 8 potrebbero essere
adattati per ruotare sia ricambiare mentre il vettore intermedio magnete 12
rimane fisso contro rotazione e reciproco. Come ulteriore alternativa,
qualsiasi vettore di magnete che è adattato per ricambiare può essere fissato
contro rotazione e viceversa. Ad esempio, il vettore intermedio magnete 12
potrebbe essere adattato per ricambiare ma non ruotare mentre i vettori di
primo e secondo magnete 4 e 8 sono adattati a ruotare ma non ricambiare. Al
contrario, i vettori di primo e secondo magnete 4 e 8 potrebbero essere
adattati per ricambiare ma non ruotare mentre il vettore intermedio magnete 12
è adattato a ruotare ma non ricambiare.
Nell'incarnazione
di Figg.1-4, il numero di magneti 6A, 10A e 14A in ogni rispettivo magnete
permanente disposizione 6, 10 e 14 è di quattro. I magneti 6A, 10A e 14A sono ugualmente
distanziati gli uni dagli altri e sono disposti simmetricamente sui centri dei
loro vettori rispettivi magnete 4, 8 e 12 in una quadrilatero poligonale
(corrispondente al numero di magneti) che è quadrato ed equilibrato. Ogni
magnete
In
ognuna delle Figg.1-4, il secondo lato 4B del primo vettore magnete 4 affronta
il primo lato 12A del vettore intermedio magnete 12 per formare una prima zona
di interazione magnetica 15A. Il primo 8A lato
Le
forze di colpo di potere producono relativo reciproco tra i vettori di magnete
4, 8 e 12 in un primo senso quando i poli magnetici opposti della prima zona di
interazione magnetica 15A tutti reciprocamente respingono a vicenda mentre
opposti poli magnetici della seconda area di interazione magnetica 15B tutti
reciprocamente si attraggono. Al contrario, le forze di colpo di potere
producono relativo reciproco tra i vettori di magnete 4, 8 e 12 in un secondo
senso quando i poli magnetici opposti della prima zona di interazione magnetica
15A tutti reciprocamente attraggono reciprocamente mentre opposti poli
magnetici della seconda area di interazione magnetica 15B tutti reciprocamente
si respingono.
I
vettori di magnete 4, 8 e 12 possono dire di essere in porzioni "zona di
Fig.2
illustra l'apparato di azionamento magnetico 2 al centro di una seconda zona di
potere in cui le interazioni magnetiche producono forze di colpo di potere in
un secondo senso. Come notato sopra, questo stato segue 180° di rotazione
relativa (dalla posizione indicata in Fig.1) tra il vettore intermedio magnete
12 e i vettori di primo e secondo magnete 4 e 8. Il vettore intermedio magnete
12 e il primo vettore di magnete 4 sono tirati insieme a causa di ogni polo
magnetico lato 12A del vettore intermedio magnete reciprocamente coassialmente
essendo allineato con un'avversario polo magnetico di polarità opposta sul lato
4B del primo vettore magnete. Questa forza di trazione è rappresentata dalle
frecce "E". Come si può vedere, i vettori di magnete 4 e 12 disposte
posizionati in modo che ci sono due interazioni N-S e due S-N interazioni nella
zona di interazione magnetica 15A. Allo stesso tempo, il vettore intermedio
magnete 12 e il secondo vettore di magnete 8 sono spinti diverso dovuto ogni
polo magnetico lato 12B
Si
deve osservare che le zone di potere estendano oltre le posizioni di
allineamento coassiale dei poli magnetici mostrati in Fig.1 e Fig.2, in modo
che ogni zona di
Regime
di magnete, 6, 10 e 14 possono essere detto di essere in porzioni "zona
morta" di loro rotazione relativa quando esistono sostanzialmente che
nessun colpo di potere delle forze che agiscono sugli elementi portanti magnete
4, 8 e 12. Negli arrangiamenti quattro-magnete 6, 10 e 14 di Figg.1-4, c'è una
ben definita zona morta centrata tra ogni zona di
Il
centro della zona morta, Fig.3 corrisponde a 90° di rotazione relativa vettore
di magnete dalla posizione di rotazione zona alimentazione di Fig.1. Il centro
della zona morta, Fig.4 corrisponde a 90° di rotazione relativa vettore di
magnete dalla posizione
In
un'implementazione del prototipo dell'apparato di azionamento magnetico 2, che
è stata costruita secondo Fig.8 a Fig.12B (discusso in dettaglio più avanti), i
quattro magneti 6A, 10A e 14A ogni magnete rispettivo vettore 4, 8 e 12 sono
state attuate con diametro di 3 pollici, 1 pollice di spessore, grado N52
neodimio disco magneti da K & J Magnetics, Inc (un pollice = 25,4 mm). Ogni
magnete 6A, 10A e 14A è stato magnetizzato assialmente ed è stato valutato dal
produttore e produrre una forza di opposizione massimo di circa 360 chili. I
magneti 6A, 10A e 14A erano disposti su loro elementi portanti rispettivi
magnete 4, 8 e 12 affinché i centri di magnete erano 2,75 pollici dai centri di
vettore
La
rotazione relativa e relativo reciproco tra il vettore intermedio magnete 12 e
il primo e il secondo magnete vettori 4 e 8 possono essere sincronizzati in
modo che le zone morte e le zone di potenza a determinate parti di reciproco relativo
vettore di magnete. Fig.1. mostra una zona di potere che ruota prossima il
punto centrale di un primo colpo di
Fig.5
viene illustrato un disco di temporizzazione che rappresenta un altro modo per
visualizzare la sincronizzazione mostrata in figg.1-4. In questa illustrazione, sia la rotazione
relativa
Come
dichiarato, Fig.5 Mostra uno schema di sincronizzazione in cui, per ogni grado
di rotazione di vettore relativo magnete, c'è un grado di reciproco supporto
relativo magnete. Nella posizione 0° contrassegnato "TDC", i vettori
di magnete 4, 8 e 12 sono in posizione di relativa reciproco di punto morto
superiore e rotazionale sono posizionati al centro di una zona morta prima. A
circa 45° di rotazione/reciproco relativa dei vettori magnete 4, 8 e 12, viene
raggiunta la fine della prima zona morta e la transizione di vettori di magnete
in una prima zona di potenza che produce colpo di potere delle forze in una
prima direzione. Il centro di questa zona di
Come
notato sopra, inizio e fine posizioni delle zone di
Come
descritto di seguito in relazione alla costruzione di esempio illustrata nella
Figg.8-12B, la sincronizzazione indicata in Figg.1-5 può essere stabilita e
mantenuta da un sistema di feedback che controlla il relativo reciproco tra i
vettori di magnete 4, 8 e 12 e utilizza queste informazioni per controllare la
rotazione relativa dei vettori magnete. In alternativa, un sistema di
cronometraggio meccanico potrebbe essere fornito in cui la rotazione relativa e
relativo reciproco tra i vettori di magnete 4, 8 e 12 sono sincronizzati
utilizzando una disposizione di accoppiamento meccanico. Se lo si desidera, la
sincronizzazione può essere regolata in modo che la rotazione relativa
Figg.6A-6H
presenta visualizzazioni aggiuntive
Come
una guida interpretativa, la parte sinistra di Figg.6A-6H è una vista guardando
dal secondo lato 4B
Fig.6A
Mostra i vettori di magnete 4, 8 e 12 in una posizione di relativa
rotazione/reciproco di 0°. In questa posizione, le interazioni magnetiche della
prima zona di interazione magnetica 15A sono S-N, S-S, N-S e N-N. Le
interazioni magnetiche della seconda area di interazione magnetica 15B sono
N-N, N-S, S-S e S-N. In ogni zona di interazione magnetica 15A e 15B, metà
delle coppie opposte magnete coassialmente sono allineati per reciproca attrazione
e l'altra metà sono allineati in modo coassiale per reciproca repulsione. Così,
Fig.6A raffigura una zona morta che è galoppo alla posizione 0° TDC relativo
reciproco dei vettori magnete 4, 8 e 12. Come si può vedere, la zona morta è
ampio circa 90°.
Fig.6B
Mostra i vettori di magnete 4, 8 e 12 in una posizione di relativa
rotazione/reciproco di 45°. In questa posizione, la rotazione relativa dei
vettori magnete 4, 8 e 12 è a metà strada tra i punti medi di zona morta e
posizioni di rotazione zona di
Fig.6C
Mostra i vettori di magnete 4, 8 e 12 in una posizione di relativa
rotazione/reciproco di 90°. In questa posizione, le interazioni magnetiche
della prima zona di interazione magnetica 15A sono N-N, S-S, S-S e N-N. Tutte
le coppie opposte di magnete in questa zona di interazione magnetica sono
allineate in modo coassiale con come polarità affinché il primo vettore di
magnete 4 e il vettore intermedio magnete 12 si respingono con forza di Spinta
massima. Le interazioni magnetiche della seconda area di interazione magnetica
15B sono S-N, N-S, N-S e S-N. Tutte le coppie opposte di magnete in questa zona
di interazione magnetica sono allineate coassialmente con polarità opposte,
affinché il secondo magnete vettore 8 e il vettore intermedio magnete 12 si
attraggono con forza di trazione massima.
Fig.6C rappresenta pertanto una prima zona di alimentazione che è
galoppo nella posizione di 90° relativo reciproco dei vettori magnete 4, 8 e
12. Come si può vedere, questa zona di
Fig.6D
Mostra i vettori di magnete 4, 8 e 12 in una posizione di relativa
rotazione/reciproco di 135°. In questa posizione, la rotazione relativa dei
vettori magnete 4, 8 e 12 è a metà strada tra i punti medi di zona morta e
posizioni di rotazione zona di
Fig.6E
mostra i vettori magnete 4, 8 e 12 in A / posizione 180° rotazione relativa
reciprocità. In questa posizione, le interazioni magnetiche nella prima zona
15A interazione magnetica sono N-N, N-S, S-S e S-N. Le interazioni magnetiche nella
seconda zona di interazione magnetica 15B sono S-N, S-S, N-S e N-N. In ogni 15A
zona di interazione magnetica e 15B, metà delle coppie di magneti contrapposti
sono coassialmente allineato per attrazione reciproca e l'altra metà è
allineato coassialmente per repulsione reciproca. Così, Fig.6E raffigura una
zona morta che è centrato nella BDC posizione 180° rispetto moto alternativo
dei vettori magnete 4, 8 e 12. Come si può vedere, questa zona morta è largo
circa 90°.
Fig.6F
mostra i vettori magnete 4, 8 e 12 in A / posizione 225° rotazione relativa
reciprocità. In questa posizione, la rotazione relativa dei vettori magnete 4,
8 e 12 è a metà strada tra i punti medi di zona morta e zona di alimentazione
posizioni di rotazione. I vettori magnete 4, 8 e 12 sono quindi in una zona di
transizione in cui le forze magnetiche cambiano dalla condizione
sostanzialmente zero netto di una zona morta per la condizione di piena forza
magnetica di una zona di potenza.
Fig.6G
mostra i vettori magnete 4, 8 e 12 in A / posizione 270° rotazione relativa
reciprocità. In questa posizione, le interazioni magnetiche nella prima zona
15A interazione magnetica sono S-N, N-S, N-S e S-N. Tutte le coppie di magneti
contrapposti in questa zona di interazione magnetica sono coassialmente
allineato con polarità opposte in modo che il primo vettore magnete 4 e il
vettore magnete intermedio 12 si attraggono con la massima forza di trazione.
Le interazioni magnetiche nella seconda zona di interazione magnetica 15B sono
N-N, S-S, S-S e N-N. Tutte le coppie di magneti contrapposti in questa zona di
interazione magnetica sono coassialmente allineato con polarità come in modo
che il secondo vettore magnete 8 e il magnete intermedio portante 12 respingono
reciprocamente con la massima forza di spinta. Fig.6G rappresenta quindi una
zona di
Fig.6H
mostra i vettori magnete 4, 8 e 12 in A / posizione 315° rotazione relativa
reciprocità. In questa posizione, la rotazione relativa dei vettori magnete 4,
8 e 12 è a metà strada tra i punti medi della zona morta e zona di
alimentazione posizioni di rotazione. I vettori magnete 4, 8 e 12 sono quindi
in una zona di transizione in cui le forze magnetiche cambiano dalla condizione
di piena forza magnetica di una zona di alimentazione alla condizione
sostanzialmente zero netto di una zona morta.
Passando
ora alla Fig.7, l'apparecchiatura azionamento magnetico 2 è mostrato in un
esempio 2A costruzione in cui il supporto del magnete intermedia 12 è adattato
per la rotazione e il moto alternativo, mentre le prime e seconde portanti
magnete 4 e 6 sono atte a rimanere fisso contro la rotazione e il movimento
alternativo . Nella magnetica cinematismo costruzione 2A, un albero principale
16 è disposto per estendersi attraverso fori centrali 4D, 8D e 12D che sono
rispettivamente formate nei portatori magnete 4, 8 e 12. L'albero principale 16
è sostanzialmente rettilineo e ha un longitudinale centrale asse 18
sostanzialmente parallelo agli assi longitudinali (e assi campo magnetico) dei
magneti 6A, 10A e 14A.
L'albero
principale 16 è predisposto per la rotazione e il moto alternativo simultaneo.
Una prima porzione di estremità 20 dell'albero principale 16 è adattato per
accoppiamento operativo a un componente di ingresso 21, rappresentato
schematicamente nella Fig.7, che aziona girevolmente l'albero principale. Per
esempio, come descritto in dettaglio più avanti in connessione con Figg.8-12B,
il componente di ingresso 21 può essere fornita da un motore rotativo. Una
seconda porzione di estremità 22 dell'albero 16 è adattato per accoppiamento
operativo a un componente di uscita che è guidato da movimento alternativo
dell'albero principale 18. In Fig.7, un esempio componente rotante di uscita
23, che può essere implementato come un albero motore, viene mostrato
schematicamente. In alternativa, un componente di uscita alternativo, ad
esempio un pistone pneumatico o idraulico, potrebbe essere disposto per essere
guidato da movimento alternativo dell'albero principale 18. L'aggiunta dei
componenti di ingresso e di uscita 21 e 23 al 2A unità magnetica struttura di
apparecchio forma una magnetica guidare apparato convertitore di coppia che
converte una coppia di ingresso applicato dal componente di ingresso ad una
coppia di uscita erogata dal componente di uscita 23.
L'albero
principale 16 è girevolmente accoppiato alla apertura centrale 12D del vettore
magnete intermedio 12, ma è libero di ruotare all'interno del aperture 4D
centrale e 8D del primo e seconde portanti magnete 4 e 8. Le girevolmente
accoppiati vettore magnete intermedio 12 ruota con l'albero principale 16, ma i
vettori primo e il secondo magnete non girevolmente accoppiati 4 e 8 non ruota,
e sarà preferibilmente fissato contro la rotazione. In questo modo, la
rotazione dell'albero principale 16 attorno al suo asse longitudinale 18 dal
componente ingresso 21 produrrà una rotazione relativa tra il vettore
intermedio magnete 12 e il primo e secondo trasportatori magnete 4 e 8.
L'albero principale 16 è anche accoppiato assialmente l'apertura centrale 12D
del vettore magnete intermedio 12, ma è libero di ricambiare attraverso le
aperture centrali 4D e 8D del primo e seconde portanti magnete 4 e 8. il
vettore magnete intermedio accoppiato assialmente 12 muove alternativamente con
l'albero principale 16, ma la mancata -axially accoppiato vettori primo e il
secondo magnete 4 e 8 non ricambierà, e preferibilmente in fisso contro
reciprocità. In questo modo, il movimento alternativo dell'albero principale 16
lungo il suo asse longitudinale 18 produrrà relativa scorrimento relativo tra
il vettore intermedio magnete 12 e il primo e secondo trasportatori magnete 4 e
8 in prima e seconda direzione ictus.
Passando
ora alla Figg.8-12B, l'apparecchiatura azionamento magnetico 2 è mostrato in
una costruzione 2B ulteriore esempio che utilizza il movimento alternativo
convenire albero rotante / main descritto in relazione con l'esempio di
costruzione 2A di Fig.7. Come nel caso di Fig.7, Figg.8-12B raffigurano un
apparato convertitore di coppia a trascinamento magnetico perché la magnetica
costruzione cinematismo 2B è accoppiato a componenti di ingresso e di uscita,
cioè, un motore di ingresso 36 ed un gruppo albero motore 40 (entrambi di che
sono descritte in dettaglio più avanti). Nella magnetica cinematismo
costruzione 2B, il magnete vettore intermedio 12 è di nuovo accoppiata
girevolmente ed assialmente all'albero principale 16 mentre il primo e seconde
portanti magnete 4 e 8 non sono accoppiati all'albero principale in alcun modo.
Come mostrato in Figg.10A-10C, il primo e secondo trasportatori magnete 4 e 8
sono di diametro maggiore
Il
gruppo telaio di supporto 24 è realizzato con una serie di quattro gruppi spool
longitudinali 26 che interconnettono le prime e seconde portanti magnete 4 e 8,
ma non il vettore magnete intermedio 12. Gli assiemi spool 26 montare anche una
serie di piastre stabilizzatrici 28, 30 e 32 che sono orientate sostanzialmente
parallelo ai vettori magnete 4 e 8. Come mostrato in Figg.10A e 10C-10E,
ciascun complesso di rocchetto 26 può includere un 26A un'asta allungata che si
estende attraverso aperture formate nei vettori magnete 4 e 8, corrispondente,
e nelle piastre stabilizzatrici 28, 30 e 32. ogni gruppo rocchetto 26 può
comprendere anche un set di distanziali 26B che montano sulla 26A asta
allungata fra ciascuna coppia di vettori magneti adiacenti e / o piastre
stabilizzatrici per correttamente spazio questi componenti. Come si può vedere
in Figg.8 e 9, ogni gruppo del cassetto 26 è dimostrato di avere quattro
distanziali 26B, uno tra la piastra stabilizzatrice 28 e il primo vettore
magnete 4, la seconda tra il primo vettore magnete 4 e il secondo vettore
magnete 8 , il terzo tra il secondo vettore magnete 8 e la piastra di
stabilizzazione 30, e il quarto tra la piastra stabilizzatrice 30 e la piastra
stabilizzatrice 32. le estremità delle aste allungate 26A sono filettati per
ricevere ritegno 26C che fissano il telaio di supporto 24 insieme. Si comprenderà che altre disposizioni per
distanziare i vari vettori magnete e stabilizzare piastre possono anche essere
utilizzati, quali aste distanziatrici separate collegate tra ogni coppia di
elementi distanziati.
Come
meglio mostrato in Fig.11, la piastra di stabilizzazione 28 è adiacente al
primo vettore magnete 4 e viene utilizzato per supportare l'albero principale
16 in prossimità della sua prima porzione di estremità 20. In particolare, la
stabilizzazione piastra 28 porta un gruppo di accoppiamento di ingresso 34 su
un lato di un 28A un'apertura centrale che alloggia l'albero principale 16.
l'accoppiamento di entrata assemblaggio 34 è configurato internamente per
supportare l'albero principale 16 per basso attrito movimento alternativo
mentre imprimere forze rotazionali ad esso. Il motore 36 è collegato al
complesso di accoppiamento di ingresso 34 per servire come componente rotante,
che ruota l'albero principale 16 durante il funzionamento
Come
meglio mostrato in Figg.8, 9 e 11, ciascun vettore magnete 4, 8 e 12 comprende
una rispettiva coppia di piastre magnete di ritegno 42, 44 e 46 al fine di
garantire il loro rispettivi magneti 6A, 10A e 14A in posizione. Le piastre
magnete fermo 42, 44 e 46 possono essere formati da qualsiasi materiale che non
alterino le interazioni magnetiche tra i magneti 6A, 10A e 14A. Essi possono
essere rispettivamente fissate ai vettori magnete 4, 8 e 12 con qualsiasi
tecnica di montaggio adatta, come ad esempio con viti macchina svasata 48, come
mostrato in Figg.10A, 10B e 10C.
Come
si vede in Fig.11, il foro centrale 12D
Come
si vede in Figg.8, 9 e 11, le piastre di supporto 28 e 32 possono includere
membri 50 per fissare il telaio di supporto 24 ad una superficie di supporto di
montaggio (non mostrato). Il motore di ingresso 36 può altresì includere membri
52 per il fissaggio
Con
riferimento alle continuando Figg.8, 9 e 11, l'albero motore gruppo 40 può
essere configurato con una coppia di piastre di supporto albero motore 68 che
vengono portati dalla piastra stabilizzatrice 32. Le piastre di supporto albero
motore 68 sono provvisti di cuscinetti di banco (non mostrati) che girevolmente
portare un albero motore 70. L'albero motore 70 include una coppia di
contrappeso / manovella organi a braccio 72. Come mostrato in Fig.9, una
porzione centrale di ciascun organo a braccio contrappeso / manovella 72 ha un
estendentesi verso l'esterno perno di banco 73 che è girevolmente montato al
cuscinetto principale di una delle piastre di supporto dell'albero motore 68.
Come inoltre indicato in Fig.9, e anche in Fig.11, il braccio di manovella fine
di ogni contrappeso / manovella elemento a braccio 72 supporta una estremità di
una
L'altra
estremità della
Come
notato in precedenza, in una implementazione prototipo dell'apparecchio
convertitore di coppia a trascinamento magnetico mostrato in Figg.8-12B, i
quattro magneti 6A, 10A e 14A su ciascuna rispettiva portante magnete 4, 8 e 12
sono stati realizzati con diametro di 3 pollici, 1 pollice di spessore, di
grado N52 magneti al neodimio disco da K & J Magnetics, Inc. Ogni magnete
6A, 10A e 14A era assialmente magnetizzato ed è stato valutato dal costruttore
a produrre una spinta massima / pull forza di circa 360 chili. La magneti 6A,
10A e 14A sono stati disposti su rispettivi supporti magnetici 4, 8 e 12 in
modo che i centri magnete erano 2,75 pollici dai centri carrier magnete. La
lunghezza della corsa
L'apparato
convertitore di coppia a trascinamento magnetico mostrato in Figg.8-12B può
essere sincronizzato in qualsiasi modo adatto in modo che la rotazione
dell'albero principale 16 è temporizzato rispetto alla rotazione dell'albero
motore 70 (come guidato dal movimento alternativo dell'albero principale). Come
mostrato in Figg.8 e 9, una sincronizzazione esempio dispositivo 90 può
comprendere un sensore 92 che rileva la posizione dell'albero motore (ad
esempio, un encoder), ed un segnale di porta-circuito di retroazione 94 che
fornisce un segnale di posizione albero motore ad un controllore programmabile
servo 96 (ad esempio, implementato come un dispositivo digitale programmabile)
che controlla il motore di ingresso 36 (tramite un circuito di controllo 97) in
base al segnale di posizione. Uno qualsiasi dei vari sistemi di controllo servo
robotico esistenti possono essere utilizzati per questo scopo. Altri tipi di
dispositivo di sincronizzazione potrebbero anche essere utilizzati per
sincronizzare il funzionamento
Il
concetto di sincronizzazione di un apparecchio di azionamento magnetico come
descritto qui è stato discusso sopra. Nell'apparecchiatura convertitore di
coppia azionamento magnetico della Figg.8-12B, servo controller 96 è
programmato per controllare la posizione di rotazione
Figg.13A-13H
illustrano le posizioni di rotazione e di pendolamento
Fig.13A
mostra il vettore magnete intermedia 12 nella posizione alternativo 0° TDC e
nel mezzo di una prima zona morta. Fig.13B mostra la posizione di 45° movimento
alternativo del supporto del magnete intermedia 12 in cui il vettore magnete
intermedio è la transizione dalla prima zona morta e in una prima zona di
alimentazione. Fig.13C mostra la posizione di movimento alternativo 90°
Fig.14
illustra una ulteriore apparecchiatura azionamento magnetico costruzione 2C in
cui viene prestato vettore magnete spaziatura possibilità di regolazione.
Questa costruzione è sostanzialmente simile alla costruzione 2B Figg.8-12B,
tranne che la posizione
Anche
se ciascuna delle forme di realizzazione magnetici apparecchi unità di cui
sopra si basano su accordi a magneti permanenti con quattro magneti ciascuno,
altri accordi magnete sarebbe anche possibile. Gli esempi includono, ma non
sono limitati a, le modalità di magnete di cui otto magneti, dodici magneti,
sedici magneti, una ventina di magneti, ventiquattro magneti, ecc, come gli
accordi di quattro magneti illustrati, questi accordi magnete alternative
possono essere configurati come una calamita simmetrica modello che definisce
una forma poligonale corrispondente al numero di magneti in ogni composizione.
regime magneti aventi due (o più) modelli di magneti poligonali in una
relazione nidificata sarebbe anche possibile. Su ogni lato
Sebbene
le costruzioni magnetiche cinematismo descritti finora hanno tre vettori
magnete 4, 8 e 12 disposti a formare dual zone di interazione magnetica 15A e
15B, altre costruzioni sarebbe anche possibile. Ad esempio, un apparecchio di
azionamento magnetico secondo la presente descrizione può essere costruito con
due vettori magneti contrapposti disposti a formare una singola zona di
interazione magnetica. Come nelle precedenti costruzioni, le modalità magnete
opposte sono configurati per produrre interazioni magnetiche quando i portatori
magneti contrapposti sottoposti a rotazione relativa.
Figg.15-18
illustrano un esempio magnetica cinematismo costruzione 2D rappresentano una
forma di realizzazione a singolo magnetico zona di interazione che utilizza due
vettori magnete. Nella magnetica 2D azionamento struttura di apparecchio, vi è
solo il primo vettore magnete 4 e il vettore magnete intermedio 12 che fornisce
un unico magnetico 15A zona di interazione. Il secondo vettore magnete 8 e la
seconda zona 15B interazione magnetica non sono presenti. Le interazioni
magnetiche nella zona di interazione magnetica 15A durante la rotazione
relativa dei vettori magnetici opposti 4 e 12 (vedi frecce "A" e
"B") producono forze ictus potere che causano i vettori magnetici a
subire alternativo relativa in prima e seconda direzione ictus durante porzioni
di zona della
Le
zone di potenza sono illustrati in Figg.15 e 16, e sono caratterizzati da
opposti poli magnetici del regime magneti contrapposti 6 e 14 essendo tra loro
coassialmente allineati e produzione massima spingere o tirare forze
magnetiche. In particolare, Fig.15 mostra una prima zona di alimentazione in
cui i vettori magnete 4 e 12 sono respinti distanti (vedi frecce
"D"), e Fig.16 mostra una seconda zona di alimentazione in cui i
vettori magnetici sono attratti verso l'altra (vedi frecce "E"). Le
interazioni magnetiche producono sostanzialmente nessuna forza ictus
alimentazione durante porzioni zona morta la rotazione relativa. Le posizioni
delle zone morte sono esemplificate in Figg.17 e 18, e sono caratterizzate da
opposti poli magnetici degli accordi magnete opposte 6 e 14 essendo
reciprocamente coassiali allineati, ma la produzione di un sostanzialmente
uguale equilibrio di push e pull forze magnetiche. Come nelle forme di
realizzazione precedenti, la rotazione relativa e movimento alternativo possono
essere sincronizzati in modo che le zone morte coincidono con il punto morto
superiore e punto morto posizioni relative pendolamento inferiori dei vettori
magnete 4 e 12, e in modo che si verificano le zone di potenza quando
l'apparecchiatura azionamento magnetico è tra il punto morto superiore e punto
morto posizioni di pendolamento relative inferiori. Analogamente, la rotazione
relativa e movimento alternativo potrebbe essere sincronizzati in modo che
dette zone morte sono regolabili dinamicamente in posizione o dimensioni.
Si
comprenderà che ulteriori costruzioni apparecchi azionamento magnetico possono
essere implementati utilizzando più insiemi di vettori magnetici. Un esempio di
configurazione è indicato dalla magnetica cinematismo costruzione 2E di Fig.19.
L'unità magnetica struttura di
apparecchio 2E è basato sull'unità magnetica struttura di apparecchio 2A di
Fig.7, salvo che ci sono due serie di vettori magnetici, ciascuno comprendente
primo, secondo e intermedi vettori magnete 4, 8 e 12, montato sul principale
albero 16. Come nel magnetica cinematismo costruzione 2A, un componente di
un'unità di ingresso 21 è accoppiata alla prima porzione di estremità 20
dell'albero principale 16. la seconda porzione di estremità 22 dell'albero
principale 16 è operativamente accoppiato ad una singola uscita girevole 23, ad
esempio un albero motore.
Fig.20
mostra un altro 2F Apparecchi, azionamento magnetico che si basa anche sul
disco magnetico Apparecchi, 2A di Fig.7, tranne che ci sono due alberi
principali 16, ciascuno con il proprio insieme di vettori primo, secondo e
intermedi magnete 4, 8 e 12. ciascun albero principale 16 presenta un proprio
elemento di azionamento ingresso 21 accoppiato alla porzione di estremità primo
albero 20. Tuttavia, la seconda porzione di estremità 22 di ciascun albero
principale 16 è accoppiato ad una singola uscita rotante 23, ad esempio un
albero motore.
Si
noterà che le forme realizzative Figs.19 e 20 possono avere qualsiasi numero di
gruppi carrier magnete. Come si vede, ogni set vettore magnete potrebbe avere
tre vettori magneti che formano due zone interazione magnetica. In alternativa,
alcuni o tutti i set magnete potrebbe essere basata sulla realizzazione di
Figs.15-18, con due vettori magnete formando una zona di interazione magnetica.
Patrick Kelly